工具配置
FTM就是个计时器,比普通的定时器灵活很多。
要先配置好它映射哪个引脚。
先看看它用哪个设备,FTM3。

initialization
FTM moudule clock setup
初始化里面的时钟配置,使用48M的系统时钟,32分频就是1.5M。

在时钟管理里面也能看得到

FTM global configuration
默认配置就行,基本用不到。

生成代码
在Generated_Code/flexTimer_ic1.c和flexTimer_ic1.h里面,生成的就是上面对应的配置信息。
/* Global configuration of flexTimer_ic1 */
ftm_user_config_t flexTimer_ic1_InitConfig =
{
{
true, /* Software trigger state */
false, /* Hardware trigger 1 state */
false, /* Hardware trigger 2 state */
false, /* Hardware trigger 3 state */
false, /* Max loading point state */
false, /* Min loading point state */
FTM_SYSTEM_CLOCK, /* Update mode for INVCTRL register */
FTM_SYSTEM_CLOCK, /* Update mode for SWOCTRL register */
FTM_SYSTEM_CLOCK, /* Update mode for OUTMASK register */
FTM_SYSTEM_CLOCK, /* Update mode for CNTIN register */
false, /* Automatic clear of the trigger*/
FTM_UPDATE_NOW, /* Synchronization point */
},
FTM_MODE_INPUT_CAPTURE, /* Mode of operation for FTM */
FTM_CLOCK_DIVID_BY_32, /* FTM clock prescaler */
FTM_CLOCK_SOURCE_SYSTEMCLK, /* FTM clock source */
FTM_BDM_MODE_00, /* FTM debug mode */
false, /* Interrupt state */
false /* Initialization trigger */
};Update mode的位置可以选时钟,系统时钟或者PWM时钟。
/*!
* @brief FTM sync source
*
* Implements : ftm_reg_update_t_Class
*/
typedef enum
{
FTM_SYSTEM_CLOCK = 0U, /*!< Register is updated with its buffer value at all rising
* edges of system clock */
FTM_PWM_SYNC = 1U /*!< Register is updated with its buffer value at the
* FTM synchronization */
} ftm_reg_update_t;configuration
基本按照需求配置就行,这里通道数量是自己配的,最大值定死了,通道号为0,操作方式是测量输入信号,滤波数值为0也就是不滤波,用两个上升沿之间的时间作为周期,顺带设定回调函数。
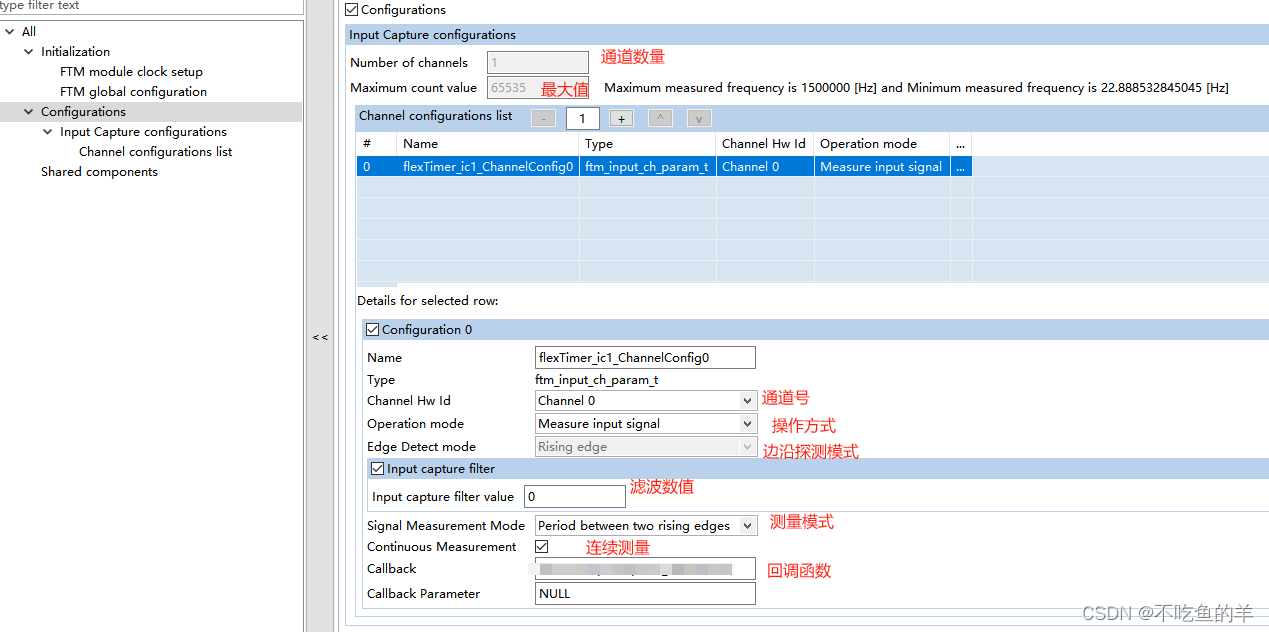
生成代码如下,一个配置结构体下面有一个通道结构体。
/* Channels configuration structure for flexTimer_ic1 input capture */
ftm_input_ch_param_t flexTimer_ic1_InputCaptureChannelConfig[1] =
{
{
0U, /* Channel id */
FTM_SIGNAL_MEASUREMENT, /* Input capture operation mode */
FTM_RISING_EDGE, /* Edge alignment mode */
FTM_RISING_EDGE_PERIOD_MEASUREMENT, /* Signal measurement operation type */
0U, /* Filter value */
false, /* Filter state (enabled/disabled) */
true, /* Continuous measurement state */
NULL, /* Vector of callbacks parameters for channels events */
FanTachInputCapture_IRQHandler /* Vector of callbacks for channels events */
}
};
/* Input capture configuration for flexTimer_ic1 */
ftm_input_param_t flexTimer_ic1_InputCaptureConfig =
{
1U, /* Number of channels */
65535U, /* Max count value */
flexTimer_ic1_InputCaptureChannelConfig /* Channels configuration */
};接口使用
接口在SDK\platform\drivers\src\ftm\ftm_common.c里面
FTM_DRV_Init
根据FTM设备配置结构体初始化,配置状态由state获取。
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_Init
* Description : Initializes the FTM driver and get the clock frequency value
* which select one of three possible clock sources for the FTM counter.
