ABoVE: Level-4 WRF-STILT Particle Trajectories for Circumpolar Receptors, 2016-2019
简介
文件修订日期:2021-12-07
数据集版本: 1
摘要
本数据集提供了 2016-2019 年期间天气研究和预报(WRF)随机时间倒拉格朗日传输(STILT)粒子轨迹文件,受体位于飞行路径沿线位置和北纬 45 度以上环极地区的各个固定观测点。粒子文件描述了粒子在 10 天时间内的逆向释放运动。粒子文件按平台类型(有些平台是合并的)分为不同的档案,并可根据随后的足迹场是在环极 0.5 度网格(低分辨率)还是在 0.5 度和 0.1 度网格(高分辨率)上生成的,分为低分辨率和高分辨率两种。这些平台包括固定地点的通量塔、由飞机上的可编程烧瓶包(PFP)收集的整个空气样本的实验室测量结果,以及美国宇航局轨道碳观测站-2 卫星的观测结果。只有当粒子对相应的足迹场有非零贡献时,这些粒子文件才会被稀释以保留粒子位置信息。这些粒子文件用于计算配套数据集中的足迹场。确定足迹场的粒子轨迹仅受 WRF 建模域外缘的限制。同样,配套的足迹文件也是在一个规则的经纬度网格上提供的。该数据集扩展了 "北极储层碳脆弱性实验(CARVE)"项目之前关于陆地表面温室气体排放的大气传输研究。特别是,低分辨率粒子文件的内容与 CARVE 数据集类似。
2017-2019 年轨道碳观测站-2(OCO-2 Lite,v9)的 17,261 个受体位置。每个受体位置都有一个单独的 NetCDF 文件。
北极-北方脆弱性实验(ABoVE)是美国国家航空航天局(NASA)陆地生态计划的一项实地活动,从 2015 年开始在阿拉斯加和加拿大西部进行,为期约 10 年。ABoVE 的研究将基于实地的过程级研究与机载和卫星传感器获得的地理空间数据产品联系起来,为提高分析和建模能力奠定了基础,这些能力是了解和预测北极和北方地区生态系统对气候变化的反应及其对社会的影响所必需的。
数据特征
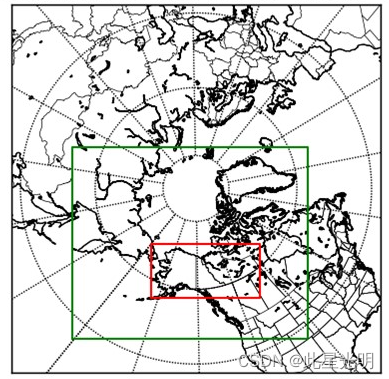
空间覆盖范围:北半球仅限于 WRF 域(图 2),包括整个 ABoVE 域
空间分辨率:点分辨率
时间覆盖范围:2016-07-24 至 2019-12-31
时间分辨率: 每小时
研究区域:所有经纬度均以十进制度表示。
| Site | Westernmost Longitude | Easternmost Longitude | Northernmost Latitude | Southernmost Latitude |
|---|---|---|---|---|
| Northern Hemisphere | -180 | 180 | 90 | 10 |
共有 350,028 个 netCDF (*.nc) 格式的数据文件,分装在 32 个 TAR/GZIP 档案中。每个文件都提供了 WRF-STILT 模拟对一个粒子受体位置在 10 天内的模拟粒子轨迹。
文件名为 stiltYYYxMMxDDxhhxmmxLATxLONxHEIGHT.nc,其中
YYYY = 观测年份、
MM = 观测月份、
DD = 观测日、
hh = 以 UTC 为单位的观测小时、
mm = 以 UTC 为单位的观测分钟、
LAT = 以十进制度表示的观测纬度、
LON = 以十进制度表示的观测点经度,以及
HEIGHT = 观测点离地面的高度,以米为单位。
例如,stilt2013x06x25x04x00x65.1330Nx147.4539Wx00003.nc 文件包含 2013 年 6 月 25 日 4:00 UTC 时的模拟粒子轨迹。受体观测点位于 65.1330N,127.4539W,距地面 3 米处。
粒子文件按平台类型归入档案(尽管有些平台是合并的),并根据配套数据集(Henderson 等人,2021 年)中环北极足迹场的分辨率分为 "低分辨率 "或 "高分辨率"。对于低分辨率文件,北纬 30 度以上的环极足迹场(变量名以 foot1 开头)是在 0.5 度网格上生成的。对于高分辨率文件,足迹场在 0.5 度和 0.1 度网格上生成(变量名分别以 foot1 和 foot2 开始)。除以 footnearfield1 开头的变量(仅出现在低分辨率文件中)外,所有足迹场变量都以小时时间分辨率覆盖环极地区(30N 至 90N,180E 至 180W)。
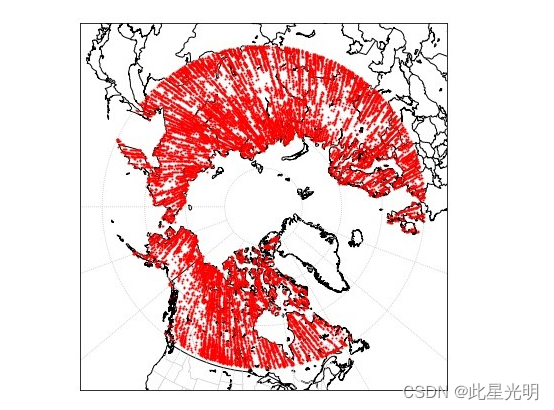
此外,还包括两个媒体(*.mp4)格式的配套文件,说明 500 个粒子在 10 天内汇聚到受体(观测)位置时的移动情况:69.6246N,162.3022E。动画展示了从两个时间点开始的模拟粒子轨迹:2015-04-24 0400 UTC 和 2015-10-15 0200 UTC。受 WRF 模型驱动的气象条件以及随机因素的影响,粒子轨迹是通过模拟从受体的时间和位置向后移动来估算的。当模拟粒子在全球移动时,其路径会在地球表面留下一个 "足迹"(即一个二维场),该 "足迹 "与位于行星边界下半部的粒子数量成正比;因此,假定该 "足迹 "会累积来自地球表面的通量。由此产生的足迹场显示了 10 天模拟期间粒子对受体位置的累积贡献。WRF-STILT 的足迹显示了影响受体测量到的温室气体浓度的上风区域。更多信息,请参阅 Henderson 等人(2015 年)。
表 1.包含数据文件的 32 个 TAR/GZIP 存档的名称和说明。OCO 受体一栏表示受体数据是否从轨道碳观测站-2(OCO-2 Lite,v9)收集。对于非 OCO 平台,"PFP "指的是飞机上的可编程烧瓶包(Programmable Flask Packages),从列出的站点出发,其余平台是收集温室气体原位样本的固定站点。
| File Name | Number of netCDF Files | Spatial Resolution | OCO Receptor | Platform & Date |
|---|---|---|---|---|
| ACG_2017_insitu-particles.tar.gz | 14,320 | low | no | Alaska Coast Guard, in situ measurements, 2017 |
