FPFH特征提取时谁提出的,尊重一下原创:
[1] Rusu, Radu Bogdan, Nico Blodow, and Michael Beetz. “Fast point feature histograms (FPFH) for 3D registration.” In 2009 IEEE International Conference on Robotics and Automation, pp. 3212-3217. IEEE, 2009.
地址:
【免费】(2009FPFH)Fast-Point-Feature-Histograms-FPFH-for-3D-registratio资源-CSDN文库![]() https://download.csdn.net/download/Vertira/88910855
https://download.csdn.net/download/Vertira/88910855
在matlab中,已经封装成一个函数即: extractFPFHFeatures(),下面是在matlab中的详细解释
help extractFPFHFeatures
extractFPFHFeatures - Extract fast point feature histogram (FPFH) descriptors from point cloud
This MATLAB function extracts FPFH descriptors for each valid point in
the input point cloud object.
features = extractFPFHFeatures(ptCloudIn)
features = extractFPFHFeatures(ptCloudIn,indices)
features = extractFPFHFeatures(ptCloudIn,row,column)
[___,validIndices] = extractFPFHFeatures(___)
[___] = extractFPFHFeatures(___,Name,Value)
输入参数
ptCloudIn - Point cloud
pointCloud object
indices - Linear indices of selected points
vector of positive integers
row - Row indices of selected points
vector of positive integers
column - Column indices of selected points
vector of positive integers
名称-值参数
NumNeighbors - Number of neighbors for KNN search
50 (默认值) | positive integer
Radius - Radius considered for radius search
0.05 (默认值) | positive real-valued scalar
输出参数
features - FPFH descriptors
N-by-33 matrix of positive real values
validIndices - Linear indices of valid points
vector of positive integers
打开示例
Extract FPFH Descriptors at Selected Indices in Point Cloud
See also pcread, pcdownsample, pcnormals, pcshow, pointCloud
在 R2020b 中引入
extractFPFHFeatures 的文档使用这个函数的方法1:
features = extractFPFHFeatures(ptCloudIn)
提取输入点云对象中每个有效点的FPFH描述符。该函数以N× 33矩阵的形式返回描述符,其中N是输入点云中的有效点的数量。
方法2:
features = extractFPFHFeatures(ptCloudIn,indices)
提取有效指定indices位置的特征。(这个indices可以是数组)
方法3:
features = extractFPFHFeatures(ptCloudIn,row,column)
