效果图
低于20厘米语音提醒字体变红
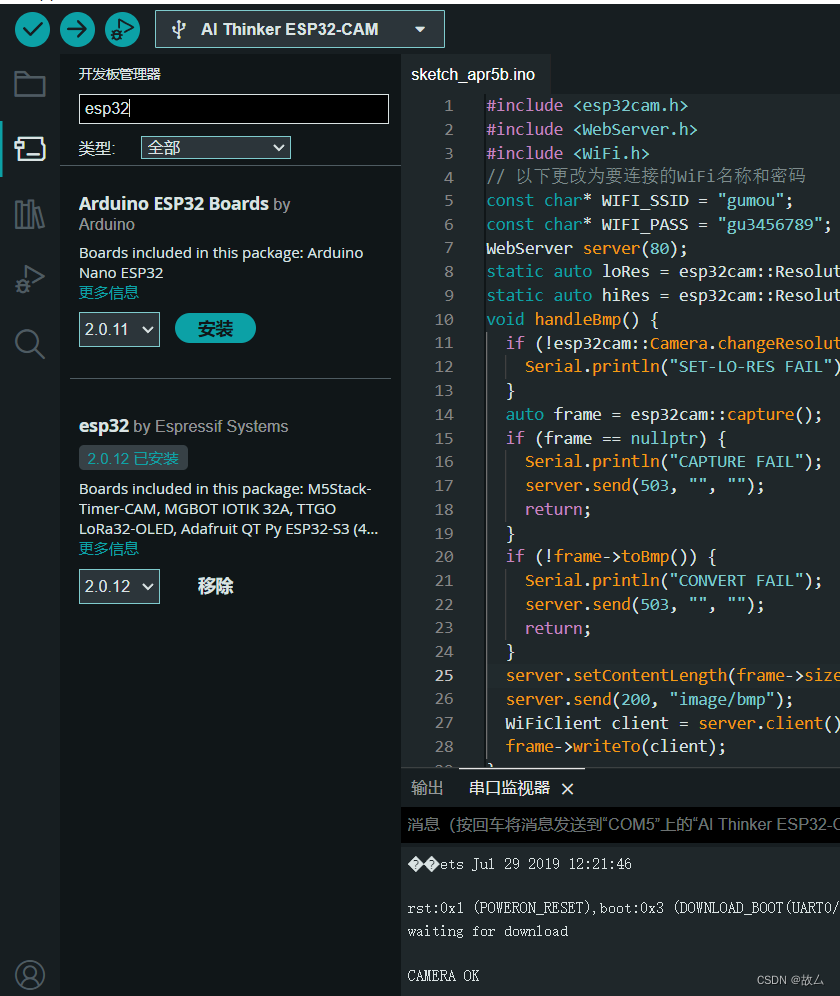
Arduino代码
可直接复制使用(修改自己的WIFI)
#include <esp32cam.h>
#include <WebServer.h>
#include <WiFi.h>
// 设置要连接的WiFi名称和密码
const char* WIFI_SSID = "gumou";
const char* WIFI_PASS = "gu3456789";
WebServer server(80);
// 设置不同分辨率的静态变量
static auto loRes = esp32cam::Resolution::find(320, 240);
static auto hiRes = esp32cam::Resolution::find(1280, 1024);
// 处理BMP图像请求
void handleBmp() {
if (!esp32cam::Camera.changeResolution(loRes)) {
Serial.println("SET-LO-RES FAIL");
}
auto frame = esp32cam::capture();
if (frame == nullptr) {
Serial.println("CAPTURE FAIL");
server.send(503, "", "");
return;
}
if (!frame->toBmp()) {
Serial.println("CONVERT FAIL");
server.send(503, "", "");
return;
}
server.setContentLength(frame->size());
server.send(200, "image/bmp");
WiFiClient client = server.client();
frame->writeTo(client);
}
// 服务JPG图像请求
void serveJpg() {
auto frame = esp32cam::capture();
if (frame == nullptr) {
Serial.println("CAPTURE FAIL");
server.send(503, "", "");
return;
}
server.setContentLength(frame->size());
server.send(200, "image/jpeg");
WiFiClient client = server.client();
frame->writeTo(client);
}
// 处理低分辨率JPG请求
void handleJpgLo() {
if (!esp32cam::Camera.changeResolution(loRes)) {
Serial.println("SET-LO-RES FAIL");
}
serveJpg();
}
// 处理高分辨率JPG请求
void handleJpgHi() {
if (!esp32cam::Camera.changeResolution(hiRes)) {
Serial.println("SET-HI-RES FAIL");
}
serveJpg();
}
// 处理JPG请求
void handleJpg() {
server.sendHeader("Location", "/cam-hi.jpg");
server.send(302, "", "");
}
// 处理MJPEG流请求
void handleMjpeg() {
if (!esp32cam::Camera.changeResolution(hiRes)) {
Serial.println("SET-HI-RES FAIL");
}
Serial.println("STREAM BEGIN");
WiFiClient client = server.client();
auto startTime = millis();
int res = esp32cam::Camera.streamMjpeg(client);
if (res <= 0) {
Serial.printf("STREAM ERROR %d\n", res);
return;
}
auto duration = millis() - startTime;
Serial.printf("STREAM END %dfrm %0.2ffps\n", res, 1000.0 * res / duration);
}
void setup() {
Serial.begin(115200);
Serial.println();
// 初始化摄像头
{
using namespace esp32cam;
Config cfg;
cfg.setPins(pins::AiThinker);
cfg.setResolution(hiRes);
cfg.setBufferCount(2);
cfg.setJpeg(80);
bool ok = Camera.begin(cfg);
Serial.println(ok ? "CAMERA OK" : "CAMERA FAIL");
}
// 连接WiFi
WiFi.persistent(false);
WiFi.mode(WIFI_STA);
WiFi.begin(WIFI_SSID, WIFI_PASS);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
// 打印服务器地址和端口
Serial.print("http://");
Serial.println(WiFi.localIP());
Serial.println(" /cam.bmp");
Serial.println(" /cam-lo.jpg");
Serial.println(" /cam-hi.jpg");