*
* Implements : FTM_DRV_Init_Activity
*END**************************************************************************/
status_t FTM_DRV_Init(uint32_t instance,
const ftm_user_config_t * info,
ftm_state_t * state)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(info != NULL);
DEV_ASSERT(state != NULL);
DEV_ASSERT((info->ftmClockSource == FTM_CLOCK_SOURCE_SYSTEMCLK) || \
(info->ftmClockSource == FTM_CLOCK_SOURCE_FIXEDCLK) || \
(info->ftmClockSource == FTM_CLOCK_SOURCE_EXTERNALCLK));
FTM_Type * ftmBase = g_ftmBase[instance];
status_t status = STATUS_SUCCESS;
uint8_t index = 0U;
/* Check if this instance is already initialized */
if (ftmStatePtr[instance] != NULL)
{
status = STATUS_ERROR;
}
else
{
/* Configure state structure. */
state->ftmClockSource = info->ftmClockSource;
state->ftmMode = FTM_MODE_NOT_INITIALIZED;
state->ftmPeriod = 0U;
ftmStatePtr[instance] = state;
for (index = 0U; index < FEATURE_FTM_CHANNEL_COUNT; index++)
{
state->measurementResults[index] = 0U;
state->channelsCallbacksParams[index] = NULL;
state->channelsCallbacks[index] = NULL;
state->enableNotification[index] = false;
}
/* The reset operation doesn't care about write protection. FTM_DRV_Reset will
* disable this protection.*/
FTM_DRV_Reset(ftmBase);
FTM_DRV_InitModule(ftmBase, info->ftmPrescaler);
/* Get clock name used to configure the FlexTimer module */
state->ftmSourceClockFrequency = FTM_DRV_GetFrequency(instance);
/* Check the functional clock is selected for FTM */
DEV_ASSERT(state->ftmSourceClockFrequency > 0U);
}
if (STATUS_SUCCESS == status)
{
/* Check if the mode operation in PWM mode */
if ((FTM_MODE_EDGE_ALIGNED_PWM == info->ftmMode) || (FTM_MODE_CEN_ALIGNED_PWM == info->ftmMode) || (FTM_MODE_OUTPUT_COMPARE == info->ftmMode))
{
/* Configure sync for between registers and buffers */
status = FTM_DRV_SetSync(instance, &(info->syncMethod));
}
/* Enable the generation of initialization trigger on chip module */
FTM_DRV_SetInitTriggerCmd(ftmBase, info->enableInitializationTrigger);
FTM_DRV_SetBdmMode(ftmBase, info->BDMMode);
/* Check if enable interrupt in counter mode */
if (info->isTofIsrEnabled)
{
FTM_DRV_SetTimerOverflowInt(ftmBase, true);
INT_SYS_EnableIRQ(g_ftmOverflowIrqId[instance]);
}
else
{
FTM_DRV_SetTimerOverflowInt(ftmBase, false);
INT_SYS_DisableIRQ(g_ftmOverflowIrqId[instance]);
}
}
return status;
}FTM_DRV_Deinit
逆初始化,整个设备都逆初始化,包括里面所有通道。
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_Deinit
* Description : Shuts down the FTM driver.
* First, FTM_DRV_Init must be called. Then this function will disables the FTM module.
*
* Implements : FTM_DRV_Deinit_Activity
*END**************************************************************************/
status_t FTM_DRV_Deinit(uint32_t instance)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
/* Reset all FTM register */
FTM_DRV_Reset(ftmBase);
ftmStatePtr[instance] = NULL;
return STATUS_SUCCESS;
}FTM_DRV_GetDefaultConfig
获取默认配置结构体,就是你不会配置的时候又它来给你自动配也可以。
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_GetDefaultConfig
* Description : This function will get the default configuration values
* in the structure which is used as a common use-case.
* Return : None
* Implements : FTM_DRV_GetDefaultConfig_Activity
*END**************************************************************************/
void FTM_DRV_GetDefaultConfig(ftm_user_config_t * const config)
{
DEV_ASSERT(config != NULL);
config->syncMethod.softwareSync = true;
config->syncMethod.hardwareSync0 = false;
config->syncMethod.hardwareSync1 = false;
config->syncMethod.hardwareSync2 = false;
config->syncMethod.maxLoadingPoint = false;
config->syncMethod.minLoadingPoint = false;
config->syncMethod.inverterSync = FTM_SYSTEM_CLOCK;
config->syncMethod.outRegSync = FTM_SYSTEM_CLOCK;
config->syncMethod.maskRegSync = FTM_SYSTEM_CLOCK;
config->syncMethod.initCounterSync = FTM_SYSTEM_CLOCK;
config->syncMethod.autoClearTrigger = true;
config->syncMethod.syncPoint = FTM_UPDATE_NOW;
config->ftmMode = FTM_MODE_EDGE_ALIGNED_PWM;
config->ftmPrescaler = FTM_CLOCK_DIVID_BY_1;
config->ftmClockSource = FTM_CLOCK_SOURCE_SYSTEMCLK;
config->BDMMode = FTM_BDM_MODE_11;
config->isTofIsrEnabled = false;
config->enableInitializationTrigger = false;
}
FTM_DRV_MaskOutputChannels
屏蔽指定通道
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_MaskOutputChannels
* Description : This function will mask the output of the channels and at match
* events will be ignored by the masked channels.
*
* Implements : FTM_DRV_MaskOutputChannels_Activity
*END**************************************************************************/
status_t FTM_DRV_MaskOutputChannels(uint32_t instance,
uint32_t channelsMask,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
FTM_DRV_SetOutmaskReg(ftmBase, channelsMask);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetInitialCounterValue
配置计数器初始值
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetInitialCounterValue
* Description : This function configure the initial counter value. The counter
* will get this value after an overflow event.
*
* Implements : FTM_DRV_SetInitialCounterValue_Activity
*END**************************************************************************/
status_t FTM_DRV_SetInitialCounterValue(uint32_t instance,
uint16_t counterValue,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
FTM_DRV_SetCounterInitVal(ftmBase, counterValue);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetHalfCycleReloadPoint
配置重载值
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetHalfCycleReloadPoint
* Description : This function configure the value of the counter which will
* generates an reload point.