在输入的有组织点云ptCloudn的指定的二维索引处提取有效点的FPFH描述符。将点的行索引和列索引分别指定为行和列。
row:有序点云中选定点的行索引,指定为正整数的向量。行向量和列向量的长度必须相同。数据类型:Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
column:有序点云中选定点的列索引,指定为正整数的向量。行向量和列向量的长度必须相同。数据类型同上
方法4 ;
[___,validIndices] = extractFPFHFeatures(___)
返回已提取FPFH描述符的点云中有效点的索引。
方法5:
[___] = extractFPFHFeatures(___,Name,Value)
除了前面语法中的参数组合外,还使用一个或多个名称-值对参数指定选项。描述符的提取可以采用KNN搜索法、半径搜索法或两者的结合。extractFPFHFeatures函数默认使用KNN搜索方法提取描述符。用户可以通过名称值对参数选择提取方法。例如,extractFPFHFeatures(___,‘NumNeighbors’,8),选择KNN搜索方法提取描述符,并将k-nearest neighbor (KNN)搜索方法中需要考虑的最大邻居数设置为8。
输出参数
features:FPFH 描述符,作为正实数值的 N x 33 矩阵返回。N 是函数从中提取 FPFH 描述符的有效点数。每列都包含点云中有效点的 FPFH 描述符。若要另外返回提取点的索引,请使用有效的validIndices输出参数。
validIndices:有效点的线性索引,指定为正整数的向量。向量仅包含函数提取特征的那些点的索引。
代码实现:
%将数据加载到工作区
ptObj = pcread('bunny.ply');
%数据下采样(点太多了,整少点)
ptCloudIn = pcdownsample(ptObj,'gridAverage',0.05);
%提取指定索引出点的FPFH描述符(这里也就是提取的第6565和10000这两个点的FPFH描述符)
keyInds = [6565 10000];
features = extractFPFHFeatures(ptCloudIn,keyInds);
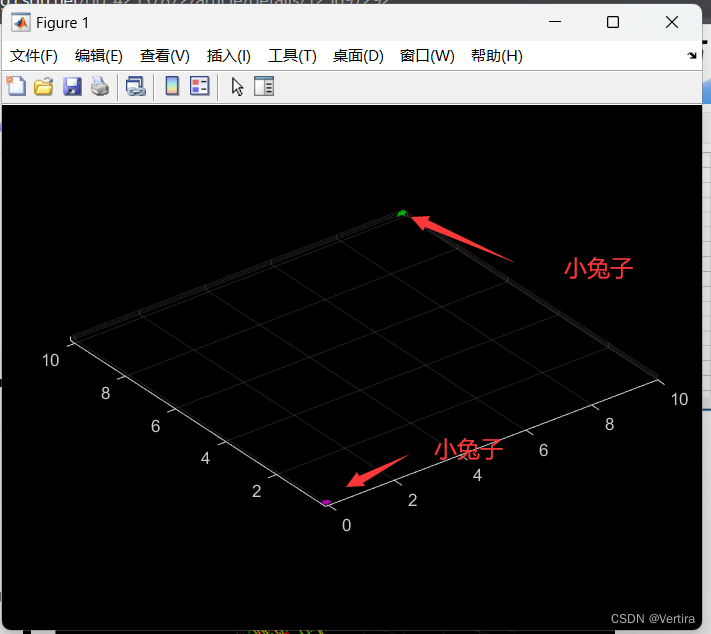
%显示点云上的关键点
ptKeyObj = pointCloud(ptCloudIn.Location(keyInds,:),'Color',[255 0 0;0 0 255]);
figure
pcshow(ptObj)
title('Selected Indices on Point Cloud')
hold on
pcshow(ptKeyObj,'MarkerSize',1000)
hold off
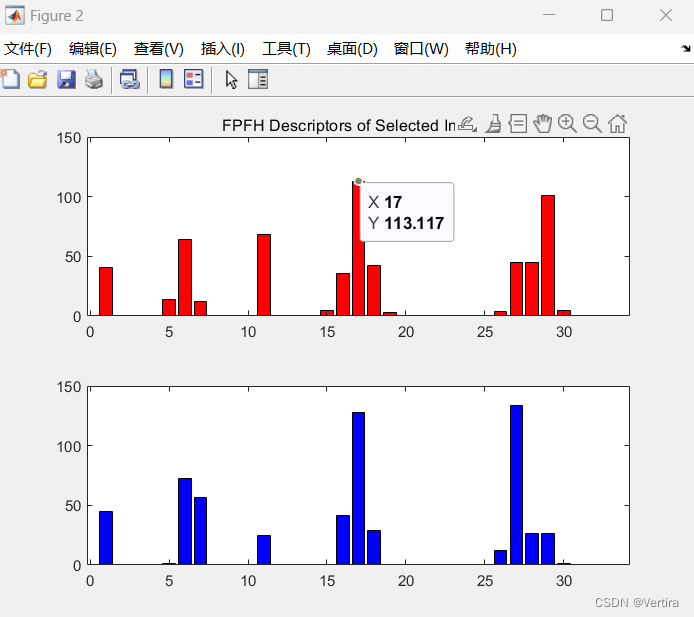
%把上面指定的那两个点的FPFH描述符显示出来
figure
ax1 = subplot(2,1,1);
bar(features(1,:),'FaceColor',[1 0 0])
title('FPFH Descriptors of Selected Indices')
ax2 = subplot(2,1,2);
bar(features(2,:),'FaceColor',[0 0 1])
linkaxes([ax1 ax2],'xy')
运行后的结果

FPFH直方图:(代码中选取的是两个点用来输出FPFH,因此这里展示的是两个点的快速点特征直方图。)
2 根据FPFH特征查找匹配点对
寻找点云之间的匹配特征,算法理论大部分来自论文《Fast global registration》
A 主要函数 pcmatchfeatures
>> help pcmatchfeatures
pcmatchfeatures - Find matching features between point clouds
This MATLAB function finds matching features between the input matrices
of extracted point cloud features and returns their indices within each
feature matrix.
