文章目录
- 前言
- 一、设计框图
- 二、PHY层基本传输协议
- 三、PHY_TX模块
- 3.1、模块接口
- 3.2、组帧状态机描述
- 3.3、数据大小端问题
- 3.4、字节对齐
- 四、PHY_RX模块
- 4.1、模块接口
- 4.2、大小端转换
- 4.3、起始位
- 4.4、结束位
- 4.5、axis数据流恢复
- 五、LFSR伪随机码
- 六、链路空闲时期处理
前言
上一篇内容当中我们已经将gt_module模块设计完成,本篇开始进行PHY收发模块设计
一、设计框图

二、PHY层基本传输协议


我们在设置IP核的时候设置过时钟纠正序列,同步码正是该序列,用来纠正时钟的累积误差,一般至少发送俩组同步码,即俩次BC50,BC就是K28.5。SOF则表示一帧数据的开始,EOF表示结束,空闲时期发送LFSR伪随机序列。
注:这里稍微区分一下逗号码和同步码,逗号码是用来指示当前串并转换的位置是否正确,同步码是用来纠正时钟误差。
三、PHY_TX模块
向上通过AXIS接口与用户连接,向下与gt_module模块连接。
3.1、模块接口
module PHY_Tx(
input i_clk ,
input i_rst ,
input [31:0] i_tx_axis_data ,
input [3 :0] i_tx_axis_keep ,
input i_tx_axis_valid ,
input i_tx_axis_last ,
output o_tx_axis_ready ,
input i_gt_tx_done ,
output [31:0] o_gt_tx_data ,
output [3 :0] o_gt_tx_char
);
3.2、组帧状态机描述
状态机按照数据格式进行跳转,分别进行填充同步码,起始位、数据、结束位,以及在空闲时期插入同步码。
always @(*)begin
case (r_cur_state)
P_ST_INIT : r_nxt_state = i_gt_tx_done ? P_ST_IDLE : P_ST_INIT;
P_ST_IDLE : r_nxt_state = ri_tx_axis_valid_1d ? P_ST_COMMA :
r_st_cnt == P_INSERT_LEN ? P_ST_INSERT : P_ST_IDLE;
P_ST_COMMA : r_nxt_state = P_ST_SOF;
P_ST_SOF : r_nxt_state = P_ST_DATA;
P_ST_DATA : r_nxt_state = !i_tx_axis_valid && (r_st_cnt == r_tx_data_len - 3) ? P_ST_EOF :P_ST_DATA ;
P_ST_EOF : r_nxt_state = ri_tx_axis_keep >= 4'b1110 ? P_ST_EOF2 : P_ST_IDLE;
P_ST_EOF2 : r_nxt_state = P_ST_IDLE;
P_ST_INSERT : r_nxt_state = ri_tx_axis_valid_1d ? P_ST_COMMA :
r_st_cnt == 1 ? P_ST_IDLE : P_ST_INSERT;
default : r_nxt_state = P_ST_INIT;
endcase
end
3.3、数据大小端问题
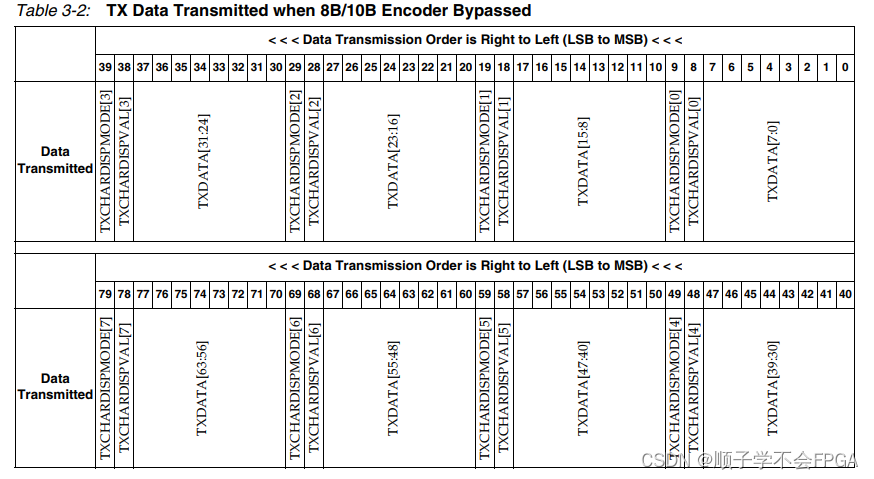
需要格外注意的一点是大小端问题,GT发送和接收是小端模式的,在组帧的时候我们按照习惯的大端模式进行组帧,只需要在输出时记得将数据字节顺序重排一下。
assign o_gt_tx_data = {ro_gt_tx_data[7:0],ro_gt_tx_data[15:8],ro_gt_tx_data[23:16],ro_gt_tx_data[31:24]};
assign o_gt_tx_char = {ro_gt_tx_char[0],ro_gt_tx_char[1],ro_gt_tx_char[2],ro_gt_tx_char[3]};
3.4、字节对齐
用户输入的数据是4字节对齐的,尾端通过keep信号指示有效字节位,在进行组帧的时候,我们是在SOF位后紧接着填充数据字段,也就是说数据整体向后移了一个byte位,所以需要处理4字节对齐的问题,主要是根据用户数据尾端keep来处理SOF位置。
4字节对齐主要是通过打一拍来解决,SOF位置的处理则需要根据用户数据keep信号的情况进行讨论。
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)begin
ro_gt_tx_data <= 'd0;
ro_gt_tx_char <= 'd0;
end
else if(r_cur_state == P_ST_COMMA)begin
// ro_gt_tx_data <= 32'h50BC50BC;
ro_gt_tx_data <= 32'hbc50bc50;
ro_gt_tx_char <= 4'b1010;