*
* Implements : FTM_DRV_SetHalfCycleReloadPoint_Activity
*END**************************************************************************/
status_t FTM_DRV_SetHalfCycleReloadPoint(uint32_t instance,
uint16_t reloadPoint,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
FTM_DRV_SetHalfCycleValue(ftmBase, reloadPoint);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetSoftOutChnValue
将强制通道的输出值为特定值
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetSoftOutChnValue
* Description : This function will force the output value of a channel to a specific value.
* Before using this function it's mandatory to mask the match events using
* FTM_DRV_MaskOutputChannels and to enable software output control using
* FTM_DRV_SetSoftwareOutputChannelControl.
*
* Implements : FTM_DRV_SetSoftOutChnValue_Activity
*END**************************************************************************/
status_t FTM_DRV_SetSoftOutChnValue(uint32_t instance,
uint8_t channelsValues,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
FTM_DRV_SetAllChnSoftwareCtrlVal(ftmBase, channelsValues ^ (uint8_t)ftmBase->POL);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetSoftwareOutputChannelControl
配置哪个输出通道可以由软件控制
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetSoftwareOutputChannelControl
* Description : This function will configure which output channel can be
* software controlled.
*
* Implements : FTM_DRV_SetSoftwareOutputChannelControl_Activity
*END**************************************************************************/
status_t FTM_DRV_SetSoftwareOutputChannelControl(uint32_t instance,
uint8_t channelsMask,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
FTM_DRV_SetAllChnSoftwareCtrlCmd(ftmBase, channelsMask);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetAllChnSoftwareOutputControl
控制通道列表输出到指定的值
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetAllChnSoftwareOutputControl
* Description : This function will control list of channels by software to force
* the output to specified value.
* Despite the odd channels are configured as HIGH/LOW, they will be inverted in the following
* configuration: COMP bit = 1 and CH(n)OCV and CH(n+1)OCV are HIGH. Please check Software
* output control behavior chapter from RM.
*
* Implements : FTM_DRV_SetAllChnSoftwareOutputControl_Activity
*END**************************************************************************/
status_t FTM_DRV_SetAllChnSoftwareOutputControl(uint32_t instance,
uint8_t channelMask,
uint8_t channelValueMask,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
uint16_t value = 0U;
value = (uint16_t)(((uint16_t)channelValueMask ^ (uint16_t)ftmBase->POL) << (uint16_t)8U) | (uint16_t)channelMask;
/* Enable and force the software control of channels output */
FTM_DRV_SoftwareOutputControl(ftmBase, value);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetInvertingControl
基本不会用
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetInvertingControl
* Description : This function will configure if the second channel of a pair
* will be inverted or not.
*
* Implements : FTM_DRV_SetInvertingControl_Activity
*END**************************************************************************/
status_t FTM_DRV_SetInvertingControl(uint32_t instance,
uint8_t channelsPairMask,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
FTM_DRV_SetInvctrlReg(ftmBase, channelsPairMask);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetModuloCounterValue
配置最大计数值
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetModuloCounterValue
* Description : This function configure the maximum counter value.
*
* Implements : FTM_DRV_SetModuloCounterValue_Activity
*END**************************************************************************/
status_t FTM_DRV_SetModuloCounterValue(uint32_t instance,
uint16_t counterValue,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
FTM_DRV_SetMod(ftmBase, counterValue);
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}FTM_DRV_SetOutputlevel
设置通道电平
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetOutputlevel
* Description : This function will set the channel edge or level on the selection
* of the channel mode.
*
* Implements : FTM_DRV_SetOutputlevel_Activity
*END**************************************************************************/
status_t FTM_DRV_SetOutputlevel(uint32_t instance,
uint8_t channel,
uint8_t level)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(channel < FEATURE_FTM_CHANNEL_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
/* Sets the channel edge or level selection */
FTM_DRV_SetChnEdgeLevel(ftmBase, channel, level);
return STATUS_SUCCESS;
}FTM_DRV_SetSync
设置为同步
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_SetSync
* Description : This function configure the synchronization for PWM register
* (CnV, MOD, CINT, HCR, OUTMASK).If this function is used whit wrong parameters
* it's possible to generate wrong waveform. Registers synchronization need to
* be configured for PWM and output compare mode.
*
* Implements : FTM_DRV_SetSync_Activity
*END**************************************************************************/
status_t FTM_DRV_SetSync(uint32_t instance,
const ftm_pwm_sync_t * param)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(param != NULL);
FTM_Type * ftmBase = g_ftmBase[instance];
status_t retStatus = STATUS_SUCCESS;
bool hardwareSync = param->hardwareSync0 || param->hardwareSync1 || param->hardwareSync2;
/* Software and hardware triggers are not allowed in the same time */
if ((param->softwareSync && hardwareSync) || (true != (param->softwareSync || hardwareSync)))
{
retStatus = STATUS_ERROR;
}
else if (param->softwareSync)
{
/* Configure sync for OUTMASK register */
FTM_DRV_SetOutmaskSoftwareSyncModeCmd(ftmBase, true);
/* Configure sync for INVCTRL register */
FTM_DRV_SetInvctrlSoftwareSyncModeCmd(ftmBase, true);
/* Configure sync for SWOCTRL register */
FTM_DRV_SetSwoctrlSoftwareSyncModeCmd(ftmBase, true);
/* Configure sync for MOD, HCR, CNTIN, and CnV registers */
FTM_DRV_SetModCntinCvSoftwareSyncModeCmd(ftmBase, true);
/* Configure synchronization method (waiting next loading point or now) */
FTM_DRV_SetCounterSoftwareSyncModeCmd(ftmBase, param->syncPoint);
}
else
{
/* Configure sync for OUTMASK register */
FTM_DRV_SetOutmaskHardwareSyncModeCmd(ftmBase, true);
/* Configure sync for INVCTRL register */
FTM_DRV_SetInvctrlHardwareSyncModeCmd(ftmBase, true);
/* Configure sync for SWOCTRL register */
FTM_DRV_SetSwoctrlHardwareSyncModeCmd(ftmBase, true);
/* Configure sync for MOD, HCR, CNTIN, and CnV registers */
FTM_DRV_SetModCntinCvHardwareSyncModeCmd(ftmBase, true);
/* Configure synchronization method (waiting next loading point or now) */
FTM_DRV_SetCounterHardwareSyncModeCmd(ftmBase, (bool)param->syncPoint);
}
if (STATUS_SUCCESS == retStatus)
{
/* Enhanced PWM sync is used */
FTM_DRV_SetPwmSyncModeCmd(ftmBase, true);
/* Configure trigger source for sync */
FTM_DRV_SetHardwareSyncTriggerSrc(ftmBase, 0U, param->hardwareSync0);
FTM_DRV_SetHardwareSyncTriggerSrc(ftmBase, 1U, param->hardwareSync1);
FTM_DRV_SetHardwareSyncTriggerSrc(ftmBase, 2U, param->hardwareSync2);
/* Configure loading points */
FTM_DRV_SetMaxLoadingCmd(ftmBase, param->maxLoadingPoint);
FTM_DRV_SetMinLoadingCmd(ftmBase, param->minLoadingPoint);
/* Configure sync for OUTMASK register */
FTM_DRV_SetOutmaskPwmSyncModeCmd(ftmBase, (bool)param->maskRegSync);
/* Configure sync for INVCTRL register */
FTM_DRV_SetInvctrlPwmSyncModeCmd(ftmBase, param->inverterSync);
/* Configure sync for SWOCTRL register */
FTM_DRV_SetSwoctrlPwmSyncModeCmd(ftmBase, param->outRegSync);
/* Configure sync for MOD, HCR, CNTIN, and CnV registers */
FTM_DRV_SetCntinPwmSyncModeCmd(ftmBase, param->initCounterSync);
/* Configure if FTM clears TRIGj (j=0,1,2) when the hardware trigger j is detected. */
FTM_DRV_SetHwTriggerSyncModeCmd(ftmBase, param->autoClearTrigger);
}
return retStatus;
}FTM_DRV_GenerateHardwareTrigger
配置硬件触发源
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_GenerateHardwareTrigger
* Description : This function is used to configure a trigger source for FTM instance.