indexPairs = pcmatchfeatures(features1,features2)
indexPairs = pcmatchfeatures(features1,features2,ptCloud1,ptCloud2)
[indexPairs,scores] = pcmatchfeatures(___)
[___] = pcmatchfeatures(___,Name,Value)
输入参数
features1 - First feature set
M_{1}-by-N matrix
features2 - Second feature set
M_{2}-by-N matrix
ptCloud1 - First point cloud
pointCloud object
ptCloud2 - Second point cloud
pointCloud object
名称-值参数
Method - Matching method
'Exhaustive' (默认值) | 'Approximate'
MatchThreshold - Matching threshold
0.01 (默认值) | scalar in the range (0, 1]
RejectRatio - Spatial relation threshold
0.95 (默认值) | scalar in the range (0,1)
输出参数
indexPairs - Indices of matched features
P-by-2 matrix
scores - Normalized Euclidean distance between matching features
P-element column vector
打开示例
Match Corresponding Features in Point Clouds
See also pcshowMatchedFeatures, extractFPFHFeatures
在 R2020b 中引入
pcmatchfeatures 的文档
输入参数
features1:第一个特征集(就是用FPFH对原点云提取的特征)
features2:第二个特征集(就是用FPFH对被移动的云提取的特征)
ptCloud1:第一个输入点云,指定为pointCloud对象
ptCloud2:第二个输入点云,指定为pointCloud对象
输出参数
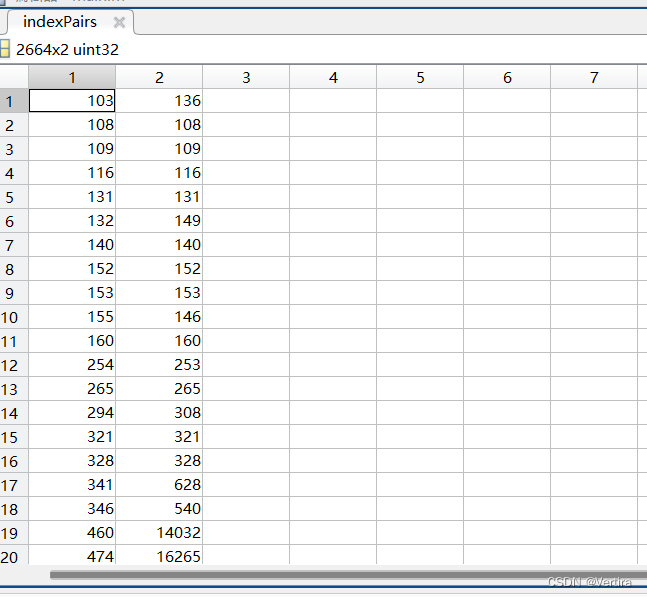
indexPairs:匹配特征的索引值(就是找到的特征点是对应原点云的那个点)。返回的是P×2矩阵P是匹配特征的数目。每一行的第一个元素是特征1中的索引值,第二个元素是特征2的索引值。
Scores:归一化欧氏距离特征。返回的一个列向量,所以这个列向量里面的元素代表了匹配特征之间的距离。(所以这个值越小,表示匹配的越好)
代码:
clc;
clear;
%%
%数据载入并预处理
%将点云数据读入工作区。
ptCld = pcread('bunny.ply');
%下采样
ptCloud = pcdownsample(ptCld,'gridAverage',0.4);
%%
%把原点云做一个旋转平移,得到另外一个点云(方法很多。1.这里使用的是仿射矩阵affine3d+pctransform结合。2.也可以直接自己写一个变换矩阵,然后对每一个点遍历分别变换也行
%3.也可以自己写一个变换矩阵T,然后把xyz数据放在列上全部变成3×n的矩阵,然后在最后一行加一个全1的一行变成4×n的矩阵,然后拿去乘变换矩阵T就行了)
%使用转换矩阵A转换并创建一个新的点云。
A = [cos(pi/6) sin(pi/6) 0 0; ...