end
else if(r_cur_state == P_ST_SOF)begin
ro_gt_tx_data <= {8'hFB,w_fifo_dout[31:8]};
ro_gt_tx_char <= 4'b1000;
end
else if(r_cur_state == P_ST_DATA)begin
ro_gt_tx_data <= {r_fifo_dout[7:0],w_fifo_dout[31:8]};
ro_gt_tx_char <= 4'b0000;
end
else if(r_cur_state == P_ST_EOF && ri_tx_axis_keep == 4'b1000)begin
ro_gt_tx_data <= {r_fifo_dout[7:0],w_fifo_dout[31:24],8'hfd,w_lfsr_data[31:24]};
ro_gt_tx_char <= 4'b0010;
end
else if(r_cur_state == P_ST_EOF && ri_tx_axis_keep == 4'b1100)begin
ro_gt_tx_data <= {r_fifo_dout[7:0],w_fifo_dout[31:16],8'hfd};
ro_gt_tx_char <= 4'b0001;
end
else if(r_cur_state == P_ST_EOF && ri_tx_axis_keep == 4'b1110)begin
ro_gt_tx_data <= {r_fifo_dout[7:0],w_fifo_dout[31:8]};
ro_gt_tx_char <= 4'b0000;
end
else if(r_cur_state == P_ST_EOF && ri_tx_axis_keep == 4'b1111)begin
ro_gt_tx_data <= {r_fifo_dout[7:0],w_fifo_dout[31:8]};
ro_gt_tx_char <= 4'b0000;
end
else if(r_cur_state == P_ST_EOF2 && ri_tx_axis_keep == 4'b1110)begin
ro_gt_tx_data <= {8'hfd,w_lfsr_data[31:8]};
ro_gt_tx_char <= 4'b1000;
end
else if(r_cur_state == P_ST_EOF2 && ri_tx_axis_keep == 4'b1111)begin
ro_gt_tx_data <= {r_fifo_dout[7:0],8'hfd,w_lfsr_data[31:16]};
ro_gt_tx_char <= 4'b0100;
end
else if(r_cur_state == P_ST_INSERT)begin
ro_gt_tx_data <= {16'hbc50,16'hbc50};
ro_gt_tx_char <= 4'b0101;
end
else begin
ro_gt_tx_data <= w_lfsr_data;
ro_gt_tx_char <= 4'b0000;
end
end
四、PHY_RX模块
4.1、模块接口
module PHY_Rx(
input i_clk ,
input i_rst ,
output [31:0] o_rx_axis_data ,
output [3 :0] o_rx_axis_keep ,
output o_rx_axis_valid ,
output o_rx_axis_last ,
input i_rx_axis_ready ,
input i_rx_ByteAlign ,
input [31:0] i_gt_rx_data ,
input [3 :0] i_gt_rx_char
);
4.2、大小端转换
assign w_gt_rx_data = {i_gt_rx_data[7:0],i_gt_rx_data[15:8],i_gt_rx_data[23:16],i_gt_rx_data[31:24]};
assign w_gt_rx_char = {i_gt_rx_char[0],i_gt_rx_char[1],i_gt_rx_char[2],i_gt_rx_char[3]};
将接收数据先进行大小端转换,然后就可以按照大端习惯进行处理,这个看个人情况吧,我只习惯大端模式
4.3、起始位
重点: 为什么我们需要讨论起始位SOF,这是因为GT接收只进行了字节对齐,也就是转换串行数据为并行数据时,每个8bit数据就是我们发送端发送的8bit数据,但这不意味着恢复出来的32bit数据也是对齐的,SOF可以出现在1拍数据(32bit,4byte)的4个byte当中的任何一个byte位置上。
r_comma_access 表示同步码被识别
r_sof表示起始码被识别
r_sof_local 用于指示起始码字节位置
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_comma_access <= 'd0;