* This allow a hardware trigger input which can be used in PWM synchronization.
* Note that the hardware trigger is implemented only on trigger 1 for each instance.
*
* Implements : FTM_DRV_GenerateHardwareTrigger_Activity
*END**************************************************************************/
status_t FTM_DRV_GenerateHardwareTrigger(uint32_t instance)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
SIM_Type * simeBase = SIM_BASE_PTRS;
FTM_DRV_SyncBit(simeBase, instance, true);
return STATUS_SUCCESS;
}FTM_DRV_EnableInterrupts
使能中断
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_EnableInterrupts
* Description : This function will enable the generation a list of interrupts.
* It includes the FTM overflow interrupts, the reload point interrupt, the fault
* interrupt and the channel (n) interrupt.
*
* Implements : FTM_DRV_EnableInterrupts_Activity
*END**************************************************************************/
status_t FTM_DRV_EnableInterrupts(uint32_t instance,
uint32_t interruptMask)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
uint32_t chnlInts = (interruptMask & 0x000000FFU);
uint8_t channel = 0U;
/* Enable the timer overflow interrupt */
if ((interruptMask & (uint32_t)FTM_TIME_OVER_FLOW_INT_ENABLE) != 0x0U)
{
FTM_DRV_SetTimerOverflowInt(ftmBase, true);
INT_SYS_EnableIRQ(g_ftmOverflowIrqId[instance]);
}
/* Enable the fault interrupt */
if ((interruptMask & (uint32_t)FTM_FAULT_INT_ENABLE) != 0x0U)
{
FTM_DRV_SetFaultInt(ftmBase, true);
INT_SYS_EnableIRQ(g_ftmFaultIrqId[instance]);
}
/* Enable the reload interrupt */
if ((interruptMask & (uint32_t)FTM_RELOAD_INT_ENABLE) != 0x0U)
{
FTM_DRV_SetReIntEnabledCmd(ftmBase, true);
INT_SYS_EnableIRQ(g_ftmReloadIrqId[instance]);
}
/* Enable the channel interrupts */
while (chnlInts != 0U)
{
if ((chnlInts & 0x1U) != 0x0U)
{
FTM_DRV_EnableChnInt(ftmBase, channel);
INT_SYS_EnableIRQ(g_ftmIrqId[instance][channel]);
}
channel++;
chnlInts = chnlInts >> 1U;
}
return STATUS_SUCCESS;
}FTM_DRV_DisableInterrupts
失能中断
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_DisableInterrupts
* Description : This function is used to disable some interrupts.
*
* Implements : FTM_DRV_DisableInterrupts_Activity
*END**************************************************************************/
void FTM_DRV_DisableInterrupts(uint32_t instance,
uint32_t interruptMask)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
uint32_t chnlInts = (interruptMask & 0x000000FFU);
uint8_t channel = 0U;
/* Disable the timer overflow interrupt */
if ((interruptMask & (uint32_t)FTM_TIME_OVER_FLOW_INT_ENABLE) != 0x0U)
{
FTM_DRV_SetTimerOverflowInt(ftmBase, false);
INT_SYS_DisableIRQ(g_ftmOverflowIrqId[instance]);
}
/* Disable the fault interrupt */
if ((interruptMask & (uint32_t)FTM_FAULT_INT_ENABLE) != 0x0U)
{
FTM_DRV_SetFaultInt(ftmBase, false);
INT_SYS_DisableIRQ(g_ftmFaultIrqId[instance]);
}
/* Disable the reload interrupt */
if ((interruptMask & (uint32_t)FTM_RELOAD_INT_ENABLE) != 0x0U)
{
FTM_DRV_SetReIntEnabledCmd(ftmBase, false);
INT_SYS_DisableIRQ(g_ftmReloadIrqId[instance]);
}
/* Disable the channel interrupts */
while (chnlInts != 0U)
{
if ((chnlInts & 0x1U) != 0x0U)
{
FTM_DRV_DisableChnInt(ftmBase, channel);
INT_SYS_DisableIRQ(g_ftmIrqId[instance][channel]);
}
channel++;
chnlInts = chnlInts >> 1U;
}
}FTM_DRV_GetEnabledInterrupts
看看中断是不是使能了
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_GetEnabledInterrupts
* Description : This function will get the enabled FTM interrupts.
