大致逻辑如下:


一、导入动画
- 滑铲
- 蹲待机
- 蹲行走
导入到文件夹中
可以右键设置颜色,便于区分。

二、调整动画
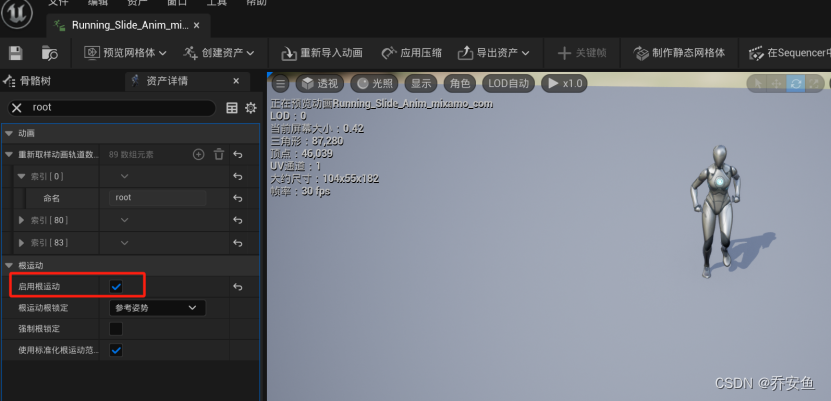
1.启动根运动
启动根运动后,人物才可以位移,不然只能在原地。
打开动画序列,勾选启用根运动Enabled root motion.
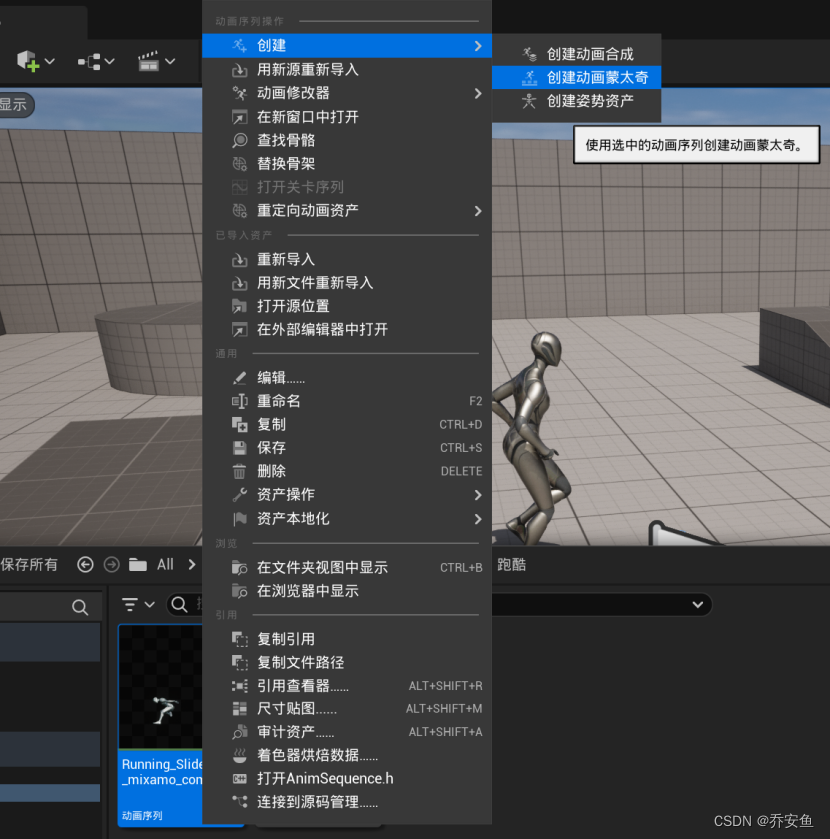
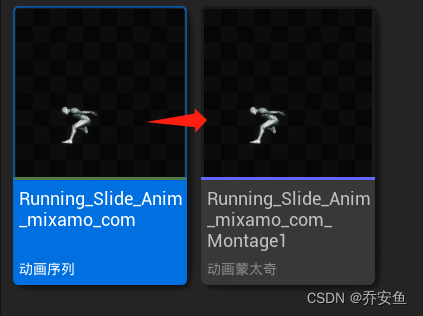
2.创建蒙太奇
对动画序列右键创建动画蒙太奇,用户释放技能时播放。
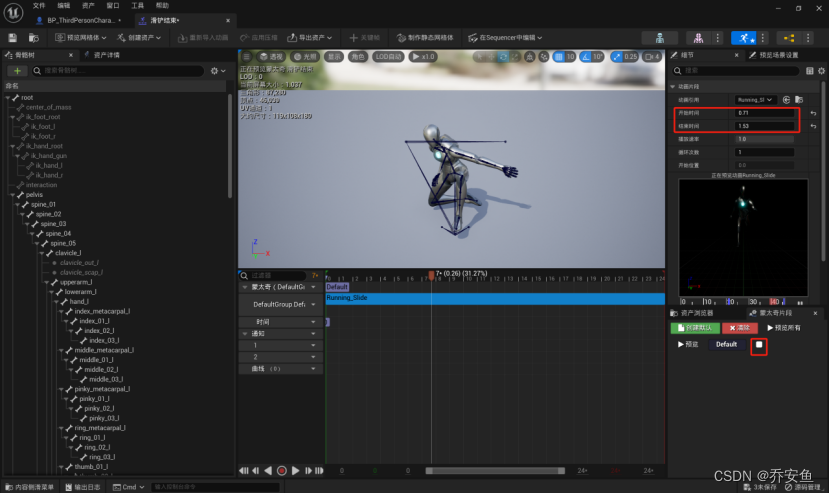
3.调整蒙太奇
因为我们要延长滑铲的时间,现在我们的滑铲蒙太奇是滑铲后站起来,但是我们只需要滑铲这个动作。
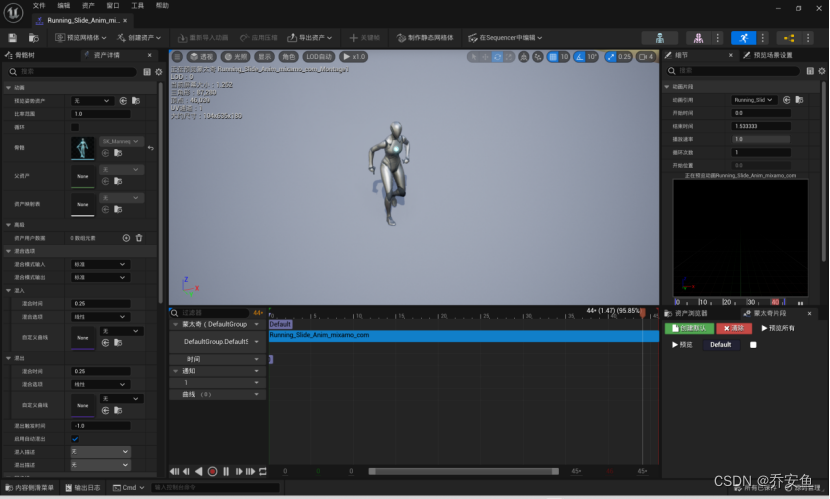
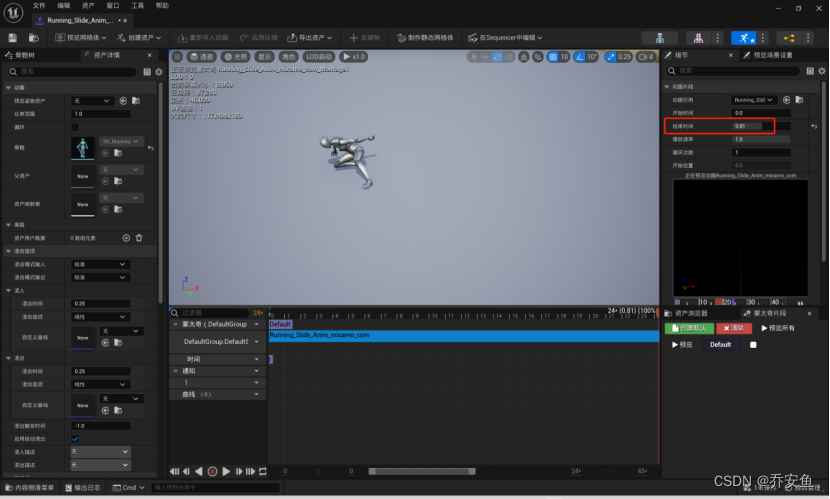
找到刚刚开始滑铲的时间,调整蒙太奇结束时间=0.71。现在我们的末尾动作就是滑铲。
4.设置循环
现在你可以看到人物一直滑铲后站起来再继续滑铲。
右键新建一个蒙太奇片段Create New Montage,名字为“循环”。

