过去十年中,地理空间革命在采集硬件、处理软件和云技术方面取得了重大进展。 新用户发现地理空间技术越来越容易使用。 随着数据可用性(新获取的数据或开放公共档案)的增加,沟通结果的需求也随之增加。 2D(或 2.5D)不再是唯一的选择。 3D 可视化已成为锦上添花,它创造了检查和分析复杂数据集的新颖方法,以及用于向利益相关者展示结果、协作、推广和出版的有吸引力的输出。
洪水测绘和模拟、BIM、城市建模、数字孪生和自然资源是需要可视化的主要领域的例子,尽管与地理空间世界的其他地方一样,应用程序的数量确实多种多样。 因此,当前的可视化是由用户需求和行业对其潜力的日益认识所驱动的。
1、最前沿的发展
自 20 世纪 80 年代以来,3D 图形技术一直受到人们的关注。 随着 20 世纪 90 年代 OpenGL、Direct3D 和场景图等的发展,以及 2000 年代可编程着色管道的引入,工程师能够利用台式 PC 上日益强大的图形处理单元 (GPU) 来可视化大型复杂的 3D 模型。 最近,基于浏览器的图形(通过 WebGL)、游戏引擎(例如 Unity 和 Unreal)以及新一代图形应用程序编程接口 (API)(例如 Vulkan、Metal 和 WebGPU)为行业提供了新的机遇和路线图 可视化是产品和服务的中心。
尽管取得了这些进步,3D 地理空间可视化历来都以临时或定制解决方案为特征,这些解决方案是针对特定应用需求而开发的,成本很高。 虽然许多供应商现在提供用于通过摄影测量或激光雷达生成 3D 模型的软件,但应用增值的下一步仍然是一个挑战。
2、数据和标准
许多 3D 可视化应用中的空间数据通常是点云(XYZ 点坐标,可选地具有颜色或反射率等属性;图 1)或网格(XYZ 顶点、三角形连接性和可选的表面法线、颜色或材质信息)。 在现实捕捉中,网格通常会通过从分辨率越来越高的数字图像中获得的逼真纹理来增强。 除了顶点和三角形数据之外,它们还具有每个顶点的纹理坐标和关联的打包纹理图像。
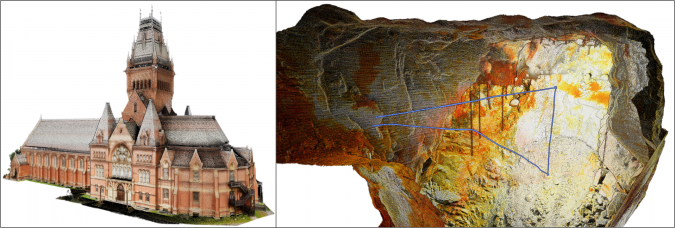
图 1:查看大型 3D 点云和网格是现代地理空间软件解决方案的基本要求。
左:使用 RGB 点颜色查看哈佛大学纪念堂的手持现实捕捉。
右:使用 Emesent Hovermap 无人机平台捕获的矿场(澳大利亚新南威尔士州达尔盖斯金矿)的地下扫描,并通过反射率进行着色。
可视化解决方案之间 3D 数据的互操作性至关重要。 对于点云,地理空间行业开发了专用格式:LAS 和 E57。 对于网格,通常采用常见的 3D 图形数据标准,例如 OBJ、FBX 或最近的 glTF 格式。 此类格式的主要优点是大多数 3D 图形软件可以轻松解析它们,并提供开源代码库供开发人员集成到自己的解决方案中。 然而,一个重要的缺点是它们是整体的:完整的数据集存储为单个几何文件(如果是纹理网格,则带有随附的材质或纹理图像文件)。 此外,这些格式并非设计用于地理空间坐标系统,需要在渲染管道中进行额外处理。
3、大数据问题