else if((ri_gt_rx_data[15:0] == 16'hbc50) && (ri_gt_rx_char[1:0] == 2'b10) && (w_gt_rx_data[31:24] == 8'hfb) && (w_gt_rx_char[3] == 1'b1))
r_comma_access <= 'd1;
else if((ri_gt_rx_data[23:0] == 24'hbc50fb) && (ri_gt_rx_char[2:0] == 3'b101))
r_comma_access <= 'd1;
else if((ri_gt_rx_data[31:8] == 24'hbc50fb) && (ri_gt_rx_char[3:0] == 4'b1010))
r_comma_access <= 'd1;
else if((ri_gt_rx_data_1d[7:0] == 8'hbc) && (ri_gt_rx_char_1d[0] == 1'b1) && (ri_gt_rx_data[31:16] == 16'h50fb) && (ri_gt_rx_char[3:2] == 2'b01))
r_comma_access <= 'd1;
else
r_comma_access <= r_comma_access;
end
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_sof <= 'd0;
else if(r_comma_access && (ri_gt_rx_data_1d[31:24] == 8'hfb) && (ri_gt_rx_char_1d[3] == 1'b1))
r_sof <= 'd1;
else if(r_comma_access && (ri_gt_rx_data_1d[23:16] == 8'hfb) && (ri_gt_rx_char_1d[2] == 1'b1))
r_sof <= 'd1;
else if(r_comma_access && (ri_gt_rx_data_1d[15:8] == 8'hfb) && (ri_gt_rx_char_1d[1] == 1'b1))
r_sof <= 'd1;
else if(r_comma_access && (ri_gt_rx_data_1d[7:0] == 8'hfb) && (ri_gt_rx_char_1d[0] == 1'b1))
r_sof <= 'd1;
else
r_sof <= 'd0;
end
//1表示最高字节位置(从左到右)
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_sof_local <= 'd0;
else if(r_comma_access && (ri_gt_rx_data_1d[31:24] == 8'hfb) && (ri_gt_rx_char_1d[3] == 1'b1))
r_sof_local <= 'd1;
else if(r_comma_access && (ri_gt_rx_data_1d[23:16] == 8'hfb) && (ri_gt_rx_char_1d[2] == 1'b1))
r_sof_local <= 'd2;
else if(r_comma_access && (ri_gt_rx_data_1d[15:8] == 8'hfb) && (ri_gt_rx_char_1d[1] == 1'b1))
r_sof_local <= 'd3;
else if(r_comma_access && (ri_gt_rx_data_1d[7:0] == 8'hfb) && (ri_gt_rx_char_1d[0] == 1'b1))
r_sof_local <= 'd4;
else
r_sof_local <= r_sof_local;
end
4.4、结束位
结束位的字节位置我们也需要进行记录,以便进行keep信号的处理
r_eof 表示结束位被识别
r_eof_1f :r_eof的前一拍数据
r_eof_2f :r_eof的前俩拍数据
r_eof_local :用于指示结束码字节位置
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_eof <= 'd0;
else if(r_comma_access && (ri_gt_rx_data_1d[31:24] == 8'hfd) && (ri_gt_rx_char_1d[3] == 1'b1))
r_eof <= 'd1;
else if(r_comma_access && (ri_gt_rx_data_1d[23:16] == 8'hfd) && (ri_gt_rx_char_1d[2] == 1'b1))
r_eof <= 'd1;
else if(r_comma_access && (ri_gt_rx_data_1d[15:8] == 8'hfd) && (ri_gt_rx_char_1d[1] == 1'b1))
r_eof <= 'd1;