将“循环”拖拽到滑铲结尾,并勾选“循环”。现在人物滑铲后就停住了。

三、条件判断
打开人物蓝图
1.设置按键
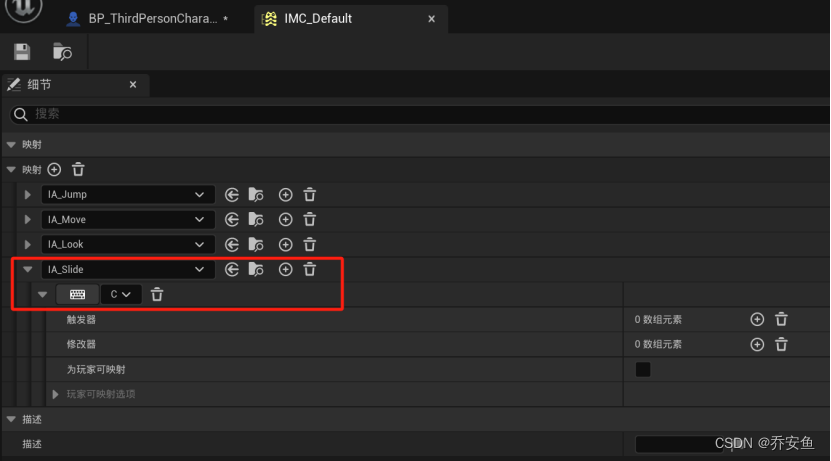
Ue5改版后,需要新建一个操作输入。并命名为IA_Sliding。
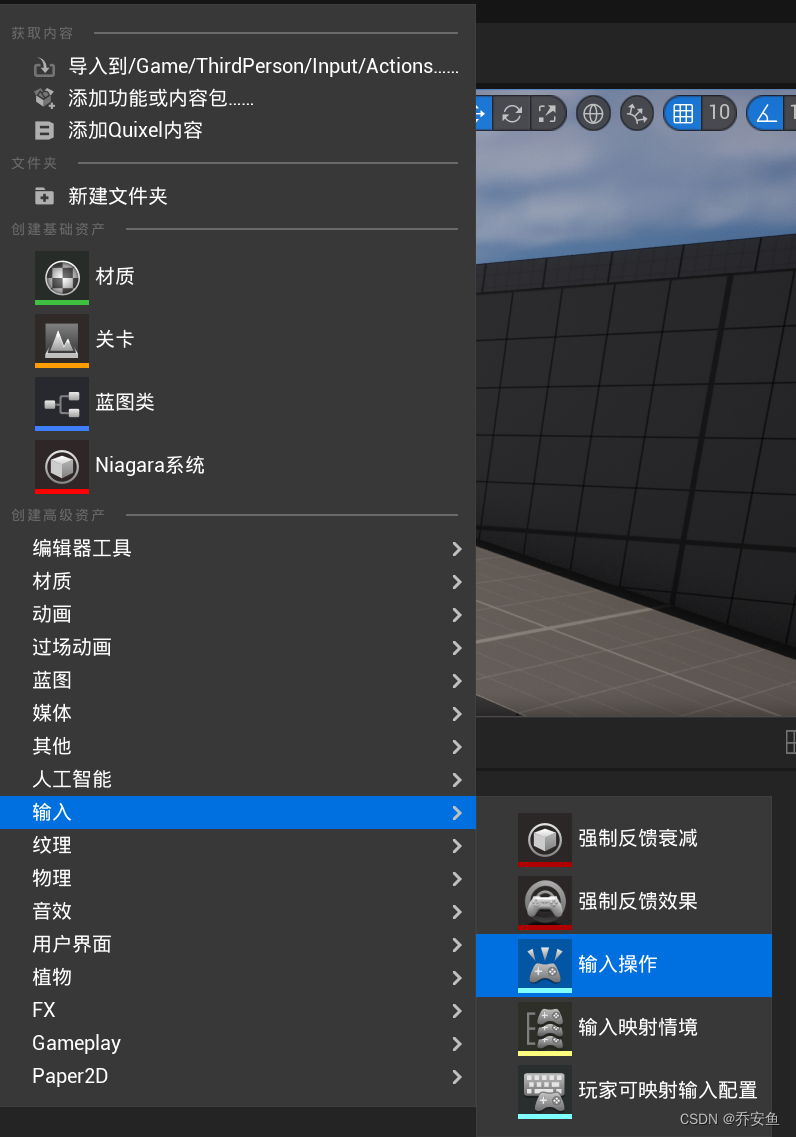

在默认输入映射情境中选择我们刚才创建IA_Sliding,并将输入键设置为C。

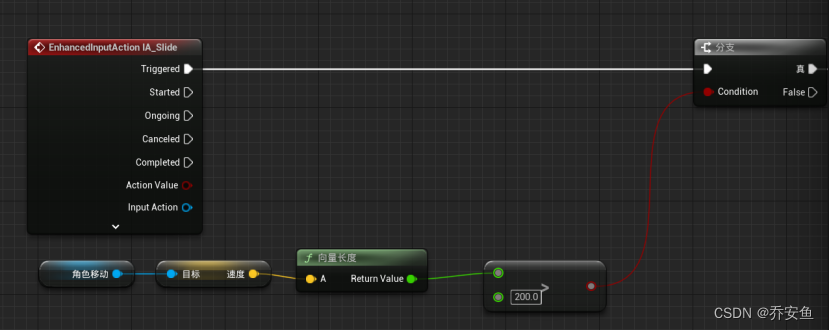
2.当人物速度>200时,才可滑铲。
Slide输入键——获取角色移动Get CharacterMovement——获取速度Get Velocity——获取向量长度Vector Length——>200
接下来判断,当玩家正在掉落时或者滑铲时,不能触发。
1.正在掉落
获取角色移动Get CharacterMovement——正在掉落is falling
2.正在滑铲
网格体Get Mesh——获取动画实例Get Animin Instance——蒙太奇正在播放Montage is playing
使用“与门”And布尔值叠加。

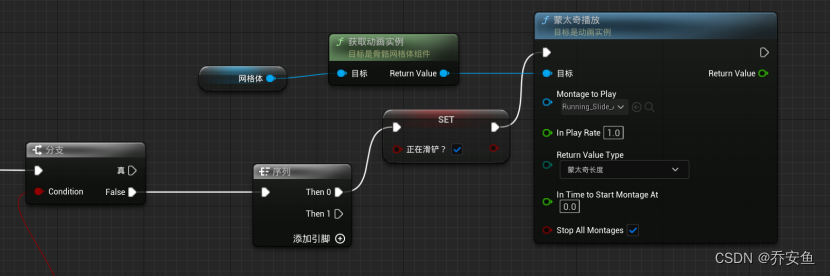
3.是否滑铲?
创建一个布尔变量“滑铲?”。

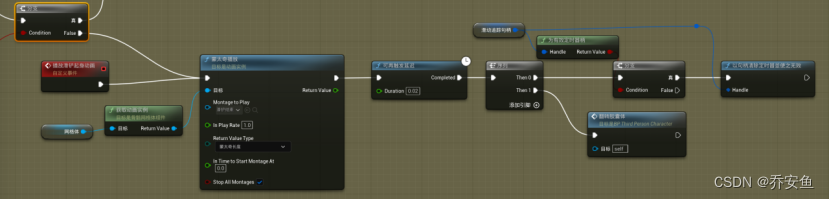
4.播放蒙太奇
创建一个序列Sequence——序列0
设置正在滑铲=真。
设置通过网格体获取动画实例——播放蒙太奇Montage Play,选取上面创建好的滑铲蒙太奇。
四、缩放胶囊体
虽然现在我们已经可以位移了,但是如果不调整胶囊体,你会发现腿部动作形变得很厉害。

通过时间轴来缩放胶囊体。
1.创建时间轴
序列1——添加时间轴Add Timeline,命名“缩放胶囊体”。
打开时间轴,添加浮点型轨道,命名为“值”,长度=0.2

右键创建两个关键帧:
第一个关键帧:时间=0,值=0;
第二个关键帧:时间=0.2,值=1;

