车载毫米波雷达市场的「战火」,也在快速蔓延到行业上游。
比如,雷达SoC(新一代RF CMOS)集成化趋势。这意味着,毫米波雷达芯片方案商一次性集成射频前端、雷达信号处理基带和微处理器以及其他元器件(包括电源芯片,Flash,和CAN收发器),外围只需要很少的其他辅助器件就可以完成一套雷达模组的构建。
高性能、小型化、低成本是这种模式的最大优势。
而上一代的RF CMOS芯片方案,则是主要集成发射器、接收器、ADC转换、相位旋转器和低相位噪声VCO等元器件。而通过在一个芯片上进一步整合模拟和数字处理能力,可以进一步帮助客户在器件级降低系统尺寸和功耗,同时也相应提高了传感器安装位置以及进一步与整车设计集成的灵活性。
比如,去年TI推出的毫米波雷达单芯片SoC方案AWR2944(上一代是AWR2243),这已经是该公司推出的第二代单芯片方案。
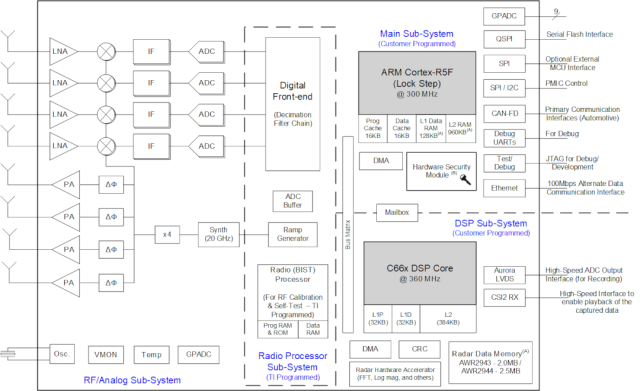
其中,产品尺寸、分辨率和RF综合性能都有较大提升,通过增加DDMA、C-PHY等硬件加速单元,检测距离比上一代提升40%,且可以解决在强干扰下细小物体的漏检。同时,首次集成硬件安全模块(HSM)以及支持车载以太网通信,进一步提升毫米波雷达产品的生命周期。
在TI公司看来,RFCMOS做高集成,高集成带来的直接优势就是高性价比,因为可以用单SoC方案解决以前用三个子系统组成的毫米波雷达传感器,这是非常重要的一点。不过,AWR2944依旧还是上一代的45nm RF CMOS工艺。
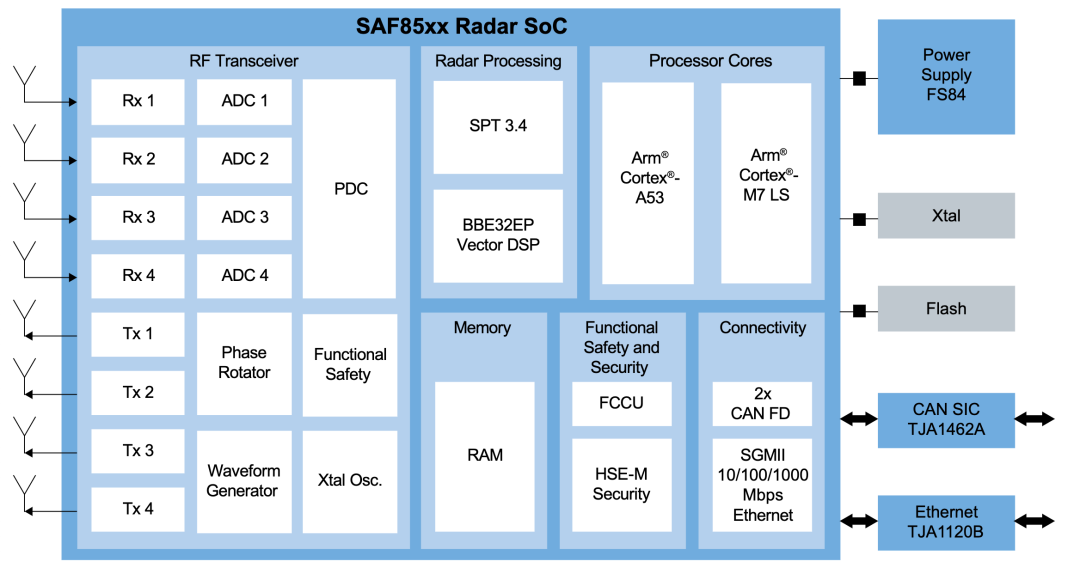
而在本周,作为TI的主要竞争对手之一,恩智浦半导体宣布推出行业首创的28nm RFCMOS工艺的单雷达芯片系列(SAF85xx),集成S32R雷达计算平台(多核处理器)和高性能收发器。
与该公司上一代产品相比,SAF85xx提供了两倍的RF性能,并将雷达信号处理速度提高了40%,体积较少30%,并满足前向和盲区4D感知的需求。
作为恩智浦的第三代RF CMOS解决方案,SAF85xx包含4发4收高性能射频收发单元,一个带硬件加速器的多核信号数据处理器(Arm®Cortex®- A53、Arm Cortex - M7),千兆以太网通信接口和内存,满足ISO 26262功能安全ASIL B要求,以及汽车网络安全标准ISO/SAE 21434(包括HSE安全模块)。
事实上,随着特斯拉「重启」毫米波雷达上车,这个赛道的热度又开始重新上升。一方面,各家芯片方案商还在不断迭代技术升级;另一方面,4D、成像技术也在帮助毫米波雷达实现短板的补缺。
去年,瑞萨电子宣布正式进军汽车毫米波雷达市场,首发推出4发4收、76-81GHz收发单元,这套名为RAA270205的MMIC是基于今年收购的Steradian Semiconductors Private Limited合作设计。最新时间点,预计明年一季度开始送样,2024年量产。
新型收发器MMIC(单片微波集成电路)适用于成像雷达、远程前向雷达,但也可用于角雷达和中央处理雷达架构,最多支持16个MIMO(多输入多输出)通道。同时,也可以通过级联方式实现更高的通道数和更好的分辨率。
