红黑树
- 引言
- 红黑树的介绍
- 实现
- 结点类
- insert
- 搜索插入位置
- 插入
- 调整
- 当parent为gparent的左子结点
- 当parent为gparent的右子结点
- 参考源码
- 测试红黑树是否合格
- 总结
引言
在上一篇文章中我们认识了高度平衡的平衡二叉树AVL树:戳我看AVL树详解哦
(关于旋转调整的部分,在AVL树的时候已经详细介绍过了,如果大家对旋转调平衡的部分有疑惑的话,请移步至AVL树的详解)
由于AVL树的高度平衡,其平均搜索时间复杂度几乎可以达到严格的O(logN)。同样也因为平衡的程度很高,在维护平衡上时间的花费对于搜索上时间的提升是得不偿失的。
大多数情况下,我们并不需要很高的平衡程度,只需要达成一种接近平衡的状态,搜索的平均时间复杂度基本达到O(logN)即可。 红黑树就是这样的一种结构,它的最高子树的高度小于等于最低子树的二倍。通过减少调平衡时的时间成本来提高效率:
红黑树的介绍
红黑树是平衡二叉树的一种,他在满足二叉搜索树特性的基础上,给每个结点增加了一个颜色属性,包括Red与Black;并要求从根节点到一个叶子结点形成的任意一条路径中,通过对结点颜色的限制规则,没有任何一条路径回比其他的路径长一倍:

(红黑圣诞树)
对于红黑树结点颜色的限制规则如下:
- 每个结点的颜色只有红色或黑色两种;
- 根结点的颜色一定是黑色的;
- 如果某一个结点的颜色是红色的,它的两个孩子结点的颜色一定是黑色(即不存在两个连续的红色结点);
- 对于任一结点,到叶子结点的任一路径上,包含的黑色结点的数量一定相等;
- 叶子结点一定是黑色的(这里的叶子结点直最后的
nullptr)
当满足上面的所有规则时,根节点到叶子结点的任一路径就都不可能比其他路径长一倍。由于不存在连续的红色结点,所以当黑色结点的数量 n 一定时,最长路径的长度为2 * n,最短路径的长度为 n ,所以不可能相差一倍以上。这样就达成了一种相对平衡的状态,并不需要经常去旋转调平了。
实现
红黑树的实现,在之前的二叉搜索树上增加了结点的颜色,以及对于结点的颜色调整的部分;
在本篇文章中依旧实现 K-V的模式 的树, 并且以非递归实现insert;
为防止命名冲突,将实现放在我们的命名空间qqq中:
结点的颜色我们使用 枚举常量enum Color 来表示;
RBTree是一个类模板,有两个模板参数,即K与V,表示其中存储的索引类型与值类型;
成员变量类型为Node*(由结点类RBTreeNode重命名),表示根结点的指针:
//基本的代码结构
namespace qqq
{
enum Color //枚举常量表示颜色
{
RED,
BLUCK
};
template<class K, class V>
struct RBTreeNode //结点类
{};
template<class K, class V>
class RBTree //红黑树
{
typedef RBTreeNode<K, V> Node;
public:
bool insert(const pair<K, V>& kv)
{}
protected:
Node* _root = nullptr;
};
}
结点类
首先,对红黑树的结点进行实现:
RBTreeNode是也一个类模板, 两个模板参数同样为K与V,表示索引与值的类型;
在结点中储存数据的结构为pair,其中first为K类型,second为V类型;
成员变量包括结点中的数据 _kv;
指向父亲结点的指针 _parent;
指向左右孩子结点的指针 _left 与 _right;
表示结点颜色的枚举常量 _col:
template<class K, class V>
struct RBTreeNode //结点类
{
pair<K, V> _kv;
RBTreeNode<K, V>* _parent;
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
Color _col;
};
结点类的构造函数
我们需要实现一个默认构造函数:
参数类型为const pair<K, V>,缺省值为一个pair<K, V>的匿名对象;
对于父子结点的指针,在初始化列表中初始化为nullptr即可;
对于结点的颜色,在初始化列表中初始化为RED(要保证每条路上黑色结点的个数相等,就必须初始化为红色):
RBTreeNode(const pair<K, V> kv = pair<K, V>())
: _kv(kv)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
insert
红黑树的insert分为两个部分,即搜索并插入以及调整使其满足红黑树的性质:
搜索插入位置
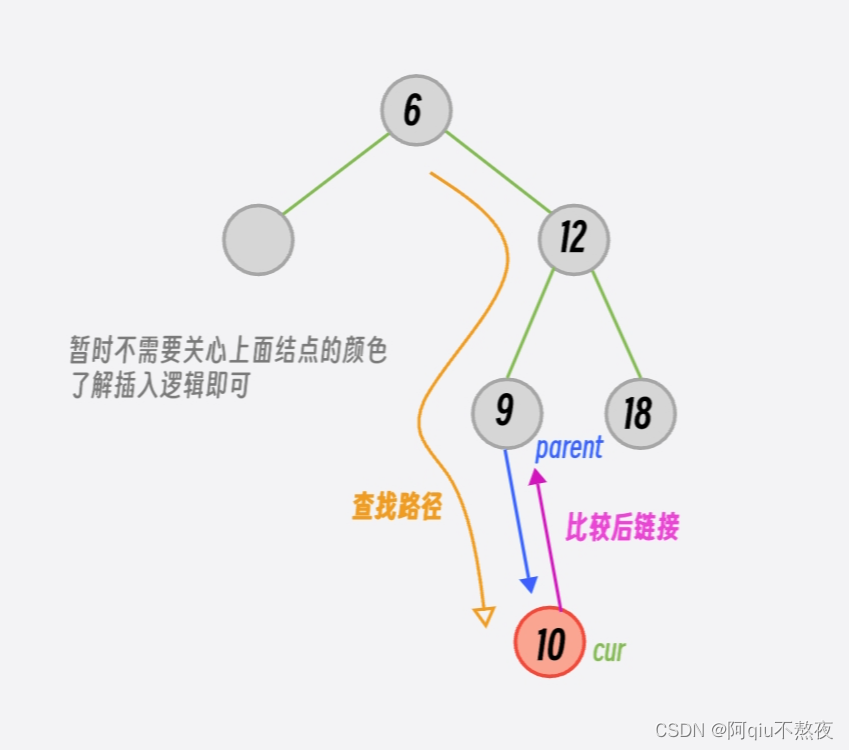
- 与二叉搜索树类似,搜索并插入时,首先用要插入的
pair对象创建一个新结点newnode; - 与此同时,使用结点指针
cur来记录当前位置 ,parent来记录cur的父结点,便于后面插入; - 然后
while循环向下查找 插入的位置:当newnode小于cur的元素时,向左查找,当newnode大于cur的元素时,向右查找,相等时即该元素已经存在,返回false; - 当
cur为nullptr时,表示找到了插入的位置,循环终止:
// 部分代码:搜索插入位置 //
Node* newnode = new Node(kv);
Node* parent = nullptr;
Node* cur = _root;
while (cur != nullptr) //搜索
{
if (newnode->_kv.first > cur->_kv.first)
{
parent = cur;
cur = parent->_right;
}
else if (newnode->_kv.first < cur->_kv.first)
{
parent = cur;
cur = parent->_left;
}
else //相等即插入失败
{
return false;
}
}
插入
- 将
newnode插入红黑树即将newnode与parent链接,这时就需要判断parent是否为空; - 当
parent为空时,即cur就是根节点_root,即newnode是这棵红黑树中的第一个结点,将 其赋值给_root即可; - 当
parent不为空时, 还需要判断cur位于parent的左边还是右边,然后再插入:
// 局部代码:插入newnode //
if (parent == nullptr) //插入
{
_root = newnode;
}
else if (newnode->_kv.first < parent->_kv.first)
{
parent->_left = newnode;
newnode->_parent = parent;
cur = newnode;
}
else
{
parent->_right = newnode;
newnode->_parent = parent;
cur = newnode;
}
调整
在完成插入后,首先需要判断的是parent指针的状态:
- 当
parent为空时,表明当前结点为根结点,将其颜色改为BLACK即可调整完毕; - 当
parent指向结点的颜色为BLACK时,如果是在刚插入时,新插入的结点颜色为RED,不会影响该路径的黑色节点个数,所以不再需要调整。如果是在向上调整的过程中parent指向的结点为BLACK,也意味着整棵树调整结束了(这一点在后面的调整部分会详细介绍); - 除了上面不用调整的两种情况外,其余的情况,即
parent指向的结点存在且为RED的情况就需要进行调整了。调整是自下而上的,循环向上调整,直到parent为空或parent指向的结点为BLACK时循环结束,调整完成
// 部分代码:自下而上调整的循环框架 //
while (parent != nullptr && parent->_col != BLUCK)
{}
开始调整时首先对parent为gparent(cur的祖父结点)的左子结点还是右子结点做一分类讨论(当parent不为黑时,由于根结点必须为黑,所以parent不是根结点,所以gparent一定存在):
当parent为gparent的左子结点
当parent为gparent的左子结点时,我们首先要考察cur叔叔结点的情况:
-
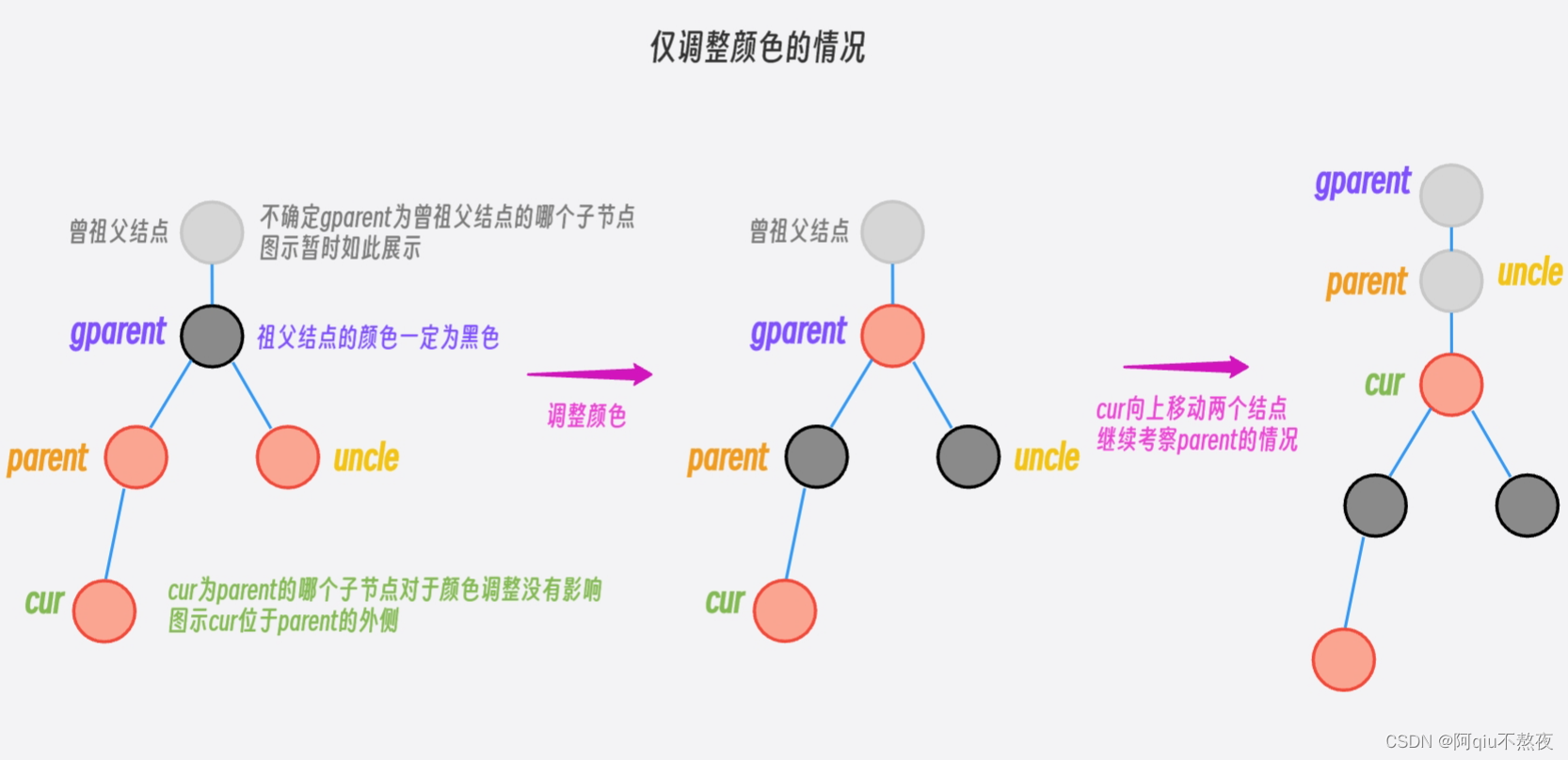
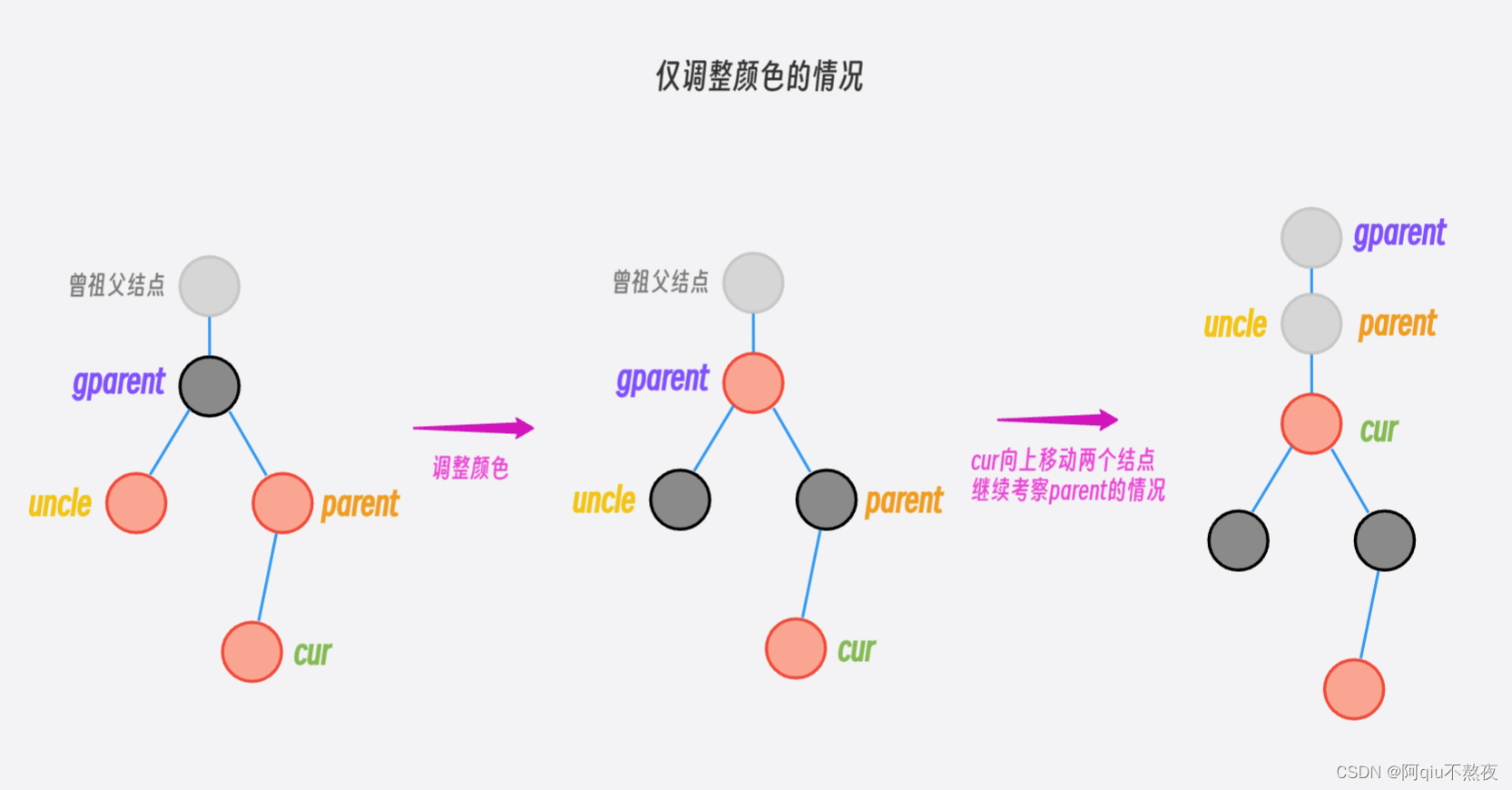
当
cur的叔叔结点为RED时,不需要进行旋转调整,只需要将gparent指向结点设置为RED,将parent和cur的叔叔结点全部设置为BLACK即可:
由于在调整完颜色后,gparent指向结点颜色就为RED了,这时如果gparent父结点的颜色正好为红,就出现了连续的两个红色结点。所以需要将cur向上移动两个结点,再对其parent指向的结点继续进行判断:
-
当
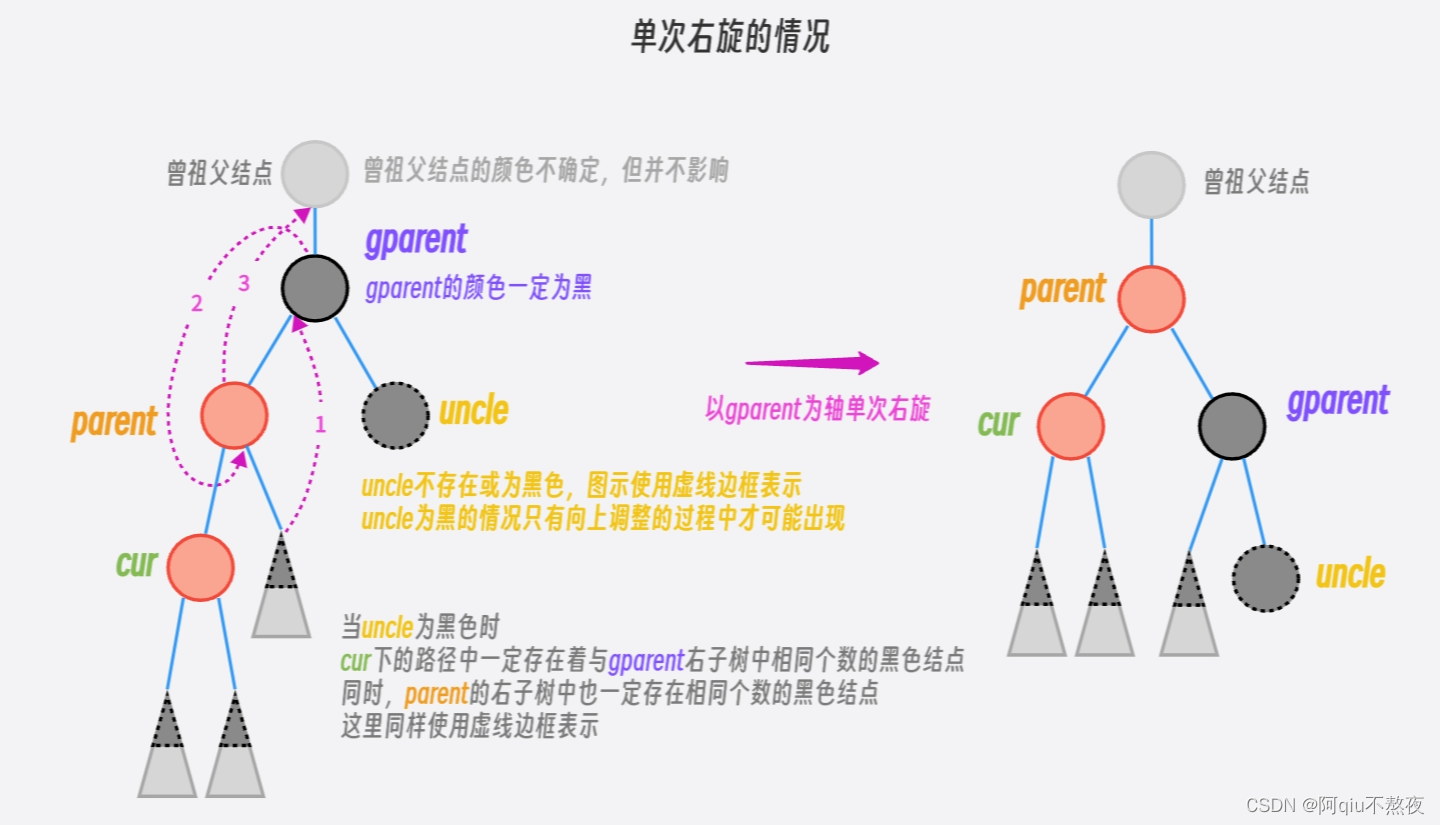
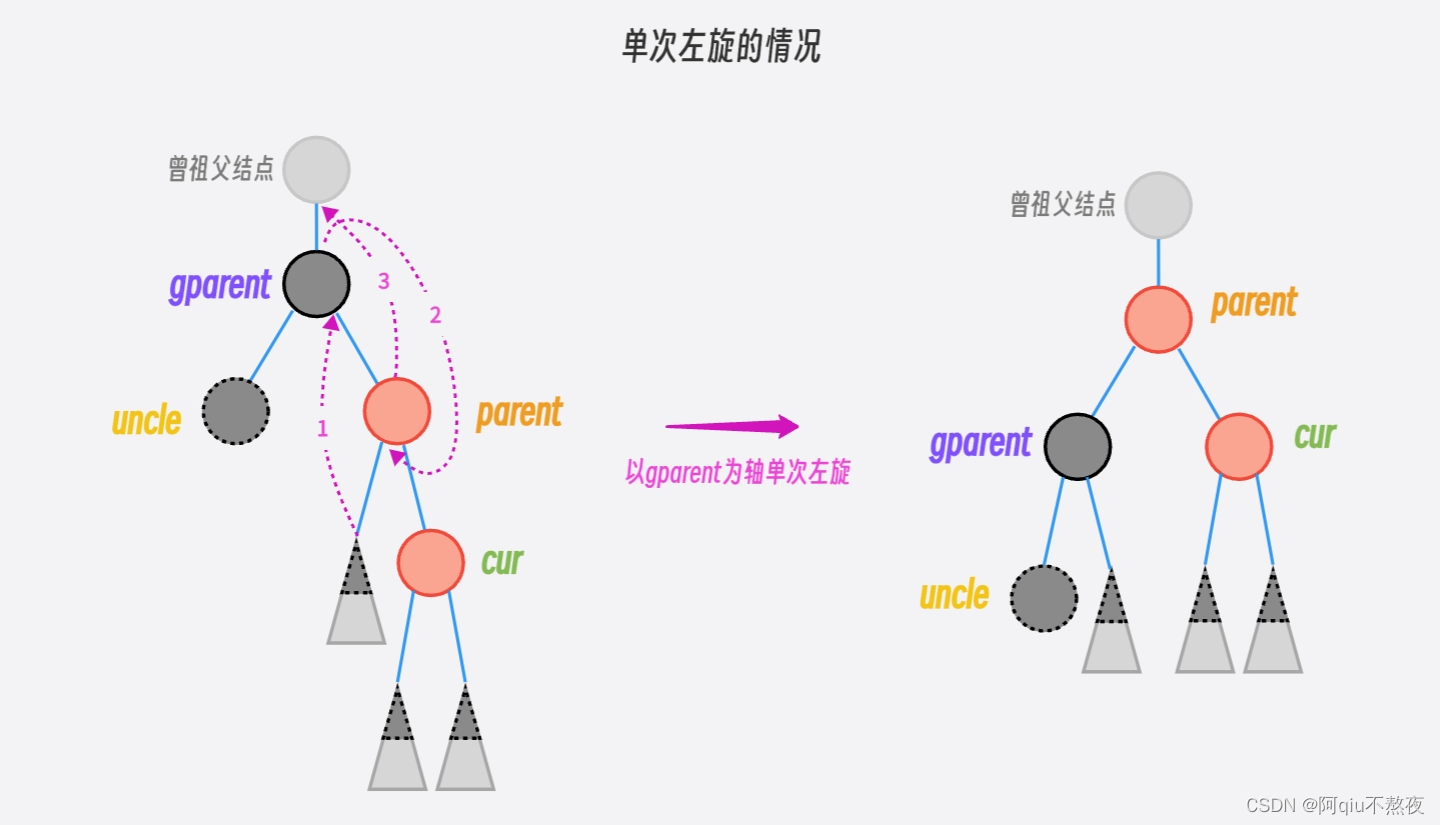
cur的叔叔结点为BLACK或不存在时,就需要进行旋转调整了:
旋转的逻辑与之前AVL树类似,当cur位于parent的左边时,即左左——单次右旋:
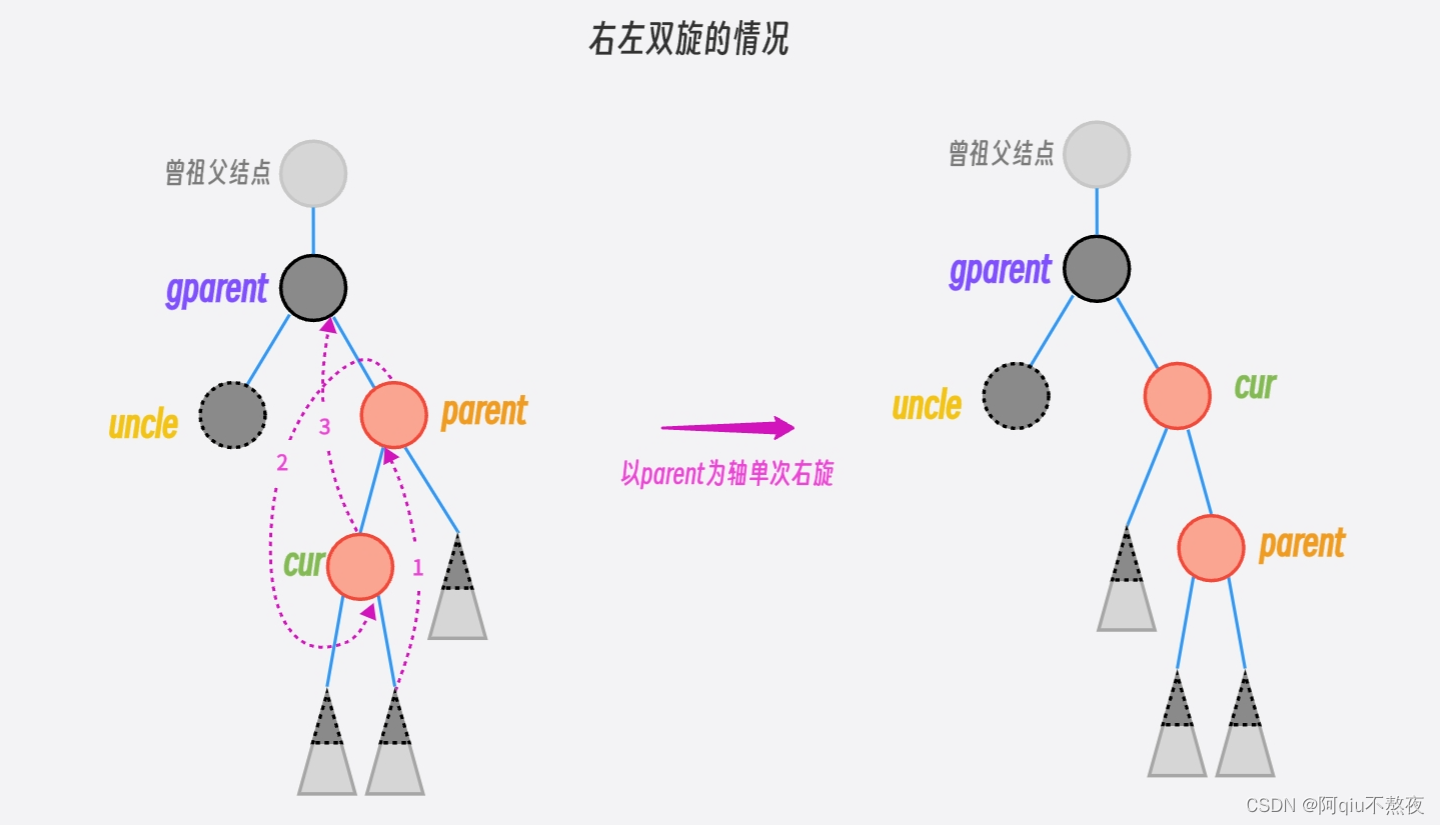
当cur位于parent的右边时,即左右——左右双旋:
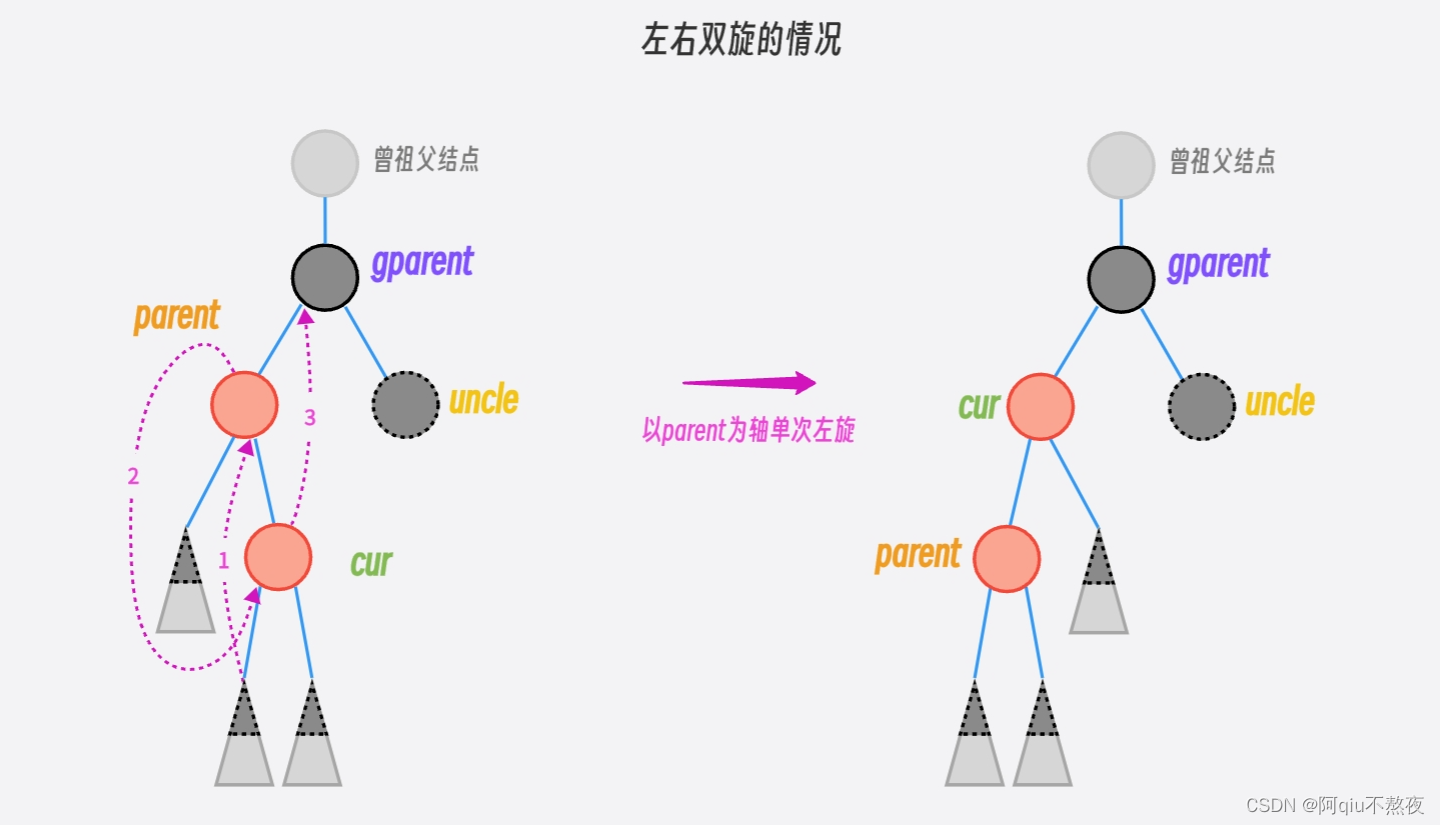