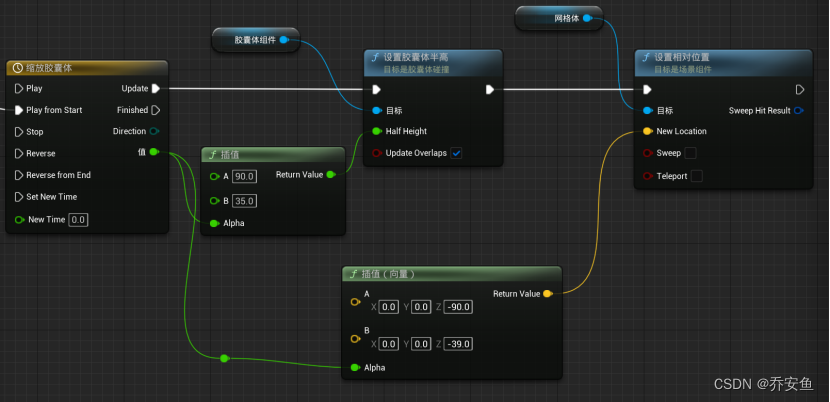
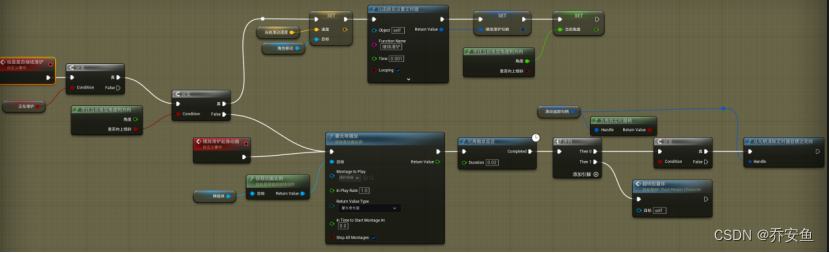
2.设置胶囊体大小
将时间轴的开始执行引脚改为Play from start。
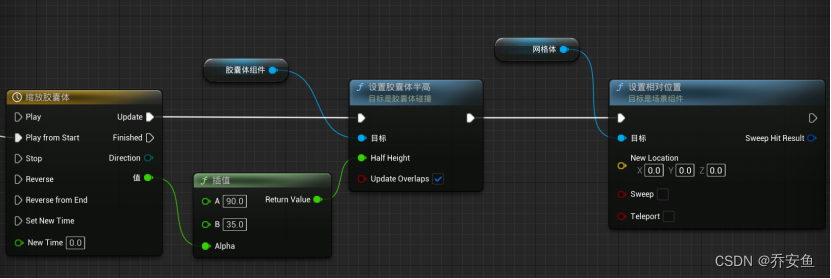
胶囊体组件Get capsual component——设置胶囊体半高Set capsual half height——通过插值Lerp,将胶囊体半高变化设置在35-90之间。(平滑过度)
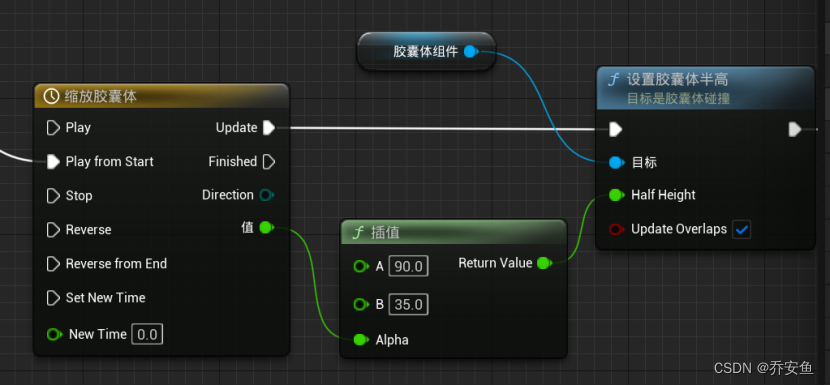
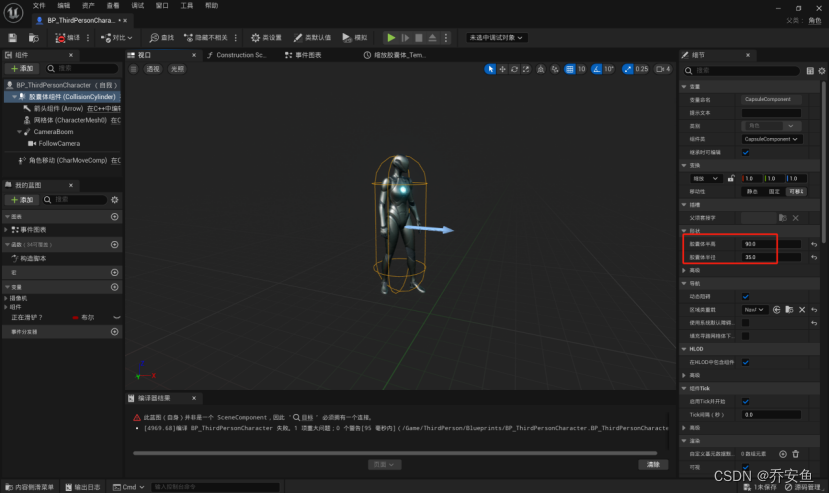
胶囊体大小在细节面板中看。
3.胶囊体随着滑铲缩小
网格体——设置相对位置Set relevant location
在视口中点击网格体,将动画模式改为使用动画资产,选取滑铲蒙太奇。
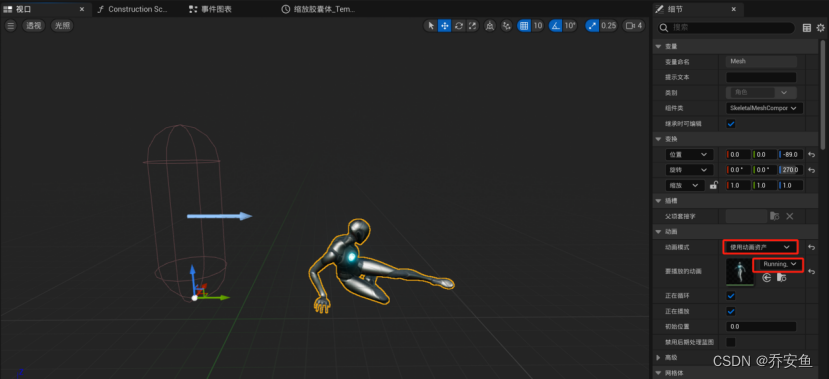
将胶囊体半高改为35,调整网格体的腿与胶囊体最下方对齐。
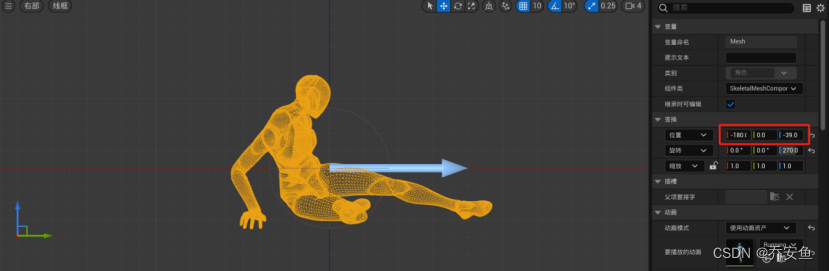
还原胶囊体高度和动画。
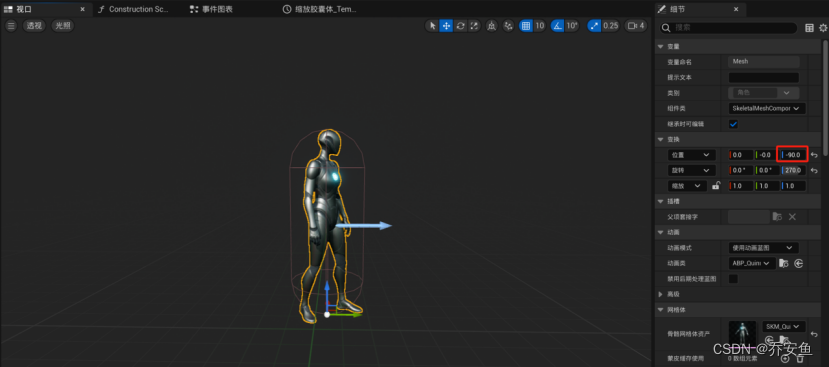
将两个高度数值填入相对位置的插值,作为胶囊体移动的高度变化范围。
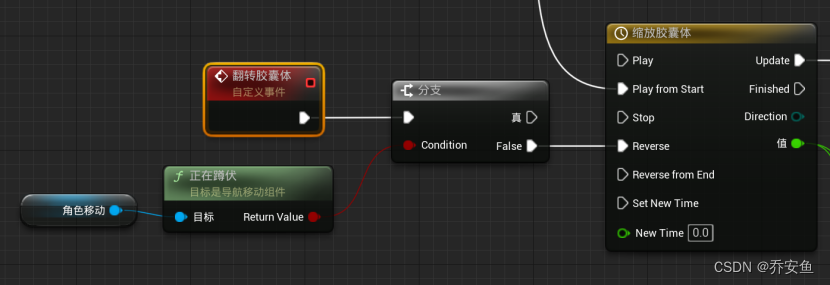
4.起身胶囊体恢复
在时间线前加一个事件。
创建自定义事件“反转胶囊体”——通过“角色移动”判断是否处于蹲伏状态——未蹲时,反转时间线timeline(即胶囊体恢复为90)
五、滑铲时是否在地板上
通过玩家手部胶囊体检测判断人物是否与地板对齐。
通过胶囊体检测玩家滑铲时是否在地面上,如果掉落则停止滑铲、停止播放滑铲动作。
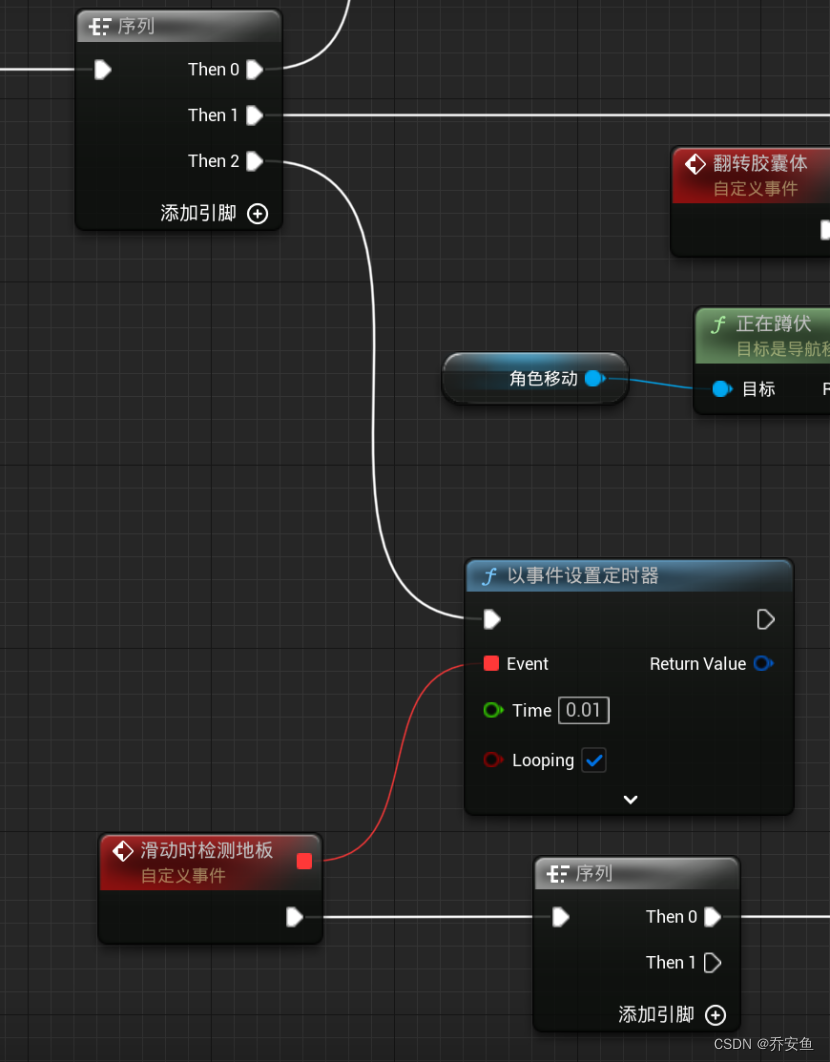
1.滑铲检测事件
添加一个序列,用于检测玩家是否处于滑铲中。
创建一个自定义事件“滑铲时检测地板”——以事件设置定时器set timer by event,time设置为0.01,勾选循环looping(每0.01秒运行一次)——新建序列。
2.创建宏进行检测
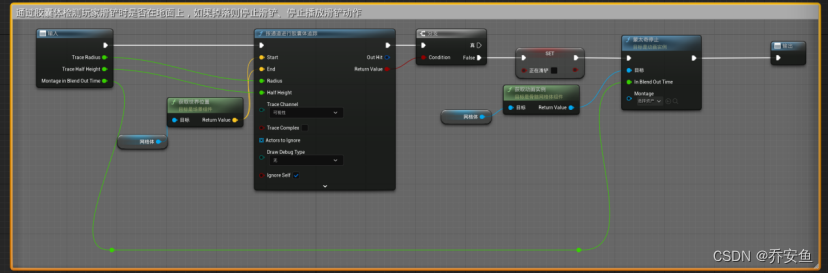
创建宏Macros:检测玩家是否在地板上——滑铲时手在地板上、是否掉落。
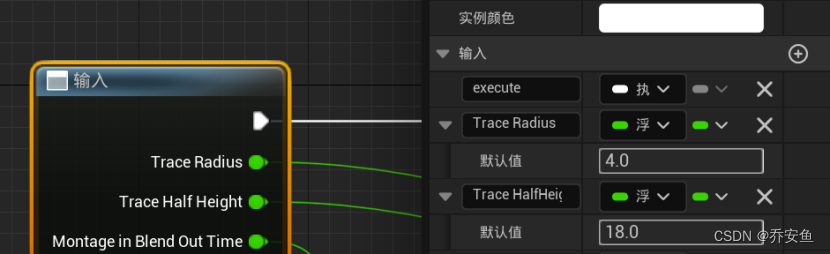
按通道进行胶囊体追踪Capsule trace by channel——获取网格体的世界位置作为检测起始点,检测半径和半高作为输入
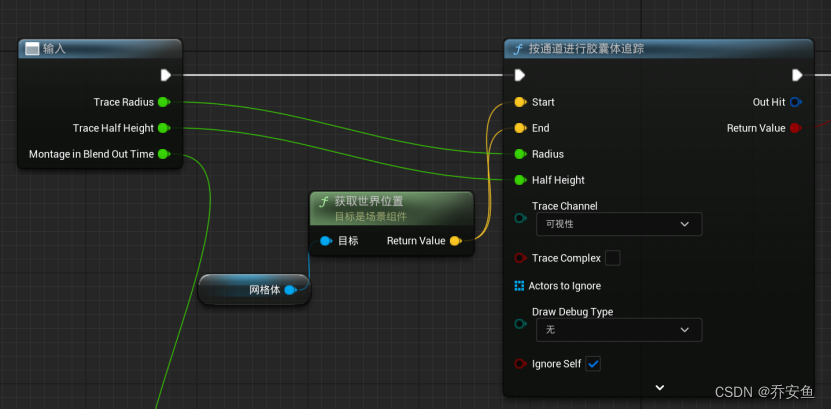
检测半径默认值设为4,检测半高默认值设为18.
当检测不到时,即滑铲停止——停止播放蒙太奇动画——输出
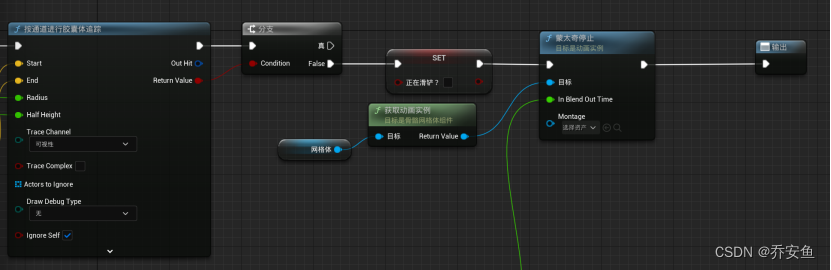
Blend out Time作为输入值,默认值为0.2.
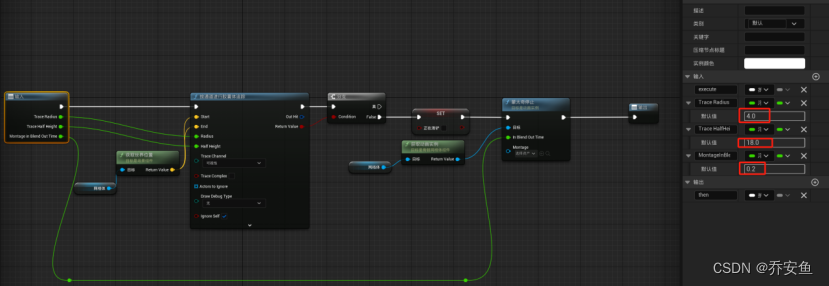
完整如下:
3.滑铲停止
将定时器返回值提升为变量“滑铲追踪句柄”。
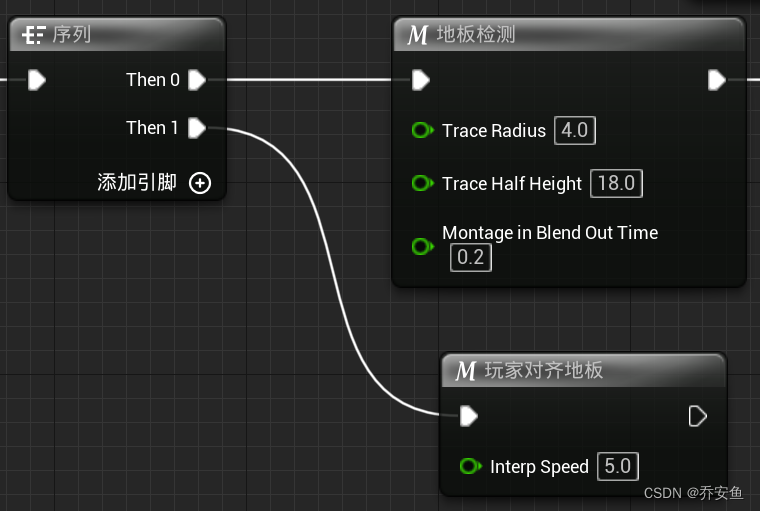
将宏拖入并连接序列0——地板检测结束后——通过滑铲追踪句柄使定时器失效(重置定时器)。
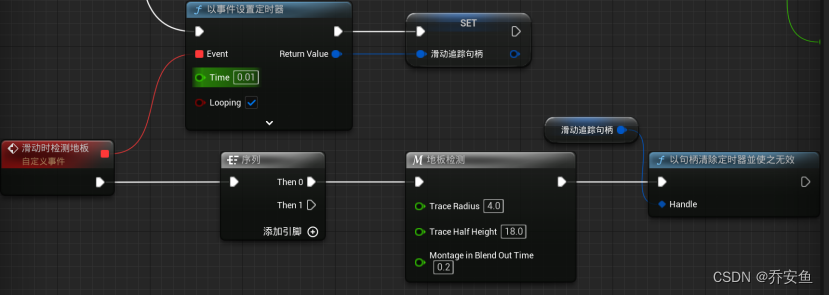
整理一下:开始滑铲检测地板事件后,每0.01s检测一次玩家是否在滑铲,若未检测到碰撞(地板),则玩家不处于滑铲状态、停止播放滑铲动画蒙太奇、停止检测。
六、玩家与地板对齐
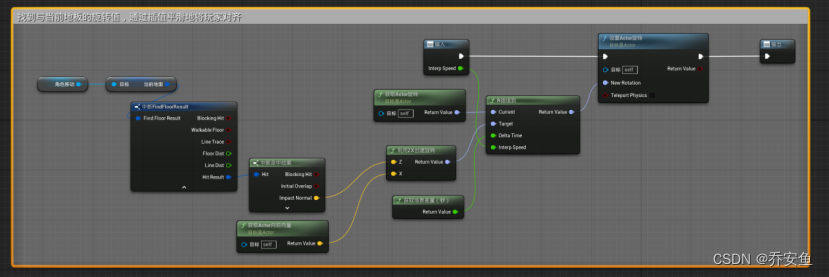
找到与当前地板的旋转值,通过插值平滑地将玩家对齐。
1.创建宏玩家对齐地板

