这个比想象中要难,而且需要自己写。
1.相机可以转xy两个位置,可以点头和转圈。注意这里有一个if判断(后面返回来发现了这些问题)
2.角色不能点头,只能转圈。

难得是移动方向,因为移动方向(位置)和转向是相关联的。
3.先做相机的移动,相机除了和角色做同向的水平转动,还要以角色为锚点做圆弧运动。

3.1移到背后,z应该是负值,这东西再着急也没用,最好的办法就是一步一步做。

对应调整
![]() 调整结果,满足要求
调整结果,满足要求
3.2当角色和相机发生“转圈”时(绕y轴旋转),相机要已角色为轴做圆弧运动。也就是要把-4这个距离分到x轴和z轴上。
确实是转了,但是转的速度是不一样的,调整转动角度用的是y角度的差值,而不是y角度的数值。
把scene调成下边这样,也可以很快发现问题,现在是擦着背后和相机初始位置做圆周运动。
不加距离的时候确,相机和角色确实是同朝向的,相机的朝向没问题,相机的问题有问题!不过有了俯视图这种思维问题很快应该就能解决了。
如下代码后,相机确实绕着小人做圆周运动了,但转速太快了。
mainCamera.transform.position = model.transform.position + new Vector3(-4 * Mathf.Sin(mainCamera.transform.eulerAngles.y)+0, 0, -4 * Mathf.Cos(mainCamera.transform.eulerAngles.y));应该是把角度和弧度给弄混了!改成弧度以后确实是同速度了
mainCamera.transform.position = model.transform.position + new Vector3(-4 * Mathf.Sin(mainCamera.transform.eulerAngles.y/180*2*Mathf.PI)+0, 0, -4 * Mathf.Cos(mainCamera.transform.eulerAngles.y / 180 * 2 * Mathf.PI));但是相机的旋转角度有问题,并不是一直朝向小人背后!
是 /360*2Π,修改后终于达成预期效果!
mainCamera.transform.position = model.transform.position + new Vector3(-4 * Mathf.Sin(mainCamera.transform.eulerAngles.y/360*2*Mathf.PI)+0, 0, -4 * Mathf.Cos(mainCamera.transform.eulerAngles.y / 360 * 2 * Mathf.PI));
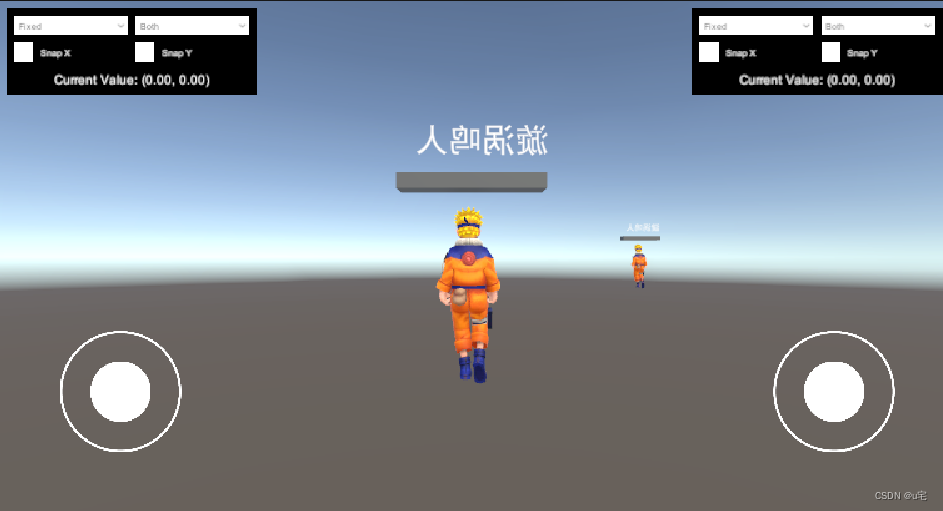
4.角色移动
现在存在的问题是:角色的移动是按照坐标轴的绝对方向为基准进行移动的,我需要的是按照当前朝向进行相对移动。
当前的角色移动代码如下:
Vector3 direction = (Vector3.forward * vector3.Vertical + Vector3.right * vector3.Horizontal)* speed * Time.fixedDeltaTime;
在两句之间来一个向量旋转即可,问题不大,绕着y轴转