旋转调整后将gparent指向结点设置为RED,将子树顶部的结点设置为BLACK即可(parent指向的结点或cur指向的结点):
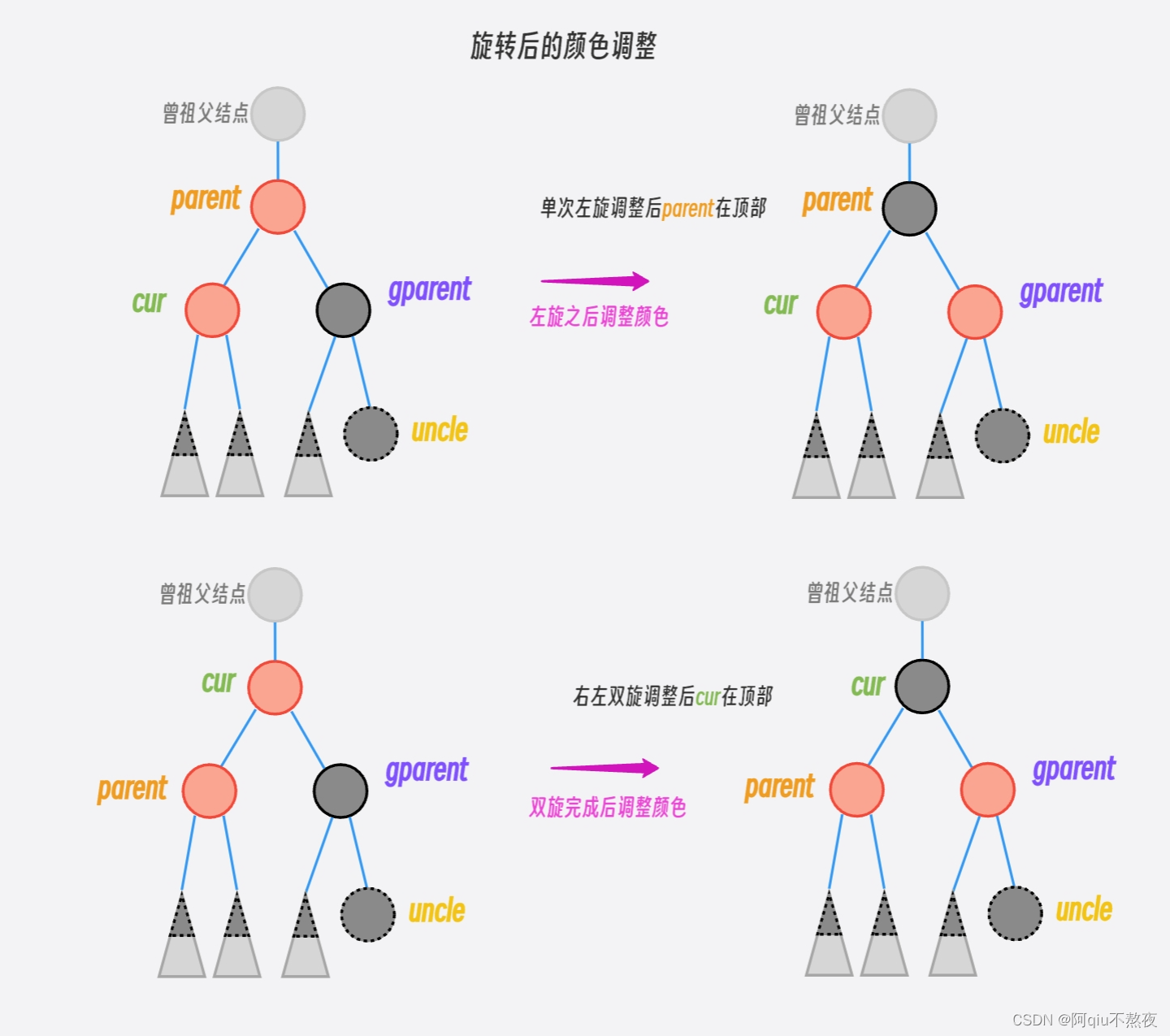
经过旋转后的红黑树,子树顶部的颜色一定为黑色,再向上也就不会存在两个连续的红色结点的问题了,所以旋转之后直接终止循环即可。
需要注意的是:叔叔是黑色结点的情况一定是出现在调整过程中发生的,当叔叔结点为黑色时,cur下的路径中一定存在着与gparent右子树中黑色结点相同个数的黑色结点,parent下的路径中同样也存在着相同数目的黑色结点,这样在旋转调平衡后,这棵子树中的所有路径中的黑色结点数目与之前是不变的。
//部分代码:当parent为gparent左子结点的情况
if (parent == gparent->_left)
{
if (gparent->_right == nullptr || gparent->_right->_col == BLUCK) //1.叔叔结点不存在或为黑,需要旋转并调色
{
if (cur == parent->_left)//左左->单次右旋
{
RotateR(gparent);
parent->_col = BLUCK;
gparent->_col = RED;
}
else//左右->左旋+右旋
{
RotateL(parent);
RotateR(gparent);
cur->_col = BLUCK;
gparent->_col = RED;
}
break; //通过旋转调整后,该子树的根结点一定是黑,所以可以直接结束循环
}
else if (gparent->_right->_col == RED) //2.叔叔结点为红,通过调色即可实现红黑树
{
//调色
parent->_col = BLUCK;
gparent->_right->_col = BLUCK;
gparent->_col = RED;
//继续向上
cur = gparent;
parent = cur->_parent;
}
else
{
assert(0);
}
}
当parent为gparent的右子结点
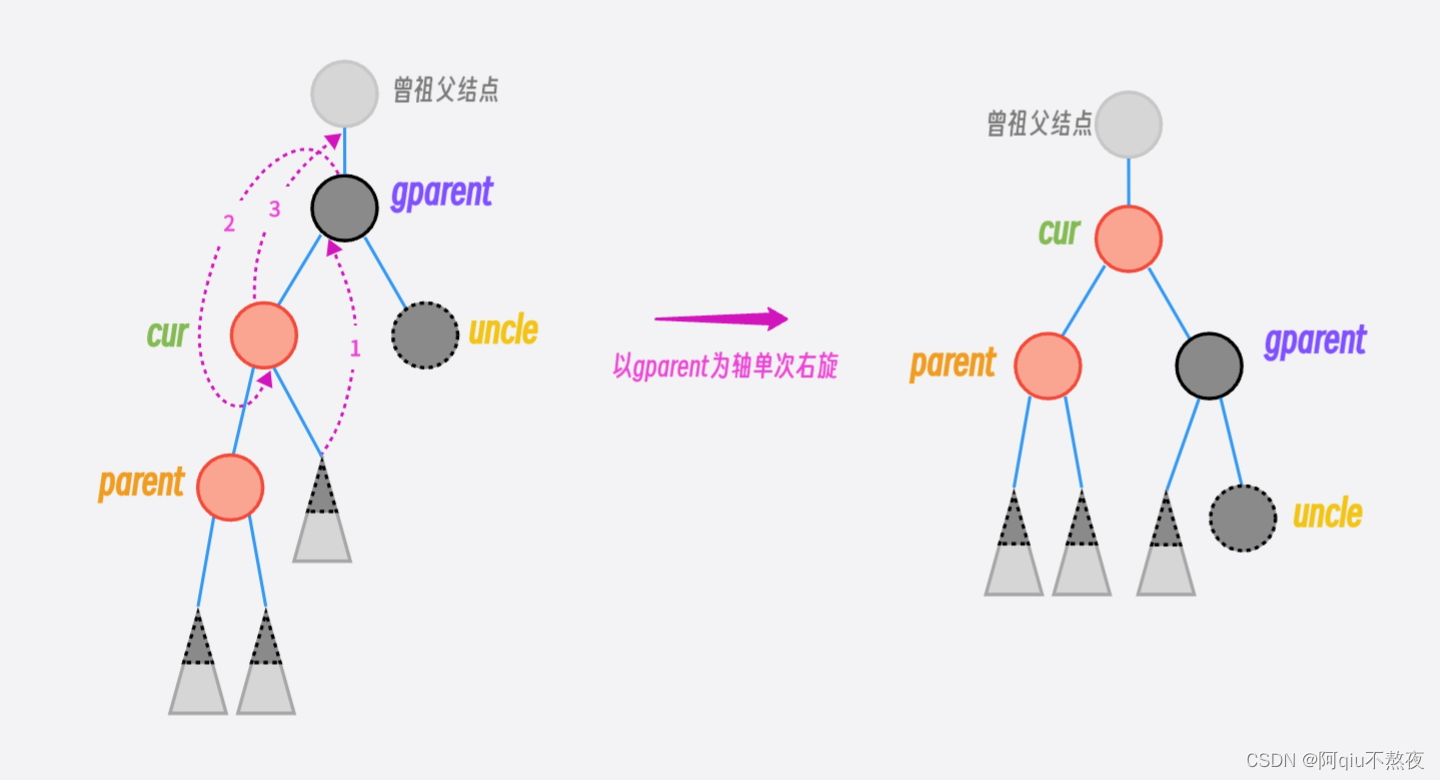
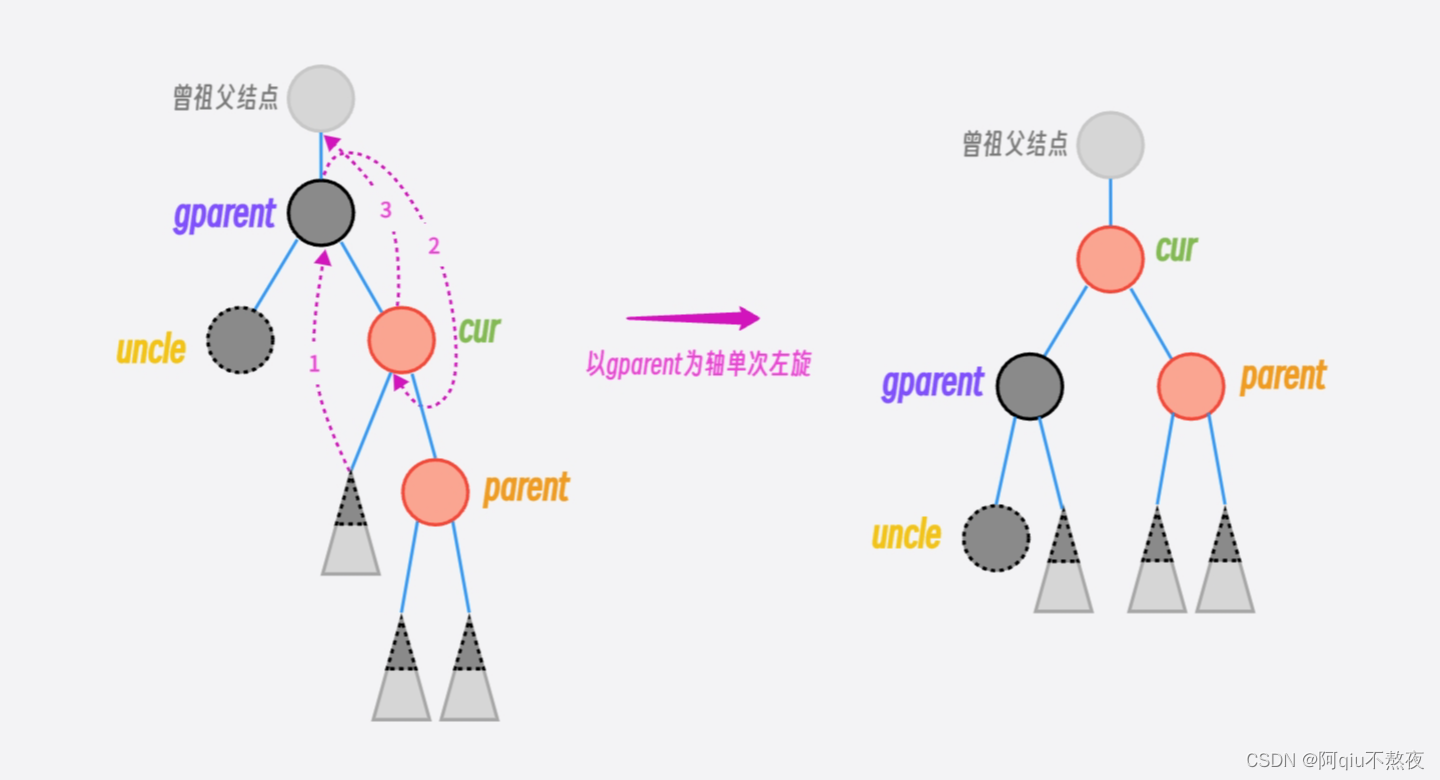
当parent为gparent的右子结点时,与上面的情况一致,只是左右对调了,所以这里只给出图示与代码(如果在这种情况下遇到了问题,希望你在上面的情况中能够找到答案):
-
叔叔结点为
RED,仅调整颜色:
-
叔叔结点为
BLACK或不存在,左单旋或右左双旋:
左单旋:
右左双旋:
旋转后调整颜色:
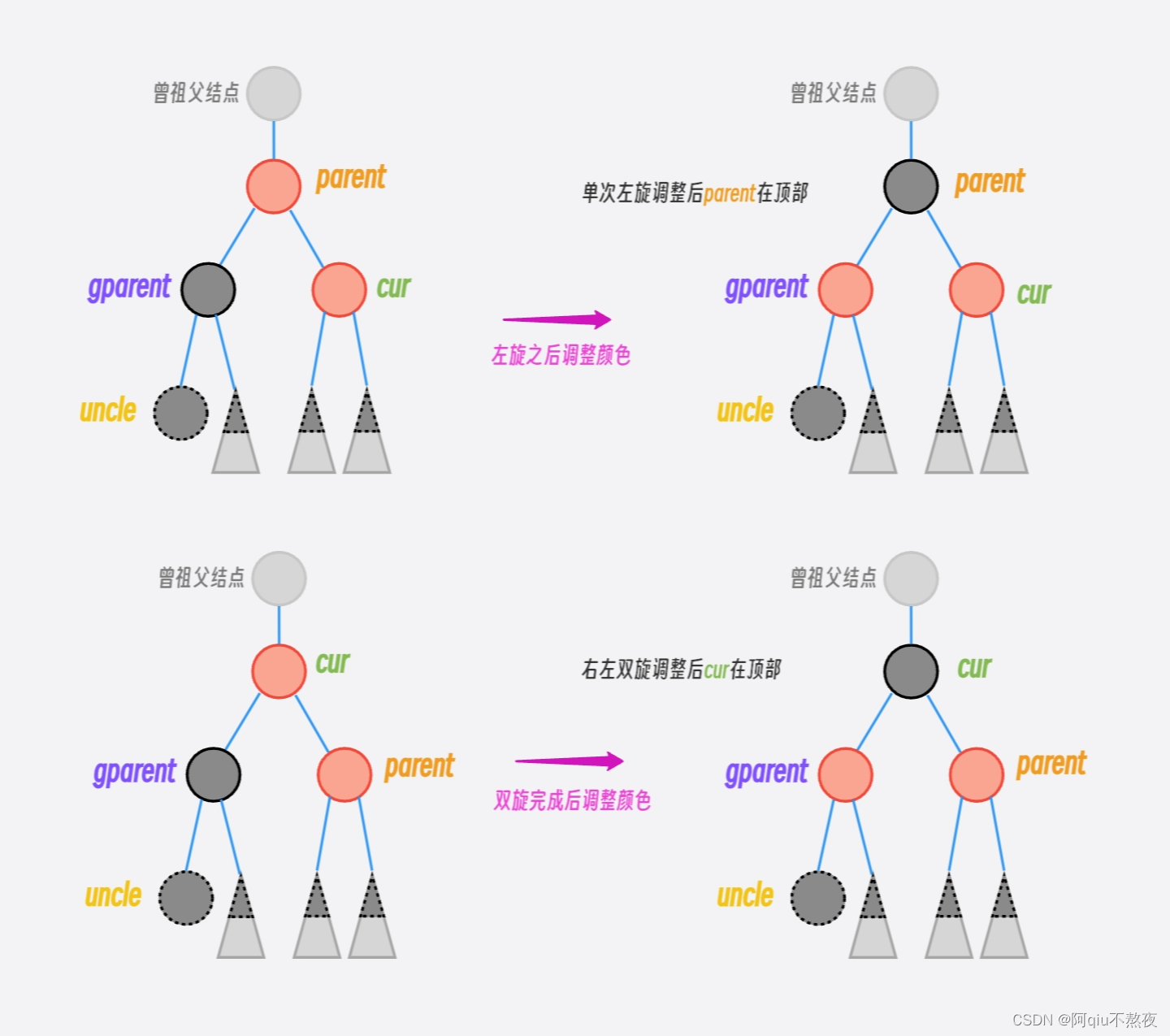
旋转后子树顶部的结点一定为BLACK,所以直接break即可。
//部分代码:当parent为gparent右子结点的情况 //
else //parent == gparent->_right
{
if (gparent->_left == nullptr || gparent->_left->_col == BLUCK) //1.叔叔结点不存在或为黑,需要旋转并调色
{
if (cur == parent->_right)//右右->单次左旋