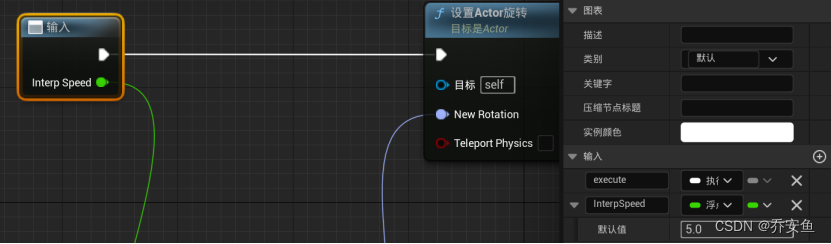
在宏中设置Actor旋转set Actor rotation。
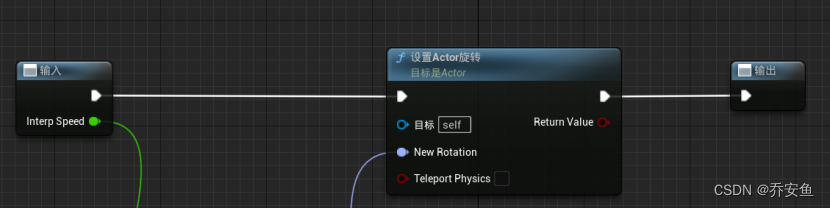
设置new rotation旋转参数。
角色运动character movement——获得当前地板信息get current floor——中断Finding Floor result——中断hit result——impact normal地板法线作为“利用zx轴旋转Make Rot From ZX”的Z轴,获取玩家向前向量Get Actor forward vector作为X轴。
使用“R插值到RInterp to”创建平滑旋转:从玩家当前旋转角度,转到地板的平行角度,时间为场景差量Get world delta seconds(同步游戏时间),旋转速度Interp Speed作为输入值设为5.
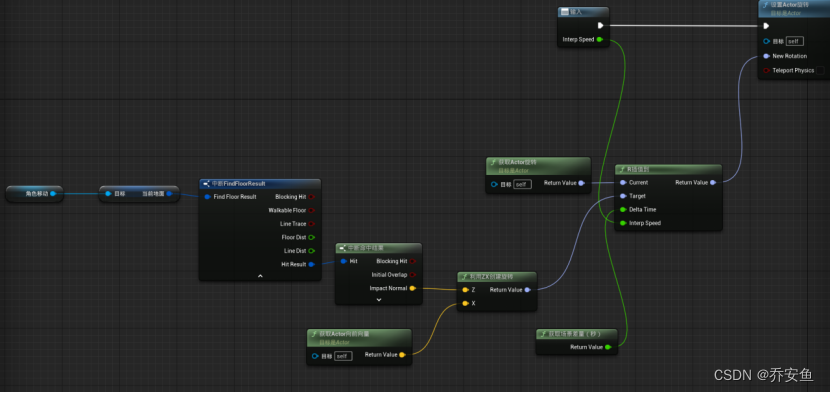
完整如下:
大致思路:通过玩家向前向量,和垂直地板向量,找到地板的角度,让玩家旋转到与地板平行。

