摘 要
电动机大量使用在现在工业生产和我们的日常生活中。但在实际的使用过程中,电动由于各种各样的原因经常出现故障导致电机损坏。因此保证电动机的正常运行十分必要。随着电机保护技术的迅速发展,智能电机保护器应运而生。智能电机保护器在今后的生产生活中有广泛的应用前景。因此研究智能电机保护器具有十分重要的意义。
本文首先根据电机故障种类的不同对电机保护原理进行分析,认真研究了电机的各种故障的保护原理。随后在此基础上设计智能电机保护器。本电机保护器设计选用AT89S52单片机芯片为主控制器;使用TLC549芯片设计A/D转换模块完成电流、电压信号的模拟量输入;使用TLC5620芯片设计D/A转换模块实现模拟量信号输出;通过ZLG7290芯片构建显示键盘模块实现人机交互功能;通过时钟芯片PCF8563T设计时钟使在电机保护器系统掉电后,时钟模块仍可以通过单独的电源供电继续工作;并通过24系列EEPROM芯片设计片外存储器扩展模块实现参数记忆功能。
本设计的智能电机保护器是以单片机为主控制器,具有编程方便的优点,同时本设计的智能电机保护器还具有保护功能全面,性价比高等优点。
关键词:电机保护器;电机保护原理;电机故障诊断;单片机
Design of The Intelligent Motor Protector Using Microcontroller
Abstract
Motors are widely used in industrial production and our daily life.But in the actual use of the process, because of a variety of reasons,the electric often fails, resulting in damage to the motor.So it is necessary to ensure the normal operation of the motor.With the rapid development of motor protection technology, intelligent motor protector appeared.In the future production and life, intelligent motor protector has a wide range of applications. Therefore, the study of intelligent motor protection is very important.
In this paper, the principle of motor protection is analyzed according to the different types of motor faults, and the protection principle of various faults of motor is carefully studied.Then on this basis, the intelligent motor protector is designed.In the hardware design, the motor protector selection AT89S52 microcontroller chip as the core processor.The motor protection device using TLC549 chip to complete the current, voltage signal A / D conversion. The motor protector achieve the output of analog signal by using TLC5620 chip to complete the D / A conversion. In order to achieve human-computer interaction, the motor protector using ZLG7290 chip to build display keyboard circuit.The motor protector uses the clock chip PCF8563T to design the clock module.After the motor protector system is powered down, the clock module can continue to operate by separate power supply.Motor protector design memory expansion module to achieve parameter memory function by using the 24 series EEPROM chip.
The design of the intelligent motor protector is based on single-chip controller.The intelligent motor protectorthe advantages of convenient programming.The design of the intelligent motor protector has comprehensive protection, cost-effective advantages.
Key Words:Motor protector;Principle of motor protection;Diagnosis of motor fault;
Microcontroller
目 录
摘 要 I
Abstract II
1 绪论 1
1.1 电机保护器的意义及发展现状 1
1.2 本设计主要研究内容 3
1.3 小结 4
2 电机保护技术原理 5
2.1 电机的综合保护理论 5
2.1.1 对称故障的电机保护理论 5
2.1.2 不对称故障的电机保护理论 6
2.2 电机故障类型 8
2.2.1 起动超时保护 8
2.2.2 过压与欠压保护 9
2.2.3 堵转保护 9
2.2.4 过载保护 10
2.2.5 短路保护 11
2.2.6 断相保护 11
2.2.7 不平衡保护 12
2.2.8 接地保护 12
2.3 小结 13
3 智能电机保护器系统设计 14
3.1 系统总体设计 14
3.2 振荡与复位电路 19
3.2.1 振荡电路 19
3.4.2 复位电路 19
3.3 开关量输入输出模块 20
3.3.1 开关量输入模块 20
3.3.2 开关量输出模块 21
3.4 模拟量输入输出模块 23
3.4.1 模拟量输入模块 23
3.4.2 模拟量输出模块 25
3.5 时钟模块 27
3.6 参数记忆模块 29
3.7 显示键盘模块 32
3.8 通讯模块 34
3.9 电源模块 35
3.10 保护器与电机的连接 35
3.11 小结 36
结 论 37
参 考 文 献 38
附录A 电机保护器系统总体电路图 39
致 谢 40
1 绪论
1.1 电机保护器的意义及发展现状