{
RotateL(gparent);
parent->_col = BLUCK;
gparent->_col = RED;
}
else//右左->右旋+左旋
{
RotateR(parent);
RotateL(gparent);
cur->_col = BLUCK;
gparent->_col = RED;
}
break; //通过旋转调整后,该子树的根结点一定是黑,所以可以直接结束循环
}
else if (gparent->_left->_col == RED) //2.叔叔结点为红,通过调色即可实现红黑树
{
//调色
parent->_col = BLUCK;
gparent->_left->_col = BLUCK;
gparent->_col = RED;
//继续向上
cur = gparent;
parent = cur->_parent;
}
else
{
assert(0);
}
}
在while循环调整结束之后,再将根结点_root的颜色改为BLACK,统一做处理(insert的整体代码在这里就不做展示了,大家跳转至参考源码部分查看即可)。
参考源码
namespace qqq
{
enum Color //枚举常量表示颜色
{
RED,
BLUCK
};
template<class K, class V>
struct RBTreeNode //结点类
{
pair<K, V> _kv;
RBTreeNode<K, V>* _parent;
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
Color _col;
RBTreeNode(const pair<K, V> kv = pair<K, V>())
: _kv(kv)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
};
template<class K, class V>
class RBTree //红黑树
{
typedef RBTreeNode<K, V> Node;
public:
bool insert(const pair<K, V>& kv)
{
//先插入
Node* newnode = new Node(kv);
Node* parent = nullptr;
Node* cur = _root;
while (cur != nullptr) //搜索
{
if (newnode->_kv.first > cur->_kv.first)
{
parent = cur;
cur = parent->_right;
}
else if (newnode->_kv.first < cur->_kv.first)
{
parent = cur;
cur = parent->_left;
}
else //相等即插入失败
{
return false;
}
}
if (parent == nullptr) //插入
{
_root = newnode;
}
else if (newnode->_kv.first < parent->_kv.first)
{
parent->_left = newnode;
