汽车K总线与CAN的区别是什么
1、功能不同
K线一般用于检测系统,属单线模式,与诊断仪器连接并相互传递数据。CAN线主要用于控制单元与控制单元之间传递数据、属双线模式,分高位线和地位线。
2、通讯速度不同
K线通讯速率较低,最大波特率仅为10400bps;CAN总线最大波特率可达1Mbps。 优点是传输速率高,抗干扰能力强。
3、使用方法不同
K线诊断应用程序开发者必须亲自管理数据传输过程中的字节间定时,并处理底层通讯错误。CAN数据帧以整帧报文的形式进行发送,应用程序开发者不必管理字节间定时,并且CAN总线物理层和数据链路层具备完善的错误检测和错误恢复机制,应用程序不必监视和处理底层通讯错误。
国产CAN线 DP2515替代MCP2515简介
DP2515是一款带有 SPI 接口的独立 CAN 控制器,因为是独立CAN控制器,可简化需要与CAN总线连接的应用。完全支持 CAN V2.0B 技术规范。
特性
• 完全支持 CAN V2.0B 技术规范,通讯速率为1 Mb/s:
- 0-8 字节长的数据字段
- 标准和扩展数据帧及远程帧
• 接收缓冲器、验收屏蔽寄存器和验收滤波寄存器: - 两个接收缓冲器,可优先存储报文
- 六个 29 位验收滤波寄存器
- 二个 29 位验收屏蔽寄存器
• 对头两个数据字节进行滤波(针对标准数据帧)
• 三个发送缓冲器,具有优先级设定及发送中止功能
• 高速 SPI 接口 (10 MHz): - 支持 0,0 和 1,1 的 SPI 模式
• 单触发模式确保报文发送只尝试一次
• 带有可编程预分频器的时钟输出引脚: - 可用作其他器件的时钟源
• 可用起始帧信号(Start-of-Frame,SOF),用于监控 SOF 信号: - 可用于时隙协议和/或总线诊断以检测早期总线性能退化
• 带有可选使能设定的中断输出引脚
• “缓冲器满”输出引脚可配置为: - 各接收缓冲器的中断引脚
- 通用数字输出引脚
• “请求发送 (Request-to-Send, RTS)”输入引脚可各自配置为: - 各发送缓冲器的控制引脚,用于请求立即发送报文
- 通用数字输入引脚
• 低功耗的 CMOS 技术: - 工作电压范围 2.7V 至 5.5V
- 5 mA 典型工作电流
- 1 µA 典型待机电流 (休眠模式)
• 工作温度范围:- 温 度 (℃):-40°C 至 +85°C
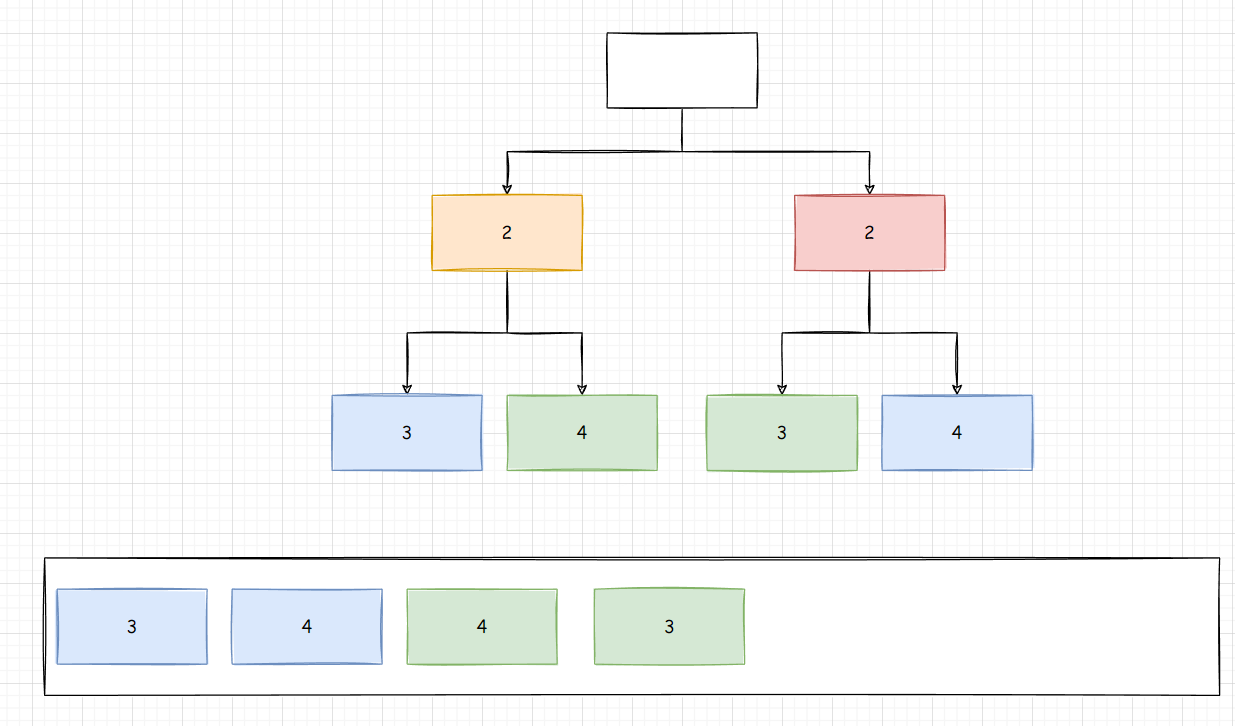
典型系统实现方法图

###引脚布置