*
* Implements : FTM_DRV_GetEnabledInterrupts_Activity
*END**************************************************************************/
uint32_t FTM_DRV_GetEnabledInterrupts(uint32_t instance)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type const * ftmBase = g_ftmBase[instance];
uint32_t enabledInterrupts = 0U;
uint8_t channel = FEATURE_FTM_CHANNEL_COUNT;
/* Check if timer overflow interrupt is enabled */
if (FTM_DRV_IsOverflowIntEnabled(ftmBase) == true)
{
enabledInterrupts |= (uint32_t)FTM_TIME_OVER_FLOW_INT_ENABLE;
}
/* Check if fault interrupt is enabled */
if (FTM_DRV_IsFaultIntEnabled(ftmBase) == true)
{
enabledInterrupts |= (uint32_t)FTM_FAULT_INT_ENABLE;
}
/* Check if the reload interrupt is enabled */
if (FTM_DRV_IsReloadIntEnabled(ftmBase) == true)
{
enabledInterrupts |= (uint32_t)FTM_RELOAD_INT_ENABLE;
}
/* Check if the channel interrupts are enabled */
while (channel > 0U)
{
channel--;
if (FTM_DRV_IsChnIntEnabled(ftmBase, channel) == true)
{
enabledInterrupts |= (1UL << (uint32_t)channel);
}
}
return enabledInterrupts;
}FTM_DRV_GetStatusFlags
获取状态标志位
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_GetStatusFlags
* Description : This function will get the FTM status flags.
*
* Implements : FTM_DRV_GetStatusFlags_Activity
*END**************************************************************************/
uint32_t FTM_DRV_GetStatusFlags(uint32_t instance)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type const * ftmBase = g_ftmBase[instance];
uint8_t channel = 0U;
uint32_t statusFlags = 0U;
/* Check the timer flag */
if (FTM_DRV_HasTimerOverflowed(ftmBase) == true)
{
statusFlags |= (uint32_t)FTM_TIME_OVER_FLOW_FLAG;
}
/* Check fault flag */
if (FTM_DRV_GetDetectedFaultInput(ftmBase) == true)
{
statusFlags |= (uint32_t)FTM_FAULT_FLAG;
}
/* Check reload flag */
if (FTM_DRV_GetReloadFlag(ftmBase) == true)
{
statusFlags |= (uint32_t)FTM_RELOAD_FLAG;
}
/* Check channel trigger flag */
if (FTM_DRV_IsChnTriggerGenerated(ftmBase) == true)
{
statusFlags |= (uint32_t)FTM_CHANNEL_TRIGGER_FLAG;
}
/* Lower 8 bits contain the channel status flags */
for (channel = 0U; channel < FEATURE_FTM_CHANNEL_COUNT; channel++)
{
if (FTM_DRV_HasChnEventOccurred(ftmBase, channel) == true)
{
statusFlags |= (1UL << (uint32_t)channel);
}
}
return statusFlags;
}
FTM_DRV_ClearStatusFlags
清除状态标志位
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_ClearStatusFlags
* Description : This function is used to clear the FTM status flags.
*
* Implements : FTM_DRV_ClearStatusFlags_Activity
*END**************************************************************************/
void FTM_DRV_ClearStatusFlags(uint32_t instance,
uint32_t flagMask)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
uint32_t chnlMask = (flagMask & 0x000000FFU);
uint8_t channel = 0U;
/* Clear the timer overflow flag by writing a 0 to the bit while it is set */
if ((flagMask & (uint32_t)FTM_TIME_OVER_FLOW_FLAG) != 0x0U)
{
FTM_DRV_ClearTimerOverflow(ftmBase);
}
/* Clear fault flag by writing a 0 to the bit while it is set */
if ((flagMask & (uint32_t)FTM_FAULT_FLAG) != 0x0U)
{
FTM_DRV_ClearFaultsIsr(ftmBase);
}
/* Check reload flag by writing a 0 to the bit while it is set */
if ((flagMask & (uint32_t)FTM_RELOAD_FLAG) != 0x0U)
{
FTM_DRV_ClearReloadFlag(ftmBase);
}
/* Clear channel trigger flag */
if ((flagMask & (uint32_t)FTM_CHANNEL_TRIGGER_FLAG) != 0x0U)
{
FTM_DRV_ClearChnTriggerFlag(ftmBase);
}
/* Clear the channel status flags by writing a 0 to the bit */
for (channel = 0U; channel < FEATURE_FTM_CHANNEL_COUNT; channel++)
{
if ((chnlMask & 0x00000001U) != 0x0U)
{
FTM_DRV_ClearChnEventStatus(ftmBase, channel);
}
chnlMask = chnlMask >> 1U;
}
}
FTM_DRV_GetFrequency
获取频率,这个在初始化函数里面用到,这个其实是可以让用户直接调用的。
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_GetFrequency
* Description : Retrieves the frequency of the clock source feeding the FTM counter.
* Function will return a 0 if no clock source is selected and the FTM counter is disabled.
* The returned value is clock sources for the FTM counter.
*
* Implements : FTM_DRV_GetFrequency_Activity
*END**************************************************************************/
uint32_t FTM_DRV_GetFrequency(uint32_t instance)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type const * ftmBase = g_ftmBase[instance];
status_t returnCode = STATUS_SUCCESS;
clock_names_t ftmClkName;
uint8_t clkPs;
uint32_t frequency = 0U;
const ftm_state_t * state = ftmStatePtr[instance];
clkPs = (uint8_t)(1U << FTM_DRV_GetClockPs(ftmBase));
switch (state->ftmClockSource)
{
case FTM_CLOCK_SOURCE_EXTERNALCLK:
returnCode = CLOCK_SYS_GetFreq(g_ftmExtClockSel[instance][1], &frequency);
if (0U == frequency)
{
ftmClkName = g_ftmExtClockSel[instance][0];
}
else
{
ftmClkName = g_ftmExtClockSel[instance][1];
}
/* Get the clock frequency value */
returnCode = CLOCK_SYS_GetFreq(ftmClkName, &frequency);
break;
case FTM_CLOCK_SOURCE_FIXEDCLK:
/* Get the clock frequency value */
returnCode = CLOCK_SYS_GetFreq(SIM_RTCCLK_CLK, &frequency);
break;
case FTM_CLOCK_SOURCE_SYSTEMCLK:
/* Get the clock frequency value */
returnCode = CLOCK_SYS_GetFreq(CORE_CLK, &frequency);
break;
default:
/* Nothing to do */
break;
}
/* Checks the functional clock of FTM module */
(void)returnCode;
DEV_ASSERT(returnCode == STATUS_SUCCESS);
return (uint32_t)(frequency / clkPs);
}FTM_DRV_ConvertFreqToPeriodTicks
将频率转换为周期,也是初始化函数里面用到
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_ConvertFreqToPeriodTicks
* Description : This function converts the input parameters representing
* frequency in Hz to a period value in ticks needed by the hardware timer.