newnode->_parent = parent;
cur = newnode;
}
else
{
parent->_right = newnode;
newnode->_parent = parent;
cur = newnode;
}
//调整颜色以及旋转使满足红黑树
while (parent != nullptr && parent->_col != BLUCK) //当parent不为黑时,由于根结点必须为黑,所以parent不是根结点,所以gparent一定存在
{
Node* gparent = parent->_parent;
if (parent == gparent->_left)
{
if (gparent->_right == nullptr || gparent->_right->_col == BLUCK) //1.叔叔结点不存在或为黑,需要旋转并调色
{
if (cur == parent->_left)//左左->单次右旋
{
RotateR(gparent);
parent->_col = BLUCK;
gparent->_col = RED;
}
else//左右->左旋+右旋
{
RotateL(parent);
RotateR(gparent);
cur->_col = BLUCK;
gparent->_col = RED;
}
break; //通过旋转调整后,该子树的根结点一定是黑,所以可以直接结束循环
}
else if (gparent->_right->_col == RED) //2.叔叔结点为红,通过调色即可实现红黑树
{
//调色
parent->_col = BLUCK;
gparent->_right->_col = BLUCK;
gparent->_col = RED;
//继续向上
cur = gparent;
parent = cur->_parent;
}
else
{
assert(0);
}
}
else
{
if (gparent->_left == nullptr || gparent->_left->_col == BLUCK) //1.叔叔结点不存在或为黑,需要旋转并调色
{
if (cur == parent->_right)//右右->单次左旋
{
RotateL(gparent);
parent->_col = BLUCK;
gparent->_col = RED;
}
else//右左->右旋+左旋
{
RotateR(parent);
RotateL(gparent);
cur->_col = BLUCK;
gparent->_col = RED;
}
break; //通过旋转调整后,该子树的根结点一定是黑,所以可以直接结束循环
}
else if (gparent->_left->_col == RED) //2.叔叔结点为红,通过调色即可实现红黑树
{
//调色
parent->_col = BLUCK;
gparent->_left->_col = BLUCK;
gparent->_col = RED;
//继续向上
cur = gparent;
parent = cur->_parent;
}
else
{
assert(0);
}
