-----CAN1_Mode_Init
CAN模式初始化函数:u8 CAN1_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
//CAN初始化
//tsjw:重新同步跳跃时间单元.范围:CAN_SJW_1tq~ CAN_SJW_4tq
//tbs2:时间段2的时间单元. 范围:CAN_BS2_1tq~CAN_BS2_8tq;
//tbs1:时间段1的时间单元. 范围:CAN_BS1_1tq ~CAN_BS1_16tq
//brp :波特率分频器.范围:1~1024; tq=(brp)*tpclk1
//波特率=Fpclk1/((tbs1+1+tbs2+1+1)*brp);
//mode:CAN_Mode_Normal,普通模式;CAN_Mode_LoopBack,回环模式;
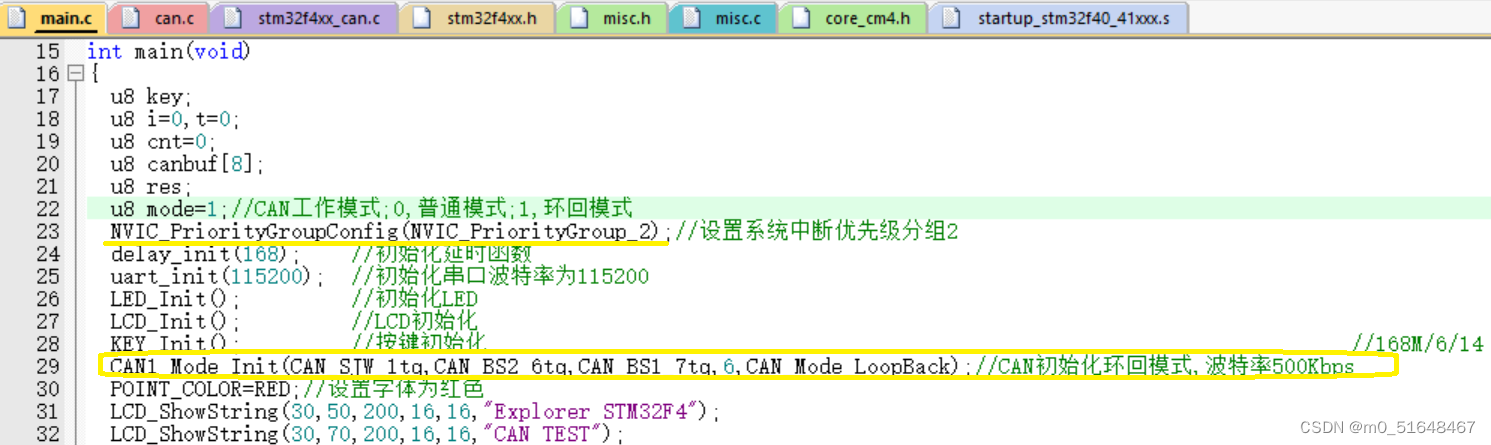
//Fpclk1的时钟在初始化的时候设置为42M,如果设置CAN1_Mode_Init(CAN_SJW_1tq,CAN_BS2_6tq,CAN_BS1_7tq,6,CAN_Mode_LoopBack);
//则波特率为:42M/((6+7+1)*6)=500Kbps
//返回值:0,初始化OK;
// 其他,初始化失败;
u8 CAN1_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
#if CAN1_RX0_INT_ENABLE
NVIC_InitTypeDef NVIC_InitStructure;
#endif
//使能相关时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能PORTA时钟 /AHB1ENR位 0 GPIOAEN:IO 端口 A 时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1时钟 /APB1ENR位 25 CAN1EN:CAN 1 时钟使能
//初始化GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11| GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA11,PA12
//引脚复用映射配置
GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_CAN1); //GPIOA11复用为CAN1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource12,GPIO_AF_CAN1); //GPIOA12复用为CAN1
