系列文章目录
前言
Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer
GitHub Repository: GitHub - roboterax/humanoid-gym: Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer

一、介绍
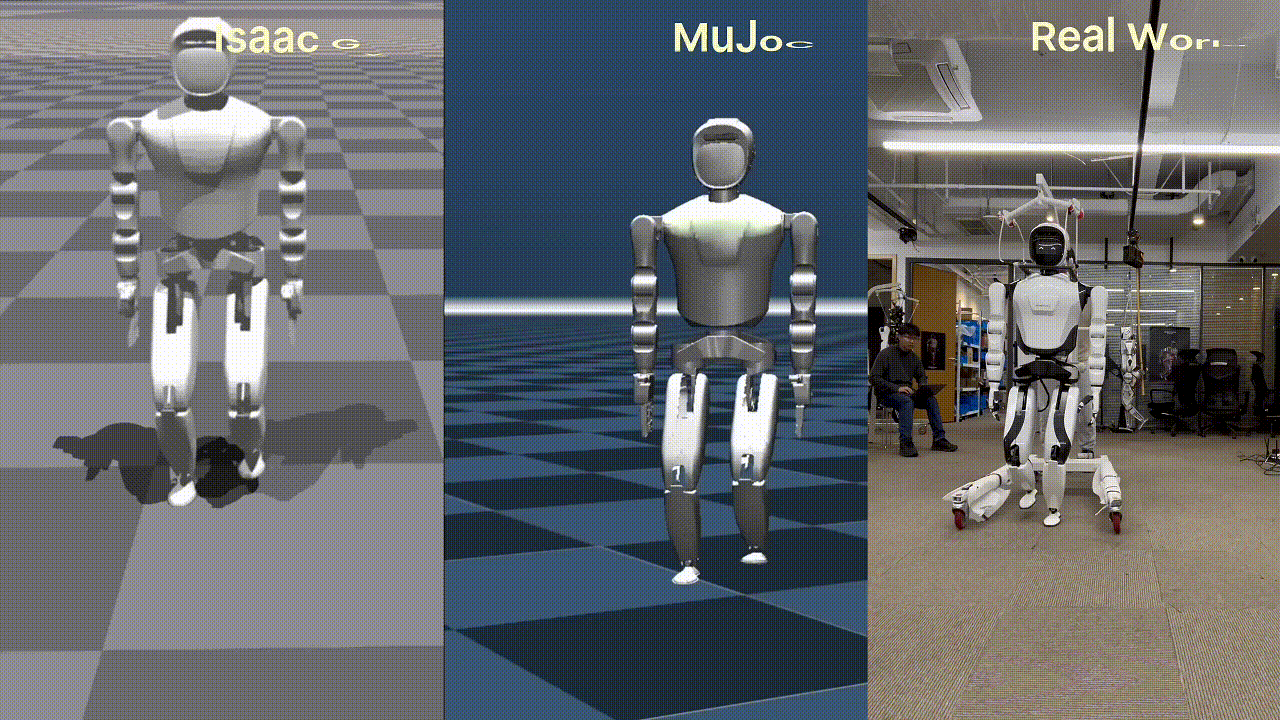
Humanoid-Gym是一个基于Nvidia Isaac Gym的易于使用的强化学习(RL)框架,旨在训练仿人机器人的运动技能,强调从仿真到真实世界环境的零误差转移。Humanoid-Gym 还集成了一个从 Isaac Gym 到 Mujoco 的仿真到仿真框架,允许用户在不同的物理仿真中验证训练好的策略,以确保策略的鲁棒性和通用性。
RobotEra 的 XBot-S(身高 1.2 米的仿人机器人)和 XBot-L(身高 1.65 米的仿人机器人)在真实环境中对该代码库进行了验证,实现了模拟到现实的零距离传输。
用于评估的机器人硬件平台

二、仿真环境搭建
欢迎访问我们的 Humanoid-Gym!
Humanoid-Gym 是一个基于 Nvidia Isaac Gym 的易于使用的强化学习(RL)框架,旨在训练仿人机器人的运动技能,强调从仿真到真实环境的零误差转移。Humanoid-Gym 还集成了从 Isaac Gym 到 Mujoco 的仿真到仿真框架,允许用户在不同的物理仿真中验证训练好的策略,以确保策略的鲁棒性和通用性。
RobotEra 的 XBot-S(身高 1.2 米的仿人机器人)和 XBot-L(身高 1.65 米的仿人机器人)在真实环境中对该代码库进行了验证,实现了模拟到现实的零距离传输。
2.1 特点
1. 仿人机器人训练
该库为仿人机器人的训练提供全面的指导和脚本。Humanoid-Gym 具有针对仿人机器人的专门奖励,简化了模拟到真实转移的难度。在本资源库中,我们以 RobotEra 的 XBot-L 为主要示例。只需稍作调整,也可用于其他机器人。我们的资源包括设置、配置和执行。我们的目标是通过提供深入的训练和优化,让机器人为真实世界的运动做好充分准备。
全面的训练指南: 我们为训练过程的每个阶段提供详尽的演练。
逐步配置说明: 我们的指导清晰简洁,可确保高效的设置过程。
易于部署的执行脚本: 利用我们预先准备好的脚本,简化培训工作流程。
2. Sim2Sim 支持
sim2sim 管道,使您能够将训练有素的策略转移到高精度和精心设计的仿真环境中。获得机器人后,您就可以放心地在真实环境中部署经过 RL 训练的策略。
我们的仿真器设置,尤其是 Mujoco 的设置,都经过了精心调整,以接近真实世界的场景。这种细致的校准确保了仿真环境和真实世界环境中的性能密切吻合。这一改进使我们的仿真更可信,增强了我们对仿真适用于真实世界场景的信心。
3. 去噪世界模型学习(即将推出)
去噪世界模型学习(DWL)提出了一种先进的模拟到现实框架,将状态估计和系统识别融为一体。这种双方法确保机器人的学习和适应在现实世界中既实用又有效。
增强的仿真适应性: 优化机器人从仿真环境过渡到真实环境的技术。
改进的状态估计能力: 用于精确可靠的状态分析的先进工具。
2.2 安装
用 Python 3.8 生成一个新的 Python 虚拟环境,使用
conda create -n myenv python=3.8为获得最佳性能,我们建议使用 NVIDIA 驱动程序版本 525
sudo apt install nvidia-driver-525。支持的最低驱动程序版本为 515。如果无法安装 525 版本,请确保系统至少有 515 版本,以维持基本功能。
使用 Cuda-11.7 安装 PyTorch 1.13:
conda install pytorch==1.13.1 torchvision==0.14.1 torchaudio==0.13.1 pytorch-cuda=11.7 -c pytorch -c nvidia使用
conda install numpy=1.23安装 numpy-1.23。
安装 Isaac Gym:
从以下地址下载并安装 Isaac Gym Preview 4
Isaac Gym - Preview Release | NVIDIA Developer.
cd isaacgym/python && pip install -e .使用
cd examples && python 1080_balls_of_solitude.py运行示例。
有关故障排除,请参阅 isaacgym/docs/index.html。
安装 Humanoid-Gym:
克隆此软件源。
cd humanoid_gym && pip install -e .2.3 使用指南
示例
# Launching PPO Policy Training for 'v1' Across 8192 Environments
# This command initiates the PPO algorithm-based training for the humanoid task.
python scripts/train.py --task=humanoid_ppo --run_name v1 --headless --num_envs 8192
# Evaluating the Trained PPO Policy 'v1'
# This command loads the 'v1' policy for performance assessment in its environment.
# Additionally, it automatically exports a JIT model, suitable for deployment purposes.
python scripts/play.py --task=humanoid_ppo --run_name v1
# Implementing Simulation-to-Simulation Model Transformation
# This command facilitates a sim-to-sim transformation using exported 'v1' policy.
python scripts/sim2sim.py --load_model /path/to/logs/XBot_ppo/exported/policies/policy_1.pt
# Run our trained policy
python scripts/sim2sim.py --load_model /path/to/logs/XBot_ppo/exported/policies/policy_example.pt
1. 默认任务
humanoid_ppo
目的: 基准、PPO 策略、多坐标系低级控制
观察空间: 可变 (47 X H) 维度,其中 H 为坐标系帧数
权限信息: 73 维
humanoid_dwl (即将推出)
2. PPO 策略
训练命令: 如需训练 PPO 策略,请执行
python humanoid/scripts/train.py --task=humanoid_ppo --load_run log_file_path --name run_name运行训练有素的保单: 要部署训练有素的 PPO 政策,请使用
python humanoid/scripts/play.py --task=humanoid_ppo --load_run log_file_path --name run_name默认情况下,将加载实验文件夹中最后一次运行的最新模型。不过,也可以通过调整训练配置中的 load_run 和 checkpoint 来选择其他运行迭代/模型。
3. Sim-to-sim
基于 Mujoco 的 Sim2Sim 部署: 使用下面的命令利用 Mujoco 执行仿真到仿真 (sim2sim) 部署:
python scripts/sim2sim.py --load_model /path/to/export/model.pt4. 参数
CPU 和 GPU 使用情况: 要在 CPU 上运行仿真,请同时设置 --sim_device=cpu 和 --rl_device=cpu。对于 GPU 操作,请相应指定 --sim_device=cuda:{0,1,2...} 和 --rl_device={0,1,2...}。请注意,CUDA_VISIBLE_DEVICES 并不适用,因此必须匹配 --sim_device 和 --rl_device 设置。
无头操作: 包括 --headless,用于无渲染操作。
渲染控制: 按 "v "键可在训练过程中切换渲染。
策略位置: 训练后的策略保存在 humanoid/logs/<experiment_name>/<date_time>_<run_name>/model_<iteration>.pt 中。
5. 命令行参数
关于 RL 训练,请参考人形机器人/utils/helpers.py#L161。关于模拟到模拟过程,请参阅 humanoid/scripts/sim2sim.py#L169。
2.4 代码结构
每个环境都取决于一个 env 文件 (legged_robot.py) 和一个配置文件 (legged_robot_config.py)。后者包含两个类: LeggedRobotCfg(包含所有环境参数)和 LeggedRobotCfgPPO(表示所有训练参数)。
env 和 config 类都使用继承。
cfg 中指定的非零奖励标度会为总奖励贡献一个相应名称的函数。
任务必须使用 task_registry.register(name,EnvClass,EnvConfig,TrainConfig)进行注册。注册可以在 envs/__init__.py 中进行,也可以在本资源库之外进行。
2.5 添加新环境
基本环境 legged_robot 构建了一个粗糙地形运动任务。相应的配置没有指定机器人资产(URDF/ MJCF),也没有奖励标度。
如果需要添加新环境,请在 envs/ 目录下新建一个文件夹,并将配置文件命名为 <your_env>_config.py。新配置应继承现有环境配置。
如果提议使用新机器人
在 resources/ 文件夹中插入相应的资产。
在 cfg 文件中,设置资产路径,定义体名、默认关节位置和 PD 增益。指定所需的 train_cfg 和环境名称(python 类)。
在 train_cfg 中,设置 experiment_name 和 run_name。
必要时,在 <your_env>.py 中创建环境。继承现有环境,覆盖所需的功能和/或添加自己的奖励功能。
在人形机器人/envs/__init__.py 中注册环境。
根据需要修改或调整 cfg 或 cfg_train 中的其他参数。要移除奖励,请将其比例设为零。避免修改其他环境的参数!
2.6 故障排除
请注意以下情况:
# error
ImportError: libpython3.8.so.1.0: cannot open shared object file: No such file or directory
# solution
# set the correct path
export LD_LIBRARY_PATH="~/miniconda3/envs/your_env/lib:$LD_LIBRARY_PATH"
# OR
sudo apt install libpython3.8
# error
AttributeError: module 'distutils' has no attribute 'version'
# solution
# install pytorch 1.12.0
conda install pytorch torchvision torchaudio cudatoolkit=11.3 -c pytorch
# error, results from libstdc++ version distributed with conda differing from the one used on your system to build Isaac Gym
ImportError: /home/roboterax/anaconda3/bin/../lib/libstdc++.so.6: version `GLIBCXX_3.4.20` not found (required by /home/roboterax/carbgym/python/isaacgym/_bindings/linux64/gym_36.so)
# solution
mkdir ${YOUR_CONDA_ENV}/lib/_unused
mv ${YOUR_CONDA_ENV}/lib/libstdc++* ${YOUR_CONDA_ENV}/lib/_unused2.7 致谢
Humanoid-Gym 的实现依赖于机器人系统实验室(Robotic Systems Lab)创建的 legged_gym 和 rsl_rl 项目的资源。我们特别利用了他们研究中的 LeggedRobot 实现来增强我们的代码库。
2.8 引用
如果您使用本代码或其部分内容,请引用以下内容:
@software{RobotEra2024Humanoid-Gym,
author = {RobotEra},
title = {{Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer}},
url = {https://github.com/roboterax/humanoid-gym},
year = {2024}
}