}
}
_root->_col = BLUCK;
return true;
}
void RotateL(Node* parent)
{
Node* gparent = parent->_parent;
Node* cur = parent->_right;
Node* curleft = cur->_left;
parent->_right = curleft;
if (curleft != nullptr)
{
curleft->_parent = parent;
}
cur->_left = parent;
parent->_parent = cur;
cur->_parent = gparent;
if (gparent == nullptr)
{
_root = cur;
}
else
{
if (cur->_kv.first < gparent->_kv.first)
{
gparent->_left = cur;
}
else
{
gparent->_right = cur;
}
}
}
void RotateR(Node* parent)
{
Node* gparent = parent->_parent;
Node* cur = parent->_left;
Node* curright = cur->_right;
parent->_left = curright;
if (curright != nullptr)
{
curright->_parent = parent;
}
cur->_right = parent;
parent->_parent = cur;
cur->_parent = gparent;
if (gparent == nullptr)
{
_root = cur;
}
else
{
if (cur->_kv.first < gparent->_kv.first)
{
gparent->_left = cur;
}
else
{
gparent->_right = cur;
}
}
}
bool isRBTree()
{
return isRBTree(_root);
}
protected:
Node* _root = nullptr;
bool checkColor(Node* root, int countBluck, int& baseBluck) //计算黑结点数量与红结点连续是否满足条件
{
if (root == nullptr)
{
if (baseBluck == countBluck)
{
return true;
}
return false;
}
if (root->_col == RED && root->_parent != nullptr && root->_parent->_col == RED)
{
return false;
}
if (root->_col == BLUCK)
{
countBluck++;
}
return checkColor(root->_left, countBluck, baseBluck) && checkColor(root->_right, countBluck, baseBluck);
}
bool isRBTree(Node* root)