//CAN单元设置
CAN_InitStructure.CAN_TTCM=DISABLE; //非时间触发通信模式
CAN_InitStructure.CAN_ABOM=DISABLE; //软件自动离线管理
CAN_InitStructure.CAN_AWUM=DISABLE;//睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位)
CAN_InitStructure.CAN_NART=ENABLE; //禁止报文自动传送
CAN_InitStructure.CAN_RFLM=DISABLE; //报文不锁定,新的覆盖旧的
CAN_InitStructure.CAN_TXFP=DISABLE; //优先级由报文标识符决定
CAN_InitStructure.CAN_Mode= mode; //模式设置
CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1tq~CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1范围CAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2;//Tbs2范围CAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //分频系数(Fdiv)为brp+1
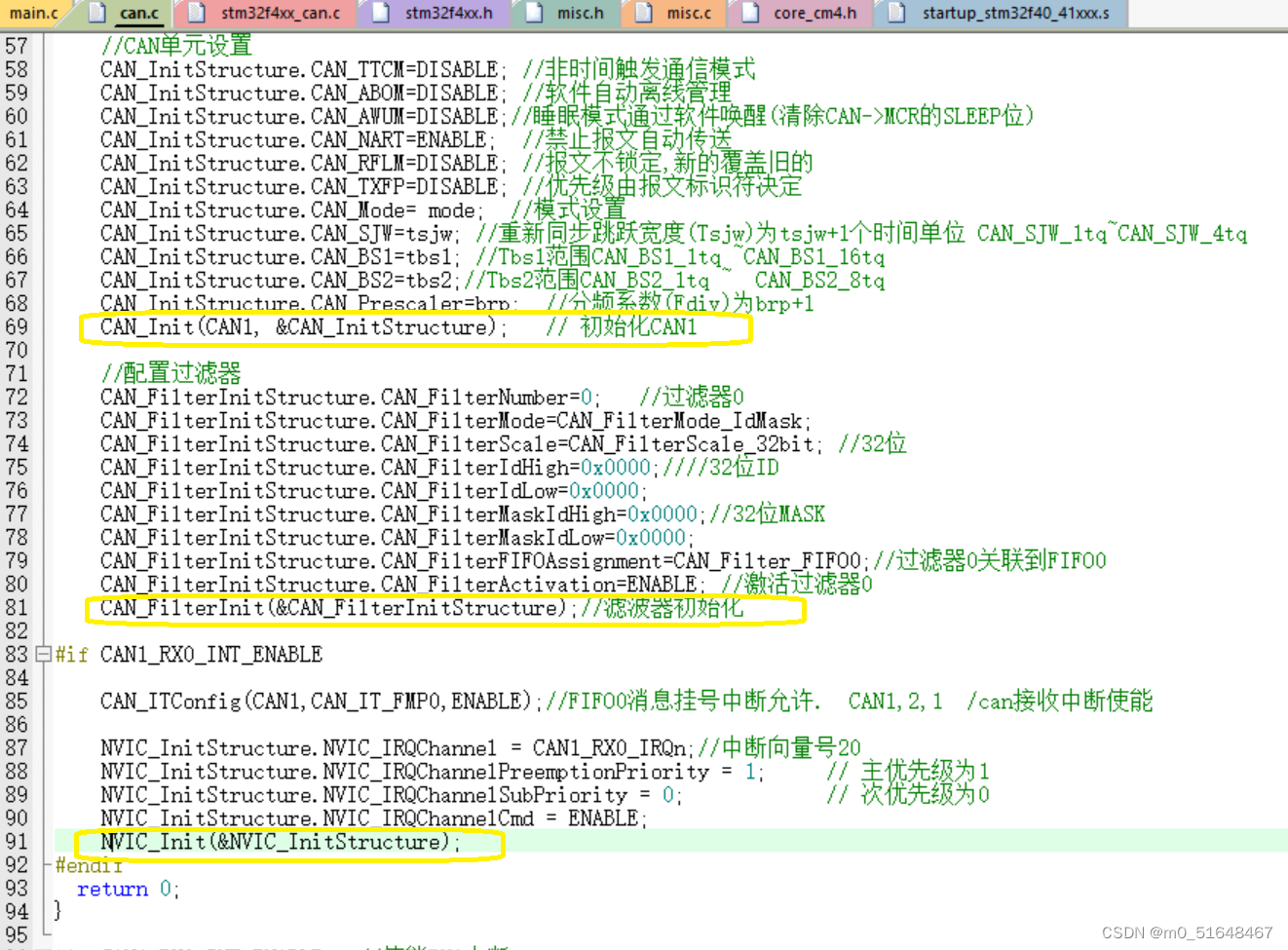
CAN_Init(CAN1, &CAN_InitStructure); // 初始化CAN1
//配置过滤器
CAN_FilterInitStructure.CAN_FilterNumber=0; //过滤器0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;32位ID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//过滤器0关联到FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //激活过滤器0
CAN_FilterInit(&CAN_FilterInitStructure);//滤波器初始化
#if CAN1_RX0_INT_ENABLE
CAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE);//FIFO0消息挂号中断允许.
NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 主优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 次优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
#endif
return 0;
} -----uint8_t CAN_Init /
配置CAN接收滤波器:void CAN_FilterInit /
中断初始化函数:void NVIC_Init
can初始化(寄存器操作):uint8_t CAN_Init(CAN_TypeDef* CANx, CAN_InitTypeDef* CAN_InitStruct)
uint8_t CAN_Init(CAN_TypeDef* CANx, CAN_InitTypeDef* CAN_InitStruct)
{
uint8_t InitStatus = CAN_InitStatus_Failed;
uint32_t wait_ack = 0x00000000;
/* Check the parameters */
assert_param(IS_CAN_ALL_PERIPH(CANx));
assert_param(IS_FUNCTIONAL_STATE(CAN_InitStruct->CAN_TTCM));
assert_param(IS_FUNCTIONAL_STATE(CAN_InitStruct->CAN_ABOM));
assert_param(IS_FUNCTIONAL_STATE(CAN_InitStruct->CAN_AWUM));
assert_param(IS_FUNCTIONAL_STATE(CAN_InitStruct->CAN_NART));
assert_param(IS_FUNCTIONAL_STATE(CAN_InitStruct->CAN_RFLM));
assert_param(IS_FUNCTIONAL_STATE(CAN_InitStruct->CAN_TXFP));
assert_param(IS_CAN_MODE(CAN_InitStruct->CAN_Mode));
assert_param(IS_CAN_SJW(CAN_InitStruct->CAN_SJW));
assert_param(IS_CAN_BS1(CAN_InitStruct->CAN_BS1));
assert_param(IS_CAN_BS2(CAN_InitStruct->CAN_BS2));
assert_param(IS_CAN_PRESCALER(CAN_InitStruct->CAN_Prescaler));
/* Exit from sleep mode */
CANx->MCR &= (~(uint32_t)CAN_MCR_SLEEP);//2取反再与,CAN_MCR位1清0,此位由软件清零时,将退出睡眠模式
/* Request initialisation */
CANx->MCR |= CAN_MCR_INRQ ;//CAN_MCR位0置1软件通过将此位置 1 来请求 CAN 硬件进入初始化模式
/* Wait the acknowledge *///退出初始化模式等待确认
while (((CANx->MSR & CAN_MSR_INAK) != CAN_MSR_INAK) && (wait_ack != INAK_TIMEOUT))
{//MSR位0 CAN 硬件退出初始化模式(以在 CAN 总线上进行同步)时,此位由硬件清零。(非初始化模式为0)
wait_ack++; //加到0x0000FFFF退出循环
}
//程序在这里由上面的程序到下面,1-未进入初始化模式超时,2-上面的while不成立,已经进入初始化模式
/* Check acknowledge */
if ((CANx->MSR & CAN_MSR_INAK) != CAN_MSR_INAK)//已经退出初始化模式
{
InitStatus = CAN_InitStatus_Failed;
}
else
{
/* Set the time triggered communication mode */
if (CAN_InitStruct->CAN_TTCM == ENABLE)
{
CANx->MCR |= CAN_MCR_TTCM;//MCR位 7 TTCM:时间触发通信模式
}
else
{
CANx->MCR &= ~(uint32_t)CAN_MCR_TTCM;
}
/* Set the automatic bus-off management */
if (CAN_InitStruct->CAN_ABOM == ENABLE)
{
CANx->MCR |= CAN_MCR_ABOM;//MCR位 6 ABOM:自动的总线关闭管理
}
else
{
CANx->MCR &= ~(uint32_t)CAN_MCR_ABOM;
}
/* Set the automatic wake-up mode */
if (CAN_InitStruct->CAN_AWUM == ENABLE)
{
CANx->MCR |= CAN_MCR_AWUM;//位 5 AWUM:自动唤醒模式
}
else
{
CANx->MCR &= ~(uint32_t)CAN_MCR_AWUM;
}
/* Set the no automatic retransmission */
if (CAN_InitStruct->CAN_NART == ENABLE)
{
CANx->MCR |= CAN_MCR_NART; //位 4 NART:禁止自动重发送
}
else
{
CANx->MCR &= ~(uint32_t)CAN_MCR_NART;
}
/* Set the receive FIFO locked mode */
if (CAN_InitStruct->CAN_RFLM == ENABLE)
{
CANx->MCR |= CAN_MCR_RFLM;//位 3 RFLM:接收 FIFO 锁定模式
} //1:接收 FIFO 上溢后锁定。接收 FIFO 装满后,下一条传入消息将被丢弃。
else
{
