本篇文章是博主在最化优学习、人工智能等领域学习时,用于个人学习、研究或者欣赏使用,并基于博主对相关等领域的一些理解而记录的学习摘录和笔记,若有不当和侵权之处,指出后将会立即改正,还望谅解。文章分类在最优化算法:
最优化算法(1)---《基于禁忌搜索算法(TS)的TSP(Python实现)》
基于禁忌搜索算法(TS)的TSP(Python实现)
目录
基于禁忌搜索算法(TS)的TSP(Python实现)
1.项目介绍
2.程序代码
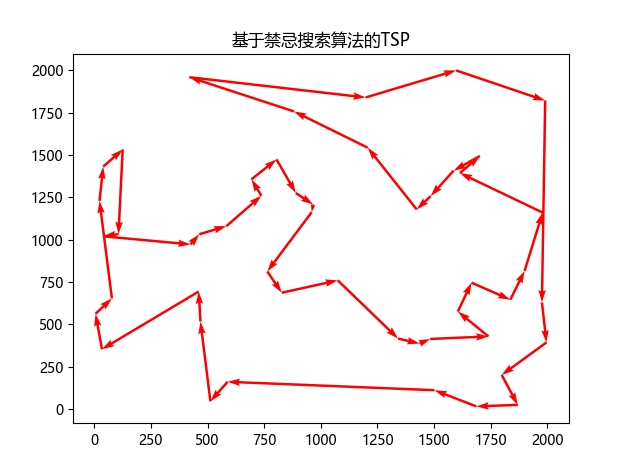
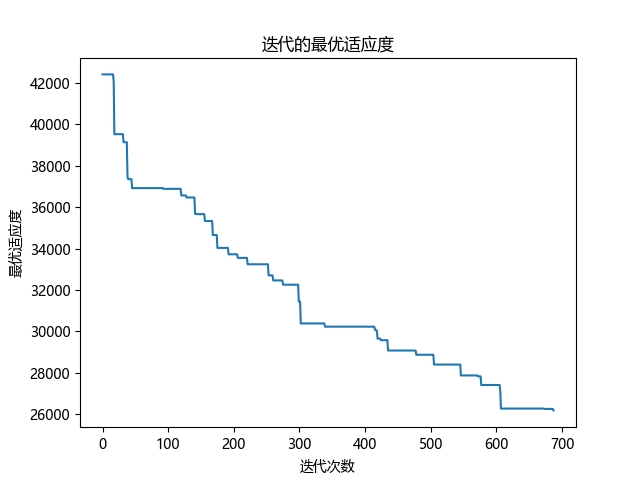
3.运行结果
1.项目介绍
基于禁忌搜索算法(TS)的TSP(Traveling Salesman Problem,旅行商问题),涉及一种用于解决TSP的优化方法。TSP是一个经典的组合优化问题,目标是寻找一条最短路径,使得旅行商可以访问每个城市恰好一次并返回起点城市。
TS算法作为一种启发式优化算法,在TSP求解中具有广泛的应用。相较于传统的穷举或贪婪算法,TS算法通过引入禁忌列表和邻域结构来更全面地探索解空间,从而更有可能找到较为优秀的近似最优解。
禁忌搜索算法从一个初始解开始,在每次迭代中根据邻域结构生成新的解,并根据目标函数对其质量进行评估。若新解优于当前最优解且未出现在禁忌列表中,则接受该解作为当前最优解;否则,寻找下一个最佳候选解。同时,禁忌列表会记录一段时间内禁止选择的解,以避免陷入循环或重复访问相似解的情况。
在TSP问题上,邻域结构通常包括交换两个城市的位置、翻转子路径等操作,而目标函数则是路径长度。禁忌搜索通过不断迭代搜索和更新禁忌列表,逐步改进当前路径,直至满足结束条件为止。
在基于TS算法求解TSP问题时,禁忌搜索的核心思想包括以下几个方面:
- 禁忌列表:记录已经探索过的路径或解,以避免下一步重复探索相同的路径或解。
- 邻域结构:定义了TSP解空间中可行解之间的相邻关系,如通过交换、插入等操作生成新的解。
- 目标函数:通常是TSP问题中路径长度的计算,用于评估每个解的质量。
TS算法求解TSP的基本步骤包括:
- 初始化:随机生成初始路径
- 迭代搜索:根据邻域结构和目标函数,通过禁忌搜索不断调整路径,并更新禁忌列表,记录当前最优路径
- 终止条件:达到预设的迭代次数或满足特定条件时结束搜索,返回最优路径
通过利用TS算法求解TSP问题,可以有效地寻找到较为优秀的旅行路线,虽不能保证找到全局最优解,但通常能获得接近最优解的结果。
2.程序代码
""""
题目:基于禁忌搜索算法的TSP
作者:Rainbook
最终修改时间:2023.12.30
"""
import math
import random
import pandas as pd
import matplotlib.pyplot as plt
from matplotlib.pylab import mpl
import numpy as np
plt.rcParams['font.sans-serif'] = ['Microsoft YaHei'] # 使用微软雅黑字体
plt.rcParams['axes.unicode_minus'] = False # 处理负号显示异常
# 计算路径距离,即评价函数
def calFitness(line, dis_matrix):
dis_sum = 0
dis = 0
for i in range(len(line)):
if i < len(line) - 1:
dis = dis_matrix.loc[line[i], line[i + 1]] # 计算距离
dis_sum = dis_sum + dis
else:
dis = dis_matrix.loc[line[i], line[0]]
dis_sum = dis_sum + dis
return round(dis_sum, 1)
def traversal_search(line, dis_matrix, tabu_list):
# 邻域随机遍历搜索
traversal = 0 # 搜索次数
traversal_list = [] # 存储局部搜索生成的解,也充当局部禁忌表
traversal_value = [] # 存储局部解对应路径距离
while traversal <= traversalMax:
pos1, pos2 = random.randint(0, len(line) - 1), random.randint(0, len(line) - 1) # 交换点
# 复制当前路径,并交换生成新路径
new_line = line.copy()
new_line[pos1], new_line[pos2] = new_line[pos2], new_line[pos1]
new_value = calFitness(new_line, dis_matrix) # 当前路径距离
# 新生成路径不在全局禁忌表和局部禁忌表中,为有效搜索,否则继续搜索
if (new_line not in traversal_list) & (new_line not in tabu_list):
traversal_list.append(new_line)
traversal_value.append(new_value)
traversal += 1
return min(traversal_value), traversal_list[traversal_value.index(min(traversal_value))]
def greedy(CityCoordinates, dis_matrix):
'''贪婪策略构造初始解'''
# 出来dis_matrix
dis_matrix = dis_matrix.astype('float64')
for i in range(len(CityCoordinates)): dis_matrix.loc[i, i] = math.pow(10, 10)
line = [] # 初始化
now_city = random.randint(0, len(CityCoordinates) - 1) # 随机生成出发城市
line.append(now_city) # 添加当前城市到路径