else if(r_comma_access && (ri_gt_rx_data_1d[7:0] == 8'hfd) && (ri_gt_rx_char_1d[0] == 1'b1))
r_eof <= 'd1;
else
r_eof <= 'd0;
end
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_eof_1f <= 'd0;
else if(r_comma_access && (ri_gt_rx_data[31:24] == 8'hfd) && (ri_gt_rx_char[3] == 1'b1))
r_eof_1f <= 'd1;
else if(r_comma_access && (ri_gt_rx_data[23:16] == 8'hfd) && (ri_gt_rx_char[2] == 1'b1))
r_eof_1f <= 'd1;
else if(r_comma_access && (ri_gt_rx_data[15:8] == 8'hfd) && (ri_gt_rx_char[1] == 1'b1))
r_eof_1f <= 'd1;
else if(r_comma_access && (ri_gt_rx_data[7:0] == 8'hfd) && (ri_gt_rx_char[0] == 1'b1))
r_eof_1f <= 'd1;
else
r_eof_1f <= 'd0;
end
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_eof_2f <= 'd0;
else if(r_comma_access && (w_gt_rx_data[31:24] == 8'hfd) && (w_gt_rx_char[3] == 1'b1))
r_eof_2f <= 'd1;
else if(r_comma_access && (w_gt_rx_data[23:16] == 8'hfd) && (w_gt_rx_char[2] == 1'b1))
r_eof_2f <= 'd1;
else if(r_comma_access && (w_gt_rx_data[15:8] == 8'hfd) && (w_gt_rx_char[1] == 1'b1))
r_eof_2f <= 'd1;
else if(r_comma_access && (w_gt_rx_data[7:0] == 8'hfd) && (w_gt_rx_char[0] == 1'b1))
r_eof_2f <= 'd1;
else
r_eof_2f <= 'd0;
end
//1表示最高字节位置(从左到右)
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_eof_local <= 'd0;
else if(r_comma_access && (w_gt_rx_data[31:24] == 8'hfd) && (w_gt_rx_char[3] == 1'b1))
r_eof_local <= 'd1;
else if(r_comma_access && (w_gt_rx_data[23:16] == 8'hfd) && (w_gt_rx_char[2] == 1'b1))
r_eof_local <= 'd2;
else if(r_comma_access && (w_gt_rx_data[15:8] == 8'hfd) && (w_gt_rx_char[1] == 1'b1))
r_eof_local <= 'd3;
else if(r_comma_access && (w_gt_rx_data[7:0] == 8'hfd) && (w_gt_rx_char[0] == 1'b1))
r_eof_local <= 'd4;
else
r_eof_local <= r_eof_local;
end
4.5、axis数据流恢复
进行数据恢复的时候需要根据起始码位置来处理4字节对齐问题,其中最困难的地方在于keep信号的恢复,它需要同时考虑起始码和结束码的问题 ,这里大家可以根据代码认真思考一下,主要是根据起始码位置和结束码位置,对4‘b1111进行移位来恢复最后一帧数据的keep信号。
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
ro_rx_axis_data <= 'd0;
else if((r_sof || r_run) && r_sof_local == 'd1)
ro_rx_axis_data <= {ri_gt_rx_data_2d[23:0],ri_gt_rx_data_1d[31:24]};
else if((r_sof || r_run) && r_sof_local == 'd2)
ro_rx_axis_data <= {ri_gt_rx_data_2d[15:0],ri_gt_rx_data_1d[31:16]};
else if((r_sof || r_run) && r_sof_local == 'd3)