2.触发对齐
序列1——执行宏
七、滑铲时是否与物体碰撞
避免滑铲时穿墙,对滑铲时最前面的脚进行球体检测,如果碰到墙,则停止滑行
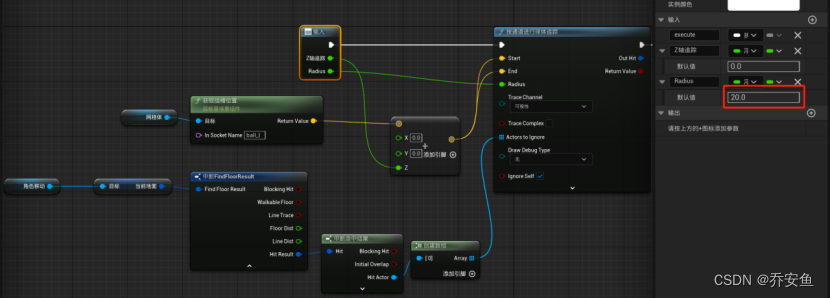
1.创建宏进行球体检测
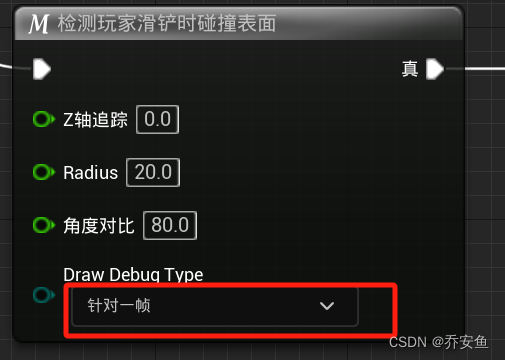
创建宏“检测玩家滑动时碰撞表面”。
输入——按通道进行球体追踪
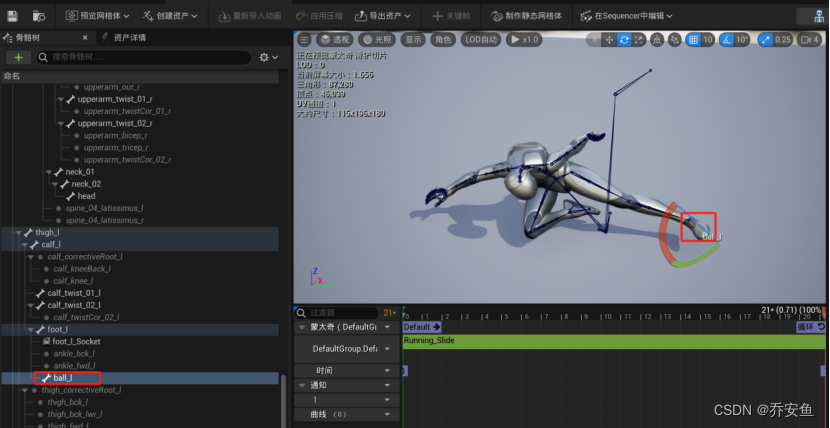
检测点:获取骨骼的插槽位置,插槽名为脚部的骨骼名ball_I——“+”向量相加函数,分割相加向量的结构体引脚,将Z向量作为输入,保持为0(可自行输入数值进行调试)
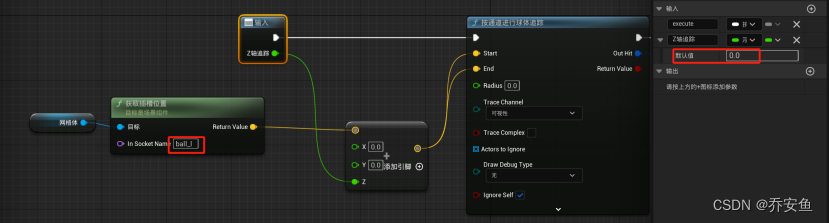
排除检测数组:将地板检测的那一段复制过来,将地面排除检测。
将检测半径作为输入,默认值=20
2.条件判断
是否击中:检测的返回值若为“真”,则进行下一个判断。
击中的物体是否与地面垂直:中断检测的命中结果(out hit)——获取法线向量(Impact Normal)——乘以向量(0,0,1)“dot product”——反余弦Acos degree——获取绝对值——若击中角度>80——输出
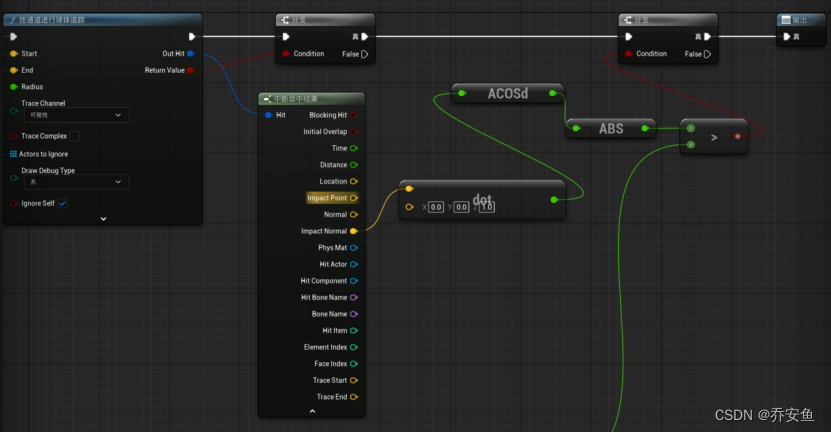
将对比角度作为输入,默认值80