*
* Implements : FTM_DRV_ConvertFreqToPeriodTicks_Activity
*END**************************************************************************/
uint16_t FTM_DRV_ConvertFreqToPeriodTicks(uint32_t instance,
uint32_t freqencyHz)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(freqencyHz != 0U);
uint32_t uFTMhz;
const ftm_state_t * state = ftmStatePtr[instance];
uFTMhz = state->ftmSourceClockFrequency;
return (uint16_t)(uFTMhz / freqencyHz);
}FTM_DRV_CounterReset
计数器清零
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_CounterReset
* Description : This function will allow the FTM to restart the counter to
* its initial counting value in the register.
* Note that the configuration is set in the FTM_DRV_SetSync() function to make
* sure that the FTM registers are updated by software trigger or hardware trigger.
*
* Implements : FTM_DRV_CounterReset_Activity
*END**************************************************************************/
status_t FTM_DRV_CounterReset(uint32_t instance,
bool softwareTrigger)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
/* Updates the counter with its initial value */
FTM_DRV_SetCounter(ftmBase, 0U);
/* Set a software trigger or waiting a hardware trigger */
FTM_DRV_SetSoftwareTriggerCmd(ftmBase, softwareTrigger);
return STATUS_SUCCESS;
}SDK接口
有些接口是SDK里面才有的,也写在这里。
FTM_DRV_InitMeasurement
初始化测量,在初始化通道的时候调用的。
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_InitMeasurement
* Description : This function is used to initialize the measurement mode in the
* input capture mode. It is called in the FTM_DRV_InitInputCapture function.
*
*END**************************************************************************/
static status_t FTM_DRV_InitMeasurement(uint32_t instance,
uint8_t channel,
bool continuousModeEn,
ftm_signal_measurement_mode_t measurementType)
{
DEV_ASSERT((channel % 2U) == 0U);
FTM_Type * ftmBase = g_ftmBase[instance];
uint8_t chnlPairNum = (uint8_t)(channel >> 1U);
status_t retStatus = STATUS_SUCCESS;
/* Enable the dual edge mode */
FTM_DRV_SetDualEdgeCaptureCmd(ftmBase, chnlPairNum, true);
/* Enable dual edge input capture */
FTM_DRV_SetDualChnDecapCmd(ftmBase, chnlPairNum, true);
/* If continuous mode is set */
if (true == continuousModeEn)
{
/* Set MSnA and MSnB bit */
FTM_DRV_SetChnMSnBAMode(ftmBase, channel, 3U);
}
else
{
/* Clear MSnA and Set MSnB bit */
FTM_DRV_SetChnMSnBAMode(ftmBase, channel, 2U);
}
/* Check If want to measure a pulse width or period of the signal */
if ((FTM_PERIOD_ON_MEASUREMENT == measurementType) || (FTM_RISING_EDGE_PERIOD_MEASUREMENT== measurementType))
{
FTM_DRV_SetChnEdgeLevel(ftmBase, channel, 1U);
if (FTM_PERIOD_ON_MEASUREMENT == measurementType)
{
/* Measure time between rising and falling edge - positive duty */
FTM_DRV_SetChnEdgeLevel(ftmBase, (uint8_t)(channel + 1U), 2U);
}
else
{
/* If channel (n) is configured to capture falling edges (ELS(n)B:ELS(n)A = 0:1)
* then channel (n+1) also captures falling edges (ELS(n+1)B:ELS(n+1)A = 0:1) */
FTM_DRV_SetChnEdgeLevel(ftmBase, (uint8_t)(channel + 1U), 1U);
}
}
else if ((FTM_PERIOD_OFF_MEASUREMENT == measurementType) || (FTM_FALLING_EDGE_PERIOD_MEASUREMENT == measurementType))
{
FTM_DRV_SetChnEdgeLevel(ftmBase, channel, 2U);
if (FTM_PERIOD_OFF_MEASUREMENT == measurementType)
{
/* Measure time between falling and rising edge - negative duty */
FTM_DRV_SetChnEdgeLevel(ftmBase, (uint8_t)(channel + 1U), 1U);
}
else
{
/* If channel (n) is configured to capture rising edges (ELS(n)B:ELS(n)A = 1:0) than
* channel (n+1) is setup to capture also raising edges (ELS(n+1)B:ELS(n+1)A = 1:0) */
FTM_DRV_SetChnEdgeLevel(ftmBase, (uint8_t)(channel + 1U), 2U);
}
}
else
{
retStatus = STATUS_ERROR;
}
/* Enable the interrupt request for the channel which will indicate that the measurement is done. */
FTM_DRV_EnableChnInt(ftmBase, (uint8_t)(channel + 1U));
INT_SYS_EnableIRQ(g_ftmIrqId[instance][channel]);
return retStatus;
}FTM_DRV_InitInputCapture
初始化输入通道,也是要在初始化的时候调用。
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_InitInputCapture
* Description : Configures Channel Input Capture for either getting time-stamps on edge detection
* or on signal measurement . When the edge specified in the captureMode
* argument occurs on the channel the FTM counter is captured into the CnV register.
* The user will have to read the CnV register separately to get this value. The filter
* function is disabled if the filterVal argument passed in is 0. The filter function
* is available only on channels 0,1,2,3.