| ACG_2017_PFP-particles.tar.gz | 99 | low | no | Alaska Coast Guard, PFP measurements, 2017 |
| ArcticCAP_2017_insitu-particles.tar.gz | 45,450 | low | no | Arctic Carbon Aircraft Profiles, in situ measurements, 2017 |
| ArcticCAP_2017_PFP-particles.tar.gz | 331 | low | no | Arctic Carbon Aircraft Profiles, PFP measurements, 2017 |
| ASCENDS_2017_insitu-particles.tar.gz | 12,845 | high | no | Ascends/ABoVE 2017 Airborne Campaign, PFP measurements, 2017 |
| ATom2_2017_insitu-particles.tar.gz | 5667 | high | no | Atmospheric Tomography Mission (ATom), in situ measurements, January-February 2017 |
| ATom2_2017-2019-PFP-particles.tar.gz | 59 | high | no | Atmospheric Tomography Mission (ATom), PFP measurements, January- February 2017 |
| ATom3_2017_insitu-particles.tar.gz | 5598 | low | no | Atmospheric Tomography Mission (ATom), in situ measurements, September-October 2017 |
| ATom3_2018_PFP-particles.tar.gz | 31 | low | no | Atmospheric Tomography Mission (ATom), PFP measurements, September-October 2018 |
| ATom4_2017-2019_PFP-particles.tar.gz | 43 | high | no | Atmospheric Tomography Mission (ATom), PFP measurements, 2017-2019 |
| ATom4_2018_insitu-particles.tar.gz | 6011 | high | no | Atmospheric Tomography Mission (ATom), in situ measurements, April-May 2018 |
| BRW_2017-2019_PFP-particles.tar.gz | 349 | high | no | Barrow Atmospheric Baseline Observatory, PFP measurements, 2017-2019 |
| CBA_2017-2019_PFP-particles.tar.gz | 306 | high | no | Cold Bay Alaska, PFP measurements, 2017-2019 |
| EC-BRW-CRV_insitu-particles.tar.gz | 9844 | high | no | Environment Canada + Barrow Atmospheric Baseline Observatory + Carbon in Arctic Reservoirs Vulnerability Experiment, 2019 |
| ECCC_2019-particles.tar.gz | 2000 | high | no | Environment and Climate Change Canada, 2017-2019 |
| ESP_2017-2019_PFP-particles.tar.gz | 765 | high | no | Estevan Point British Columbia, PFP measurements, 2017-2019 |
| ETL_2017-2019_PFP-particles.tar.gz | 420 | high | no | East Trout Lake Saskatchewan, PFP measurements, 2017-2019 |
| LEF_2017-2019_PFP-particles.tar.gz | 717 | high | no | Park Falls Wisconsin, PFP measurements, 2017-2019 |
| NSA-7800_2016-particles.tar.gz | 7800 | low | no | Modeled using v391 terrain heights, North Slope of Alaska-7800, 2016 |
| NSA-7802_2016-particles.tar.gz | 7802 | low | no | Modeled using v351 terrain heights, North Slope of Alaska-7802, 2016 |
| OCO2-201700-d01-particles.tar.gz | 22,061 | high | yes | WRF model domain d01, January-April and August-December 2017 |
| OCO2-201700-d02-particles.tar.gz | 23,075 | high | yes | WRF model domain d02, January-May and August-December 2017 |
| OCO2-201700-d03-particles.tar.gz | 10,153 | high | yes | WRF model domain d03, January-May and August-December 2017 |
| OCO2-201705-d01-particles.tar.gz | 22,230 | high | yes | WRF model domain d01, May 2017 |