3.调用宏
序列2连接宏“检测玩家滑铲时碰撞表面”——将上面的使定时器失效复制过来。
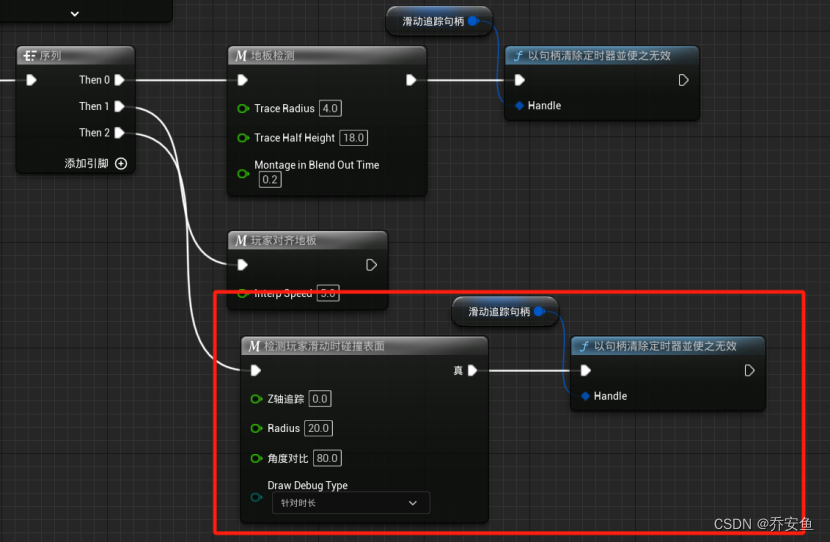
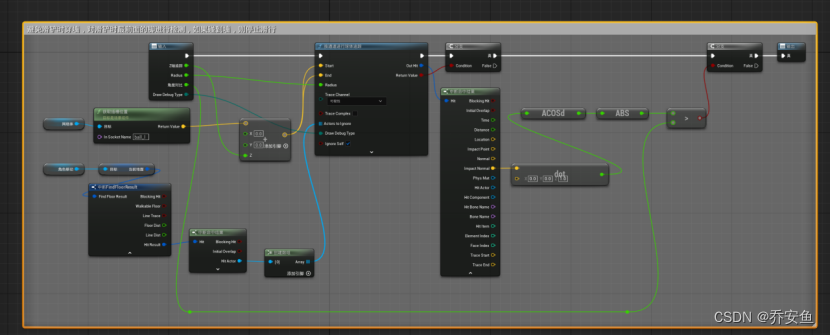
完整如下:
4.调试
为了便于调试,将球体检测的Draw Debug Type作为输入。
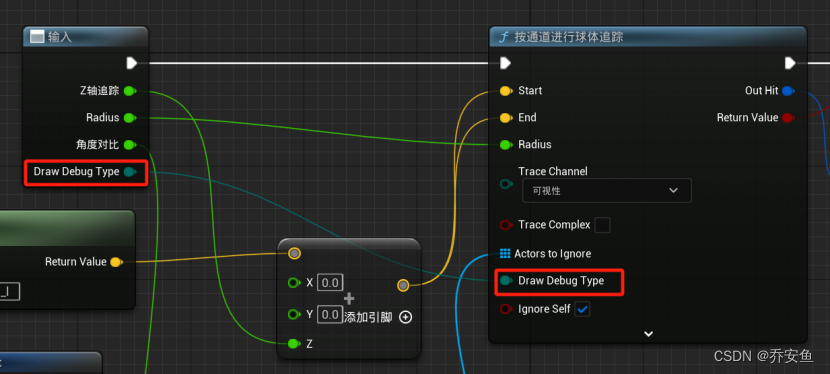
在宏界面选择类型:针对一帧For One Frame
滑铲时就可以看到脚部的运动轨迹。

滑铲的蓝图就建好了,全选后右键添加注释“滑铲”。
八、是否持续滑铲
在这里完成两个逻辑:
- 停止滑铲
- 当玩家在斜坡上滑动时,可以持续滑动完整个斜坡。
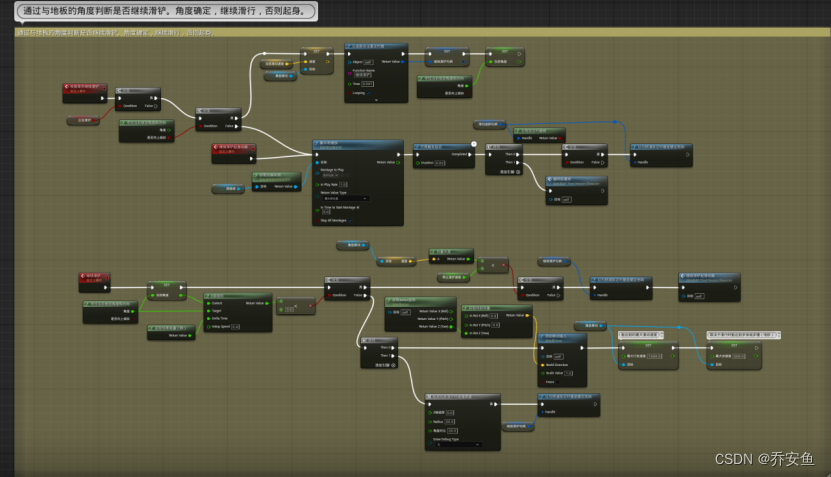
通过与地板的角度判断是否继续滑铲。角度确定,继续滑行,否则起身。
1.建立蒙太奇通知
通知notify:通过动画调用动画蓝图,在动画蓝图中调用角色蓝图。
滑铲动画快结束时通过蒙太奇通知在动画蓝图中计算速度、调用角色蓝图进行判定是否继续滑铲。
创建“当前滑动速度”向量。
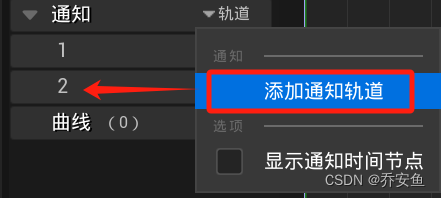
打开滑铲蒙太奇动画——添加一个通知轨道
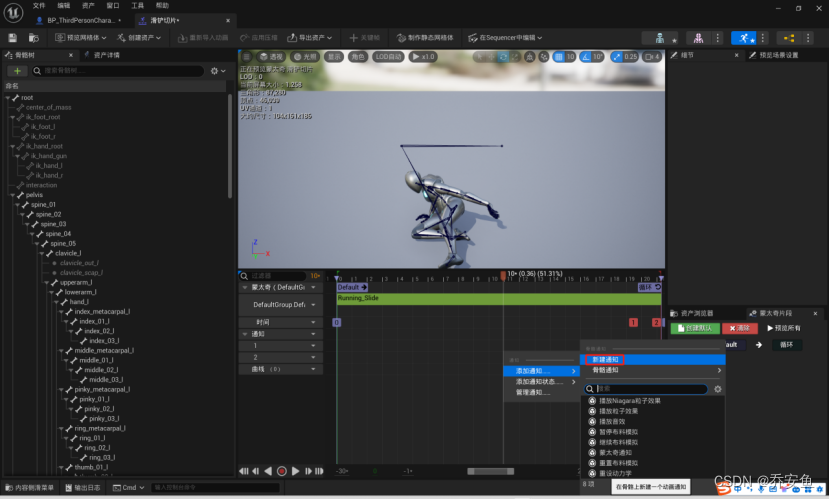
在轨道中新建通知Notify“计算速度”,并将该通知放在最后一帧前面。
然后再新建一个通知“查看是否滑铲”,将该通知放在最后一帧。