地理空间可视化面临的一个持续挑战是数据集大小。 激光扫描或摄影测量的输出,无论是点云、网格还是纹理 3D 模型,通常包含数百万甚至数十亿个点或三角形,以及越来越高分辨率的纹理图像。 传统上,实时 3D 可视化受到可用计算硬件的限制,高规格工作站是先决条件,并且需要减少大量数据(因此准确性)以确保交互性。
已经开发了多种技术来帮助大型 3D 数据集的实时可视化。 细节层次 (LOD) 方法可以智能地简化详细的 3D 模型,从而生成可以更快渲染的较低分辨率版本,而不会损失视觉保真度。 同样,mipmapping 根据 3D 场景中模型与虚拟相机位置之间的距离优化纹理图像的分辨率,有助于减少渲染管道的负载。 另一种方法是法线贴图,它将 3D 模型的详细几何形状编码为类似图像的数据结构,然后与模型的粗略版本同时渲染,以提供逼真的视觉外观。 单独来看,此类技术涉及分辨率和准确性之间的权衡,以确保交互式渲染。 然而,当它们与另一种重要的数据结构(切片 3D 模型)和核外内存管理相结合时,可以实现几乎无限数据大小的可视化管道。
4、切片 3D 模型:优点和标准
加速数据结构(例如八叉树或 kd 树)允许 3D 数据集根据其内部几何密度进行分层分离。 对于原始的高分辨率 3D 模型,确定了一组 LOD,并将每个级别划分为空间节点或图块(图 2)。 在保存到磁盘之前,节点树会填充每个级别相应的几何图形。 由此产生的磁盘文件层次结构(切片的 3D 模型)通过文件引用链接,并且可以通过配备合适内存管理方案的 3D 查看器轻松遍历。 这可确保任何时刻加载的数据量根据用户当前的查看位置进行平衡,这意味着即使在标准计算机上也可以高效地处理大面积和高度详细的模型。
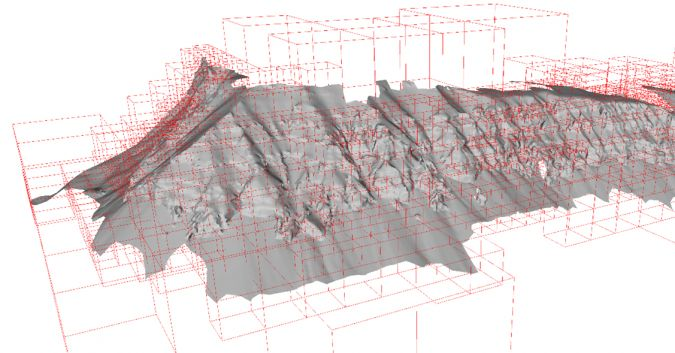
图 2:使用八叉树结构分割 3D 网格。 立方体大小反映了网格各部分最高分辨率数据的密度。 这用于创建分块 3D 模型作为 LOD 和磁盘文件的层次结构。
直到最近,3D 平铺模型的可用标准还很少,特别是对于 Web 可视化而言,OpenSceneGraph (OSGB) 格式是少数常用的格式之一。 现在,情况已经发生了变化,修订后的开放地理空间联盟 (OGC) 3D 切片和索引 3D 场景层 (i3S/SLPK) 格式社区标准现已在整个行业受到关注。 这些格式专为地理空间坐标系而设计,适合通过互联网传输点云和 3D 模型。
5、云感知 3D 模型访问
切片 3D 模型可能包含数百或数千个小磁盘文件,使用传统文件复制进行共享可能具有挑战性。 相反,云存储和存储库是分发高分辨率 3D 数据的便捷方式,类似于栅格 WMS 或 WCS 标准。 通过 API 访问平铺 3D 模型可以隐藏用户的数据集大小和复杂性,用户可以使用云感知软件通过互联网使用 3D 数据。 几何和图像纹理压缩(例如 Draco 和 KTX)可减少存储需求和需要传输的数据量。 3D 模型流的强大功能现已通过行业解决方案(例如 ArcGIS 或 Cesium 平台)或定制数据存储库(例如地球科学领域的 V3Geo)得以实现。