| OCO2-201706-d01-particles.tar.gz | 25,675 | high | yes | WRF model domain d01, June 2017 |
| OCO2-201706-d02-particles.tar.gz | 35,217 | high | yes | WRF model domain d02, June 2017 |
| OCO2-201706-d03-particles.tar.gz | 12,675 | high | yes | WRF model domain d03, June 2017 |
| OCO2-201707-d01-particles.tar.gz | 29,926 | high | yes | WRF model domain d01, July 2017 |
| OCO2-201707-d02-particles.tar.gz | 35061 | high | yes | WRF model domain d02, July 2017 |
| OCO2-201707-d03-particles.tar.gz | 12,428 | high | yes | WRF model domain d03, July 2017 |
| OCO2-2018-particles.tar.gz | 572 | high | yes | OCO-2, 2018 |
| PFA_2017-2019_PFP-particles.tar.gz | 498 | high | no | Poker Flat Alaska, PFP measurements, 2017-2019 |
数据文件
| Variable | Units | Description |
|---|---|---|
| All Particle Files | ||
| checkbasic | various | Basic output from Trajeccheck() |
| checkbasicnames | char | Names for checkbasic 1D array |
| checksum | various | Checksum array |
| checksumdate | days since 2000-01-01 00:00:00 UTC | Checksum date |
| checksumnames | char | Column names for checksum array |
| endpts | various | STILT particle location array thinned to retain rows containing trajectory endpts |
| endptsdate | days since 2000-01-01 00:00:00 UTC | End points date |
| endptsnames | char | Column names for particle array ‘endpts’ |
| ident | char | Identifier string |
| nchar | 1 | Numeric identifier |
| origagl | meters | Original receptor height above ground before rounding for STILT |
| origlat | degrees_north | Original receptor latitude |
| origlon | degrees_east | Original receptor longitude |
| origutctime | UTC time | Original receptor time |
| origutctimeformat | char | Format string for original receptor time |
| part3d | various | STILT particle location array thinned to retain rows approximately every so many hours. See variable names in part3dnames. |
| part3ddate | days since 2000-01-01 00:00:00 UTC | Date of part3d |
| part3dnames | char | Column names for particle array ‘part3d’ |
| partfoot | various | STILT particle location array thinned to retain rows where foot > 0 |
| partfootdate | days since 2000-01-01 00:00:00 UTC | Date of partfoot |
| partfootnames | char | Column names for particle array ‘partfoot’ |
| Low-Resolution Files Only | ||
| foot1 | ppm per (μmol m-2 s-1) | Gridded STILT footprint in time, latitude, longitude at 0.5 degree resolution |
| foot1date | days since 2000-01-01 00:00:00 UTC | Date of foot1 |
| foot1hr | hours | Hours back from STILT start time encoded in the filename |
| foot1lat | degrees_north | Degrees latitude of center of grid cells |
| foot1lon | degrees_east | Degrees longitude of center of grid cells |