三相异步电动机广泛的应用在大多数现代工业生产以及我们的日常生活中,其原因是具有价格便宜、构造简单、便于安装,机械性能够满足绝大多数生产要求等优点。电动机作为目前大量使用的动力设备之一,为绝大多数机电设备提供动力支持,对国民经济发展起到十分重要的作用。在现在工业社会中,由电动机提供的动力占所有动力来源的80%以上[1]。电机的使用量与需求量随着国民经济的增长而不断增长[2]。电机能够携带很多种类的负载,这些负载大多数情况下都是在生产过程中起到关键作用的设备。电动机在实际运行的过程中经常发生故障,这是由电网电压不稳定、操作人员操作失误、电动机周围环境恶劣等原因造成的。一旦电动机在工厂的生产过程中发生故障,轻则会引起动力和电力系统的服务中断,从而使全部的生产计划被打乱;重则会造成电机烧毁以及后果更加严重的事故,从而造成更大的经济损失[2]。据统计,中国每年使用的大型电动机有2000万台左右,其中每年因为故障而损坏的电动机超过20%,为400万台左右,假设每台损坏的电动机平均维修费用为1000元,那么维修电动的总费用大概为40亿元[3]。此外,其他由电动机故障引起的事故会造成更加严重的间接经济损失[4]。综上所述,研究如何稳定有效的保护电机正常运行具有保护经济的平稳发展的意义。
电机是否安装电机保护器是导致电机是否容易损坏很关键的原因。目前市面上有很多种类的电机保护器,然而这些保护装置有诸多不完善的地方,不能对电机进行及时、有效的保护。总体来说这些电动机保护器有两个方面的不足,一方面是智能化水平较高但是具有较高的价格和较大的体积导致其难以被推行,另一方面是价格低廉但是智能化程度低,不能及时、有效地判断故障并进行相关的保护,导致电机经常出现异常的运行状况,影响电动机平常的工作,目前大多数生产现场已放弃对这类保护装置的使用[5]。
综上所述,设计出一款能够及时、准确地检测出故障并且能够根据故障现象采取有效的保护措施,同时具有全面的保护类型、较快的响应速度、较高的灵敏度、安全稳定、便于安装等优点的智能电动机保护器,就变得非常重要。
电机保护技术的发展按照时间上来说可以分成熔断器、热继电器、电磁式继电器保护阶段、模拟电子式电动机保护器阶段和智能化电动机保护器阶段三个阶段。
(1)熔断器、热继电器、电磁式继电器保护阶段
熔断器是最早使用的电机保护器,但是熔断器只能用于短路保护。电机在运行过程中出现短路故障时,通常会使得相间的熔断器烧坏,从而达到保护电机的作用。由于熔断器只能用于短路保护,因此IEC 标准规定,在需要安装熔断器的电机场合,必须与断相保护配套使用[6]。
国内最早使用的热继电器是在1953年从苏联进口的。之后在半个多世纪的时间以来都大量使用热继电器来保护电机,直到 1996 年才将其淘汰。热继电器的原理是运用电流通过元件时所产生的热量造成金属片弯曲引起脱扣装置运行从而达到保护电机的目的。热继电器具有结构简明、应用便利、价钱低廉等优点。但是它本身的缺点也十分严重,热继电器具有功能单一、精确度不高、误差明显、稳定性差、容易受到环境干扰等缺点,并且热继电器不具备电机起动超时保护等功能。电机绕组会在电机发生堵转、过载等故障时产生热量积累。热继电器不能对电机绕组温度过高的情况进行保护的原因是热继电器连接在主电路中,不能测量电机绕组的温度[7]。在保护电机的过程中热继电器需要使用很多的电能,当热继电器保护电机运行几次后,热继电器上的绝缘材料和电阻丝等部件就会因过热而急速损毁,热继电器就无法继续运行[8]。综合上述的热继电器的缺陷看来,热继电器被淘汰是必然的结果。
电磁型继电器是以电机发生故障前后电流量的变化作为判断依据。目前,仍有一部分采用以电磁型继电器为主的保护方式的电机保护装置存在与我国的电网中。绝大多数电磁型继电器在电机运行中采用电流速断保护方式或定时限过流保护方式,另外也有一定数量的电磁型继电器使用一次过流保护的方式。根据三相异步电动机的起动特性,为了防止电磁性继电器存在误动作,电磁型继电器使用时需要满足电动机在正常起动时不出现误动作,这些电磁型继电器的动作电流值的设定都需要避开电机的正常起动电流,这样得到的动作电流值要比需要保护的电机额定电流大很多,这样造成电磁型继电器检测电动机堵转等故障时的灵敏度降低,增加了电动机损坏的可能性。综上所述,电磁式继电器型的电机保护器通过降低电机保护器的灵敏度来提升系统的可靠性[9]。
(2)模拟电子式电动机保护器阶段
在上个世纪七八十年代,半导体得到了迅速发展,在这期间电机保护器也得到了迅速发展,出现了一批具有多种保护种类的电子式电机保护器,可以相对稳定有效的保护电机。其中以模拟电子式电机保护器最为典型,这类装置的式样繁多,规格齐全。电子式电机保护器大致上可以分成温度保护、综合保护(多功能保护)、断相保护三种类型[2]。电子式电机保护器的优点有动作速度快、功能多样化、功率损耗低等[10]。但它仍存在采样精度低、整定精度低、保护功能不齐全,无法实现对不平衡故障等不对称故障进行保护等缺点。
随着自动化程度不断的提高,生产技术不断的发展,生产现场对电机保护器的要求也越来越高。生产现场希望电机保护器性能可靠、功能多样化、界面直观、体积小,接线简单,这些都是模拟电子式电机保护器无法实现的[11]。
(3)智能化电动机保护器阶段
智能化电机保护器是计算机技术和微电子技术结合的产物,具有保护、通讯、远程测量和远程控制等功能。智能化电机保护器具有配合多种类型的传感器进行实时测量的功能,同时对电机过载、堵转、短路、欠压、过压、断相、三相不平衡等故障进行判断并进行保护,真正实现了智能检测和控制。智能化电机保护器可以通过连接到计算机来实现远程测量和远程控制等功能,同时可以将大量的数据保存到计算机中。另外,智能式电机保护器适应性强,只需要通过修改软件就可以轻易地实现各种电机保护器的功能,包括了市面上通用机械类保护器和各种专用保护器。智能式电机保护器优点有集成程度高、体积小、保护功能良好、电能损耗低、灵敏度高、便于安装、调试简单等[2]。综上所述,智能式电机保护器具有诸多优点,给电机保护器之后的发展指出了明确方向[9]。
目前,国外己经有很多智能化电机保护器投入生产使用。例如西门子公司的可提供过载、断相和三相电流不平衡保护的过载继电器,富士公司的具有过载、断相和反相保护的继电器,以及韩国三和株式会社的能提供过载、起动电流、三相电流不平衡、断电保护和自我监控等功能的继电器[12]。而我国智能型电机保护技术很晚才开始发展[9]。我国研制的智能电动机保护器仍然处于初级阶段[13]。
未来电机保护器技术将会按照以下两个方向发展:一方面是加强对新理论的研究,通过建模和仿真,并引入对称分量、阻抗量等检测量作为判断依据,在电机保护技术范围内引入小波分析和神经网络等算法,这样不仅能对电机保护技术理论研究方面有很大的促进作用,而且也大大提高了保护控制装置的性能[14]。另一方面是要推进技术的开发,使用传感器对电机进行24小时监控,随后将监控到的数据分析并确定故障类型,采取相应的保护措施,这样就能提前防止电机故障的发生,提高了电机运行时的安全性[15-17]。
1.2 本设计主要研究内容
本设计的主要研究工作是研究学习电机保护技术的原理,并在此基础上结合单片机技术设计系统硬件电路,以硬件电路为基础编写相关的软件程序,实现上述所提出的的设计要求。
本设计在理论方面对电动机的起动超时、过压、欠压、过载、堵转、短路、断相、不平衡、接地等故障进行理论分析和研究,设计电动机保护器针对电动机各种故障的保护方程。
本设计在系统设计方面选用AT89S52芯片作为主控制器,以其为主控制器设计电机保护器的其他模块。本设计电机保护器具有4路开关量输入和4路开关量输出;通过模拟量输入模块来进行电流电压的采样;通过模拟量输出模块实现模拟量输出。电机保护器通过显示模块使保护器具有显示电机故障相关的信息以及电机运行状态等相关参数的功能;通过键盘输入模块使保护器具有参数修改功能。电机保护器通过EEPROM来存储相关的故障信息。同时电机保护器配有时钟模块,在系统掉电后时钟模块仍可以通过单独的电源供电继续工作,省去每次断电后重新设置时间日期。此外配置通讯模块,实现电动机保护器与计算机之间的连接,方便对电机保护器系统的调试。
