FPGA和ARM数据交互是ZYNQ系统中非常重要的内容。PS提供了供FPGA读写的AXI-HP接口用于两者的高速通信和数据交互。一般的,我们会采用AXI DMA的方式去传输数据,DMA代码基本是是C编写,对于FPGA开发者来说不利于维护和debug。本文提供一种手写AXI_MASTER接口用于PL 向DDR指定位置写入数据并验证读写是否正确。
本项目的思路是:PS通过GPIO发起写DDR的命令ps_start(高脉冲),FPGA在收到ps_start后,开始写数据到DDR,写完后通过IRQ中断通知ARM写入完成,ARM按顺序读DDR数据并通过UART输出读出的结果,arm读完后清除中断并发起下一次的写脉冲,循环写读。本项目代码稍作修改可以为FPGA数据采集+ARM算法处理系统提供参考。
开发板为Zynq UltraScale+ xczu2cg-sfvc784-1-i
ILA 采样AXI_master读时序

uart 输出的DDR读出数据,对比写入是一致的。

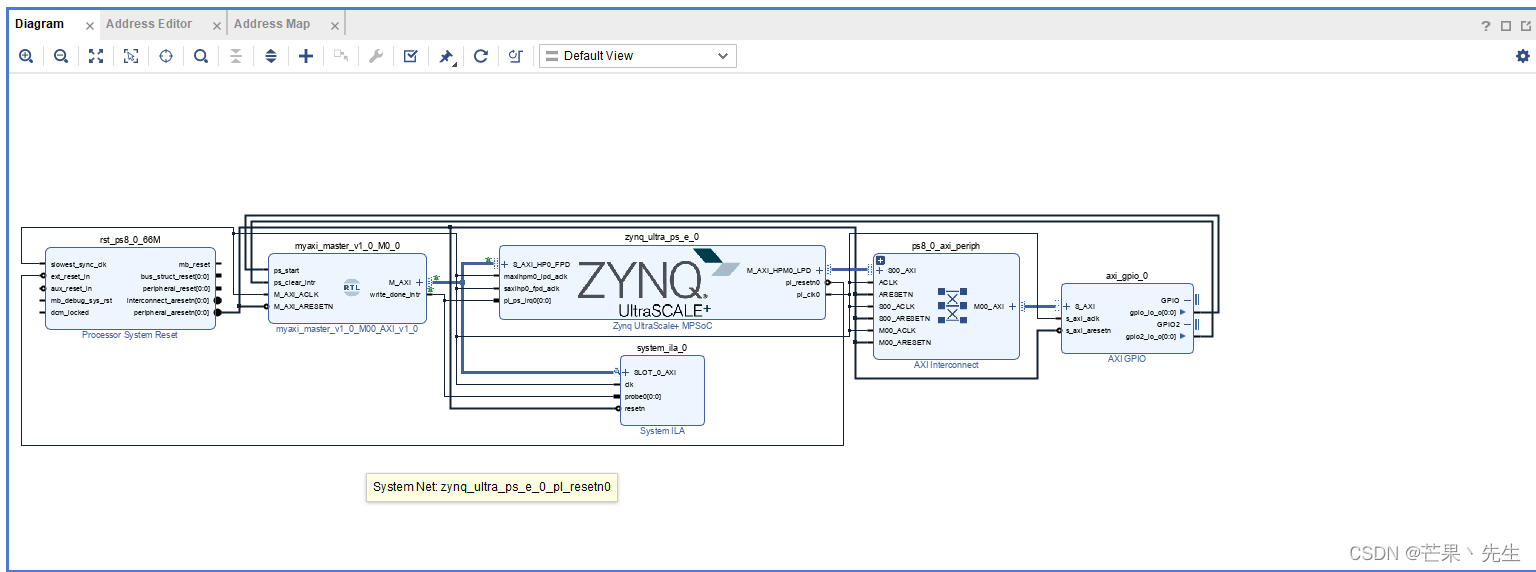
vivado block design 参考设计 注意DDR是64位DDR。
vitis 工程代码如下 需要注意 刷新CACHE后再读 不然cache和DDR数据可能不一致。
/******************************************************************************
*
* Copyright (C) 2009 - 2014 Xilinx, Inc. All rights reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* Use of the Software is limited solely to applications:
* (a) running on a Xilinx device, or
* (b) that interact with a Xilinx device through a bus or interconnect.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL
* XILINX BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF
* OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE.