| footnearfield1 | ppm per (μmol m-2 s-1) | Gridded STILT footprint at 0.1 degree resolution near receptor location |
| footnearfield1date | days since 2000-01-01 00:00:00 UTC | Date for footnearfield1 |
| footnearfield1hr | hours | Hours back from STILT start time for footnearfield1 |
| footnearfield1lat | degrees_north | Degrees latitude of center of grid cells |
| footnearfield1lon | degrees_east | Degrees longitude of center of grid cells |
应用和推导
WRF-STILT 粒子文件和足迹与化学物种无关,但它们支持利用机载和塔式观测对 CO2 和 CH4 地表-大气通量进行精确估算。基于 WRF-STILT 基底的极地植被光合作用和呼吸作用模型(PolarVPRM;Luus 和 Lin,2015 年)模拟的二氧化碳摩尔分数与塔观测数据显示出很强的一致性,表明 WRF-STILT 模型很好地代表了该地区的气象学(Karion 等人,2016 年)。该数据集扩展了之前 CARVE 项目(Miller 和 Dinardo,2012 年)关于温室气体陆面排放的大气传输研究。
质量评估
初步分析表明,WRF 输出结果与质量受控的地表和无线电探空仪观测结果总体上一致。采用类似程序对 CARVE 的 STILT 基底进行的分析表明,季节变化逼真,与塔观测数据吻合良好,表明 WRF-STILT 基底质量较高,支持利用 CARVE 观测数据对 CO2 和 CH4 地表-大气通量进行准确估算(Henderson 等,2015 年)。
数据获取、材料和方法
该项目试图利用 WRF-STILT 耦合模型来模拟陆面排放的温室气体在大气中的移动。在随机时间倒拉格朗日传输(STILT)模型(Lin 等人,2003 年)中,飞机样本和通量塔位置的定位数据被视为受体。大气运动由气象和研究预测(WRF)模型(Skamarock 和 Klemp,2008 年)中的气象场驱动。WRF 模式的配置是为了在北极、阿拉斯加北部和加拿大西北部生成高质量、高分辨率的气象场。为本项目运行的 WRF 模式紧跟 Nehrkorn 等人(2018 年)的模式配置。Henderson 等人(2015 年)对 WRF-STILT 建模框架进行了更广泛的描述。
STILT 是一个拉格朗日粒子扩散模型,从一个测量地点("受体 "地点)开始逆时针应用,以 "足迹 "场的形式创建传输模型的临界点(Nehrkorn 等人,2010 年;Henderson 等人,2015 年)。足迹的单位是混合比(ppm CO2;ppb CH4)/(μmol m-2 s-1),它量化了上风地表通量对受体测量浓度的影响,计算方法是计算受地表影响体积内的粒子数量和在该体积内停留的时间。由此得出的足迹是一个网格产品,它说明了在模拟的时间步骤中,对特定地点、高度和时间测量到的粒子浓度有影响的区域。
与配套数据集(Henderson 等,2021 年)中低分辨率足迹文件(即以英尺开头的 netCDF 文件)相对应的粒子轨迹文件(即以高跷开头的 netCDF 文件)包含足迹字段的副本。对于高分辨率文件,0.1 度的足迹字段较大,不包含在这些粒子文件中。低分辨率粒子文件的内容与 CARVE 数据集(CARVE 科学团队,2017 年)类似,包括 CARVE 时代的 0.5 度足迹。
代码
!pip install leafmap
!pip install pandas
!pip install folium
!pip install matplotlib
!pip install mapclassify
import pandas as pd
import leafmap
url = "https://github.com/opengeos/NASA-Earth-Data/raw/main/nasa_earth_data.tsv"
df = pd.read_csv(url, sep="\t")
df
leafmap.nasa_data_login()
results, gdf = leafmap.nasa_data_search(
short_name="ABoVE_ASCENDS_XCO2_2050",
cloud_hosted=True,
bounding_box=(-180.0, 10.0, 180.0, 90.0),
temporal=("2016-07-24", "2019-12-31"),
count=-1, # use -1 to return all datasets
return_gdf=True,
)
gdf.explore()
#leafmap.nasa_data_download(results[:5], out_dir="data")引用
Henderson, J.M., J. Eluszkiewicz, M.E. Mountain, T. Nehrkorn, R.Y.-W. Chang, A. Karion, J.B. Miller, C. Sweeney, N. Steiner, S.C. Wofsy, and C.E. Miller. 2015. Atmospheric transport simulations in support of the Carbon in Arctic Reservoirs Vulnerability Experiment (CARVE). Atmospheric Chemistry and Physics 15:4093-4116. ACP - Atmospheric transport simulations in support of the Carbon in Arctic Reservoirs Vulnerability Experiment (CARVE)
网址推荐
0代码在线构建地图应用
https://sso.mapmost.com/#/login?source_inviter=nClSZANO
机器学习
https://www.cbedai.net/xg