论文标题: Semantic-Enhanced Representation Learning for Road Networks with Temporal Dynamics
作者: Yile Chen(陈亦乐) ; Xiucheng Li(李修成); Gao Cong(丛高) ; Zhifeng Bao(鲍芝峰) ; Cheng Long(龙程)
机构:南洋理工大学(NTU),哈尔滨工业大学(深圳),皇家墨尔本理工大学(RMIT)
论文链接:https://arxiv.org/abs/2403.11495
Cool Paper:https://papers.cool/arxiv/2403.11495
TL;DR:本文提出了一个名为Toast的框架及其增强版DyToast,用于学习路网的语义增强表示,并通过结合时间动态来提升时间敏感任务的性能。
关键词:路网表示学习,轨迹预训练,自监督学习
🌟【紧跟前沿】“时空探索之旅”与你一起探索时空奥秘!🚀
欢迎大家关注时空探索之旅
摘要
在这项研究中,引入了一种名为 Toast 的新颖框架,用于学习路网的通用表示,以及其改进模型 DyToast,旨在增强时间动态的集成,以提高各种时间敏感下游任务的性能。 具体来说,提出对路网固有的两个关键语义特征进行编码:交通模式和行驶语义。 为了实现这一目标,通过合并旨在预测与目标路段相关的交通环境的辅助目标来完善skip-gram模块。 此外,利用轨迹数据并基于 Transformer 设计预训练策略来提取路网上的行驶语义。进一步, DyToast 通过采用以其有益特性为特征的统一三角函数,进一步增强了该框架,从而能够更有效地捕获路网的时间演变和动态性质。 通过这些提出的技术,可以获得对路网中知识的多方面进行编码的表示,适用于基于路段的应用和基于轨迹的应用。 对三个任务中的两个现实世界数据集进行的广泛实验表明,提出的框架始终明显优于最先进的基线。
Q: 这篇论文试图解决什么问题?
A: 这篇论文提出了一个名为Toast的新颖框架及其高级版本DyToast,旨在通过增强对时间动态的整合来有效学习路网的通用表示。具体来说,该研究试图解决以下问题:
- 路网表示学习中的两个主要问题:与常见图假设不一致的偏差(discrepancies)和路网特征的同质性(feature uniformity)。这些问题限制了现有图表示学习方法在路网中的应用效果。
- 路网任务中的时间敏感性问题。许多路网任务,如交通速度预测和旅行时间估计,具有明显的动态特性,这些特性随时间变化而变化。现有的路网表示学习方法通常只学习静态表示,无法有效捕捉这些动态特征。