Serial.println(" /cam.mjpeg");
// 定义服务器路由
server.on("/cam.bmp", handleBmp);
server.on("/cam-lo.jpg", handleJpgLo);
server.on("/cam-hi.jpg", handleJpgHi);
server.on("/cam.jpg", handleJpg);
server.on("/cam.mjpeg", handleMjpeg);
// 启动服务器
server.begin();
}
void loop() {
// 处理客户端请求
server.handleClient();
}
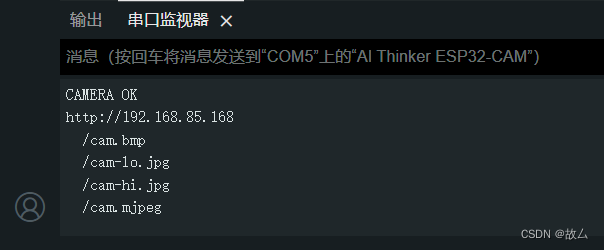
查看Esp32的IP地址
录入后,在串口监视器处查看IP(自动会输出)
录入前要把波特率调整115200
python端计算代码
import urllib
import cv2
import numpy as np
from cvzone.FaceMeshModule import FaceMeshDetector
import pygame
import threading
from PIL import Image, ImageDraw, ImageFont
# 初始化pygame.mixer
pygame.mixer.init()
# 加载音频文件
pygame.mixer.music.load('7359.wav') # 靠的太近啦音频
detector = FaceMeshDetector(maxFaces=1)
url = 'http://192.168.85.168/cam-hi.jpg' # 改成自己的IP地址+/cam-hi.jpg
# 定义播放音频的函数
def play_audio():
pygame.mixer.music.play(1)
while pygame.mixer.music.get_busy():
continue
# 函数:从ESP32CAM获取图像
def get_esp32cam_image(url):
img_resp = urllib.request.urlopen(url)
img_np = np.array(bytearray(img_resp.read()), dtype=np.uint8)
img = cv2.imdecode(img_np, -1)
return img
# 开始检测人脸距离
while True:
# 从ESP32CAM获取图像
img = get_esp32cam_image(url)
# 检测人脸
img, faces = detector.findFaceMesh(img, draw=False)
if faces:
face = faces[0]
point_left = face[145]
point_right = face[374]
w, _ = detector.findDistance(point_left, point_right)
W = 6.3
f = 600
d = (W * f) / w
print(d)
# 设置距离颜色
if d < 20:
print("过近提醒")
# 检查是否正在播放音频
if not pygame.mixer.music.get_busy():
# 使用线程播放音频,避免阻塞主程序
audio_thread = threading.Thread(target=play_audio)
audio_thread.start()
text_color = (255, 0, 0) # 红色
else:
text_color = (0, 0, 255) # 蓝色
# 将Depth文本显示为汉语
pil_img = Image.fromarray(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
draw = ImageDraw.Draw(pil_img)
font = ImageFont.truetype("msyh.ttc", 36) # 使用微软雅黑字体,大小为36
draw.text((face[10][0] - 95, face[10][1] - 5), f'距离:{int(d)}厘米', font=font, fill=text_color)
img = cv2.cvtColor(np.array(pil_img), cv2.COLOR_RGB2BGR)
cv2.imshow("Distance recognition", img) #这行注释掉后可以不显示摄像头窗口只输出距离
if cv2.waitKey(1) == ord('q'):
break
cv2.destroyAllWindows()手机端查看 IP地址同上
图片
http://192.168.85.168/cam-hi.jpg
视频
http://192.168.85.168/cam.mjpeg
项目踩坑
1.驱动ESP32-CAM 这里下载zip自己导入
2.配置开发板
Arduino中文社区
从这里下载会自动安装指定位置
不要在图中位置配置,速度太慢!!
3.python识别面部距离,需要电脑端和esp32-cam同时连接一个WIFI
由于esp32-cam连WIFI能力较差
(若手机开热点供双方连接,建议esp32-cam先连接后再让电脑连)

![[StartingPoint][Tier1]Crocodile](https://img-blog.csdnimg.cn/img_convert/6a6e016ae303f164f5fb76e63ec0f07b.jpeg)






![[VulnHub靶机渗透] pWnOS 2.0](https://img-blog.csdnimg.cn/direct/0b9dd1d29c6e4c6181c58ee04faba763.png)