CANx->MCR &= ~(uint32_t)CAN_MCR_RFLM;
}
/* Set the transmit FIFO priority */
if (CAN_InitStruct->CAN_TXFP == ENABLE)
{
CANx->MCR |= CAN_MCR_TXFP;//位 2 TXFP:发送 FIFO 优先级;0:优先级由消息标识符确定 1:优先级由请求顺序(时间顺序)确定
}
else
{
CANx->MCR &= ~(uint32_t)CAN_MCR_TXFP;
}
/* Set the bit timing register *///CAN 位时序寄存器 CAN_BTR,/位 30 LBKM:环回模式(调试)/位 25:24 SJW:再同步跳转宽度
// 位 19:16 TS1:时间段 1/位 22:20 TS2:时间段 2/位 9:0 BRP:波特率预分频器,tq = (BRP[9:0]+1) x tPCLK(APB的时钟周期)
CANx->BTR = (uint32_t)((uint32_t)CAN_InitStruct->CAN_Mode << 30) | \
((uint32_t)CAN_InitStruct->CAN_SJW << 24) | \
((uint32_t)CAN_InitStruct->CAN_BS1 << 16) | \
((uint32_t)CAN_InitStruct->CAN_BS2 << 20) | \
((uint32_t)CAN_InitStruct->CAN_Prescaler - 1);
/* Request leave initialisation */
CANx->MCR &= ~(uint32_t)CAN_MCR_INRQ;//位 0 INRQ:软件通过将此位清零,来将硬件--切换到正常模式--
/* Wait the acknowledge */
wait_ack = 0;
//MSR位0由硬件置 1,用于向软件指示 CAN 硬件此时处于初始化模式。
while (((CANx->MSR & CAN_MSR_INAK) == CAN_MSR_INAK) && (wait_ack != INAK_TIMEOUT))
{
wait_ack++;
}
//程序到这里:1-处于初始化模式超时,2-上面的while不成立,已经进入正常模式
/* ...and check acknowledged */
if ((CANx->MSR & CAN_MSR_INAK) == CAN_MSR_INAK)//CAN 硬件此时处于初始化模式
{
InitStatus = CAN_InitStatus_Failed;
}
else
{
InitStatus = CAN_InitStatus_Success ;
}
}
/* At this step, return the status of initialization */
return InitStatus;
}配置CAN接收滤波器:void CAN_FilterInit(CAN_FilterInitTypeDef* CAN_FilterInitStruct)
void CAN_FilterInit(CAN_FilterInitTypeDef* CAN_FilterInitStruct)
{
uint32_t filter_number_bit_pos = 0;//下面的x位,代表0..27筛选器的哪一个
/* Check the parameters */
assert_param(IS_CAN_FILTER_NUMBER(CAN_FilterInitStruct->CAN_FilterNumber));
assert_param(IS_CAN_FILTER_MODE(CAN_FilterInitStruct->CAN_FilterMode));
assert_param(IS_CAN_FILTER_SCALE(CAN_FilterInitStruct->CAN_FilterScale));
assert_param(IS_CAN_FILTER_FIFO(CAN_FilterInitStruct->CAN_FilterFIFOAssignment));
assert_param(IS_FUNCTIONAL_STATE(CAN_FilterInitStruct->CAN_FilterActivation));
filter_number_bit_pos = ((uint32_t)1) << CAN_FilterInitStruct->CAN_FilterNumber;
/* Initialisation mode for the filter */
CAN1->FMR |= FMR_FINIT;//位 0 FINIT置1:筛选器进入初始化模式
/* Filter Deactivation */
CAN1->FA1R &= ~(uint32_t)filter_number_bit_pos;//软件将x位置 1 可激活筛选器 x,取反是不激活
/* Filter Scale */
if (CAN_FilterInitStruct->CAN_FilterScale == CAN_FilterScale_16bit)
{
/* 16-bit scale for the filter */
CAN1->FS1R &= ~(uint32_t)filter_number_bit_pos;0:双 16 位尺度配置
/* First 16-bit identifier and First 16-bit mask *///FxR1--标识符和掩码(第1组)或者(列表模式)两个(1和2)标识符
/* Or First 16-bit identifier and Second 16-bit identifier */
CAN1->sFilterRegister[CAN_FilterInitStruct->CAN_FilterNumber].FR1 =
((0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterMaskIdLow) << 16) |
(0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterIdLow);