- 为了解决上述问题,论文提出了Toast框架,它包含两个模块:一个交通增强的skip-gram模块和一个基于轨迹数据的Transformer模块。这些模块通过自监督学习目标直接编码交通模式和旅行语义,无需额外的任务特定标签。
- 为了进一步捕捉时间动态,DyToast在Toast的基础上引入了统一的三角函数时间编码技术,使得模型能够更有效地捕捉路网的时间演变和动态特性。
总体而言,论文的目标是学习能够编码路网多方面知识(包括交通模式和旅行语义)的通用表示,这些表示不仅适用于基于道路段的应用程序,也适用于基于轨迹的应用程序,并且对时间敏感的任务具有更好的适用性。
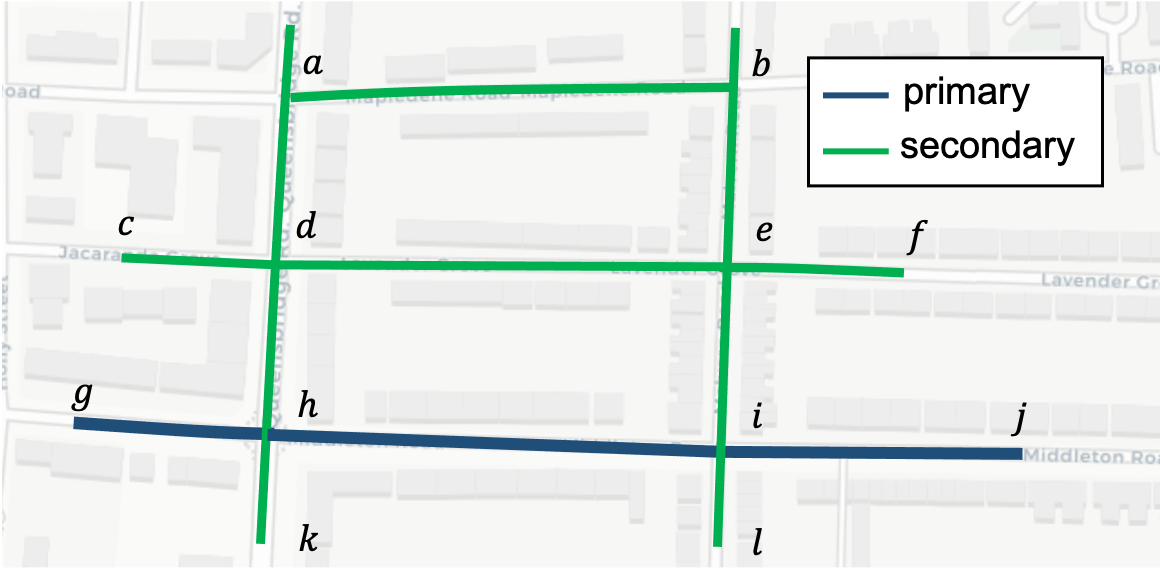
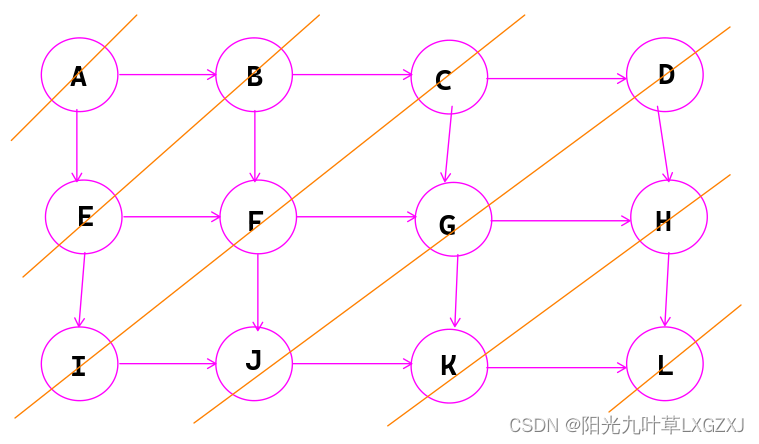
- 例如 d h , g h , h i , h k dh, gh,hi,hk dh,gh,hi,hk是一个十字路口,但是道路等级不同,**交通模式(Traffic pattern)**不同。
- 差异(discrepancies)和特征均匀性(feature uniformity):虽然路段de与其邻居共享特征,但由于其定位在直接路线(direct route)(路径[c、d、e、f])上,而不是绕道路线(detour)(路径[c、d、a、e、f]),它也比路段(cd、ad、ab、ab)具有更高的交通量。
Q: 有哪些相关研究?
A: 这篇论文中提到的相关研究主要分为以下几个类别:
- 路网表示学习 (Road Networks):
- 研究如何从路网中学习通用的表示,以便能够提升多种下游任务的效果,例如交通推断和预测、道路属性预测等。
- 轨迹分析和建模 (Trajectory Analysis and Modeling):
- 利用车辆在城市中的移动轨迹数据来提供对路网相关任务的补充见解,例如路线规划、异常检测和目的地预测。
- 图表示学习 (Graph Representation Learning):
- 采用随机游走策略(如Deepwalk和node2vec)或图卷积网络(GCN)和图注意力网络(GAT)来学习图结构的表示。
- 路网表示学习的方法:
- 专门针对路网的特性开发的方法,例如SRN2Vec、HRNR、RFN等,这些方法尝试捕捉路网的拓扑结构和空间信息。
- 基于轨迹数据的表示学习方法:
- 例如Toast、JCLRNT和TrajRNE,这些方法通过轨迹数据来提取路网中的旅行语义,并学习道路段和轨迹的表示。
- 时间动态的编码:
- 研究如何将时间动态整合到路网表示中,以适应交通速度随时间变化等动态特性。
这些相关研究为论文中提出的方法提供了理论和技术背景,并为比较和评估所提出方法的有效性提供了基准。
Q: 论文如何解决这个问题?