尽管非常方便,但数据安全和保障是使用云 3D 模型的组织的基本考虑因素。 本地部署对于确保与云无关的存储非常重要,特别是对于受国家或组织边界限制的政府机构而言。 亚马逊或微软等提供商提供的流行云解决方案可能不适合这些组织。 IT 系统集成和安全是与大数据和可视化相关的挑战,必须谨慎处理。
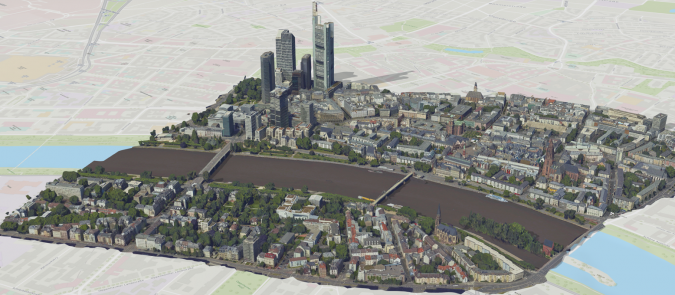
图 3:法兰克福市中心的切片3D 模型(i3S/SLPK 格式),由云端提供并在 Web 浏览器中可视化
6、数据整合
大型 3D 点云和纹理网格通常是大量补充数据的空间框架,可用于传达特定于应用程序的信息。 这可能是额外的地理参考数据,例如专题地图、高程模型或矢量文件,以及测量结果、其他分析方法的结果、时间序列和实时传感器数据、模拟结果等(图 4)。 这种方法构成了管理数据资产的数字孪生的基础,并且对于教育和利益相关者沟通至关重要。 另一个重要的增长领域是来自多个传感器的数据集的融合,尤其是来自无人机的数据集。 安装在无人机上的热、多/高光谱或地球物理传感器增加了额外的测绘功能,其中组合 2D-3D 输出的可视化有助于结果的解释和验证。
7、可视化硬件
可视化不再局限于需要高专业知识、资源甚至 Powerwall 或 CAVE 设施物理空间的高端硬件。 当前的计算硬件包括桌面、移动和网络,以及提供沉浸式体验的设备,例如 VR、AR 和混合现实。 因此,3D 可视化可以部署在多种情况下,从桌面 PC 上的传统工作到监控实时采集或在现场执行 3D 数据的测量和分析,以及使用沉浸式设备的协作团队合作。
3D 立体观看曾经主要局限于数字摄影测量工作站或在简短演示中展示数据集。 对于“实际工作”来说,立体声通常分辨率低、黑暗且长时间不舒服。 如今的无源立体声显示器明亮、锐利,分辨率达到当前的 4k 标准。 软件越来越多地针对立体声用户进行优化,鼠标光标甚至用户界面都可以在传统鼠标/2D 显示器和立体声/跟踪设备设置之间无缝部署。
8、最后的想法
3D 可视化领域取得了巨大的进步,基于大型 3D 数据集的新产品的入门门槛现已大大降低。 改进的硬件、游戏引擎和网络图形 API 无需高级工作站即可实现高性能渲染。 切片 3D 模型和数据标准(例如 3D Tiles)的日益普及,再加上云存储,使大型 3D 数据集的使用、共享和发布方式发生了巨大变化。 对于地理空间行业来说,这降低了开发团队和用户的成本,他们现在可以将资源更多地集中在集成不同的数据集和实现应用程序结果上。
挑战依然存在,快速变化的可视化技术需要频繁更新和专业知识开发。 尽管图形硬件、API 和数据格式已经走向标准化,但 3D 可视化的整体情况仍然是碎片化的,桌面、移动和 Web 开发以及不同操作系统通常需要不同的方法。 没有一种技术能够适合所有情况。 然而,进展仍在继续,跨平台和桌面 Web 解决方案(例如 WebGPU)正在开发中,并且游戏引擎越来越多地可以跨多个设备访问。 3D 地理空间可视化的未来有望创造引人入胜且有吸引力的体验。