/* Second 16-bit identifier and Second 16-bit mask *///FxR2--标识符和掩码(第2组)或者(列表模式)两个(3和4)标识符
/* Or Third 16-bit identifier and Fourth 16-bit identifier */
CAN1->sFilterRegister[CAN_FilterInitStruct->CAN_FilterNumber].FR2 =
((0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterMaskIdHigh) << 16) |
(0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterIdHigh);
}
if (CAN_FilterInitStruct->CAN_FilterScale == CAN_FilterScale_32bit)
{
/* 32-bit scale for the filter *///筛选器尺度寄存器 CAN_FS1R位 27:0 FSCx:这些位定义了筛选器13-0的尺度配置。
CAN1->FS1R |= filter_number_bit_pos; //0:双 16 位尺度配置 1:单 32 位尺度配置
/* 32-bit identifier or First 32-bit identifier *///32位标识符(对应FxR2的32掩码)或第一个32位标识符(列表模式)。--FxR1(手册FiRx)
CAN1->sFilterRegister[CAN_FilterInitStruct->CAN_FilterNumber].FR1 =
((0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterIdHigh) << 16) |
(0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterIdLow);
/* 32-bit mask or Second 32-bit identifier *///设置32位掩码或第二个32位标识符(列表模式)--FxR2
CAN1->sFilterRegister[CAN_FilterInitStruct->CAN_FilterNumber].FR2 =
((0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterMaskIdHigh) << 16) |
(0x0000FFFF & (uint32_t)CAN_FilterInitStruct->CAN_FilterMaskIdLow);
}
/* Filter Mode */
if (CAN_FilterInitStruct->CAN_FilterMode == CAN_FilterMode_IdMask)//掩码模式
{
/*Id/Mask mode for the filter*/
CAN1->FM1R &= ~(uint32_t)filter_number_bit_pos;//标识符屏蔽模式
}
else /* CAN_FilterInitStruct->CAN_FilterMode == CAN_FilterMode_IdList *///列表模式
{
/*Identifier list mode for the filter*/
CAN1->FM1R |= (uint32_t)filter_number_bit_pos;//寄存器第几位(哪个筛选器组0...27)标识符列表模式
}
/* Filter FIFO assignment *///过滤器FIFO(先进先出)分配的设置
if (CAN_FilterInitStruct->CAN_FilterFIFOAssignment == CAN_Filter_FIFO0)//FIFO0
{
/* FIFO 0 assignation for the filter */
CAN1->FFA1R &= ~(uint32_t)filter_number_bit_pos;//CAN筛选器FIFO分配寄存器(CAN_FFA1R)0:筛选器分配到FIFO0/1:筛选器分配到 FIFO1
}
if (CAN_FilterInitStruct->CAN_FilterFIFOAssignment == CAN_Filter_FIFO1)//FIFO1
{
/* FIFO 1 assignation for the filter */
CAN1->FFA1R |= (uint32_t)filter_number_bit_pos;
}
/* Filter activation *///过滤器激活的设置
if (CAN_FilterInitStruct->CAN_FilterActivation == ENABLE)
{
CAN1->FA1R |= filter_number_bit_pos;//筛选器 x 激活
}
/* Leave the initialisation mode for the filter */
CAN1->FMR &= ~FMR_FINIT;//位 0 FINIT:筛选器初始化模式,取反就是工作模式
}
中断初始化函数:void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct)
/**
* @brief Initializes the NVIC peripheral according to the specified
* parameters in the NVIC_InitStruct.
* @note To configure interrupts priority correctly, the NVIC_PriorityGroupConfig()
* function should be called before.
* @param NVIC_InitStruct: pointer to a NVIC_InitTypeDef structure that contains
* the configuration information for the specified NVIC peripheral.