{
if (root == nullptr)
return true;
if (root->_col == RED)
return false;
//先计算一条路径中的黑色结点数量
int baseBluck = 0;
Node* cur = root;
while (cur != nullptr)
{
if (cur->_col == BLUCK)
{
++baseBluck;
}
cur = cur->_right;
}
return checkColor(root, 0, baseBluck);
}
};
}
测试红黑树是否合格
在写完红黑树的insert之后,我们可以再编写一个测试模块来测试一棵树是否满足红黑树的特性:
我们其实只需要判断两点即可:
- 任一路径上的黑色结点个数是否相等;
- 是否存在连续的两个红色结点。
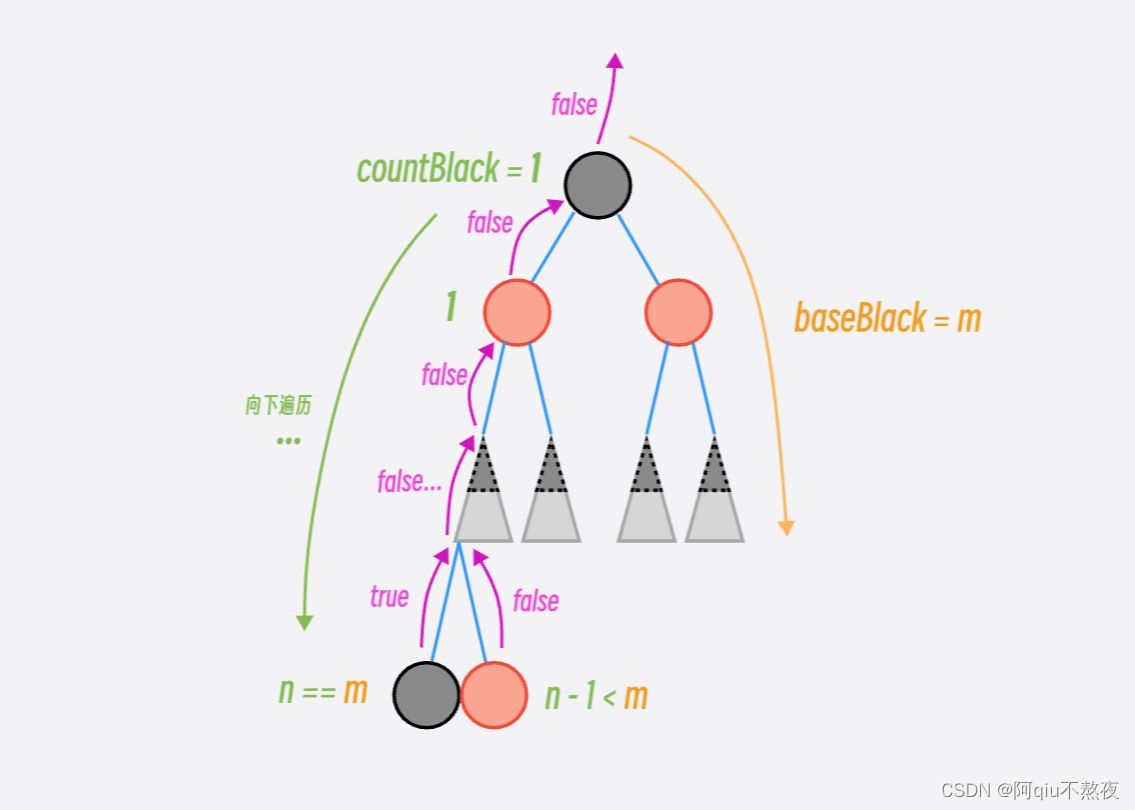
我们使用递归的方式来判断:
判断任一路径上的黑色结点个数是否相等时,必须要先计算某条路径上的黑色结点个数,可以通过 while循环计算最右侧一条路径上的黑色结点个数。将cur从_root开始一直向右子节点遍历即可,当cur为空时即该路径结束,终止循环。
然后使用checkColor函数(参数为当前结点指针Node*,计算中的当前路径黑色结点个数int,以及先前计算的最外层黑色结点个数int )递归计算每条路径上的黑色结点个数,顺便判断是否存在连续的红色结点。
在递归过程中:
当_root为空时,即当前路径已经结束,判断countBluck与baseBlack的值是否相等,若相等返回true,否则返回false;
若当前结点为红色,则判断其父结点是否为红色,是就返回false;
若当前结点为黑色,countBluck加1,并继续向左右子结点递归,返回左子结点的结果&&右子结点的结果:
测试红黑树是否合格的代码这里就不赘述了,大家可以在参考源码部分查找。这里来展示一下测试结果:
namespace qqq
{
void testfunc()
{
const int N = 10000000;
vector<int> v;
v.reserve(N);
srand(time(0));
for (size_t i = 0; i < N; i++)
{
v.push_back(i);
}
RBTree<int, int> rbt;
for (auto e : v)
{
rbt.insert(make_pair(e, e));
cout << "insert:" << e << "->" << rbt.isRBTree() << endl;
}
cout << rbt.isRBTree() << endl;
}
}
int main()
{
qqq::testfunc();
return 0;
}
因为这段测试代码中,存在大量I/O,所以运行速度很慢,大家可以将cout注释掉,只打印最后的结果。
总结
到此,关于红黑树的知识就介绍完了
在接下来的文章中,将会对红黑树进行封装,即map与set,尽情期待哦
如果大家认为我对某一部分没有介绍清楚或者某一部分出了问题,欢迎大家在评论区提出
如果本文对你有帮助,希望一键三连哦
希望与大家共同进步哦