结果非常成功
5.角色控制器的整体代码如下:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class JoystickPlayerExample : MonoBehaviour
{
public static float speed;//这个可以在unity中赋值的
public static float rotationSpeed;
public VariableJoystick vector3;
public VariableJoystick quaternion4;
public Rigidbody rb;
public static GameObject model;//这个需要赋值,在登录过程中只赋值本地玩家自身
public static Camera mainCamera;
public void FixedUpdate()
{
//Debug.Log(variableJoystick.Vertical);
//Debug.Log(variableJoystick.Horizontal);
//计算方向差 正负以后再说
Vector3 direction = (Vector3.forward * vector3.Vertical + Vector3.right * vector3.Horizontal)* speed * Time.fixedDeltaTime;
//direction = (Vector3.forward * quaternion4.Vertical + Vector3.right * quaternion4.Horizontal) * speed * Time.fixedDeltaTime;
//rb.AddForce(direction * speed * Time.fixedDeltaTime, ForceMode.VelocityChange);//重力体不满足条件
direction = Quaternion.Euler(0, mainCamera.transform.eulerAngles.y, 0)* direction;//绕着y轴转--这里的前后顺序不能颠倒
//1.模型位置
model.transform.position = model.transform.position + direction;
//model.transform.rotation = model.transform.rotation + rotation;
//Debug.Log(model.GetInstanceID());
//Debug.Log(model.transform.position);
//实测是一直刷新的,所以我觉得相机写在这里也是可以的
//一个模型一个相对相机位置的参数
//2.相机位置--需要做到背后朝向
//mainCamera.transform.position = model.transform.position+ new Vector3(0, 1.5f,-4);//其实就是maincamera,
//mainCamera.transform.position = model.transform.position + new Vector3(-4 * Mathf.Cos(mainCamera.transform.eulerAngles.y), 1.5f, -4 * Mathf.Sin(mainCamera.transform.eulerAngles.y));
//mainCamera.transform.position = model.transform.position + new Vector3(0,0,-4);
mainCamera.transform.position = model.transform.position + new Vector3(-4 * Mathf.Sin(mainCamera.transform.eulerAngles.y/360*2*Mathf.PI)+0, 0, -4 * Mathf.Cos(mainCamera.transform.eulerAngles.y / 360 * 2 * Mathf.PI));//-4 分到 x轴和z轴上
//mainCamera.transform.position = model.transform.position;
//从这里开始是旋转
// 获取用户的输入轴(例如:鼠标移动)
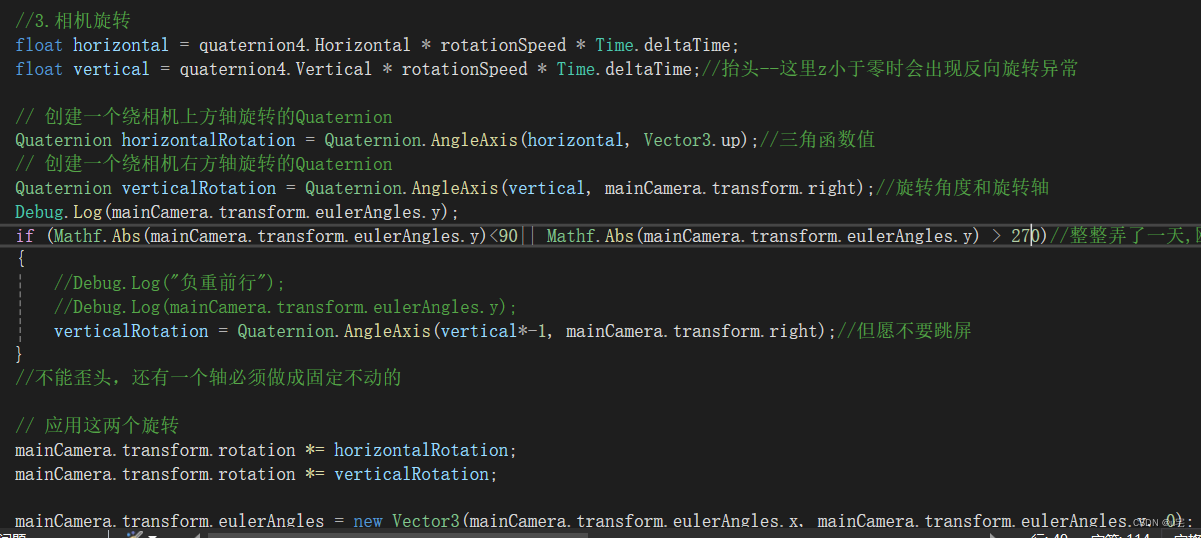
//3.相机旋转
float horizontal = quaternion4.Horizontal * rotationSpeed * Time.deltaTime;
float vertical = quaternion4.Vertical * rotationSpeed * Time.deltaTime;//抬头--这里z小于零时会出现反向旋转异常
// 创建一个绕相机上方轴旋转的Quaternion
Quaternion horizontalRotation = Quaternion.AngleAxis(horizontal, Vector3.up);//三角函数值
// 创建一个绕相机右方轴旋转的Quaternion
Quaternion verticalRotation = Quaternion.AngleAxis(vertical, mainCamera.transform.right);//旋转角度和旋转轴
Debug.Log(mainCamera.transform.eulerAngles.y);
if (Mathf.Abs(mainCamera.transform.eulerAngles.y)<90|| Mathf.Abs(mainCamera.transform.eulerAngles.y) > 270)//整整弄了一天,欧拉角判定,rotation是弧度
{
//Debug.Log("负重前行");
//Debug.Log(mainCamera.transform.eulerAngles.y);
verticalRotation = Quaternion.AngleAxis(vertical*-1, mainCamera.transform.right);//但愿不要跳屏
}
//不能歪头,还有一个轴必须做成固定不动的
// 应用这两个旋转
mainCamera.transform.rotation *= horizontalRotation;
mainCamera.transform.rotation *= verticalRotation;
mainCamera.transform.eulerAngles = new Vector3(mainCamera.transform.eulerAngles.x, mainCamera.transform.eulerAngles.y, 0);
//Debug.Log(mainCamera.transform.rotation);//实测,
//水平拖拽是第二个位置(三角函数值0-1),竖直拖拽是第一个位置,
//第三个位置最好是0,第四个位置最好是1
//模型同时设置水平旋转--unity脚本这么看来还是很方便的
//model.transform.eulerAngles= new Vector3(mainCamera.transform.eulerAngles.x, mainCamera.transform.eulerAngles.y, 0);
//4.模型旋转(ok)
model.transform.eulerAngles = new Vector3(0, mainCamera.transform.eulerAngles.y, 0);//脑袋单独做,无所谓 磕头 转圈 歪脑袋
}
}