* @retval None
*/
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct)
{
uint8_t tmppriority = 0x00, tmppre = 0x00, tmpsub = 0x0F;
/* Check the parameters */
assert_param(IS_FUNCTIONAL_STATE(NVIC_InitStruct->NVIC_IRQChannelCmd));//中断使能参数检查
assert_param(IS_NVIC_PREEMPTION_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority));//抢占优先级
assert_param(IS_NVIC_SUB_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelSubPriority));//相应优先级
if (NVIC_InitStruct->NVIC_IRQChannelCmd != DISABLE)//如中断使能
{
/* Compute the Corresponding IRQ Priority -------*/ //寄存器AIRCR(内核指南手册)位10:8,优先级分组
tmppriority = (0x700 - ((SCB->AIRCR) & (uint32_t)0x700))>> 0x08;//7减AIRCR[10:8]得中断组号
tmppre = (0x4 - tmppriority);//4减中断组号得响应优先级所占的位数(总位数为4,IP[7:4])
tmpsub = tmpsub >> tmppriority;//0x0F左移中断组号得响应优先级最大值
tmppriority = NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority << tmppre;//抢占优先级左移响应优先级位数(相对响应优先级的位置)
tmppriority |= (uint8_t)(NVIC_InitStruct->NVIC_IRQChannelSubPriority & tmpsub);//响应优先级和抢占优先级的4位组合
//假设为分组2(对应寄存器位101,AIRCR寄存器值设0x0F5A0500),抢占1--0100,组合响应3---0111
//AIRCR[31:16]任何对该寄存器的写操作,都必须同时把 0x05FA 写入此段
tmppriority = tmppriority << 0x04;//把优先级值写入NVIC_IP寄存器[7:4]
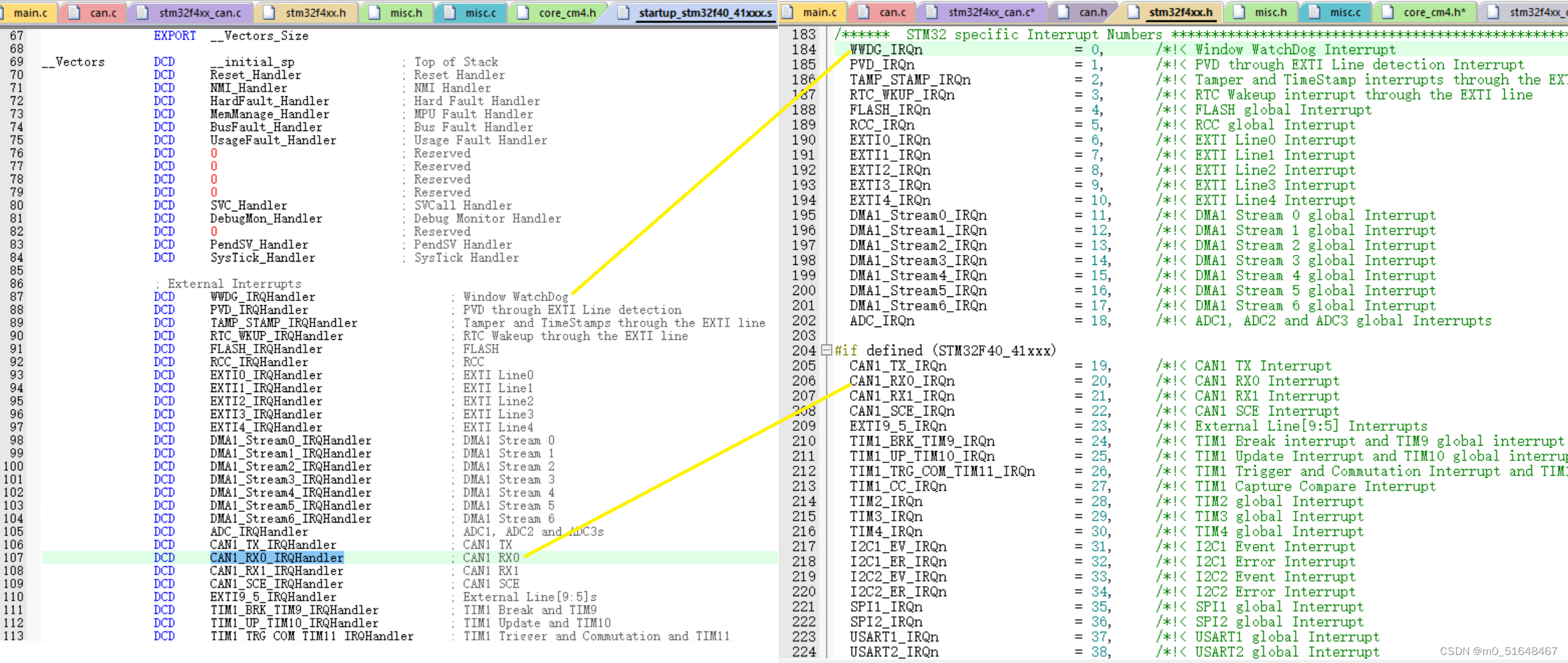
//NVIC_IRQChannel中断源对应中断向量表,例如can1中断,CAN1_RX0_IRQn= 20 , NVIC->IP[20]=0111
NVIC->IP[NVIC_InitStruct->NVIC_IRQChannel] = tmppriority;
/* Enable the Selected IRQ Channels --------------------------------------*/
NVIC->ISER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] = //中断源使能,ISERx是按32位偏移所以左移5,代表是第几个寄存器
(uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);//与0x1F相当于除以32取余,代表在第几位
} //假设中断向量是20,NVIC->ISER[0]=0x01<<0x14//假设中断向量是(USART1_IRQn )37,NVIC->ISER[1]=0x01<<0x05
else//假设中断向量是(I2C1_ER_IRQn)32,NVIC->ISER[1]=0x01<<0x0
{
/* Disable the Selected IRQ Channels -------------------------------------*/
NVIC->ICER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] =//中断源失能
(uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);
}
}-----can发送底层函数:uint8_t CAN_Transmit
can接收底层函数:void CAN_Receive
can发送函数:u8 CAN1_Send_Msg(u8* msg,u8 len)和接收函数:u8 CAN1_Receive_Msg(u8 *buf)
//can发送一组数据(固定格式:ID为0X12,标准帧,数据帧)
//len:数据长度(最大为8)
//msg:数据指针,最大为8个字节.