*
* Implements : FTM_DRV_InitInputCapture_Activity
*END**************************************************************************/
status_t FTM_DRV_InitInputCapture(uint32_t instance,
const ftm_input_param_t * param)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(param != NULL);
FTM_Type * ftmBase = g_ftmBase[instance];
uint8_t chnlPairNum = 0U;
uint8_t index = 0U;
uint8_t hwChannel = 0U;
bool contModeEn;
ftm_signal_measurement_mode_t measurementType;
ftm_state_t * state = ftmStatePtr[instance];
status_t retStatus = STATUS_SUCCESS;
if ((NULL != state) && (FTM_MODE_NOT_INITIALIZED == state->ftmMode))
{
FTM_DRV_SetClockSource(ftmBase, FTM_CLOCK_SOURCE_NONE);
FTM_DRV_SetCounterInitVal(ftmBase, 0U);
FTM_DRV_SetMod(ftmBase, param->nMaxCountValue);
FTM_DRV_SetCpwms(ftmBase, false);
/* Disable the combine mode */
FTM_DRV_SetDualChnMofCombineCmd(ftmBase, chnlPairNum, false);
FTM_DRV_SetDualChnCombineCmd(ftmBase, chnlPairNum, false);
for (index = 0U; index < param->nNumChannels; index++)
{
hwChannel = param->inputChConfig[index].hwChannelId;
chnlPairNum = (uint8_t)(hwChannel >> 1U);
/* Save in state structure user define handlers */
state->channelsCallbacksParams[hwChannel] = param->inputChConfig[index].channelsCallbacksParams;
state->channelsCallbacks[hwChannel] = param->inputChConfig[index].channelsCallbacks;
state->enableNotification[hwChannel] = true;
/* Enable filtering for input channels */
if (hwChannel < CHAN4_IDX)
{
if (true == param->inputChConfig[index].filterEn)
{
FTM_DRV_SetChnInputCaptureFilter(ftmBase, hwChannel, (uint8_t)param->inputChConfig[index].filterValue);
}
else
{
FTM_DRV_SetChnInputCaptureFilter(ftmBase, hwChannel, 0U);
}
}
if (FTM_EDGE_DETECT == param->inputChConfig[index].inputMode)
{
/* Disable the dual edge mode */
FTM_DRV_SetDualEdgeCaptureCmd(ftmBase, chnlPairNum, false);
/* Set input capture mode */
FTM_DRV_SetChnMSnBAMode(ftmBase, hwChannel, 0U);
/* Set the event which will generate the interrupt */
FTM_DRV_SetChnEdgeLevel(ftmBase, hwChannel, (uint8_t)param->inputChConfig[index].edgeAlignement);
/* Enable interrupt request for the current channel */
FTM_DRV_EnableChnInt(ftmBase, hwChannel);
INT_SYS_EnableIRQ(g_ftmIrqId[instance][hwChannel]);
}
else if (FTM_SIGNAL_MEASUREMENT == param->inputChConfig[index].inputMode)
{
measurementType = param->inputChConfig[index].measurementType;
contModeEn = param->inputChConfig[index].continuousModeEn;
/* Configure the measurement type */
retStatus = FTM_DRV_InitMeasurement(instance, hwChannel, contModeEn, measurementType);
}
else
{
/* Do nothing */
}
if (STATUS_SUCCESS != retStatus)
{
break;
}
}
if (STATUS_SUCCESS == retStatus)
{
state->ftmMode = FTM_MODE_INPUT_CAPTURE;
/* Set clock source to start the counter */
FTM_DRV_SetClockSource(ftmBase, state->ftmClockSource);
}
}
else
{
retStatus = STATUS_ERROR;
}
return retStatus;
}FTM_DRV_DeinitInputCapture
逆初始化输入捕获
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_DeinitInputCapture
* Description : Disables Channel Input Capture
*
* Implements : FTM_DRV_DeinitInputCapture_Activity
*END**************************************************************************/
status_t FTM_DRV_DeinitInputCapture(uint32_t instance,
const ftm_input_param_t * param)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(param != NULL);
FTM_Type * ftmBase = g_ftmBase[instance];
uint8_t chnlPairNum = 0U;
uint8_t index = 0U;
uint8_t hwChannel = 0U;
ftm_state_t * state = ftmStatePtr[instance];
DEV_ASSERT(state != NULL);
/* FTM counter is disabled */
FTM_DRV_SetClockSource(ftmBase, FTM_CLOCK_SOURCE_NONE);
FTM_DRV_SetCounterInitVal(ftmBase, 0U);
FTM_DRV_SetMod(ftmBase, 0xFFFFU);
FTM_DRV_SetCpwms(ftmBase, false);
for (index = 0U; index < param->nNumChannels; index++)
{
hwChannel = param->inputChConfig[index].hwChannelId;
chnlPairNum = (uint8_t)(hwChannel >> 1U);
/* Disable filtering for input channels */
if (hwChannel < CHAN4_IDX)
{
FTM_DRV_SetChnInputCaptureFilter(ftmBase, hwChannel, 0U);
}
FTM_DRV_SetDualChnCombineCmd(ftmBase, chnlPairNum, false);
FTM_DRV_SetDualEdgeCaptureCmd(ftmBase, chnlPairNum, false);
FTM_DRV_SetChnEdgeLevel(ftmBase, hwChannel, (uint8_t)0U);
FTM_DRV_DisableChnInt(ftmBase, hwChannel);
}
/* Clear Callbacks function from the state structure */
for (index = 0U; index < FEATURE_FTM_CHANNEL_COUNT; index++)
{
state->channelsCallbacksParams[index] = NULL;
state->channelsCallbacks[index] = NULL;
}
state->ftmMode = FTM_MODE_NOT_INITIALIZED;
return STATUS_SUCCESS;
}FTM_DRV_GetInputCaptureMeasurement
获取输入测量的次数,这个函数相当重要,必然用到。
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_GetInputCaptureMeasurement
* Description : This function is used to calculate the measurement and/or time stamps values
* which are read from the C(n, n+1)V registers and stored to the static buffers.
*
* Implements : FTM_DRV_GetInputCaptureMeasurement_Activity
*END**************************************************************************/
uint16_t FTM_DRV_GetInputCaptureMeasurement(uint32_t instance,
uint8_t channel)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(channel < FEATURE_FTM_CHANNEL_COUNT);
const ftm_state_t * state = ftmStatePtr[instance];
uint16_t value = 0U;
if (state != NULL)
{
value = state->measurementResults[channel];
}
return value;
}FTM_DRV_StartNewSignalMeasurement
开始测量
/*FUNCTION**********************************************************************
*
* Function Name : FTM_DRV_StartNewSignalMeasurement
* Description : This function starts new Signal Measurements on a dual input compare channel
* that is configured as single-shot measurement.