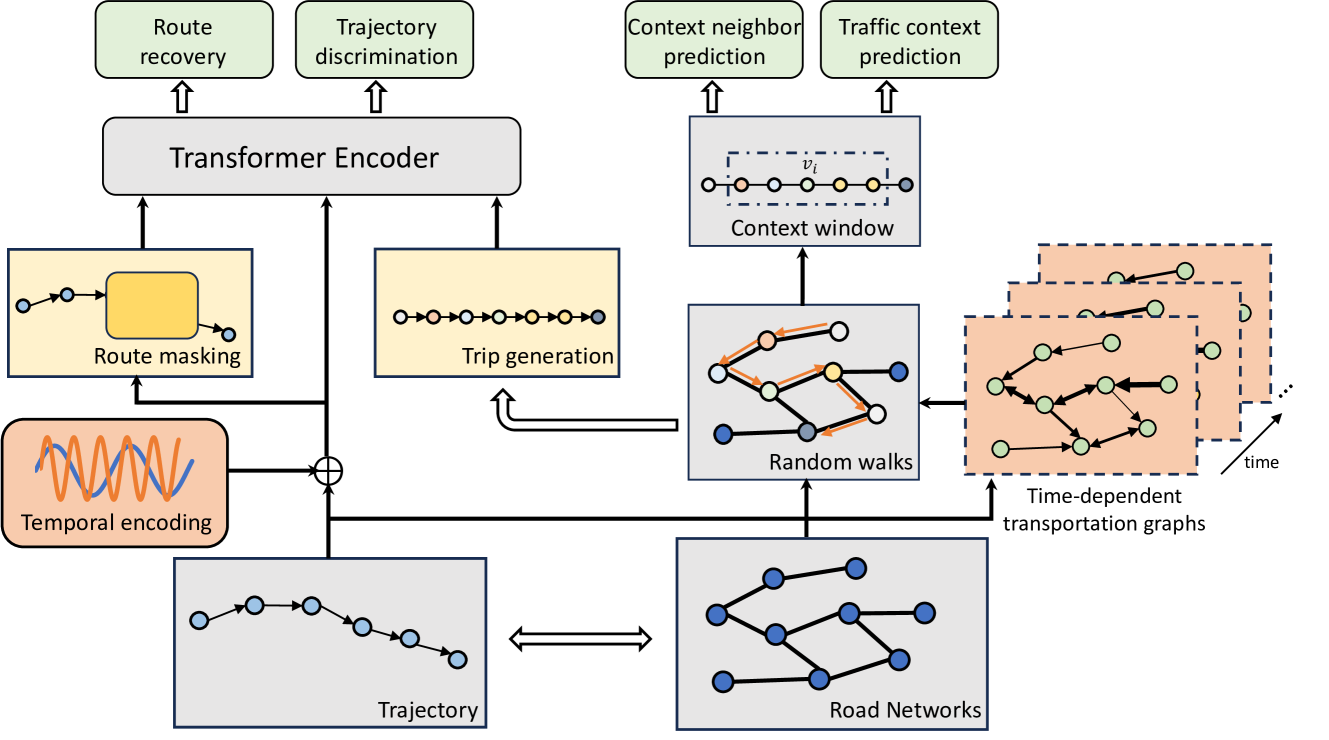
(橘)红色组件是针对时间动态的设计
A: 论文提出了一个名为Toast的框架以及其增强版DyToast,用以解决路网表示学习中的问题。具体解决方案如下:
- 交通增强的skip-gram模块:
- 通过扩展skip-gram模型,不仅预测目标道路段的上下文邻居,还预测与交通模式相关的上下文特征(例如道路类别和限速)。
- 采用二元交叉熵损失函数来预测目标道路段的交通上下文,并通过多任务学习范式优化道路段表示,使其能够编码图结构和交通模式。
- 基于轨迹数据的Transformer模块:
- 利用Transformer模型和两个新颖的预训练任务(路线恢复和轨迹判别)来提取轨迹数据中的旅行语义。
- 路线恢复任务通过随机遮蔽轨迹中的一段连续道路段,然后基于剩余路段恢复被遮蔽的部分。
- 轨迹判别任务旨在区分真实的轨迹和通过随机游走生成的假轨迹,以增强模型捕捉转换模式的能力。
- 时间动态编码技术:
- 通过使用统一的三角函数编码方法,将时间动态整合到表示学习中。
- 构建基于每个时间帧的转移频率的时间依赖型交通图,使用带参数化的正弦函数来模拟道路段在不同时间帧的表示。
- 在Transformer模块中,将正弦函数集成到自注意力机制中,以有效捕捉连续和不规则时间间隔的细粒度时间相关性。
- 实验验证:
- 在两个真实世界的数据集上进行广泛的实验,验证所提出框架的有效性。
- 在三个时间敏感的下游任务上(道路速度推断、旅行时间估计和目的地预测)进行测试,结果表明Toast和DyToast在各种任务中均优于现有的基准方法。
通过这些方法,论文成功地提出了一种能够捕捉路网中交通模式和旅行语义的通用表示学习方法,并且通过时间编码技术增强了表示的时间动态性,使其更适合时间敏感的下游应用。
Q: 论文做了哪些实验?


A: 论文中进行了一系列实验来验证所提出Toast和DyToast框架的有效性。具体实验内容如下:
- 数据集:
- 使用了两个城市(成都和西安)的路网和轨迹数据集,这些数据来自OpenStreetMap和滴滴出行公司。