dis_matrix.loc[:, now_city] = math.pow(10, 10) # 更新距离矩阵,已经过城市不再被取出
for i in range(len(CityCoordinates) - 1):
next_city = dis_matrix.loc[now_city, :].idxmin() # 距离最近的城市
line.append(next_city) # 添加进路径
dis_matrix.loc[:, next_city] = math.pow(10, 10) # 更新距离矩阵
now_city = next_city # 更新当前城市
return line
# 画路径图
def draw_path(line, CityCoordinates):
x, y = [], []
for i in line:
Coordinate = CityCoordinates[i]
x.append(Coordinate[0])
y.append(Coordinate[1])
for j in range(len(line) - 1):
plt.quiver(x[j], y[j], x[j + 1] - x[j], y[j + 1] - y[j], color='r', width=0.005, angles='xy', scale=1,
scale_units='xy')
plt.quiver(x[-1], y[-1], x[0] - x[-1], y[0] - y[-1], color='r', width=0.005, angles='xy', scale=1,
scale_units='xy')
plt.title('基于禁忌搜索算法的TSP')
# plt.figure()
# plt.plot(x, y,color='r', alpha=0.8, linewidth=0.8)
# plt.xlabel('x')
# plt.ylabel('y')
plt.show()
if __name__ == '__main__':
# 随机生成城市信息
nCity = 50
CityCoordinates = np.random.uniform(0, 2000, [nCity, 2]) # uniform()生成nCity个二维数组,数值范围是0到2000
# 参数设置
CityNum = nCity # 城市数量
MinCoordinate = 0 # 二维坐标最小值
MaxCoordinate = 101 # 二维坐标最大值
tabu_limit = 50 # 禁忌长度,该值应小于(CityNum*(CityNum-1)/2)
iterMax = 200 # 迭代次数
traversalMax = 100 # 每一代局部搜索次数
tabu_list = [] # 禁忌表
tabu_time = [] # 禁忌次数
best_value = math.pow(10, 10) # 较大的初始值,存储最优解
best_line = [] # 存储最优路径
# 计算城市之间的距离
dis_matrix = pd.DataFrame(data=None, columns=range(len(CityCoordinates)), index=range(len(CityCoordinates)))
for i in range(len(CityCoordinates)):
xi, yi = CityCoordinates[i][0], CityCoordinates[i][1]
for j in range(len(CityCoordinates)):
xj, yj = CityCoordinates[j][0], CityCoordinates[j][1]
dis_matrix.iloc[i, j] = round(math.sqrt((xi - xj) ** 2 + (yi - yj) ** 2), 2)
# 贪婪构造
line = greedy(CityCoordinates, dis_matrix)
value = calFitness(line, dis_matrix) # 初始路径距离
# 存储当前最优
best_value, best_line = value, line
best_value_list = []
best_value_list.append(best_value)
# 更新禁忌表
tabu_list.append(line)
tabu_time.append(tabu_limit)
itera = 0
while itera <= iterMax:
new_value, new_line = traversal_search(line, dis_matrix, tabu_list)
if new_value < best_value: # 优于最优解
best_value, best_line = new_value, new_line # 更新最优解
best_value_list.append(best_value)
print('第%d次:当前优解为' % (itera+1))
print(best_line)
line, value = new_line, new_value # 更新当前解
# 更新禁忌表
tabu_time = [x - 1 for x in tabu_time]
if 0 in tabu_time:
tabu_list.remove(tabu_list[tabu_time.index(0)])
tabu_time.remove(0)
tabu_list.append(line)
tabu_time.append(tabu_limit)
itera += 1
# 路径顺序
print("-------最优解为:")
print(best_line)
# 画路径图
draw_path(best_line, CityCoordinates)3.运行结果
参考资料来源:CSDN、百度搜索、维基百科等
文章若有不当和不正确之处,还望理解与指出。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请联系博主删除。如有错误、疑问和侵权,欢迎评论留言联系作者,或者关注VX公众号:Rain21321,联系作者。