*
* Except as contained in this notice, the name of the Xilinx shall not be used
* in advertising or otherwise to promote the sale, use or other dealings in
* this Software without prior written authorization from Xilinx.
*
******************************************************************************/
/*
* helloworld.c: simple test application
*
* This application configures UART 16550 to baud rate 9600.
* PS7 UART (Zynq) is not initialized by this application, since
* bootrom/bsp configures it to baud rate 115200
*
* ------------------------------------------------
* | UART TYPE BAUD RATE |
* ------------------------------------------------
* uartns550 9600
* uartlite Configurable only in HW design
* ps7_uart 115200 (configured by bootrom/bsp)
*/
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xgpio.h"
#include "xparameters.h"
#include "xscugic.h"
#include "xil_cache.h"
#define INTC_DEVICE_ID XPAR_SCUGIC_0_DEVICE_ID
#define INTC_DEVICE_INT_ID XPAR_FABRIC_MYAXI_MASTER_V1_0_M0_0_WRITE_DONE_INTR_INTR
#define BASE_ADDR_FOR_DDR 0x00001000
#define DATA_COUNT (64)
XScuGic InterruptController;
XScuGic_Config *GicConfig;
XGpio Gpio;
u32 intr_recv;
u32 *data_array=(u32*)BASE_ADDR_FOR_DDR;
void myHandler(void *CallbackRef);
int main()
{
intr_recv =0;
init_platform();
int Status;
/* Initialize the GPIO driver */
Status = XGpio_Initialize(&Gpio, XPAR_GPIO_0_DEVICE_ID);
if (Status != XST_SUCCESS) {
xil_printf("Gpio Initialization Failed\r\n");
return XST_FAILURE;
}
XGpio_DiscreteWrite(&Gpio, 1, 0);
XGpio_DiscreteWrite(&Gpio, 2, 0);
//GIC
GicConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);
if (NULL == GicConfig) {
return XST_FAILURE;
}
Status = XScuGic_CfgInitialize(&InterruptController, GicConfig,
GicConfig->CpuBaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/*
* Perform a self-test to ensure that the hardware was built
* correctly
*/
Status = XScuGic_SelfTest(&InterruptController);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/*
* Connect the interrupt controller interrupt handler to the hardware
* interrupt handling logic in the ARM processor.
*/
/*
* Connect a device driver handler that will be called when an
* interrupt for the device occurs, the device driver handler performs
* the specific interrupt processing for the device
*/
Status = XScuGic_Connect(&InterruptController, INTC_DEVICE_INT_ID,
(Xil_ExceptionHandler)myHandler,
(void *)&InterruptController);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
Xil_ExceptionInit();
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler) XScuGic_InterruptHandler,
&InterruptController);
/*
* Enable interrupts in the ARM
*/
Xil_ExceptionEnable();
XScuGic_SetPriorityTriggerType(&InterruptController,INTC_DEVICE_INT_ID,0x3A,0x3);
XScuGic_Enable(&InterruptController, INTC_DEVICE_INT_ID);
u32 index;
while(1){
XGpio_DiscreteWrite(&Gpio, 1, 1); //start write
if(1 == intr_recv){ //recev fpga intr
XGpio_DiscreteWrite(&Gpio, 1, 0); //start write clear
Xil_DCacheFlushRange((u32)data_array,DATA_COUNT);
for(index = 0;index <DATA_COUNT;index++)
{
xil_printf("index = %d,value = %d\r\n",index,*(data_array+index));
}
XGpio_DiscreteWrite(&Gpio, 2, 1);
intr_recv =0;
// break;
}
}
cleanup_platform();
return 0;
}
void myHandler(void *CallbackRef)
{
/*
* Indicate the interrupt has been processed using a shared variable
*/
intr_recv = 1;
xil_printf("intr occurs\r\n");
}
项目源代码地址:
fpga通过aximaster读写PS侧DDR的仿真和上板测试资源-CSDN文库