而作为另一家老牌雷达芯片方案提供商,英飞凌也在去年发布了下一代基于28纳米CMOS技术的76-81GHz雷达MMIC系列,第一款产品RASIC CTRX8181收发单元,改进的信噪比(SNR)和收发器的线性度提供了高系统级性能和功能扩展性,来适配新的软件定义汽车架构下的传感器配置灵活性。
同样4发4收的信号通道,将标准测距范围增加了25%(从250米增加到300米以上)。更高的RF通道数和改进的线性度使垂直及角度分辨率提高33%,从而实现不同物体之间更好的分离,如行人与车辆之间。
更大的优势来自于英飞凌的MCU组合。新的CTRX产品系列,可以与英飞凌主流的AURIX微控制器TC3x和即将推出的TC4x来进行适配,两者都具有集成信号处理单元(SPU)和非易失性存储器。这有助于在域控制器架构上,进一步降低开发成本以及提升数据处理的效率。
从市场数据来看,毫米波雷达前装市场仍处于高速增长周期。
高工智能汽车研究院监测数据显示,今年1-11月中国市场(不含进出口)乘用车前装标配搭载前向毫米波雷达交付上险755.53万颗,同比上年同期增长23.71%;盲区角雷达交付上险819.06万颗,同比上年同期增长40.51%。
同时,包括英飞凌、为升科等厂商也在强力推动舱内监测雷达(主要三种方案,传统24/77Ghz、60Ghz以及4D成像技术)的上车。
比如,为升科(Cubtek)在舱内感知方案中提出了3D云图架构,不需区分是否为呼吸或是心跳讯号,而是将所有微动作之部位皆呈现,并由对象判断算法形成立体判断,进而增进正确率(高达95%以上)。
目前,这家公司已经推出的车规级60GHz舱内生物探测雷达,拿下了国内前五大品牌乘用车其中一家的多款车型量产订单。该公司预计,随着法规的陆续推进,未来几年搭载舱内生命探测雷达的新车数量将大幅增长。
此外,前装定点监测数据显示,到目前为止,包括上汽、比亚迪、理想、吉利、红旗、长安等多个品牌已经定点或上车4D成像毫米波雷达。
同时,一些品牌车型也在加快盲区雷达的上车速度。而上游芯片方案的成熟度以及开发难度降低,车企也有了更多的可选项,并且在成本以及定制开发上提供超过以往的灵活性。
高工智能汽车研究院预测数据显示,今年中国市场乘用车前装标配搭载毫米波雷达(含前向、盲区)交付将超过1800万颗,同比增长将超过30%。3R、5R配置,仍将是未来几年市场的主力,同时4D雷达进入快速成长期。
比如,为升科(CubTEK)已经基于NXP的多颗级联TEF82xx雷达射频芯片及结合S32R45雷达处理器芯片,推出了4D成像雷达方案。
该4D成像雷达方案最大的亮点在于率先提供了短距、中距、长距三合一的并发多模雷达感测,可以实现360度环绕感知以及汽车周围宽广视场的同时感测,从而满足L2+级至L5级的自动驾驶需求。
同时,这款4D成像雷达配备了高角度解析演算法、辨识环境目标的AI算法、新式信号处理算法等,并且通过配置低复杂度传感器实现了192个虚拟天线通道,来提高原始传感器硬件的性能,同时实现多传感器的前融合和点云融合,从而降低漏检率、误报率等。
高工智能汽车研究院认为,目前市场需求和相应的法规(比如,欧洲正在推动舱内感知的标配)已经明朗,接下来在具体落地方案上将是相互比拼的阶段,不同类似感知方案各自具有优势,最终车企会在硬件成本、传感器复用以及算法成熟度等层面作出选择。