目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
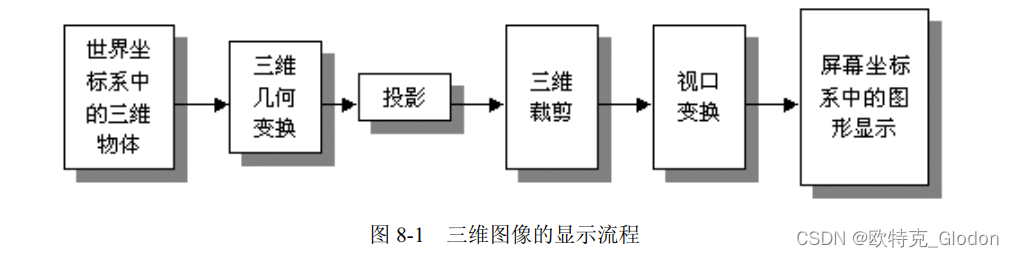
4.系统原理简介
5.完整工程文件
1.课题概述
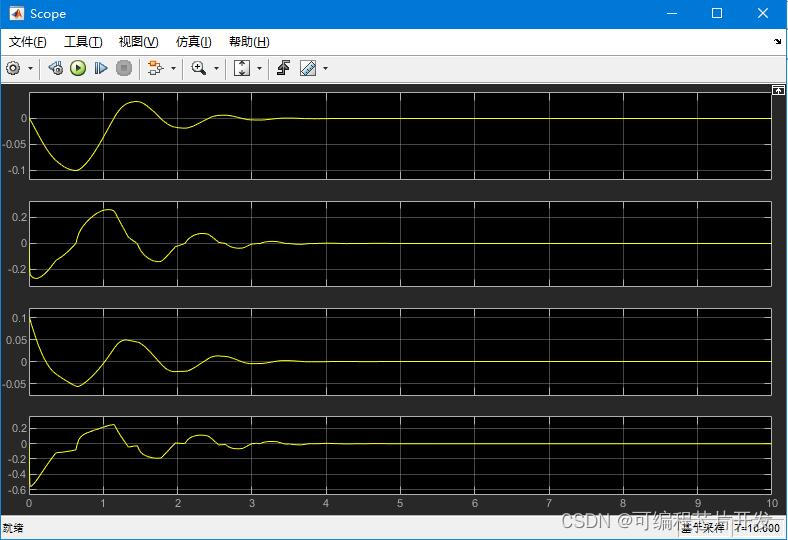
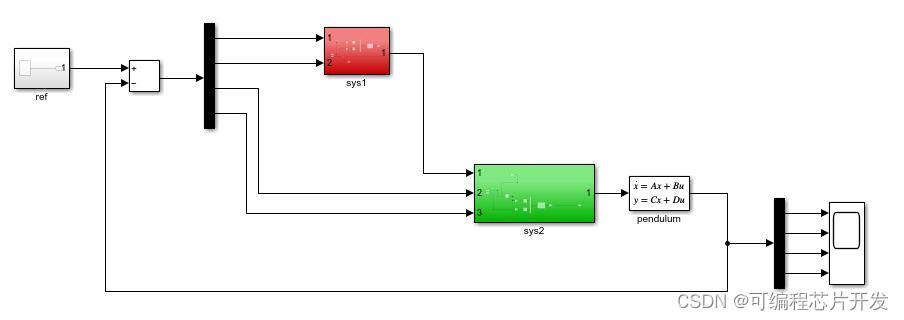
对倒立摆模型进行模糊控制器simulink建模,利用倒立摆的摆角角度与小车的位置来控制小车的推力,控制了倒立摆的摆角问题,使得小车最终停在稳定的位置。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
41
4.系统原理简介
倒立摆控制系统是一种经典的非线性控制系统,其目标是在没有外界支撑的情况下保持一端固定的杆处于竖直位置平衡。系统状态变量主要包括摆杆的角度(θ)及其角速度(ω)。采用模糊控制策略,主要是为了能够处理这种高度非线性的系统,并且具有良好的鲁棒性和自适应性。
倒立摆的动力学模型可以由牛顿-欧拉方程得出,一般形式如下:

各个变量含义如下:
| M | 小车质量 |
| m | 摆杆质量 |
| b | 小车摩擦系数 |
| l | 摆杆长度 |
| I | 摆杆惯量 |
| F | 加在小车上的力 |
| x | 小车的位置 |
| φ | 摆杆与垂直向上方向的夹角 |
| θ | 摆杆与垂直向上方向的夹角(初始位置为竖直向下) |
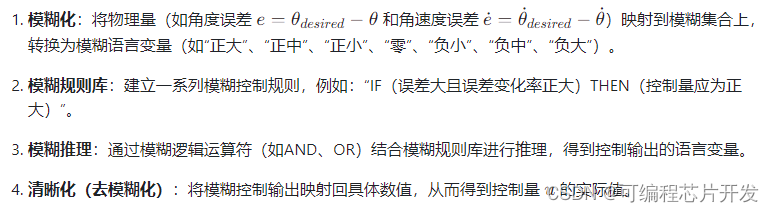
模糊控制原理 模糊控制的核心思想是模仿人类模糊推理的过程,将精确的数学模型转化为语言变量描述的问题,再通过模糊逻辑控制器(FLC)产生控制动作。
5.完整工程文件
v