//返回值:0,成功;
// 其他,失败;
u8 CAN1_Send_Msg(u8* msg,u8 len)
{
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
TxMessage.StdId=0x12; // 标准标识符为0
TxMessage.ExtId=0x12; // 设置扩展标示符(29位)
TxMessage.IDE=0; // 使用扩展标识符,/为0是标准帧,4(二进制100,这样就无需再移位直接对应了寄存器的位)扩展帧
TxMessage.RTR=0; // 消息类型为数据帧,/标准数据帧通常包含8个数据位,0数据帧,2(10)遥控帧
TxMessage.DLC=len; // 数据字段有多少个字节
for(i=0;i<len;i++) //这个循环用于复制数据到TxMessage的数据字段
TxMessage.Data[i]=msg[i];
mbox= CAN_Transmit(CAN1, &TxMessage); // 通过CAN1接口发送TxMessage,返回值是三个邮箱0或1或2
i=0;
while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++; //邮箱的发送消息状态失败等待超时
if(i>=0XFFF)return 1;
return 0; //返回0代表发送成功
}
//can口接收数据查询
//buf:数据缓存区;
//返回值:0,无数据被收到;
// 其他,接收的数据长度;
u8 CAN1_Receive_Msg(u8 *buf)
{
u32 i;
CanRxMsg RxMessage;
if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //CAN_FIFO0挂起的消息数量为0,没有待处理的消息,函数立即返回0,忽略后面的代码
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//能执行到这里,就代表有消息,则从FIFO0中接收该消息
for(i=0;i<RxMessage.DLC;i++)
buf[i]=RxMessage.Data[i];
return RxMessage.DLC; //最后返回接收的数据长度(其数值是通过CAN_Receive函数的调用被填充到RxMessage结构体中的)
}

can发送底层函数:uint8_t CAN_Transmit(CAN_TypeDef* CANx, CanTxMsg* TxMessage)
uint8_t CAN_Transmit(CAN_TypeDef* CANx, CanTxMsg* TxMessage)
{
uint8_t transmit_mailbox = 0;
/* Check the parameters */
assert_param(IS_CAN_ALL_PERIPH(CANx));
assert_param(IS_CAN_IDTYPE(TxMessage->IDE));
assert_param(IS_CAN_RTR(TxMessage->RTR));
assert_param(IS_CAN_DLC(TxMessage->DLC));
/* Select one empty transmit mailbox *///选择一个空邮箱
if ((CANx->TSR&CAN_TSR_TME0) == CAN_TSR_TME0)//TSR位 26,当邮箱 0 没有挂起的发送请求时,此位由硬件置 1。
{
transmit_mailbox = 0;
}
else if ((CANx->TSR&CAN_TSR_TME1) == CAN_TSR_TME1)//TSR位 27,邮箱 1
{
transmit_mailbox = 1;
}
else if ((CANx->TSR&CAN_TSR_TME2) == CAN_TSR_TME2)//TSR位 28,邮箱 2
{
transmit_mailbox = 2;
}
else
{
transmit_mailbox = CAN_TxStatus_NoMailBox;//4
}
if (transmit_mailbox != CAN_TxStatus_NoMailBox)//有邮箱被选中
{
/* Set up the Id */
CANx->sTxMailBox[transmit_mailbox].TIR &= TMIDxR_TXRQ;//位 0 TXRQ:发送邮箱请求/寄存器保留位0,忽略其他位
if (TxMessage->IDE == CAN_Id_Standard)
{
assert_param(IS_CAN_STDID(TxMessage->StdId)); //位 31:21 STID[10:0]/EXID[28:18]:标准标识符或扩展标识符
CANx->sTxMailBox[transmit_mailbox].TIR |= ((TxMessage->StdId << 21) | \
TxMessage->RTR);
}
else
{
assert_param(IS_CAN_EXTID(TxMessage->ExtId));
CANx->sTxMailBox[transmit_mailbox].TIR |= ((TxMessage->ExtId << 3) | \
TxMessage->IDE | \
TxMessage->RTR);
}
/* Set up the DLC */
TxMessage->DLC &= (uint8_t)0x0000000F;
CANx->sTxMailBox[transmit_mailbox].TDTR &= (uint32_t)0xFFFFFFF0;//低4位清0,其他位不变