*
* Implements : FTM_DRV_StartNewSignalMeasurement_Activity
*END**************************************************************************/
status_t FTM_DRV_StartNewSignalMeasurement(uint32_t instance,
uint8_t channel)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(channel < FEATURE_FTM_CHANNEL_COUNT);
/* Clear CH(n)F and CH(n+1)F flags and Set DECAP bit */
FTM_Type * ftmBase = g_ftmBase[instance];
uint8_t chnlPairNum = (uint8_t)(channel >> 1U);
status_t retStatus = STATUS_SUCCESS;
/* Get channel mode */
if (FTM_FEATURE_INPUT_CAPTURE_SINGLE_SHOT == FTM_DRV_GetChnMode(ftmBase, channel))
{
if (FTM_DRV_GetDualEdgeCaptureBit(ftmBase, chnlPairNum))
{
/* Clear event flags for channel n and n + 1 */
FTM_DRV_ClearChnEventFlag(ftmBase, (uint8_t)(channel + 1U));
FTM_DRV_ClearChnEventFlag(ftmBase, channel);
/* Set DECAP bit to start measurement */
FTM_DRV_SetDualChnDecapCmd(ftmBase, chnlPairNum, true);
}
}
else
{
retStatus = STATUS_ERROR;
}
return retStatus;
}FTM_IC_DRV_SetChannelMode
设置通道模式
/*FUNCTION**********************************************************************
*
* Function Name : FTM_IC_DRV_SetChannelMode
* Description : This function is used to change the channel mode at run time or
* when stopping channel. The channel mode is selected in the ftm_ic_op_mode_t
* enumeration type.
*
* Implements : FTM_IC_DRV_SetChannelMode_Activity
*END**************************************************************************/
status_t FTM_IC_DRV_SetChannelMode(uint32_t instance,
uint8_t channel,
ftm_ic_op_mode_t inputMode,
bool enableContinuousCapture)
{
DEV_ASSERT(instance < FTM_INSTANCE_COUNT);
DEV_ASSERT(channel < FEATURE_FTM_CHANNEL_COUNT);
FTM_Type * ftmBase = g_ftmBase[instance];
uint8_t level = 1U;
uint8_t nextChnlevel = 1U;
uint8_t channelPair = (uint8_t)(channel >> 1U);
if (inputMode == FTM_DISABLE_OPERATION)
{
/* Set the edge level to disable operation on the channel input */
FTM_DRV_SetChnEdgeLevel(ftmBase, channel, 0x0U);
}
else if ((inputMode == FTM_TIMESTAMP_RISING_EDGE) ||
(inputMode == FTM_TIMESTAMP_FALLING_EDGE) ||
(inputMode == FTM_TIMESTAMP_BOTH_EDGES))
{
/* Disable the dual edge mode */
FTM_DRV_SetDualEdgeCaptureCmd(ftmBase, channelPair, false);
/* Set input capture mode */
FTM_DRV_SetChnMSnBAMode(ftmBase, channel, 0U);
/* Set the event which will generate the interrupt */
FTM_DRV_SetChnEdgeLevel(ftmBase, channel, (uint8_t)inputMode);
/* Enable interrupt request for the current channel */
FTM_DRV_EnableChnInt(ftmBase, channel);
}
else
{
/* Check the channel is even number */
DEV_ASSERT((channel % 2U) == 0U);
/* Enable the dual edge mode */
FTM_DRV_SetDualEdgeCaptureCmd(ftmBase, channelPair, true);
/* Enable dual edge input capture */
FTM_DRV_SetDualChnDecapCmd(ftmBase, channelPair, true);
/* If continuous mode is set*/
if (true == enableContinuousCapture)
{
/* Set MSnA and MSnB bit*/
FTM_DRV_SetChnMSnBAMode(ftmBase, channel, 3U);
}
else
{
/* Clear MSnA and Set MSnB bit*/
FTM_DRV_SetChnMSnBAMode(ftmBase, channel, 2U);
}
/* Check If want to measure a pulse width or period of the signal */
if ((FTM_MEASURE_PULSE_HIGH == inputMode) || (FTM_MEASURE_RISING_EDGE_PERIOD == inputMode))
{
if (FTM_MEASURE_PULSE_HIGH == inputMode)
{
/* Measure time between rising and falling edge - positive duty */
nextChnlevel = 2U;
}
}
else
{
level = 2U;
if (FTM_MEASURE_FALLING_EDGE_PERIOD == inputMode)
{
/* If channel (n) is configured to capture rising edges (ELS(n)B:ELS(n)A = 1:0) than
* channel (n+1) is setup to capture also raising edges (ELS(n+1)B:ELS(n+1)A = 1:0) */
nextChnlevel = 2U;
}
}
FTM_DRV_SetChnEdgeLevel(ftmBase, channel, level);
FTM_DRV_SetChnEdgeLevel(ftmBase, (uint8_t)(channel + 1U), nextChnlevel);
/* Disable interrupt request for the current channel */
FTM_DRV_DisableChnInt(ftmBase, channel);
FTM_DRV_EnableChnInt(ftmBase, (uint8_t)(channel + 1U));
}
return STATUS_SUCCESS;
}
初始化操作
由于它有一个设备配置结构体和一个通道配置结构体,所以两个都得初始化,多通道的话,就多初始化几个通道。
FTM_DRV_Init(INST_FLEXTIMER_IC1, &flexTimer_ic1_InitConfig, &ftmStateStruct);
FTM_DRV_InitInputCapture(INST_FLEXTIMER_IC1, &flexTimer_ic1_InputCaptureConfig);回调函数操作
每次抓到一个周期,都会调用这个FTM的回调函数,这个函数里面通过FTM_DRV_GetInputCaptureMeasurement获取到这个周期的计数次数,现在没1/48M计数器+1,所以看FTM分频多少次,决定了要把结果乘以多少。其实就是把计数次数转换为多少us时间。
uint32_t FTM3_IRQHandler(void)
{
uint16_t captureCount;
uint32_t timeSliceUs;
uint16_t coefficient;
captureCount = FTM_DRV_GetInputCaptureMeasurement(INST_FLEXTIMER_IC1, 0);
if (captureCount == 0) {
return;
}
if (flexTimer_ic1_InitConfig.ftmPrescaler == FTM_CLOCK_DIVID_BY_8) {
coefficient = 1;
} else if (flexTimer_ic1_InitConfig.ftmPrescaler == FTM_CLOCK_DIVID_BY_16) {
coefficient = 2;
} else if (flexTimer_ic1_InitConfig.ftmPrescaler == FTM_CLOCK_DIVID_BY_32) {
coefficient = 4;
} else if (flexTimer_ic1_InitConfig.ftmPrescaler == FTM_CLOCK_DIVID_BY_64) {
coefficient = 8;
} else if (flexTimer_ic1_InitConfig.ftmPrescaler == FTM_CLOCK_DIVID_BY_128) {
coefficient = 16;
}
timeSliceUs = captureCount * coefficient;
return timeSliceUs;
}








![[java基础揉碎]Object类详解](https://img-blog.csdnimg.cn/direct/ff94e2d601624394ae09db4a72f111b2.png)