-sin(pi/6) cos(pi/6) 0 0; ...
0 0 1 0; ...
10 10 0 1];
tform = affine3d(A);%仿射变换=线性变换+平移
ptCloudTformed = pctransform(ptCloud,tform);
%%
%可视化两个点云
pcshowpair(ptCloud,ptCloudTformed);
%%
%找两点云相互匹配对应特征。
%1.先使用ExtractFPFHFeature函数,从两个点云中提取FPFH特征
[fixedFeature,fixed_Ind] = extractFPFHFeatures(ptCloud);
[movingFeature,moving_Ind]= extractFPFHFeatures(ptCloudTformed);
%2.使用pcmatchfeatures函数找到两点云FPFH匹配的特征,返回的是点云的点对序列号(以矩阵n×2的形式返回),Score表示
[indexPairs,Score] = pcmatchfeatures(fixedFeature,movingFeature,ptCloud,ptCloudTformed);
%%
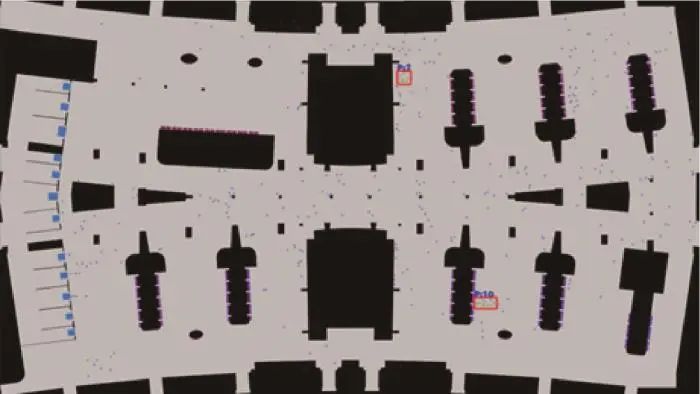
%用连接线显示两点云找到的匹配点(用这个函数即可pcshowMatchedFeatures)——这里图想要看的清除,下采样那里把阈值改大一点即可
%1.pcshowMatchedFeatures函数形参的预处理,把输入数据变成pointcloud类格式(形参都是pointcloud格式,但是我不会写pointcloud格式,但是我发现用seclect可以变成这种格式)
movingFeature_Ind = [1:size(movingFeature)]';
fixedFeature_Ind = [1:size(fixedFeature)]';
MovingFeature = select(ptCloud,movingFeature_Ind);%把movingFeature变成pointcloud类形式,才能作为pcshowMatchedFeatures形参的输入
FixedFeature = select(ptCloudTformed,fixedFeature_Ind);
matchedFixedPts = select(ptCloud,indexPairs(:,1));%select实现的是:可以从ptCloud点云中,挑选出为indexPairs里面序列的点,并转成pointcloud的形式。
matchedMovingPts = select(ptCloudTformed,indexPairs(:,2));
%2.用连接线链接匹配点
figure
pcshowMatchedFeatures(MovingFeature,FixedFeature,matchedMovingPts,matchedFixedPts)
% xlim([-40 210])
% ylim([-50 50])
title('Matched Points')
运行结果





![[计算机网络]:流量控制](https://img-blog.csdnimg.cn/direct/66488ccfb58c44a39489776e59ada41d.png)