2.设置滑动速度
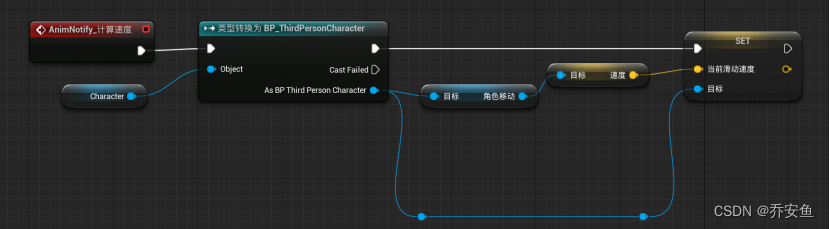
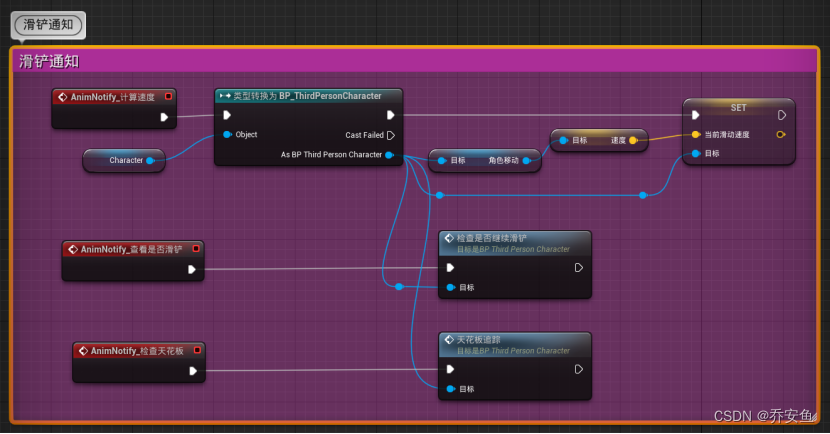
打开动画蓝图的事件图表——新建“AnimNotify_计算速度”事件
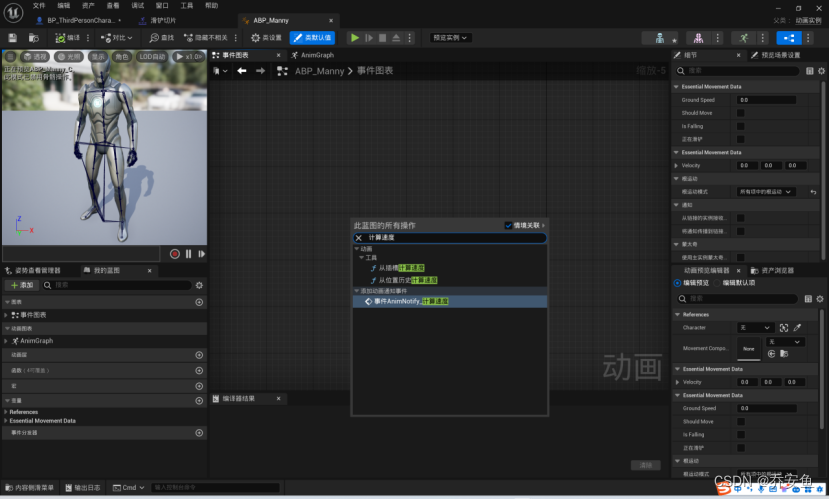
将“预览实例”改为“未选中调试对象”(不知道有什么用)。
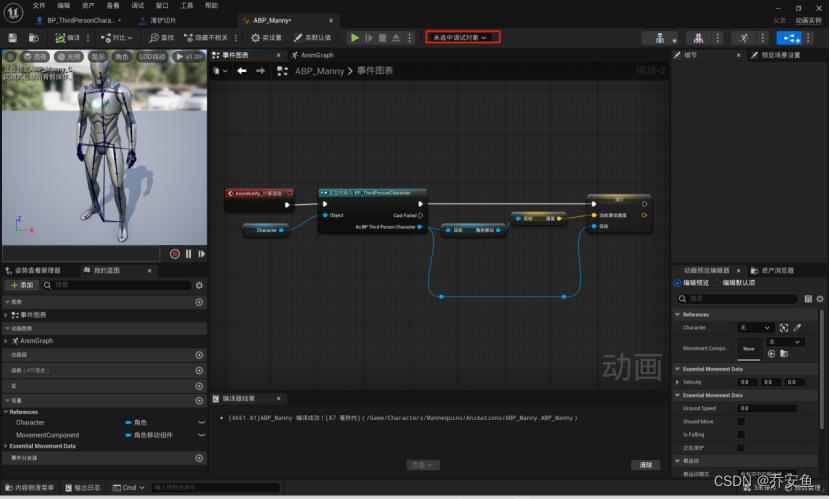
获取角色的character movement——get velocity——set 当前滑动速度,滑动速度=当前角色速度
在人物蓝图中新建一个自定义事件“检查是否继续滑铲”。
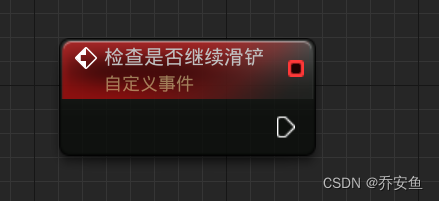
是否继续滑铲=是否滑铲。
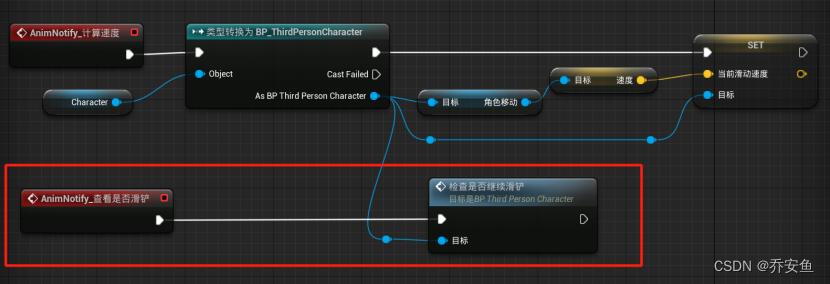
在动画蓝图中,新建“AnimNotify_查看是否滑铲”事件——调用刚才创建的事件“检查是否继续滑铲”。
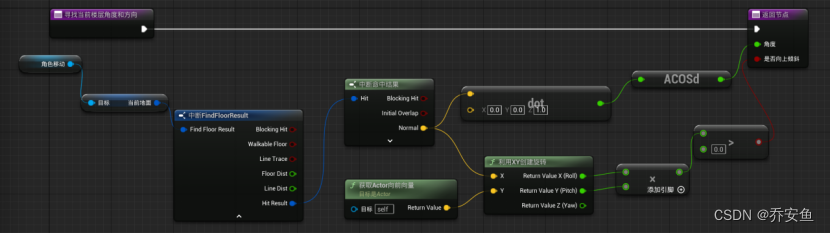
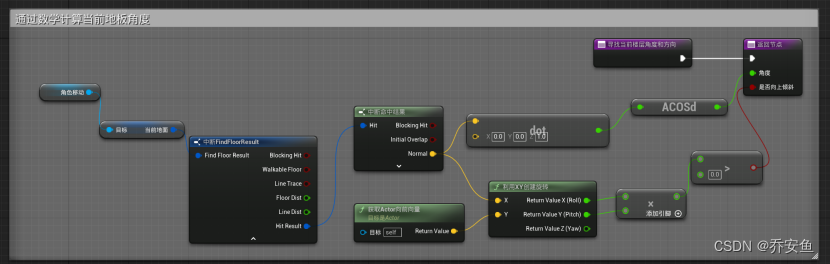
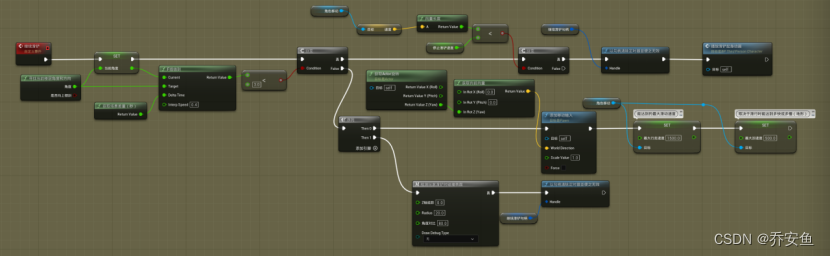
3.检测地面角度函数
创建函数“寻找当前楼层角度和方向”——返回节点return node,将对齐地板宏中的中断floor结果那一段复制过来。
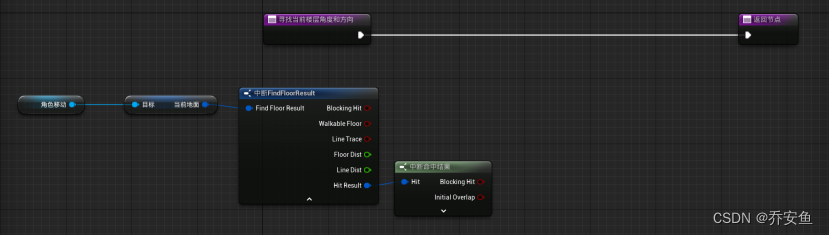
中断命中结果的normal与向量(0,0,1)相乘——获取逆角度,作为返回节点的“角度”输出值。
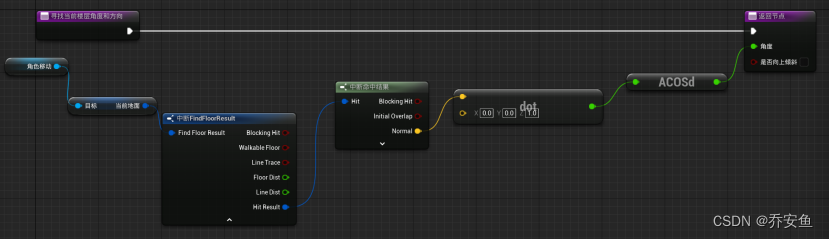
Normal作为X旋转轴,向前向量作为Y轴,利用XY创建旋转Make rot from XY——分割返回值引脚,X轴的返回值*Y轴返回值——乘积>0,是否向上倾斜Is slope up=真,作为返回节点输出值。
4.是否继续滑铲事件
回到角色蓝图,继续写之前的“检查是否继续滑铲事件”。
检查是否继续滑铲事件——正在滑铲为真——调用寻找当前楼层角度和方向函数。