论文章节安排如下:
第一章对智能电机保护器的研究意义和研究背景进行阐述,并介绍了本设计的主要研究内容。
第二章首先根据电机故障种类的不同对电机保护原理进行介绍,接下来详细的介绍了电机的各种故障。
第三章首先阐述了电机保护器系统设计方面主要思路,接下来介绍电机保护器各个模块的硬件电路和部分软件程序。
1.3 小结
本章节首先明确了研究电机保护器的意义。接下来在此基础上,对电机保护技术的发展按照时间顺序进行了介绍。同时阐述了本设计的设计要求主要研究方案,最后对本文章节作了整体的安排。
2 电机保护技术原理
电动机在发生故障时,其故障形式主要有:绕组损坏和轴承损坏,其中导致电机绕组损坏的原因有如下所示的几个方面:
(1)由于电源电压过低,导致电动机不能启动或者电动机启动后不停地跳闸,长时间运行,就会使得热量不断增加,烧坏电动机绕组。
(2)由于电动机长时间的运行,导致绕组老化损坏,定子绕组和转子绕组之间发生相关的短路。
(3)由于所带负荷过大或电机自身机械问题导致电动机转子堵转。
(4)由于从变电所分配出来的电压受到天气和环境的影响,导致工业现场电压不稳定,就使得电动机上的电压不稳定,从而导致电机绕组损坏。
由于电机保护器主要是针对电动机的运行状态进行监控测量,所以本设计主要考虑绕组方面的故障。电机绕组方面的故障分为对称故障和不对称故障。
电机的对称故障主要包括过压、欠压、堵转、过载、短路等故障。对称故障的特点是三相电流波形大致对称,但电流值波动较大。电机发生对称故障时,电机电流会急剧升高,导致电机热量积累,绝缘降低从而烧毁电机。所以,我们可以通过检测电流幅值的显著变化来判断是否有对称故障发生,并加以保护,这种以电机通过的电流幅值变化作为判断依据的保护理论称为过流保护。电机发生对称故障时通常根据过流保护理论来进行判断并加以保护。
电机的不对称故障主要包括断相、三相不平衡、接地漏电等故障。电机发生不对称故障是可以通过Fortescue所提出的对称分量法来进行判断并加以保护。关于对称分量法,在本文的2.1.2小节会进行详细的讲解。
2.1 电机的综合保护理论
2.1.1 对称故障的电机保护理论
传统的电机保护器大多数根据过流保护理论来诊断电机故障。过流保护基本原理是通过检测电机电流大小是否明显增加来判断电机是否有故障出现及故障的类型。传统的电机保护器只能对以电流显著提高为主要特征的对称故障包括过载、堵转、短路等进行保护,对断相、不平衡、接地等不对称故障无法进行有效的保护。
不能根据过流保护理论来诊断不对称故障的原因如下:
(1)电机发生不对称故障时,电机电流一般不会明显增加。
(2)电机发生不对称故障时,电机电流产生的负序电流分量,从而产生负序电流效应,引发电机端部有热量积累、电机转子晃动、电机起动力矩降低等问题。
(3)电机起动过程中的电流值有时会超过电机的故障电流,传统电机保护器难以准确的判断电机正在起动还是电机出现故障,这样导致传统电机保护器在保护电机的过程中经常出现问题,影响电机的正常使用。
由于过流保护理论无法诊断不对称故障,本文接下来介绍对称分量法用来诊断电机的不对称故障。过流保护和对称分量法共同构成了本设计电机保护器的理论依据。
2.1.2 不对称故障的电机保护理论
在1918年,加拿大电气学家Fortescue提出对称分量法。对称分量法是判断对称系统出现不对称运行故障的一种基本方法。对称分量法较多的应用在三相电机发生不对称故障的情况下[9]。
对称分量法基本原理是指任何三相不平衡的电流、电压都可以分解为三个平衡的相量成分,即正序分量、负序分量、零序分量[18]。其中,正序分量的大小相等,相位按顺时针方向依次相差120°;负序分量的大小相等,相位按逆时针方向依次相差120°;零序分量的大小相等且同相。用向量图来表示对称分量法如图2.1所示。
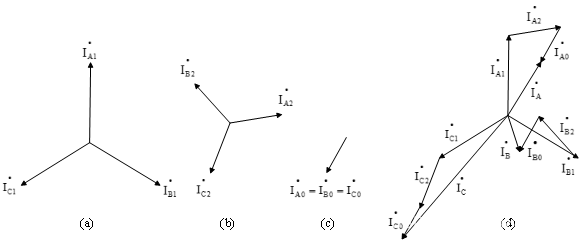
(a)正序电流分量向量图 (b)负序电流分量向量图 ©零序电流分量向量图 (d)各相序合成向量图
图2.1一组三相不对称电流与分解成的三组对称分量之间的关系图
用A、B、C来表示三相不平衡电流,根据对称分量法可以将A分解为正序、负序、零序分量A1、A2、A0。同理,也可以将B分解为正序、负序、零序分量B1、B2、B0;将C分解为正序、负序、零序分量C1、C2、C0。既有:A=A1+A2+A0,B=B1+B2+B0,C=C1+C2+C0,其中,三相电流的正序分量分别为A1、B1、C1,大小相等,相位按顺时针方向依次相差120°;负序分量分别为A2、B2、C2,大小相等,相位按逆时针方向依次相差120°;零序分量的依次为A0、B0、C0,大小相等且同相。
各组相序成分值大小相等,所以可以将其简化,用某一相量表示。定义算子“a”为使相量逆时针旋转120°的单位相量。由此可以得出式2.1:
(2.1)
式2.1以A相为代表,将A1、A2、A0各符号进一步简化为1、2、0,故式2.1可以改写成式2.2:
(2.2)
将式2.2中的三相电流相加,可得出式2.3:
(2.3)
因(1+a+a²)=0,因此得到式2.4:
(2.4)
同理,可以求得正序分量和负序分量1、2。综上所述,即得到式2.5:
(2.5)
由式2.4可知,当三相电流之和不为零时才有零序电流存在。当三相电机系统按照三角形接法或者没有中性线的星型接法连接时,三相电流之和恒等于零,因此不会有零序电流存在。当三相电机系统按照有中性线的星型接法连接时,才会有零序电流出现。在本设计的电机保护器中,零序电流是判断电机是否存在接地故障的重要依据。本设计的电机保护器的应用对象是三相四线制电力系统中的电动机。
2.2 电机故障类型
2.2.1 起动超时保护
电流电流从零值瞬间升高到 0.06In(In为电机额定电流)时为电机起动开始的时刻,当电机电流经过峰值后逐渐降低至1.2In时为电机起动结束的时刻,从电机起动开始到电机起动结束为止所经过的时间长度被称为电机的起动时间。
在电动机的起动过程中,电机转差率 s=1,导致电机起动电流很大。电机起动电流是电机额定电流的 6至7 倍左右。之后随着电动机转速的提高,转差率逐渐降低,电流也逐渐接近电机额定电流。但是如果电机长时间处在起动过程中,起动电流很大,导致电机过热,绝缘降低而烧毁电机。
起动超时保护是指电机在起动过程中达到系统设定的起动时间时,电机电流依然大于系统设定的起动超时保护动作电流的情况下,电机保护器停止电机运行来保护电机。若电机发生了起动超时故障,不能立即重新起动电机,而是需要经过一段散热的时间后,才可以重新起动电机。在电机正常起动的情况下,起动超时保护在电机起动结束的时刻自动退出。
起动超时保护的动作方程为:
(2.6)
(2.7)
其中,Iqd为起动超时保护动作电流;Tqd为起动超时保护设定的电机起动时间。
2.2.2 过压与欠压保护
(1)过压保护
过压故障由系统过电压和操作过电压这两种组成[18]。当电机发生过压故障时,电动电流迅速增大,导致电机热量积累,绝缘降低而烧毁电机。
过压保护是指当电机电压达到系统设定的过压保护动作电压时,保护器及时在系统设定的过压保护延时时间内动作,停止电机,避免电机烧毁。
过压保护的动作方程为:
(2.8)
(2.9)
其中,Ugy表示过压保护动作电压,大小是额定电压1.1至1.5倍左右;Tgy表示过压保护延时时间。
(2)欠压保护
电机转矩正比于电机电压的平方。电机在起动过程中电压过低会导致电机转矩过小,影响电机起动。电机在运行过程中电压过低,导致电机转速和转矩过低,严重情况下甚至会造成电机停转。上述两种情况都会造成电机电流过大,使得电机内部产生热量积累,最终烧毁电机。
欠压保护是指在电机电压低于欠压保护动作电压时,电机保护器在系统设定的欠压保护延时时间内动作,停止电机,避免电机烧毁。
欠压保护的动作方程为:
(2.10)
(2.11)
其中,Uqy表示欠压保护动作电压,大小是额定电压的0.5至0.9倍左右;Tqy表示欠压保护延时时间。
2.2.3 堵转保护
堵转故障是指电机在运行过程中,由于电机所带负载过大或电机机械故障等原因导致电机轴被卡住。如果未能及时解除故障,电机则会产生很大的电流,从而导致电机过热,绝缘降低而烧毁电机。
堵转保护是指当电机电流达到系统设定的堵转保护动作电流时,保护器及时在系统设定的堵转保护延时时间内动作,停止电机,避免电机烧毁。
堵转保护的动作方程为:
(2.12)
(2.13)
其中,Idz表示堵转保护动作电流,大小是额定电流的 4至6 倍左右;Tdz为堵转保护延时时间。
2.2.4 过载保护
过载故障是指当电机在过负载情况下,会产生较大的电流,电机可以短时间运行,长时间超过其额定电流运行的话,会导致电机积累热量,绝缘降低而烧毁。
由上可知,电机长时间工作在较大的负载情况下,容易损坏,过载保护就是为了防止这种情况的出现。当电机电流达到系统设定的过载保护动作电流时,保护器应及时在系统设定的过载保护延时时间内动作,停止电机,避免电机烧毁。
过载保护的类型由定时限保护和反时限保护两种保护类型组成。如果选用定时限保护类型,则不考虑过载电流的大小,电机的过载保护延时时间均是固定的;如果选用反时限保护类型,则需要考虑过载电流的大小,过载保护延时时间随着过电流的大小的变化而变化,过电流越大,过载保护延时时间越短。反时限保护类型符合绝大多数电机保护器的要求,因此被大量使用[19]。国际电工委员IEC2553规定了几种标准反时限特性曲线,其中曲线公式如下所示[20,21]。
普通反时限公式:
(2.14)
非常反时限公式:
(2.15)
超反时限公式:
(2.16)
其中,t表示延时时间,TP表示系统整定常数,I表示采样电流,IP表示反时限电流整定值。上述三种反时限曲线主要应用于线路保护。本设计选用的是超反时限特性保护。
过载保护动作方程为:
(2.17)
(2.18)
其中,Igz为过载保护动作电流,Tgz为过载保护延时时间。
2.2.5 短路保护
短路故障是电机最严重的故障之一。当电机出现短路故障时,电机电流过大会导致电机内部热量积累,最终烧毁电机。因此当电机电流大于系统设定的短路保护动作电流时,保护器应立即执行保护动作,停止电机。
短路保护动作方程为:
(2.19)
(2.20)
其中,Idl为短路保护动作电流;Tdl为短路保护延时时间。
2.2.6 断相保护
断相故障是造成三相异步电机损坏的主要原因之一。据不完全统计,断相故障造成的电机事故占总体电机事故的45%左右。当电机发生断相故障时,电动机转速会降低,断相绕组电流为零,未断相绕组的电流迅速升高,造成电动机过热,最终烧毁电机。
电动机断相故障的原因如下:
(1)在三相异步电动机按星型连接的情况下,连接某相绕组的电源线断开或者某相绕组断开。
(2)在三相异步电动机按照三角形连接的情况下,连接某相绕组的电源线断开。
特别需要注意的是,在三相异步电动机按三角形连接的情况下,电机的某相绕组断开,此时电机断相绕组的线电流不等于零,对于这种情况无法用断相保护来保护电机。但此时电机的三相电流是三相不平衡电流,因此可以通过不平衡保护来保护电机。
断相保护是指当电机电流达到系统设定的断相保护动作电流时,保护器及时在系统设定的断相保护延时时间内动作,停止电机,使电机运行更加安全。
断相保护的动作方程为:
,, (2.21)
(2.22)
其中,Tdx为断相保护延时时间。
2.2.7 不平衡保护
在电机产生故障的情况下,电机故障为不平衡故障的几率较高。当电机发生不平衡故障时,电机电流为三相不平衡电流,三相不平衡电流会产生负序分量,影响电机的正常工作。
不平衡保护是指在电机工作过程中,三相不平衡率达到不平衡保护动作值时,电机保护器在不平衡保护延时时间内动作,发出报警信号或者停止电机,这样使电机运行更加稳定可靠。三相不平衡率是指三相不平衡电流中线电流最大值和线电流最小值的差值与三相不平衡电流中线电流最大值的比值。三相不平衡率计算方程如下 :
(2.23)
其中,Imax为三个线电流中的最大值;Imin为三个线电流的最小值。
不平衡保护的动作方程为:
(2.24)
(2.25)
其中,αbph 为不平衡保护动作值;Tbph为不平衡保护延时时间。
2.2.8 接地保护
在电机的运行过程中,接地故障是由电机受潮、绕组绝缘性降低以及有肢体接触等因素引起的。无论电机采用中性点接地方式还是采用中性点不接地方式,中性点不接地方式有着较大的分布电容,电机一旦发生接地故障,都会造成电机绕组中有热量积累,最终烧毁电机。
根据上面提到的对称分量法理论,当电机发生接地故障的情况下,三相电流中有零序分量。即电机保护器通过零序电流互感器可以检测到零序电流,零序电流大多数情况下应大于0.1A。当系统检测到零序电流大于接地保护动作电流时,电机保护器应立即控制继电器动作,停止电机,提高电机工作的安全性。
接地保护的动作方程为:
(2.26)
(2.27)
其中,Ijd为接地保护动作电流;Tjd为接地保护延时时间。
2.3 小结
本章节首先根据电机故障种类的不同对电机保护原理进行介绍。接下来对电机的各种故障保护进行了详细的讲解并给出了故障保护方程,为第三章的系统设计打下了理论基础。
3 智能电机保护器系统设计
3.1 系统总体设计
电机保护器系统设计是电机保护器设计的关键,对实现本设计电机保护器的功能有十分重要的意义。
本设计的硬件电路是选用AT89S52单片机芯片作为电机保护器的中央处理器主控制器,与主控制器相连接的电路模块有模拟量输入模块、模拟量输出模块、开关量输入模块、开关量输出模块、键盘显示模块、时钟模块、存储模块以及电源模块。系统的硬件原理框图如图3.1所示。
本次的硬件方面的设计思路为,电机的三相电压、三相电流和零序电流信号经采样后送到放大保持电路,之后再经过A/D转换电路送到单片机AT89S52片内,并与系统设定的故障保护动作值相比较,诊断电机是否有故障产生,如果诊断出电机有故障产生,则系统会同时进行电机故障类型判断。当系统诊断出电机有故障出现时,单片机通过开关量控制继电器来执行跳闸或报警动作以实现对电机的保护,同时通过显示电路显示故障信息并记录在EEPROM中。本设计电机保护器还可以通过键盘输入电路设置额定电压、额定电流、电机起动时间等各种电机保护参数,从而可以实现对不同种类的电机进行保护。
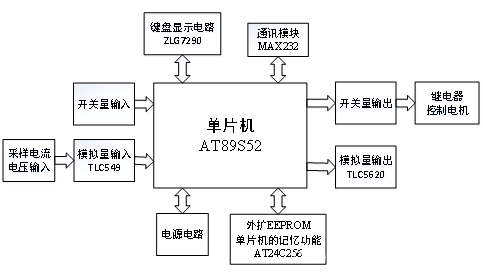
图3.1 硬件原理框图
本设计软件方面选用C语言来进行编程。C语言是一种结构化的语言,它在可读性和移植性两方面比其他语言要好。本设计软件方面选用的编程工具为Keil C51。本次设计的软件编程是在Keil u Vision 4中进行的,Keil u Vision 4的界面如图所示。本设计通过将软件编译后生成的Hex文件下载到AT89S52单片机芯片中的方式来对电机保护器系统进行调试。本次设计的主程序流程图如图3.2所示。
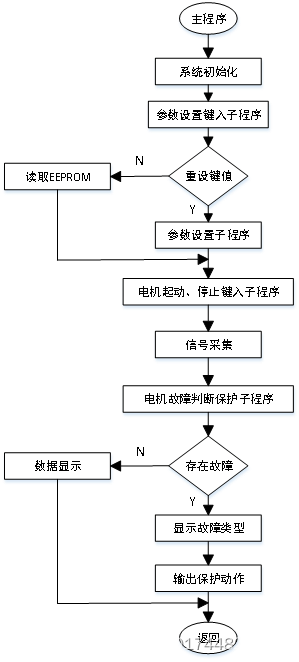
图3.2 主程序流程图
主程序设计是电机保护装置软件设计的核心,其设计的合理性会影响整个软件设计。主程序首先对系统的各个模块进行初始化设置,接着就进入 While 循环语句,先判断参数设置按键是否按下,如果参数设置按键按下,就进入数参数设置子程序,如果参数设置按键未按下,就读取 EEPROM 中的数据。接下来进入电机启动、停止键入子程序来控制电机的启动或停止。之后对三相电压、三相电流和零序电流信号进行采样。采样后进入调用的保护判断子程序,根据各保护条件来进行判断,如果存在故障,则显示电路显示故障的相关信息,同时并输出报警动作和保护动作,对电机进行保护,如果不存在故障,则显示电机的基本参数信息。
参数设置子程序流程图如图3.3所示。进入参数设置子程序时,通过上述ZLG7290键盘显示电路中设计的4个按键来进行参数修改。通过向下按键来选择要修改的参数,通过确认按键来选择参数进入修改,修改中通过向下按键修改参数大小,通过向右按键选择修改中参数的数位,通过再次按下确认键完成修改。按返回按键即退出参数设置子程序。
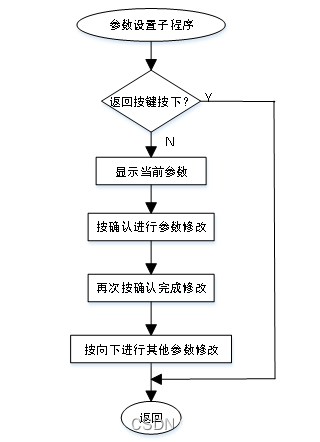
图3.3 参数设置子程序流程图
电机起动、电机停止子程序流程图如图3.4所示。
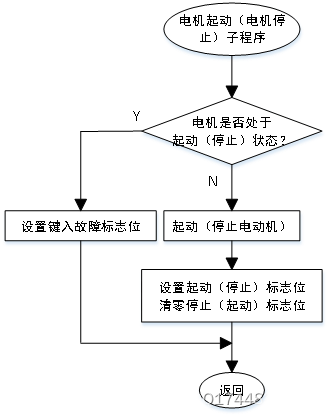
图3.4 电机起动、停止子程序流程图
电机故障保护子程序流程图如图3.5所示。电机故障保护子程序是用来判断电机是否发生故障及电机故障的类型,电机保护系统采取相应的动作,从而达到保护电机的目的。如果电机出现故障,则设置相应的故障标志位,随后通过显示电路显示故障类型并执行保护动作。如果电机无故障出现,则执行返回。
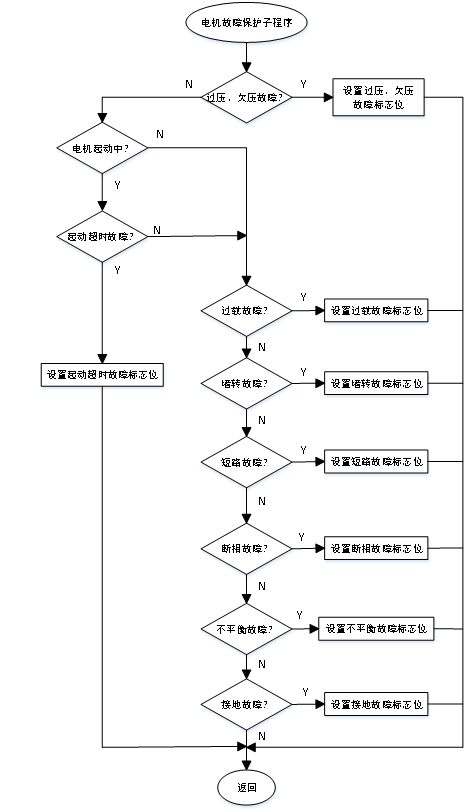
图3.5 电机故障保护子程序
3.2 振荡与复位电路
本设计选用现在被广泛使用的AT89S52单片机芯片作为主控制器,它兼容于MCS-51系列的单片机,具有可编程可反复擦除1000次以上的只读存储器,以便于系统的开发和参数的修改。尽管AT89S52是8位机,但其处理精度完全满足本设计的设计要求。AT89S52的最高频率可达到24MHz,但以12MHz运行时,其处理速度完全满足本设计要求。AT89S52芯片的主要的特点如下:
(1)内部程序存储器ROM:4KB自己的存储容量。
(2)内部数据存储器RAM:256B字节
(3)寄存器:设有4个工作寄存器区,每个区有R0~R7八个工作寄存器
(4)4个8为并行输入输出端口:P0、P1、P2和P3
(5)2个16为的定时/计数器T0、T1
(6)全双工的串行端口SBUF
(7)中断系统:设有5个中断源
(8)系统扩展能力:可外接64K的ROM和64K的RAM
3.2.1 振荡电路
AT89S52芯片内部有一个片内部振荡器,AT89S52的XTAL1、XTAL2两个引脚分别连接片内部振荡器的输入端和输出端。本设计通过将外接12MHz晶体控制振荡器接在XTAL1、XTAL2两个引脚上与片内部振荡器一起构成并联振荡电路。振荡电路如图3.6所示。
虽然对振荡电路中接地的两个电容大小没有绝对的要求,但电容的大小还是会影响振荡电路频率的大小、振荡电路的可靠性、振荡电路是否容易起振以及振荡电路是否耐高温。本设计选用的是30pf的陶瓷电容。
振荡电路的振荡周期定义为晶振频率的倒数,同时振荡电路的振荡周期即是AT89S52单片机的时钟周期。时钟周期是单片机中最小的时间单位,在一个时钟周期内,单片机只执行一条指令。本设计采用的是12MHz 的晶体振荡器,故AT89S52单片机的时钟周期为83ns。
3.4.2 复位电路
单片机复位的原理是,当单片机启动时,单片机的RST引脚上有能够持续2个机器周期(24个时钟周期)以上的高电平输入,则单片机就能够进行复位动作。单片机的复位电路的作用是为了保证单片以及系统各个部件在单片机每次启动时都从初始状态开始工作。复位电路是通过AT89S52单片机的RST引脚连接到芯片内部的施密特触发器。
单片机的复位电路有自动复位和手动复位两种。本设计选用的是手动复位。手动复位电路可以通过人为控制是否复位单片机。如复位电路电路图所示,如果按下按钮,则VCC上的高电平就会输入到单片机的RST引脚完成单片机的复位动作。因为按下按钮的动作速度就算再快,按钮仍会保持长达几十毫秒的接通状态,因此手动复位电路符合单片机复位所需要的高电平接通时间的要求。复位电路如图3.6所示。
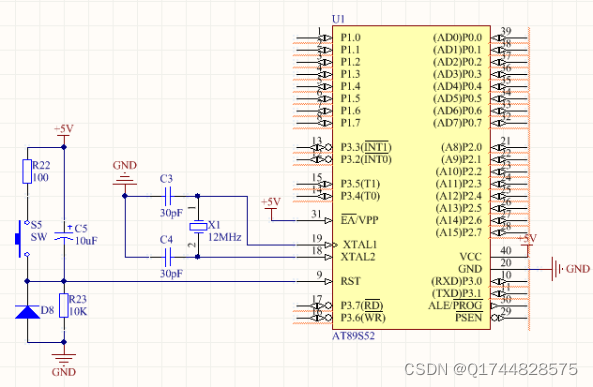
图3.6 振荡与复位电路
3.3 开关量输入输出模块
3.3.1 开关量输入模块
本设计有4路开关量信号输入,开关量输入模块电路如图3.7所示。开关量输入电路的作用是将24V电压信号通过光耦隔离器件变换为 主控制器可以接收的5V标准信号送入主控制器内部。 开关量输入通过使用电路光耦隔离器件还可以减少其他方面的干扰信号。这4个开关量分别代表电机起动1、电机起动2、点击停止、参数设置,4个开关量输入信号的作用如下:
(1)通过起动1、2两个开关量输入和起动1、2两个开关量输出可以实现电机不同的起动方式。
(2)通过电机起动、电机停止两个开关量的输入来控制电机的运行状态。
(3)通过参数设置的开关量输入来进入电机保护器系统参数设置状态。

图3.7 开关量输入模块电路
3.3.2 开关量输出模块
开光量输出模块电路如图3.8所示。开关量输出电路的重要性要高于开关量输入电路。开关量输出电路的作用是单片机通过开关量输出电路控制继电器动作以实现电机保护器的保护功能。本设计有4个开关量输出信号分别代表起动电机1、起动电机2、报警和脱扣,4个开关量信号的所用如下:
(1)通过起动1、2两个开关量输入和起动1、2两个开关量输出可以实现电机不同的起动方式。
(2)通过报警、脱扣两个开关量输出控制继电器实现电机保护动作中的报警、脱扣动作。
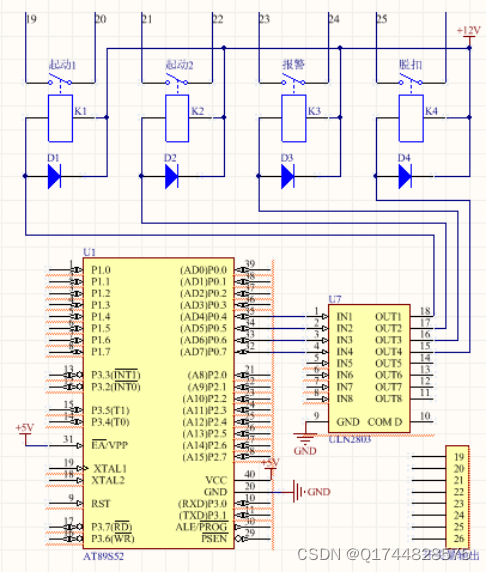
图3.8 开关量输出模块电路
本设计选用ULN2803芯片组成开关量输出模块。ULN2803具有八路NPN达林顿晶体管,ULN2803的原理图如图3.9所示。ULN2803用于连接低逻辑电平数字电路和较高的电流/电压,广泛应用在计算机、工业等领域。ULN2803的设计与标准TTL系列兼容。
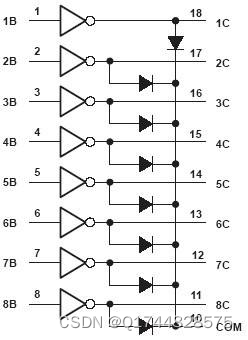
图3.9 ULN2803原理图
3.4 模拟量输入输出模块
3.4.1 模拟量输入模块
在本设计中,需要通过模拟量输入模块将三相电机的电压电流信号转换成标准信号送入主控制器中,以完成对电机故障的诊断。模拟量输入电路由信号检测部分、放大调幅部分和A/D转换部分构成。
通过直接检测电机的线电压可以得到三相电压信号。三相电流信号和零序电流信号由电流互感器和零序电流互感器检测得到,通过电流检测电路检测到的电流信号实际上均是电压信号,为了便于区分才称其为电流信号。由于三相电流检测过于简单,本文将其省略,本文接下来介绍零序电流检测。由对称分量法得知,零序电流向量方向与三相电流的向量和相同,大小为三相电流的向量和的1/3,因此检测零序电流就是检测三相电流的向量和。零序电流检测电路如图3.10所示。
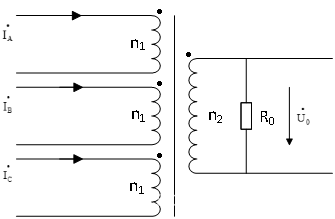
图3.10 零序电流检测电路
通过检测电路得到的电压进入放大调幅电路,从放大调幅电路出来经过A/D转换芯片后进入主控制器。本设计选用的A/D转换芯片为TLC549,放大调幅电路和A/D转换电路如图3.11所示。
TLC549是被广泛应用的CMOS 8位A/D转换芯片。该芯片有一个模拟量输入端口,三台的数据串行输入接口可以方便地和微处理器或外围设备连接。TLC549仅仅使用输入/输出、时钟和芯片选择信号来控制数据。输入时钟上限为1.1MHz。本设计共有7路模拟量输入,分别是三相电压、三相电流和零序电流,故需要7个A/D转换芯片TLC549。根据SPI接口标准,我们可以将这些芯片的时钟端和数字量输出端接在一起以减少占用的主控制器的引脚。
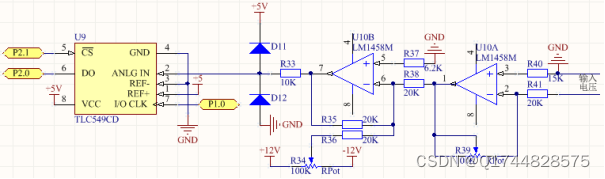
图3.11 模拟量输入模块电路
模拟量输入模块中TLC549芯片的A/D转换程序子程序如下:
unsigned char TLC549_ADC(void)
{
unsigned char i,tmp;
CS=1;//CS置高,片选无效
CLK=0;
CS=0;//CS置低,片选有效,DO输出最高位
nop();
nop();
for(i=0;i<8;i++)//数据移位输出
{
tmp<<=1;//tmp左移一位
tmp!=DO;//tmp与DO做或运算
nop();
CLK=0;
}
CS=1;//CS置高,片选无效
for(i=17;i!=0;i–) nop();//延时
return(tmp);
}
上述子程序的功能是将数据通过TLC549进行A/D转换后输出数据tmp到单片机中。该程序首先初始化引脚后进入循环依次输出数据到tmp。
3.4.2 模拟量输出模块
在本设计中,需要时实现0~20mA的模拟量输出,以方便相关的操作人员进行在线测量。本设计选用的是主控制器外接D/A转换芯片TLC5620,之后再通过放大保持电路来得到模拟量输出,模拟量输出模块电路如图3.12所示。
TLC5620芯片是4路8位的电压输出型数模装换芯片,具有高阻抗的参考电压输入结构,该D/A转换芯片输出的电压大小是1倍到2倍的参考电压,工作室仅需+5v供电,因此使用简单。TLC5620芯片具有上电复位功能,确保上电后D/A转换芯片运行的可靠性。TLC5620与主控制器之间采用简约的三/四线串行总线,11位的指令字包括了2位D/A选择位、一位范围选择位和8位数字位,一位范围选择位是用来选择输出范围是1倍还是2倍。TLC5620的内部采用双缓冲结构,便于控制。
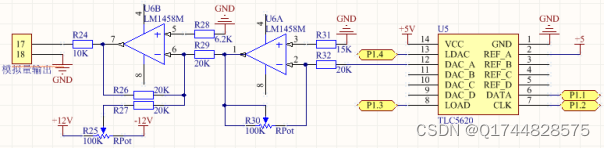
图3.12 模拟量输出模块电路
TLC5620芯片的D/A转换子程序如下:
void TLC5620_DAC(uint date)
{
uchar i=0,dat=0;
CLK=0;
LOAD=1;
LDAC=1;
nop();
nop();
for(i=0;i<3;i++) //向D/A芯片送数据位选择DAC_A通道和0倍增益
{
CLK=1; //CLK为高电平器件通过DATA送入数据位
nop();
nop();
DATA=0;
nop();
CLK=0;//CLK在下降沿数据被写入到D/A芯片
nop();
nop();
}
for(i=0;i<8;i++) //向D/A芯片送数据date
{
CLK=1;
nop();
nop();
dat=date&0x80;//变量date和0x80进行位与运算,变量date最左侧位(第一位)数据保留下来
if(dat!=0) DATA=1;
else DATA=0;
CLK=0;
nop();
nop();
date<<=1; //变量date向左移一位
}
nop();
LOAD=0; //LOAD在下降沿,输入的数据被锁存到输入锁存器
nop();
LDAC=0; //LDAC在下降沿,输入锁存器的数据被锁存到输出锁存器,有数据输出更新
nop();
LOAD=1;
nop();
}
上述程序的功能是数据date通过TLC5620进行D/A转换后从DAC_A通道输出。该程序首先初始化个引脚,之后进入第一个循环向D/A芯片输入数据位选择要输出的通道和输出放大的倍数,之后进入第二个循环向D/A芯片输入要输出数据date,之后从DAC_A通道输出。
3.5 时钟模块
本设计选用PCF8563T时钟芯片来搭建时钟模块。时钟模块的作用如下:
(1) 时钟模块的供电方式有电源供电和备用电池供电两种。在电机保护器停止运行后,时钟模块通过备用电池供电仍旧可以继续工作,这样每次电机保护器停止后重新运运行时不需要重复设置时间。
(2) 当电机发生故障时,系统将通过时钟模块得到发生故障的时间和发生的故障类型等相关信息一并记录到 EEPROM 中。
PCF8563T是有Philips公司设计的低功耗CMOS实时时钟日历芯片。PCF8563T芯片具有1.0V~5.5V宽的工作电压范围,一个可编程的时钟输出、一个中断输出以及掉电检测电路。PCF8563T芯片通过I2C总线的方式与主控制器相连接,最大总线速度为400kHz。PCF8563T芯片内部的地址寄存器在进行读写操作时会自动产生增量。PCF8563T芯片可以采用单独电池供电,以保证系统掉电时,芯片可以继续工作。时钟模块电路如图3.13所示。
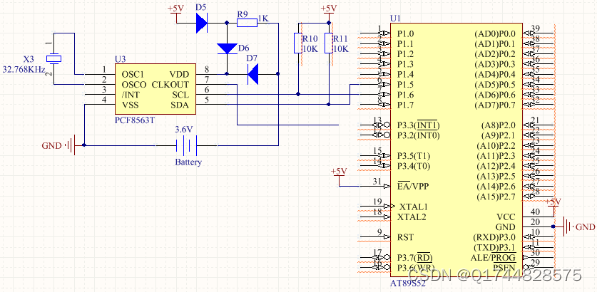
图3.13 时钟模块电路
时钟模块中PCF8563芯片读取时钟芯片的时间的子程序如下:
void PCF8563_Get(uchar firsttype,uchar n,uchar data[])
{
uchar i;
I2C_Start();
I2C_Send_Byte(0xA2);//主控制器发送器件地址(写命令)
I2C_Wait_Ack();//等待主控制器应答信号
I2C_Send_Byte(firsttype);//主控器发送读取数据位置
I2C_Wait_Ack();
I2C_Start();
I2C_Send_Byte(0xA3);//主控制器发送器件地址(读命令)
I2C_Wait_Ack();
for(i=0;i<n;i++)
{
data[i]=I2C_Receive_Byte();//主控制器接收字节数据
if(i!=n-1)I2C_Send_Ack();//最后一个字节之前,主控制器给从控制器发送应答位
I2C_Send_Noack();//最后一个字节,主控制器给从控制器发送非应答位
I2C_Stop();
}
}
上述程序的功能是读取时钟芯片8563的时间,firsttype是要读的第一个时间类型,n是要读取的字节数,data是时间读取到的位置,时间读取的顺序是:0x02:秒,0x03:分,0x04:小时,0x05:日,0x06:星期,0x07:月(世纪),0x08年。
主控制器首先发送器件地址(写命令),待收到应答信号后,主控制器向AT24C64芯片发送要写入的存储单元地址来寻址。之后主控制器发送器件地址(读命令),收到应答信号后,主控制器从指定的存储单元地址来读取数据。在时钟芯片内部有一个可以自动加1的指针,每当完成一次读或写操作时其指针会自动指向下一单元。
3.6 参数记忆模块
尽管AT89S52芯片自带存储器,但系统仍需要扩展片外存储器实现参数记忆功能,其原因是主控制器的存储器的数据在系统断电后会自动消失,而EEPROM中的数据则不会出现这种情况。本设计选用24系列的EEPROM芯片AT24C64来设计参数记忆模块,参数记忆模块的主要作用是存储顺序事件记录和实践报告。
24系列的EEPROM是串行接口的、用电来擦除的可编程CMOS只读存储器,擦除次数可以达到惊人的10万次以上,片内数据存储时间可达40年之久。24系列的EEPROM芯片采用单+5v供电,工电流仅为1mA。24系列的EEPROM使用I2 C总线接口,具有便于使用、电能损耗低、存储容量大等优点,被大量应用与单片机系统设计中。参数记忆模块电路如图3.14所示。
AT24C64驱动程序中写操作子程序如下:
void AT24C64_W(uchar address,uchar n,uchar data[])
{
uchar i;
if(n>32) n=32;//EEPROM芯片每页最多写入32字节
I2C_Start();
I2C_Send_Byte(0xa0);//主控制器发送器件地址(写命令)
I2C_Wait_Ack();
I2C_Send_Byte(address>>8);//主控器发送写入数据位置的高8位地址
I2C_Wait_Ack();
I2C_Send_Byte(address & 0xff);//主控制器发送写入数据位置的低8位地址
I2C_Wait_Ack();
for(i=0; i<num; i++)
{
I2C_Send_Byte(data[i]);//向EEPROM写入数据
I2C_Wait_Ack();
}
I2C_Stop();
}
上述子程序的功能是向AT24C64芯片写入数据,address是数据写入的位置,n是要写入数据的字节数,data是写入字节的数组。
主控制器首先发送器件地址(写命令),待收到应答信号后,主控制器向AT24C64芯片发送要写入的存储单元地址来寻址。主控制器收到应答信号后,向AT24C64芯片发送写入的数据。AT24C64芯片将数据接收并存入输入缓冲器后,向主控制器发送应答信号。主控制器收到应答信号后向AT24C64芯片发送停止信号Stop,而AT24C64芯片收到停止信号后把数据缓冲器红的数据写入制定的存储单元中。
AT24C64驱动程序中读操作子程序如下:
void AT24C64_R(uchar address,uchar n,uchar data[])
{
uchar i;
if(n>32) n=32;//EEPROM芯片每页最多读取32字节
I2C_Start();
I2C_Send_Byte(0xa0);//主控制器发送器件地址(写命令)
I2C_Wait_Ack();
I2C_Send_Byte(address>>8);//主控器发送读取数据位置的高8位地址
I2C_Wait_Ack();
I2C_Send_Byte(address & 0xff);//主控器发送读取数据位置的低8位地址
I2C_Wait_Ack();
I2C_Start();
I2C_Send_Byte(0xa1);//主控制器发送器件地址(读命令)
I2C_Wait_Ack();
for(i=0;i<n;i++)
{
data[i]=I2C_Receive_Byte();//主控制器接收数据
if(i!=n-1)I2C_Send_Ack();//最后一个字节之前,主控制器给从控制器发送应答位
I2C_Send_Noack();//最后一个字节,主控制器给从控制器发送非应答位
I2C_Stop();
}
}
上述子程序的功能是从AT24C64芯片读取数据,address是要读取数据的位置,n是要读取数据的字节数,data是数据读取到的位置。
主控制器首先发送器件地址(写命令),待收到应答信号后,主控制器向AT24C64芯片发送要写入的存储单元地址来寻址。之后主控制器发送器件地址(读命令),收到应答信号后,主控制器从指定的存储单元地址来读取数据。在EEPROM内部有一个可以自动加1的指针,每当完成一次读或写操作时其指针会自动指向下一单元。
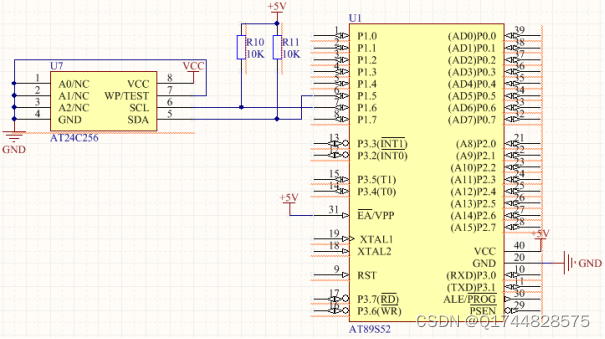
图3.14 参数记忆模块电路
3.7 显示键盘模块
显示模块的作用是在电机发生故障时,可以通过显示电路显示发生的故障信息和发生故障的时间。键盘模块的作用是可以通过键盘电路设置额定电压、额定电流、启动时间和各种保护参数等多个参数,从而实现对不同电机的保护。
在进行硬件电路设计时,通常将显示电路和键盘电路放在一起,来方便相关的操作人员进行操作,同时也给用户提供了良好的操作体验。本设计选用的是以ZLG7290B为核心设计键盘显示电路,这样既节省占用主控制器引脚数量同时又方便进行管理。ZLG7290B是数码管动态显示驱动和键盘扫描管理的芯片。ZLG7290B最多可以驱动8位共阴极结构的LED数码管,最多可以管理64个按键的扫描识别,具有自动去抖功能。此外,ZLG7290B芯片内部存在连击计数器,具备一直按住按键时连续有效的功能。ZLG7290B通过I2C总线与主控制器相连接。ZLG7290B芯片为工业级芯片,被大量应用于工业单片机系统中。本设计仅使用ZLG7290B芯片来控制4位共阴极LED数码管以及4个按键,4个按键代表的功能分别是设置、确认、右移和上移。显示键盘模块电路如图3.15所示。
显示键盘模块的ZLG7290驱动程序主要的子程序如下:
bit ZLG7290_W(uchar address,char data[])
{
bit b;
b=I2C_Sends(ZLG7290;address,data[]);
return b;
}
上述子程序功能为向ZLG7290的某个内部寄存器写入数据,其中address是ZLG7290的内部寄存器地址,data是要写入的数据。
bit ZLG7290_R(uchar address,char data[])
{
bit b;
b=I2C_Receives(ZLG7290,address,data[]);
return b;
}
上述子程序的功能为从ZLG7290的某个内部寄存器读出数据,其中address是ZLG7290的内部寄存器地址,data是读出的数据存放位置。
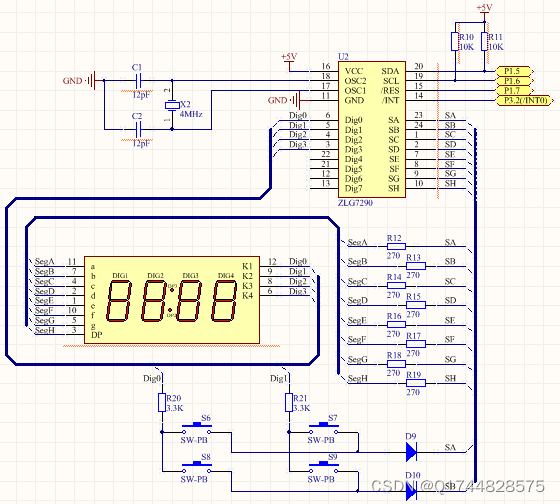
图3.15 显示键盘模块电路
时钟模块、参数记忆模块,键盘显示模块都是通过I2C总线连接单片机,但本设计选用的AT89S52单片机没有I2C总线接口标准,但可以使用C语言模拟I2C总线的各种信号及编程原理。标准51单片机模拟I2C总线程序的主要子程序有:
(1)void I2C_Delay(),该程序功能是I2C延时。
(2)void I2C_Init(),该程序功能是I2C总线初始化,使总线处于空闲状态。
(3)void I2C_Start(),该程序功能是产生I2C总线的起始状态。
(4)void I2C_Stop(),该程序功能是产生I2C总线的停止状态。
(5)void I2C_Send_Byte(),该程序功能是主控制器向I2C设备发送1 个字节的数据。
(6)uchar I2C_Receive_Byte(void),该程序功能是主控制器从I2C设备接收1个字节的数据。
(7)void I2C_Send_Ack(),该程序功能是主控制器向I2C设备发送应答位,主控制器在收到每个字节的数据后,要产生应答位。
(8)void I2C_Send_Noack(),该程序功能是主控制器向I2C设备发送非应答位,主控制器在收到最后1个字节的数据后,要产生非应答位。
(9)void I2C_Wait_Ack(),该程序的功能是等待应答信号。
(10)bit I2C_Sends(),该程序功能是总线综合发送函数,主控制器向I2C设备发送多个字节的数据。
(11)bit I2C_Receives(),该程序功能是总线综合接收函数,主控制器从I2C设备接收多个字节的数据。
3.8 通讯模块
本设计需要将单片机系统与计算机相连接以便对单片机系统进行调试。单片机的串口是TTL电平,电脑的串口为RS232电平,所以实际使用时,需要将TTL电平转换成RS232电平才可以实现单片机系统与计算机的连接。本设计选用MAX232芯片来设计通讯模块,通讯模块电路如途3.16所示。MAX232芯片是美信公司专门为电脑的RS-232标准串口设计的单电源电平转换芯片,使用+5v单电源供电。
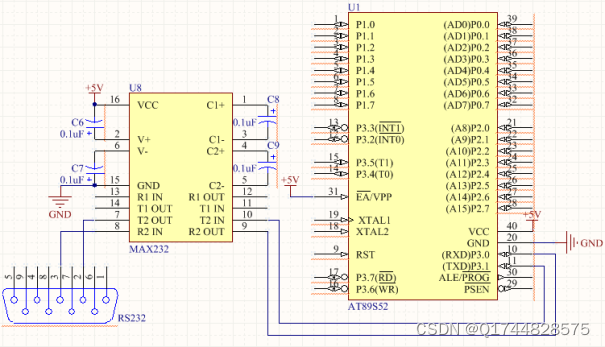
图3.16 通讯电路
3.9 电源模块
电源模块是单片机系统中的重要组成部分之一,电源电路的稳定性直接影响电机保护器能否正常工作。本设计的开关稳压电源电路中具有稳压和滤波的功能,从而提高了电源电压的稳定性,使得电机保护器的工作环境更好。电源模块电路如图3.17所示。
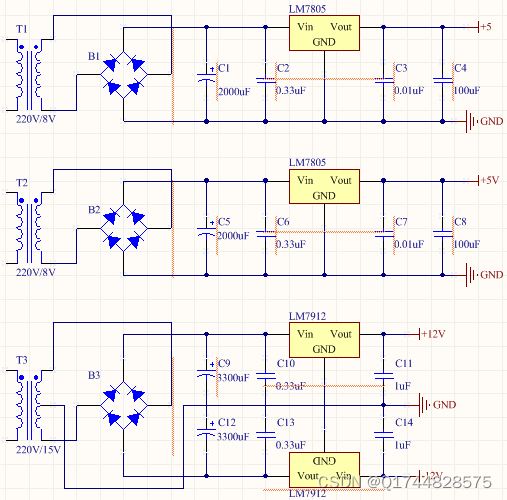
图3.17 电源电路
3.10 保护器与电机的连接
电机保护器与三相电机的连接图如图3.18所示。本设计通过将电机保护器连接到三相电机的相线和地线上来实现对三相电压的采样测量;通过三个电流互感器连接电机和电机保护器来对三相电流进行采样测量;以及通过零序电流互感器连接电机和电机保护器来测量电机的零序电流。本设计通过模拟量输出使电机保护器具有在线检测功能。本设计具有4个开关量输入,4个开关量输出。
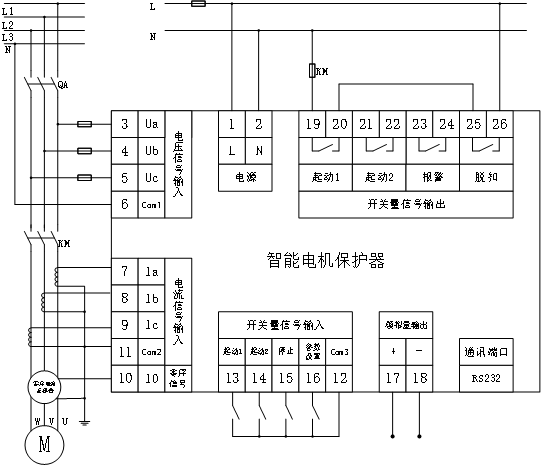
图3.18 电机保护器与三相电机连接图
电动机的起动、停止由电机保护器控制,接触器KM的线圈串入常闭脱扣继电器和常开起动1继电器之间。闭合QA,按下起动1开关量信号输入,使KM线圈带电,KM开关闭合,电机开始工作。按下停止开关量信号输入,使KM线圈失电,KM开关断开,电机停止工作。
3.11 小结
本章节收先介绍了电机保护器系统设计方面主要思路并给出了硬件方面系统框图和软件方面部分主要程序流程图。接下来对本设计选用的单片机芯片AT89S52的特点进行阐述。之后依次介绍了电机保护器的各个系统模块在单片机系统中的作用,介绍选用的芯片,并给出了各个模块具体实现电路和主要的程序代码,完成电机保护器系统的设计。
结 论
电动机在日常的生产生活中占据重要的地位。随着时代的发展,工业生产对电机保护器的要求越来越高。本文在了解电机保护器的发展现状的基础上,深入研究了电机保护器。本文作了如下工作:
(1)查阅了大量文献、资料,认识到市面上电机保护器的不足并研究学习电机各种故障的特点及电机保护技术原理,确定了电机保护方法,设计电机保护的动作方程。
(2)选用AT89S52单片机作为主控制器,并设计其余的系统模块。其中使用TLC549芯片设计A/D转换模块完成电流、电压信号的模拟量输入;使用TLC5620芯片设计D/A转换模块实现模拟量信号输出;通过ZLG7290芯片构建显示键盘模块实现人机交互功能;通过时钟芯片PCF8563T设计时钟使在电机保护器系统掉电后,时钟模块仍可以通过单独的电源供电继续工作模块;并通过24系列EEPROM芯片设计片外存储器扩展模块实现参数记忆功能。
(3)购买元件,选用练习板焊接实际的电路并编写程序对其进行调试。
通过以上工作基本上完成智能电机保护器设计。
参 考 文 献
[1] 林诗庄,蔡泽祥.大型电动机故障诊断与保护理论综述[J].广东电力,2001,14(6):9-12,22.
[2] 刘云霞.基于ATMEGA64的电机智能保护器设计和实现[D].湖南:湖南大学计算机与通信学院,2010.
[3] 李国岭.国内外电机保护控制综述与发展趋势及配套前景.第六届全国电机保护控制与电工节能技术学术研讨会论文集[C].温州:2004.
[4] 郝迎吉,李良福.基于80C196 单片机的智能监测电机保护器的研制[J].工业仪表与自动化系统, 2001,(4):50-52,55.
[5] 黄益庄.电动机保护技术及其通信技术的发展.第六届全国电机保护控制与电工节能技术学术研讨会论文集[C].温州:2004.
[6] ANSI,IEEE.IEEE guide for AC motor protection[C].IEEE Std C3796-1988,1989.
[7] 曾萍,胡景泰,覃大华.电动机保护器的发展与应用[J].电世界,2005,(6):1-4.
[8] 刘重轩.论我国电机保护的现状和未来[J].西北纺织工学院学报,1998,12(1):53-55.
[9] 袁应军.基于DSP的感应电动机智能保护器设计[D].大连:大连海事大学,2008.
[10] 李国岭.电动机保护装置及其发展趋势[J].电气时代,2000,(9):30-32。
[11] 曾萍,胡景泰.电动机保护器的发展与应用.中国电工技术学会低压电器专业委员会第十二届学术年会论文集[C],2005:43-47.
[12]雷军.基于DSP+MCU的电机微机保护装置的研制[D].中南大学控制工程,2009.
[13] 戴琨.我国电机保护现状与发展趋势[J].陶瓷研究与职业教育,2004,2(2):22-24.
[14]宋涛.具有电表功能的三相电机保护器的设计与研究[D].江南大学检测技术与自动化装置,2007.
[15]J Robinso,C.D Whelan,N.K Haggerty.Trends in Advanced Motor Protection & monitoring [J].IEEE-PCIC,2007,12(3):111-115.
[16]Venkataraman B,Godsey B,Premerlani W,Shulman E,Thakur MidenceR.Fundamentals of a motor thermal model and its applications in motoprotection[J].Industry Applications Magazine,2005,2(2):76-79.
[17]刘福珍.电动机保护装置的发展展望[J].四川职业技术学报,2007, 17(2):116-117.
[18]任彦海.智能电动机保护器的设计[D].河北工业大学电气工程,2012.
[19]严支斌,尹项根,邵德军等新型反时限过流保护曲线特性及算法研究[J].继电器,2005,33(8):44~46
[20]Saeed Lotfi-fard,Jawad Faiz,Reza Iravani.Improved Overcurrent Protection Using Symmetrical Components[J].IEEE Transactions on Power Delivery.Vol22,No.2,April 2007:843~850
[21]IEC Publication 60255-3(1989-06)Electrical Relays-Part 3:Single input energizing quantity measuring relays with dependent or independent time,Second Edition[S].
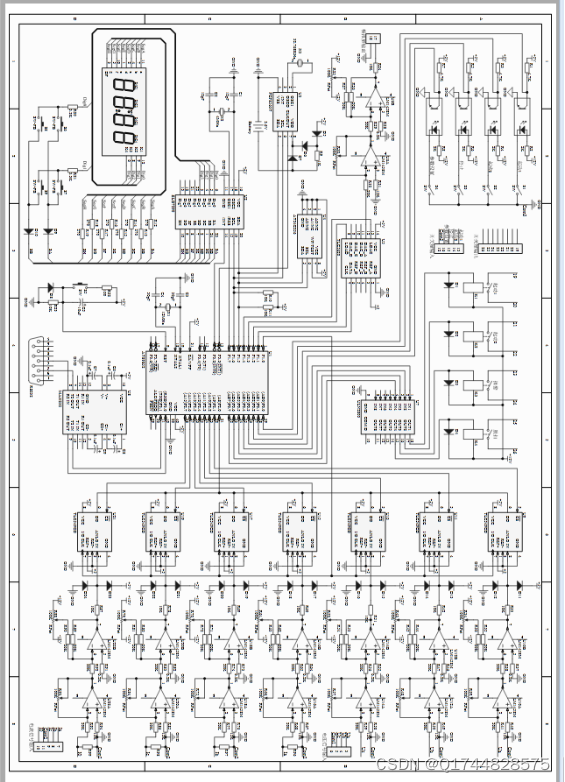
附录A 电机保护器系统总体电路图
致 谢
本论文是在老师的悉心指导下完成。论文从选题、修改到最总完稿倾注了老师的心血。在研究学习毕业设计的过程中,徐占国老师渊博的知识、对待工作严谨的态度以及对我严格的要求和耐心的指导让我铭记在心。在此,我向老师表达衷心感谢。
本论文的顺利完成也离不开同学们的关心和帮助。在此,衷心感谢同学的帮助。
最后,深深感谢家人和亲朋好友的鼓励和关怀。他们的鼓励和关怀是我前进的动力,让我顺利的完成学业。