智能车主控板原理图原理讲解
综述:本篇文章对智能车主控板的一部分电路进行原理分析,文末附加整体原理图。
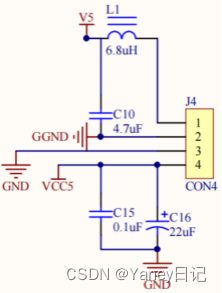
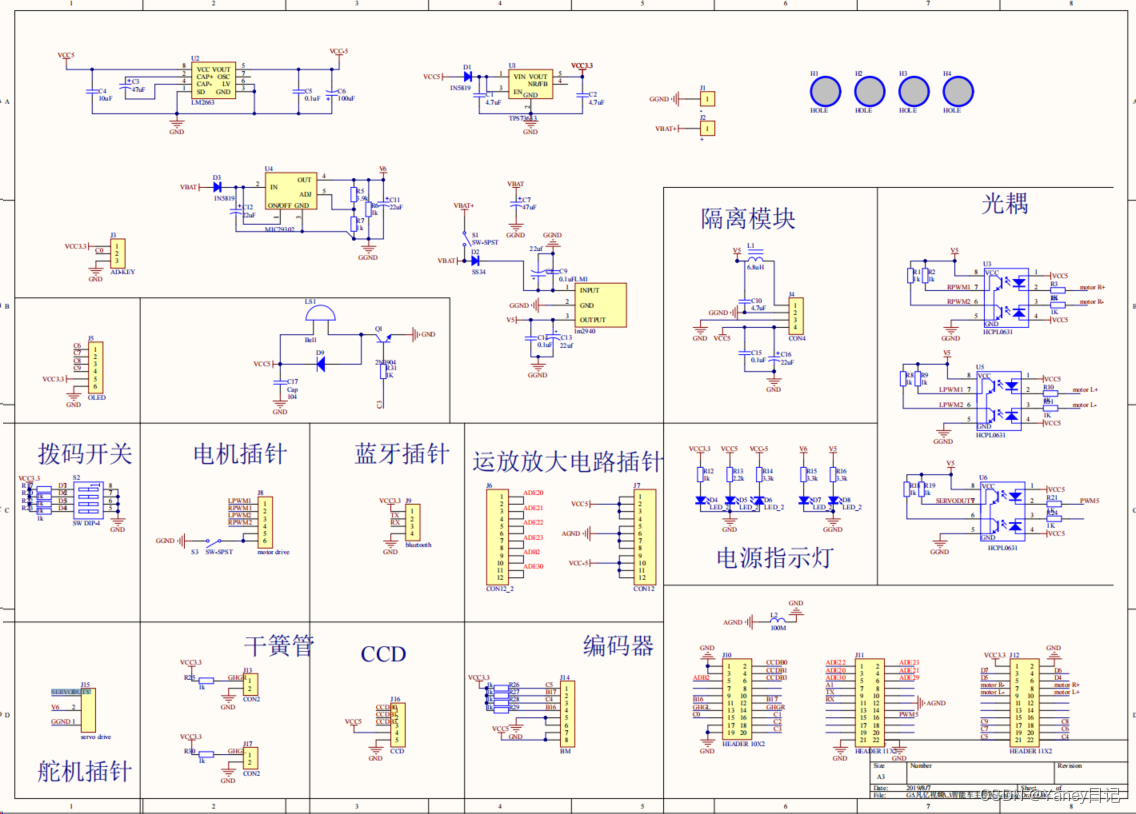
1. 电源电路
(1)通过外接电池供电并通过电源模块电路,运用稳压芯片lm2940,将电源电压转化为5V。电源输入端口运用运用一个开关,用来打开、关闭电源。

(2)通过不同的电源模块,转化为需要的不同电源。
稳压芯片lm2663,5V转-5V;稳压芯片MIC29302,VBAT转6V;稳压芯片TPS73633,5V转3.3V。(也就是整个原理图中有四个电源电路。)