CANx->sTxMailBox[transmit_mailbox].TDTR |= TxMessage->DLC;
/* Set up the data field *///最多8个(字节)数据占64个位,两个寄存器
CANx->sTxMailBox[transmit_mailbox].TDLR = (((uint32_t)TxMessage->Data[3] << 24) |
((uint32_t)TxMessage->Data[2] << 16) |
((uint32_t)TxMessage->Data[1] << 8) |
((uint32_t)TxMessage->Data[0]));
CANx->sTxMailBox[transmit_mailbox].TDHR = (((uint32_t)TxMessage->Data[7] << 24) |
((uint32_t)TxMessage->Data[6] << 16) |
((uint32_t)TxMessage->Data[5] << 8) |
((uint32_t)TxMessage->Data[4]));
/* Request transmission */
CANx->sTxMailBox[transmit_mailbox].TIR |= TMIDxR_TXRQ;//TIxR寄存器位0置1,用于请求发送相应邮箱的内容
}
return transmit_mailbox;
}
can接收底层函数:void CAN_Receive(CAN_TypeDef* CANx, uint8_t FIFONumber, CanRxMsg* RxMessage)
void CAN_Receive(CAN_TypeDef* CANx, uint8_t FIFONumber, CanRxMsg* RxMessage)//
{
/* Check the parameters */
assert_param(IS_CAN_ALL_PERIPH(CANx));
assert_param(IS_CAN_FIFO(FIFONumber));
/* Get the Id */
RxMessage->IDE = (uint8_t)0x04 & CANx->sFIFOMailBox[FIFONumber].RIR;//形参RxMessage赋值,如果是0,ID标准帧
if (RxMessage->IDE == CAN_Id_Standard)
{
RxMessage->StdId = (uint32_t)0x000007FF & (CANx->sFIFOMailBox[FIFONumber].RIR >> 21);
} //标准帧寄存器值右移21,与7FF是因为标准帧数据只有11位
else
{
RxMessage->ExtId = (uint32_t)0x1FFFFFFF & (CANx->sFIFOMailBox[FIFONumber].RIR >> 3);//扩展帧右移3
}
RxMessage->RTR = (uint8_t)0x02 & CANx->sFIFOMailBox[FIFONumber].RIR;//接收的是数据帧还是遥控帧
/* Get the DLC */
RxMessage->DLC = (uint8_t)0x0F & CANx->sFIFOMailBox[FIFONumber].RDTR;//接收的数据帧长度
/* Get the FMI *///获取筛选器编号/邮箱中存储的消息需要经过该筛选器
RxMessage->FMI = (uint8_t)0xFF & (CANx->sFIFOMailBox[FIFONumber].RDTR >> 8);
/* Get the data field */
RxMessage->Data[0] = (uint8_t)0xFF & CANx->sFIFOMailBox[FIFONumber].RDLR;
RxMessage->Data[1] = (uint8_t)0xFF & (CANx->sFIFOMailBox[FIFONumber].RDLR >> 8);
RxMessage->Data[2] = (uint8_t)0xFF & (CANx->sFIFOMailBox[FIFONumber].RDLR >> 16);
RxMessage->Data[3] = (uint8_t)0xFF & (CANx->sFIFOMailBox[FIFONumber].RDLR >> 24);
RxMessage->Data[4] = (uint8_t)0xFF & CANx->sFIFOMailBox[FIFONumber].RDHR;
RxMessage->Data[5] = (uint8_t)0xFF & (CANx->sFIFOMailBox[FIFONumber].RDHR >> 8);
RxMessage->Data[6] = (uint8_t)0xFF & (CANx->sFIFOMailBox[FIFONumber].RDHR >> 16);
RxMessage->Data[7] = (uint8_t)0xFF & (CANx->sFIFOMailBox[FIFONumber].RDHR >> 24);
/* Release the FIFO */
/* Release FIFO0 *///释放该邮箱
if (FIFONumber == CAN_FIFO0)
{
CANx->RF0R |= CAN_RF0R_RFOM0;//位 5 RFOM0:释放 FIFO 0 输出邮箱,释放后,此位由硬件清零。
}
/* Release FIFO1 */
else /* FIFONumber == CAN_FIFO1 */
{
CANx->RF1R |= CAN_RF1R_RFOM1;
}
}-----中断向量关联图: