最近在复习408操作系统进程时,决定用代码模拟调度算法来熟悉详细过程!
选择两个好写点的算法进行练习!!!
以下代码使用c++语言。优先队列和队列直接使用STL容器!!!
引入头文件
#include<iostream>
#include<queue>
#include<map>
using namespace std;
数据结构设计
//进程控制块
struct PCB {
string ID;//进程ID
double arrivalTime;//到达处理机时间
double remainTime;//剩余服务时间
double priority;//优先级(越小优先级越高)
//其他信息省略...
};
由于有两个算法,为了减少冗余度。将公共部分使用自定义基类Base实现。
//调度基础类
class Base {
public:
map<string,pair<double,double>>times;//进程ID->[等待时间,运行时间]
queue<PCB*>Queue;//普通队列
priority_queue<PCB*, vector<PCB*>, cmp>pq;//优先队列
double avWait;//平均等待时间
double avTurnaround;//平均周转时间
double avWeightedTurnaround;//平均带权周转时间
Base() {
this->avWait = this->avTurnaround = this->avWeightedTurnaround = 0.0;
}
//输出各进程时间
void printTime() {
for (map<string, pair<double, double>>::iterator it = times.begin(); it != times.end(); ++it) {
printf("进程%s运行了%.3lf秒,等待了%.3lf秒\n", it->first.c_str(), it->second.second, it->second.first);
}
calculate_time();//计算平均时间
printf("平均等待时间为%.3lf秒,平均周转时间%.3lf秒,平均带权周转时间%.3lf秒\n",avWait,avTurnaround,avWeightedTurnaround);
}
//计算各平均时间
void calculate_time() {
double sumWait = 0.0, sumTurnaround = 0.0, sumWeightedTurnaround = 0.0;//总等待时间 总周转时间 总带权周转时间
for (map<string, pair<double, double>>::iterator it = times.begin(); it != times.end(); ++it) {
sumWait += it->second.first;
sumTurnaround += it->second.first + it->second.second;
sumWeightedTurnaround += (it->second.first + it->second.second) / it->second.second;
}
avWait = sumWait / times.size();
avTurnaround = sumTurnaround / times.size();
avWeightedTurnaround = sumWeightedTurnaround / times.size();
}
};
先来先服务调度类
解释:
在FCFS构造函数中将进程控制块添加到普通队列Queue中
过程:
①.每次从Queue中取出一个元素
②.如果当前时间小于即将需要运行的进程到达时间,就将当前时间改成下一个需要运行进程到达的时间。
③.times成员时用于记录进程等待时间和运行时间。
④.运行完成后,当前时间+=上一个进程运行的时间
//先来先服务调度类(FCFS)[非抢占式]
class FCFS :private Base {
public:
FCFS(PCB* pcbs,int len) {
for (int i = 0; i < len; ++i) {
Queue.push(pcbs+i);//加入到进程队列
}
}
void run() {
double curTime = 0;//当前时间
while (!Queue.empty()) {
PCB* curRun = Queue.front();//①从队列头部获取进程控制块
Queue.pop();//弹出进程控制块
if (curTime < curRun->arrivalTime) {//②当前时间比现在需要运行的进程时间小,需要将当前时间改成进程到达时间
curTime = curRun->arrivalTime;
}
times[curRun->ID] = { curTime - curRun->arrivalTime,curRun->remainTime };//③
curTime += curRun->remainTime;//④当前时间 += 进程剩余服务时间
}
}
void show() {
this->printTime();
}
};
测试函数
void fcfs() {
cout << "先来先服务算法:" << endl;
PCB pcbs[4] = { {"1号",8.0,2.0},{"2号",8.4,1.0},{"3号",8.8,0.5},{"4号",9.0,0.2} };
FCFS fcfs(pcbs, 4);
fcfs.run();
fcfs.show();
}
短作业优先调度类
解释:
将进程的剩余时间作为优先级的比较 (每次调度需要使用剩余时间最小的)
过程:
①.while循坏的作用时只要还有进程没运行完,就继续调度
②.首先将到达时间比当前时间小的进程的PCB放入优先队列中。
③.如果优先队列为空就
如果后续没有进程加入->调度结束
如果后续还有进程加入->将当前时间改为下一个需要运行的进程到达时间
④.向后遍历(查看后面是否有多个同时到达的进程)
⑤.从优先队列取出需要服务时间最短的进程
⑥.记录等待时间和运行时间
//短作业优先调度类(SJF)[非抢占式]
class SJF :private Base {
public:
SJF(PCB* pcbs, int len) {
run(pcbs,len);
}
void run(PCB* pcbs, int len) {
double curTime = 0.0;//当前时间
int i = 0;//pcbs的下标
while (!pq.empty() || i < len) {//①当优先队列不为空或还有进程没运行
//每个进程运行期间可能有其他进程加入
//因此需要将运行期间加入的进程放入优先队列中
for (; i < len; ++i) {
if (pcbs[i].arrivalTime <= curTime) {//②进程到达时间小于等于当前时间
pq.push(&pcbs[i]);
}
else {
break;
}
}
//如果当前优先队列中没有进程
//说明在当前时间运行完了已到达的进程
//但是可能后续还有进程
//当前时间就要跳到后续进程的到达时间
if (pq.empty()) {//③
if (i == len) {
//说明运行结束,可以退出了
break;
}
else {//后续还有进程到来
curTime = pcbs[i].arrivalTime;
}
}
//可能同时有多个进程到来
//多以需要便利加入
for (; i < len; ++i) {//④
if (curTime == pcbs[i].arrivalTime) {
pq.push(&pcbs[i]);
}
else {
break;
}
}
PCB* curRun = pq.top();//⑤
pq.pop();
times[curRun->ID] = { curTime - curRun->arrivalTime,curRun->remainTime };//⑥
curTime += curRun->remainTime;
}
}
void show() {
this->printTime();
}
};
测试函数
void sjf() {
cout << "短作业优先算法:" << endl;
/*
由于在设计优先队列对比的优先级是根据pcb中的优先级对比的,
但是这里需要根据时间来对比优先级,
将剩余时间直接赋值给优先级用于对比
*/
PCB pcbs[4] = { {"1号",8.0,2.0,2.0},{"2号",8.4,1.0,1.0},{"3号",8.8,0.5,0.5},{"4号",9.0,0.2,0.2} };
SJF sjf(pcbs,4);
sjf.show();
}
主函数
int main() {
fcfs();
sjf();
}
运行结果
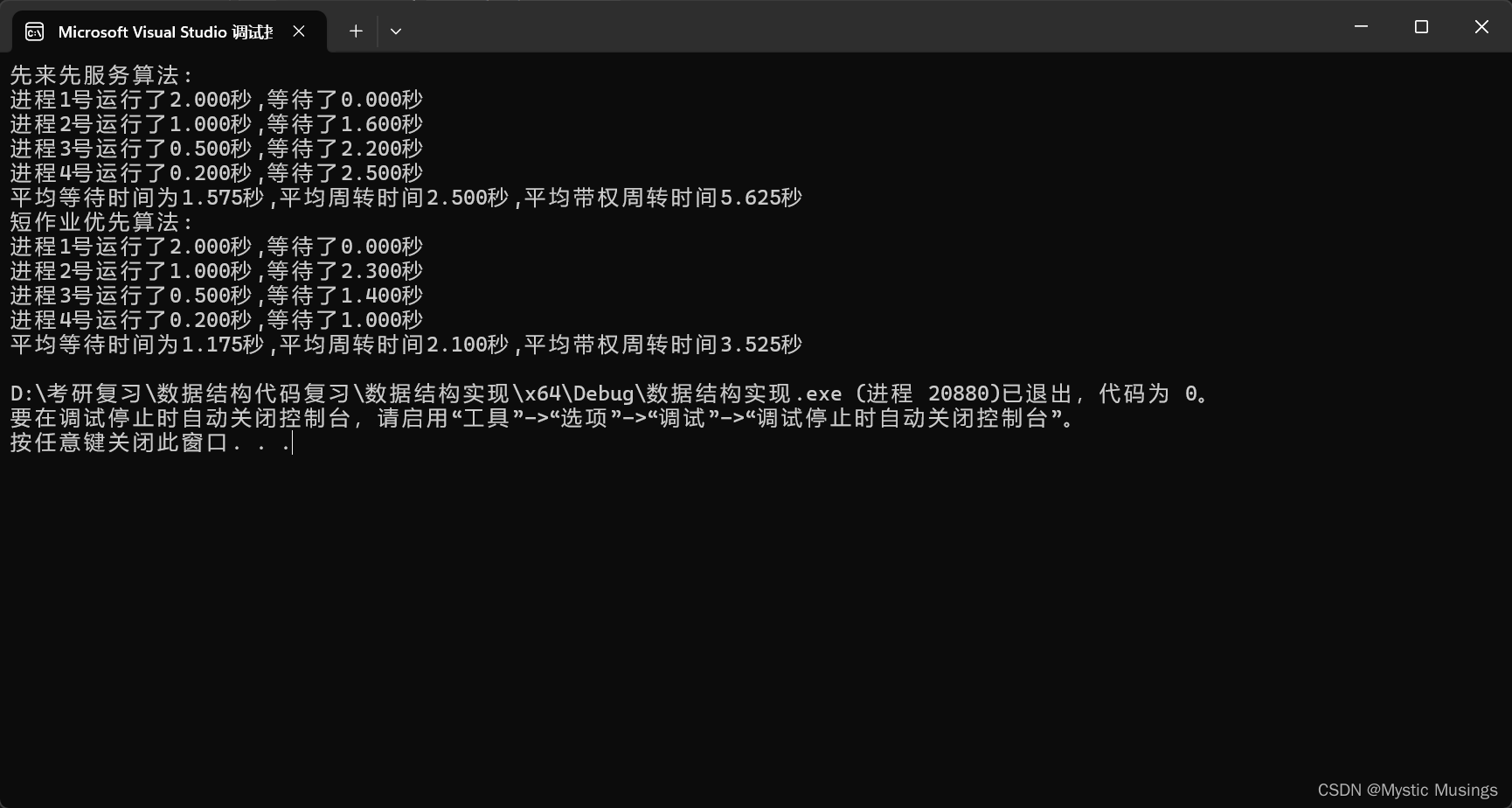
先来先服务算法:
进程1号运行了2.000秒,等待了0.000秒
进程2号运行了1.000秒,等待了1.600秒
进程3号运行了0.500秒,等待了2.200秒
进程4号运行了0.200秒,等待了2.500秒
平均等待时间为1.575秒,平均周转时间2.500秒,平均带权周转时间5.625秒
短作业优先算法:
进程1号运行了2.000秒,等待了0.000秒
进程2号运行了1.000秒,等待了2.300秒
进程3号运行了0.500秒,等待了1.400秒
进程4号运行了0.200秒,等待了1.000秒
平均等待时间为1.175秒,平均周转时间2.100秒,平均带权周转时间3.525秒
测试数据来自王道考研操作系统2024版64页或2025版71页!!!