问题陈述
给定点云数据、机械手的几何参数,抓取位姿检测问题( grasp pose detection problem)表示为,在抓手闭合情况下,识别抓手的配置的问题。
![]() :机器人工作空间
:机器人工作空间
![]() :三维点云中的一组点,由一个或多个传感器感知的
:三维点云中的一组点,由一个或多个传感器感知的
我们假设云中每个点都与该点的一个视点配对,由![]() ,其中
,其中![]() 代表一组视点
代表一组视点
我们将![]() 作为视点点云(ps.拥有某个视点观察角度的点云)
作为视点点云(ps.拥有某个视点观察角度的点云)
定义1
1、二指手:双指手可以由两个接触面来模拟,这两个接触面沿着一维流形相互靠近和远离。
因为只允许二指手,由于我们只允许使用两只手指的手,因此手相对于物体的 6-DOF 姿势足以计算出手指接触的位置,而手指接触的位置则是手相对于物体以给定姿势闭合时的位置。因此,只需给出 6-DOF 手部姿态,就能评估是否存在抓握动作。
问题陈述
输入视点云、ROI、二指抓手。目的是找到一组或更多6自由度抓手,其中抓手在闭合时满足力闭合。
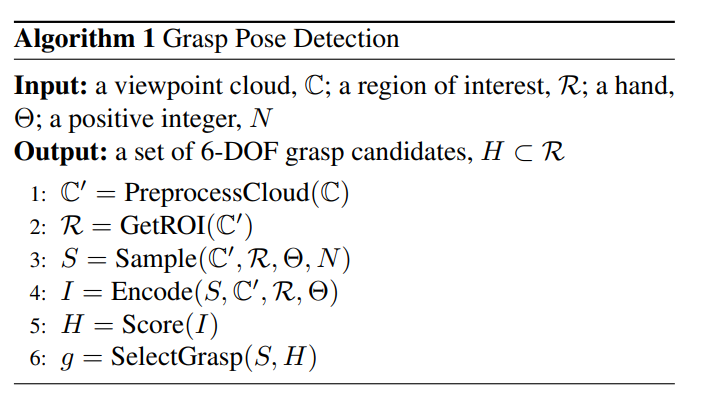
任何减少点云噪声和错误的操作都是step1中进行。
Step2找到ROI,不用把物体从背景中分割出来,ROI应该包括一组或更多物体
Sampling
Step3.找到满足一定数量的六自由度候选抓取。这一步我们希望抓手尽可能均匀分布在物体表面的可抓取部分。
我们将![]() 表示为一个抓手,
表示为一个抓手,![]() 表示手完全张开始占用的体积。
表示手完全张开始占用的体积。
定义![]() 为闭合区域,即手闭合时扫过的体积
为闭合区域,即手闭合时扫过的体积
根据上面定义,我们对抓取候选进行一定限制:

采样过程为:
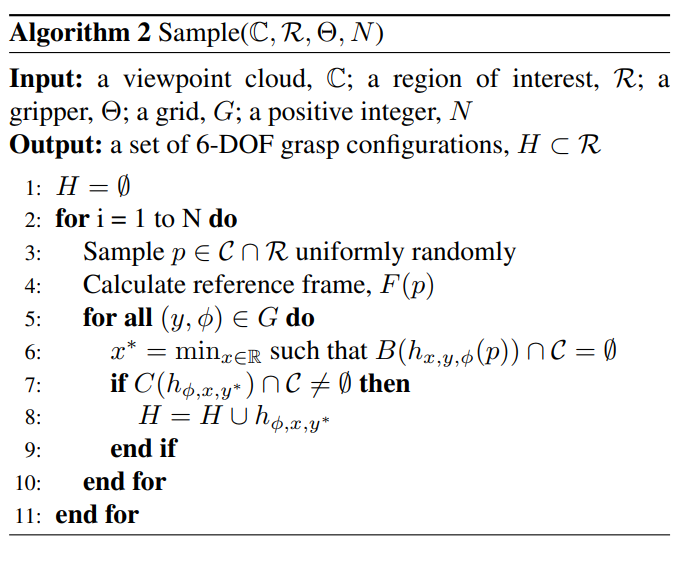
首先,从![]() 中机采样N个点,即抓手与ROI区域相交的那部分点云(就是夹爪内部点云)
中机采样N个点,即抓手与ROI区域相交的那部分点云(就是夹爪内部点云)
然后,对于每个采样的点云。我们计算p出局部参考框架的矩阵的特征向量(we calculate a local reference frame at p by evaluating the Eigenvectors of the matrix),即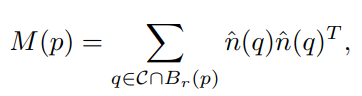 。
。