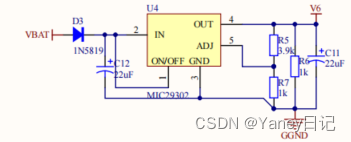
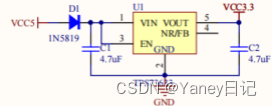
注意:输出端一定要有电容,否则会导致输出电压不准确!
2. 隔离电路
GND是电路中的参考地,用于建立电路中其他信号的基准。GGND则是一种特殊的接地技术,用于防止信号干扰和提高电路的灵敏度。用隔离模块电路隔离模拟地和数字地。模拟地和数字地分开摆放。
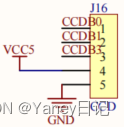
3. CCD电路
在智能车主控板原理图中的CCD是指Charge Coupled Device(电荷耦合器件)。CCD是一种图像传感器,它可以将光信号转换为电信号。在智能车中,CCD一般用于视觉系统中的图像采集,通过感光元件和信号处理电路,将光信号转换为数字信号,实现对环境和道路的识别和检测。
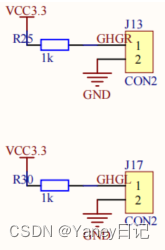
4. 干簧管电路
干簧管是一种电磁开关元件,由玻璃管、麦克斯韦线圈和干簧管组成。它的作用是通过外部电磁场的作用,控制干簧管内部的磁性材料的导通或断开,以实现电路的开关功能。
干簧管,是磁性开关,有磁通,无磁断,是由两个间距极小的金属片封装而成的,平时是不导通的,在智能车里可以检查终点停车(停车检测)。
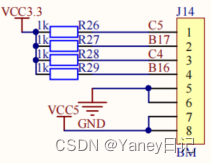
5. 编码器电路
编码器在智能车里是用来测电机转数的传感器(读取电机速度和控制电机)原理:通过编码器内部的光电传感器或磁敏感元件,感知电机转子的位置和运动状态,从而得到电机的角度和速度信息。编码器输出的脉冲信号经过信号处理电路后,可以用来计算电机的旋转速度,并通过控制算法控制电机的转速。
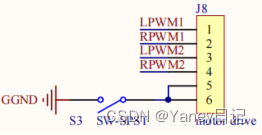
6. 拨码开关电路
拨码开关电路用来控制不同信号,一般摆放在靠近右手,方便操作。

7. 电源指示灯电路

8. 光耦电路
光耦可以理解为一个光电开关,但是它与普通的光电开关有一些不同。光耦是由发光二极管和光敏晶体管(或光电三极管)组成的,通过光敏元件的光照产生电信号,实现输入与输出的电气隔离。光耦能够将输入端和输出端进行电隔离,保护输入信号源不受输出端的干扰,同时也能实现电平的转换和传输。

9. 电机电路
32单片机通过光耦驱动5线4相步进电机的原理:将步进电机的控制信号输入到光耦的驱动端口,通过光电耦合的原理,将输入信号与输出信号进行电气隔离,保护单片机不受电机的电磁干扰,同时实现电信号的转换和隔离。电机的控制信号可以通过单片机的IO口来实现。
10. 舵机电路
智能车中的舵机控制原理:通过控制舵机的PWM信号,控制舵机的转动角度。舵机内部有一组电动机和位置反馈装置,通过控制电机的转动,使舵机的输出轴转动到期望的位置。PWM信号的占空比决定了舵机的转动角度,通过改变PWM信号的占空比,可以控制舵机的转动位置。

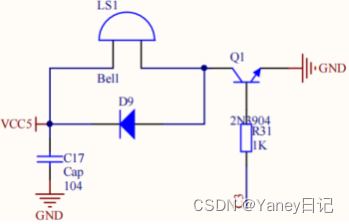
11. 蜂鸣器电路
12. 整体原理图
本篇文章借鉴的是B站凡忆教育的四层板绘制视频,侵权联系删除!