ro_rx_axis_data <= {ri_gt_rx_data_2d[7:0],ri_gt_rx_data_1d[31:8]};
else if((r_sof || r_run) && r_sof_local == 'd4)
ro_rx_axis_data <= ri_gt_rx_data_1d;
else
ro_rx_axis_data <= ro_rx_axis_data;
end
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
ro_rx_axis_keep <= 'd0;
else if(ro_rx_axis_last)
ro_rx_axis_keep <= 'd0;
else if(r_eof_1f && (r_sof_local >= (r_eof_local - 1)))
ro_rx_axis_keep <= (4'hf << (r_sof_local + 1 - r_eof_local));
else if(r_eof && (r_sof_local < (r_eof_local - 1)))
ro_rx_axis_keep <= (4'hf << (4-(r_eof_local - 1 - r_sof_local)));
else if(r_sof || r_run)
ro_rx_axis_keep <= 4'hf;
else
ro_rx_axis_keep <= 'd0;
end
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
ro_rx_axis_valid <= 'd0;
else if(ro_rx_axis_last)
ro_rx_axis_valid <= 'd0;
else if(r_sof)
ro_rx_axis_valid <= 'd1;
else
ro_rx_axis_valid <= ro_rx_axis_valid;
end
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
ro_rx_axis_last <= 'd0;
else if(ro_rx_axis_last)
ro_rx_axis_last <= 'd0;
else if(r_eof_2f && (r_sof_local == 4 && r_eof_local == 1))
ro_rx_axis_last <= 'd1;
else if(r_eof_1f && (r_sof_local >= (r_eof_local - 1)))
ro_rx_axis_last <= 'd1;
else if(r_eof)
ro_rx_axis_last <= 'd1;
else
ro_rx_axis_last <= 'd0;
end
五、LFSR伪随机码
发送端空闲时期需要发送伪随机码来模拟信道的高斯噪声
module LFSR_gen#(
parameter P_LFSR_INIT = 16'hA076
)(
input i_clk ,
input i_rst ,
output [31:0] o_lfsr_data
);
reg [31:0] r_lfsr_data ;
reg [15:0] r_lfsr ;
wire [47:0] w_xor_run ;
assign w_xor_run[47:32] = r_lfsr;
assign o_lfsr_data = r_lfsr_data;
genvar i;
generate
for(i = 0 ; i < 32 ; i = i + 1)begin
assign w_xor_run[31 - i] = w_xor_run[47 - i]^w_xor_run[46 - i]^w_xor_run[45 - i]^w_xor_run[32 - i];
end
endgenerate
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_lfsr <= P_LFSR_INIT;
else
r_lfsr <= w_xor_run[15:0];
end
always @(posedge i_clk or posedge i_rst)begin
if(i_rst)
r_lfsr_data <= 'd0;
else
r_lfsr_data <= w_xor_run[31:0];
end
endmodule
六、链路空闲时期处理
在链路空闲时期需要发送伪随机码,并且定期插入同步码0xBC60。
在接收端XCLK时钟域需要跨到RXUSERCLK时钟域,虽然俩者是同频的,但细微的差别也会导致FIFO的上溢和下溢问题,都会是的接收数据出错,我们该如何修正读快写满或者是读慢写快的问题呢?
解决办法就是弹性(Elastic)buffer,这和8B10B编码也有关系,因为涉及到了K码,我们在传输数据的时候会先发送同步码,同步码当中存在K码,当FIFO快写满的时候,弹性buffer就将FIFO当中的K码删除掉一些,当快读空的时候,就在FIFO里插入一些K码。