- 比较方法:
- 与9种不同的基线方法进行比较,包括传统的图学习算法(如node2vec、GCN、GAT)、标准(standard)路网表示学习方法(如SRN2Vec、HRHR、RFN、SARN)、以及轨迹丰富(Trajectory-enriched)的表示学习方法(如TrajRNE、JCLRNT、Toast)。
- 下游任务:
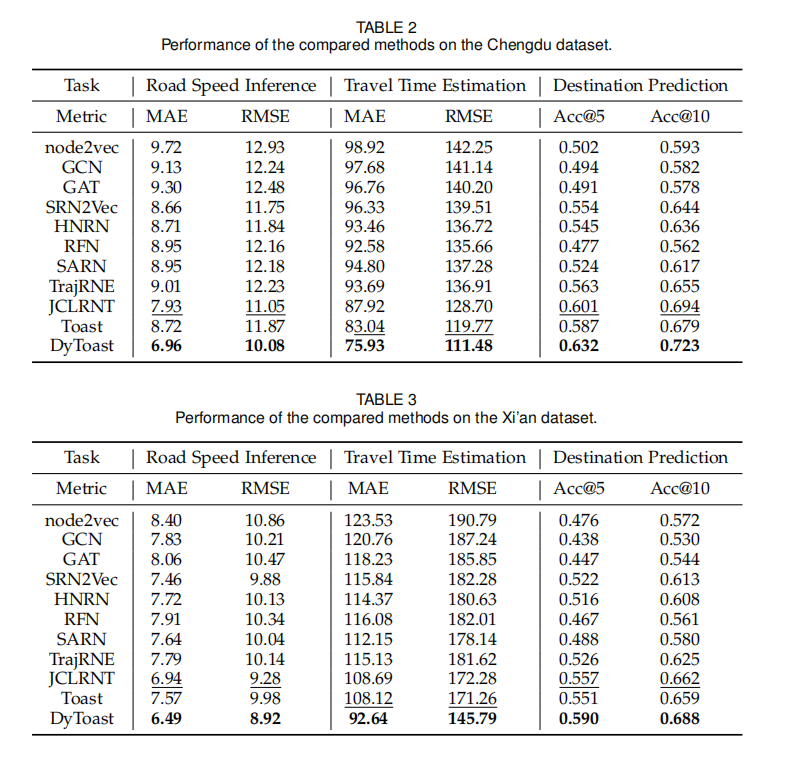
- 评估了模型在三个时间敏感的任务上的性能:道路速度推断、旅行时间估计和目的地预测。
- 对于道路速度推断任务,目标是预测在给定部分交通速度观测值的情况下所有道路段的动态交通速度。
- 对于旅行时间估计任务,目标是估计在不同时间帧开始的轨迹的旅行时间。
- 对于目的地预测任务,目标是预测在不同时间帧开始的轨迹的目的地道路段。
- 评估指标:
- 对于道路速度推断和旅行时间估计任务,使用平均绝对误差(MAE)和均方根误差(RMSE)作为评估指标。
- 对于目的地预测任务,使用Top-N准确率(Acc@N)作为评估指标。
- 实验设置:
- 对于所有比较方法,将道路段和轨迹的表示维度设置为128。
- 在Transformer预训练阶段,采用40%的遮蔽比率,设置Transformer的层数为2,头数为4,并进行30个训练周期的迭代。
- 对于基线方法,遵循各自论文中描述的默认配置。
- 性能比较:
- 展示了所有方法在成都和西安数据集上的三个任务的结果,并进行了分析。
- 模型分析:
- 进行了消融研究,移除了框架的不同组件来调查它们对性能的贡献。
- 比较了不同的时间编码技术在道路速度推断任务上的有效性。
- 研究了超参数(如嵌入大小、遮蔽比率和辅助损失权重)对模型性能的影响。
通过这些实验,论文证明了Toast和DyToast在捕捉路网的时间动态和提高时间敏感任务性能方面的优越性。


Q: 总结一下论文的主要内容
A: 这篇论文主要内容的总结如下:
- 问题定义:论文针对路网表示学习中存在的两个主要问题——图假设的不一致性(discrepancies)和特征同质性(feature uniformity),以及缺乏对时间动态的捕捉,提出了新的解决方案。
- 方法提出:
- Toast框架:一个新颖的框架,包含两个核心模块——交通增强的skip-gram模块和基于轨迹数据的Transformer模块,用于学习路网的通用表示。
- DyToast框架:Toast的增强版,通过引入统一的三角函数时间编码技术,能够捕捉路网的时间演变和动态特性。
- 技术细节:
- 交通增强的skip-gram模块:通过辅助目标预测交通上下文,编码交通模式到路网表示中。
- Transformer模块:利用预训练任务(路线恢复和轨迹判别)从轨迹数据中提取旅行语义。
- 时间动态编码:采用正弦函数对表示进行时间参数化,以整合时间信息并捕捉动态模式。
- 实验验证:
- 在两个真实世界的数据集上进行实验,包括成都和西安的路网和轨迹数据。
- 与多种基线方法进行比较,包括传统图学习方法和专门针对路网的方法。
- 在三个时间敏感的下游任务上评估模型性能:道路速度推断、旅行时间估计和目的地预测。
- 结果分析:
- DyToast在所有任务中均优于现有的基准方法,证明了其在捕捉时间动态方面的优势。
- 消融研究和超参数影响分析进一步验证了所提出技术的有效性。
- 贡献总结:
- 提出了一个能够学习路网通用表示的新框架,该框架能够整合交通模式和旅行语义,并增强对时间动态的捕捉。
st在所有任务中均优于现有的基准方法,证明了其在捕捉时间动态方面的优势。 - 消融研究和超参数影响分析进一步验证了所提出技术的有效性。
- 提出了一个能够学习路网通用表示的新框架,该框架能够整合交通模式和旅行语义,并增强对时间动态的捕捉。
- 贡献总结:
- 提出了一个能够学习路网通用表示的新框架,该框架能够整合交通模式和旅行语义,并增强对时间动态的捕捉。
- 在真实世界数据集上的广泛实验表明,所提出的方法在多种时间敏感的下游任务中均能取得显著的性能提升。
🌟【紧跟前沿】“时空探索之旅”与你一起探索时空奥秘!🚀
欢迎大家关注时空探索之旅