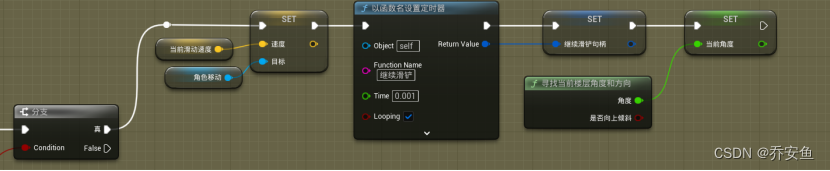
是否向上倾斜=真,斜坡——设置角色移动速度=当前滑动速度,当前滑动速度在动画蓝图中已经设置过,即滑铲结束时的速度—— 以函数名设置定时器,每0.001s循环“继续滑铲”事件(在后面写),返回值提升为变量“继续滑铲句柄”——调用寻找当前楼层角度和方向函数,当前角度提升为变量。
复制一个滑铲蒙太奇,删掉通知1、2,将开始时间设为滑铲开始0.71s,结束时间设置为站起来1.53s。这样就是一个倒放的滑铲动画,玩家从滑铲起身。
注意:“选取下一个片段”不要选循环,不然会一直重复播放。
是否向上倾斜=假,平地——播放滑铲起身动画自定义事件——播放滑铲起身蒙太奇——延迟0.02s——序列
序列0——滑动追踪句柄是否有效Is valid——为真,使句柄无效,停止地板检测。
序列1——翻转胶囊体事件。
完整如下:
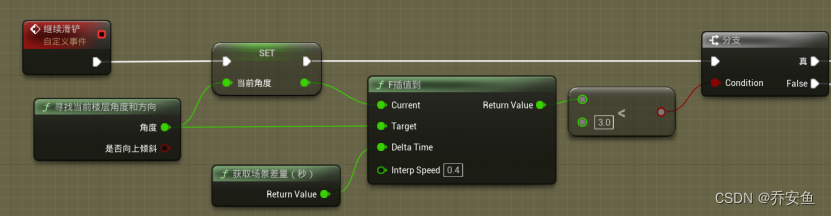
5.继续滑铲事件
- 平地,速度不够时停止
- 斜坡,加速
继续滑铲自定义事件——调用寻找当前楼层角度和方向函数,当前角度=角度——将F插值于Finterp to(平滑过度),当前=当前角度、目标=角度、delta time=获取场景差量Get world Delta seconds、Interp speed=0.4——判定插值后的角度<3?
角度<3,平地——创建变量“停止滑铲速度”,默认值50——角色速度<停止滑铲速度时,清除继续滑铲句柄,播放起身动画。

角度>=3,斜坡——序列
序列0——获取Actor旋转,获取向前向量。分割这两个结构引脚,Z轴相连——添加移动输入,世界方向=Z轴方向——设置最大滑铲速度=1500——设置最大滑铲加速度=500
序列1——检测玩家滑铲时碰撞表面宏——为真,撞墙——清除继续滑铲句柄

完整如下:
是否持续滑铲整个蓝图如下:
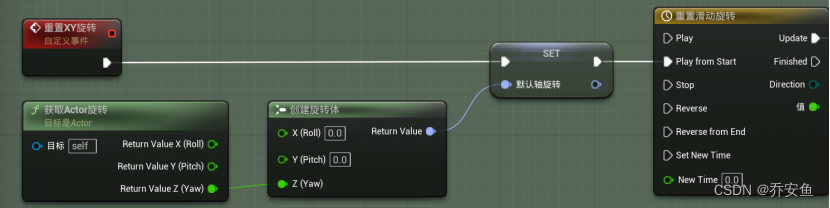
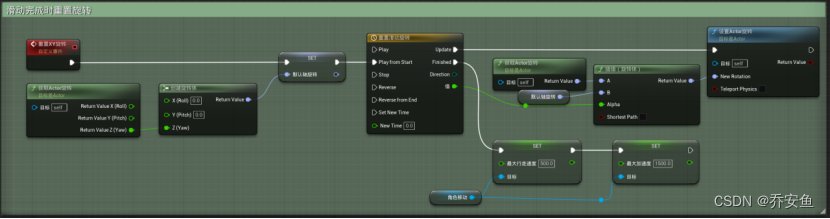
6.滑铲后重置旋转
滑铲后重置旋转,让玩家面对正前方。
自定义事件“重置旋转体”——获取Actor旋转Get Actor Rotation,提升返回值引脚,将Z轴“创建旋转体Create Rotator”,将旋转体的返回值提升为变量“默认轴旋转Defualt Yaw rotaion”——复制胶囊体的时间轴改名为“重置滑铲旋转”,旋转体连接时间轴的play from start
时间轴的update——设置Actor旋转,new rotation拉出新建“插值(旋转体)Lerp”——Lerp的alpha连接胶囊体的“值”,A连接获取Actor旋转,B连接变量“默认轴旋转”。
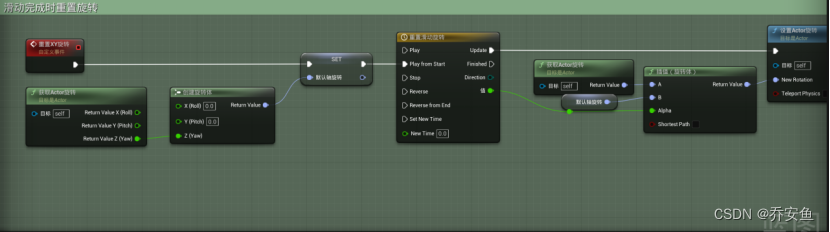
复制滑铲时设置速度和加速度,最大行走速度=500,最大加速度=1500——胶囊体finished连接
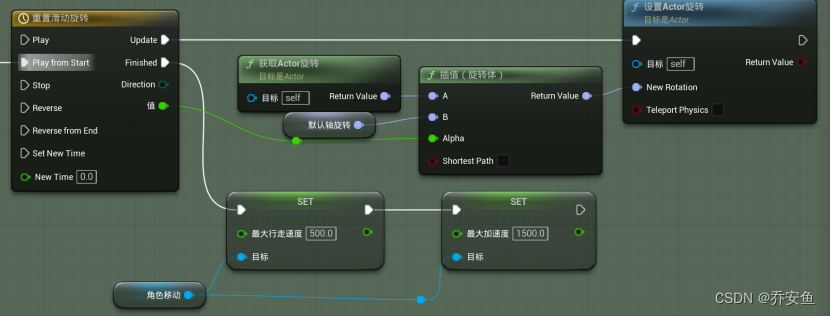
完整如下:
在“检查继续滑铲”事件的播放起身动画新增一个序列——调用“重置XY旋转”事件。
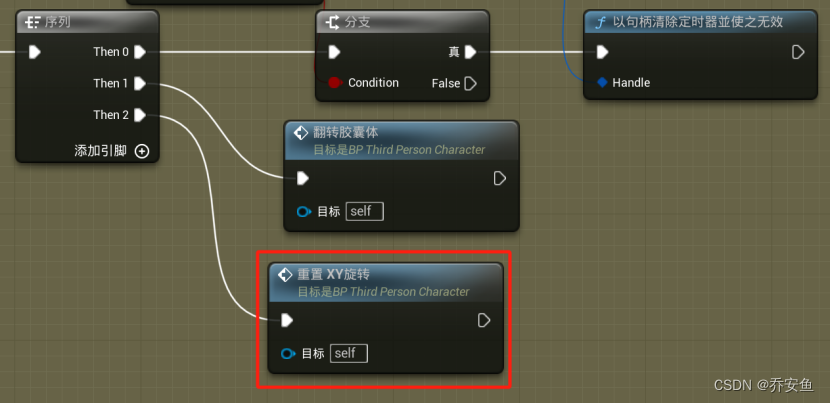
九、调整
在滑铲的“滑动时检测地板”的“地板检测”——判定“继续滑铲”句柄是否有效Is valid?
为真:清除继续滑铲句柄——翻转胶囊体——重置XY旋转
为假:翻转胶囊体——重置XY旋转
玩家在空中,则停止滑铲。

在检测玩家滑铲时碰撞表面——播放滑铲起身动画(玩家踢中物体则站起来)

十、滑铲结束时下蹲
当头顶空间不够时,玩家滑铲结束后要进入下蹲状态。
1.动画通知
在滑铲结束蒙太奇的第1帧添加通知“检查天花板”。
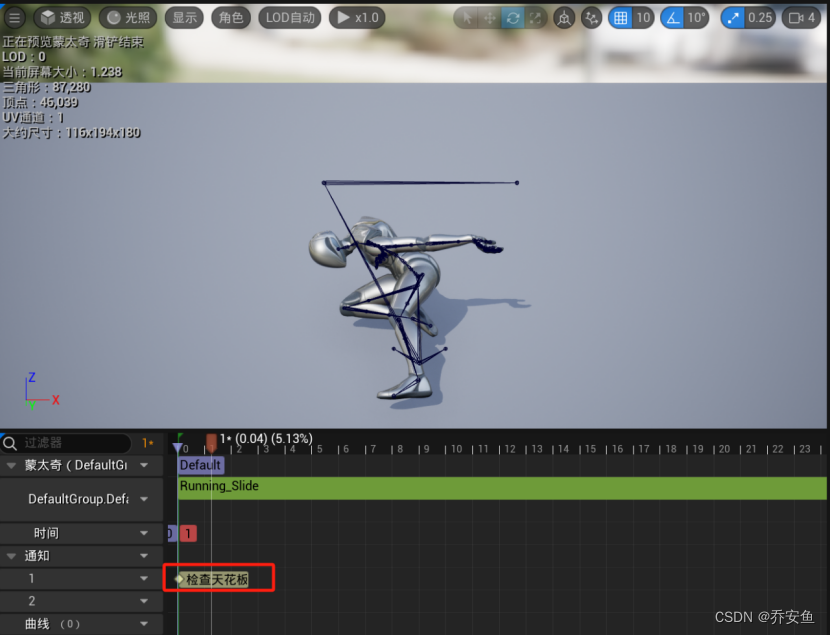
在人物蓝图中新建自定义事件“天花板追踪”

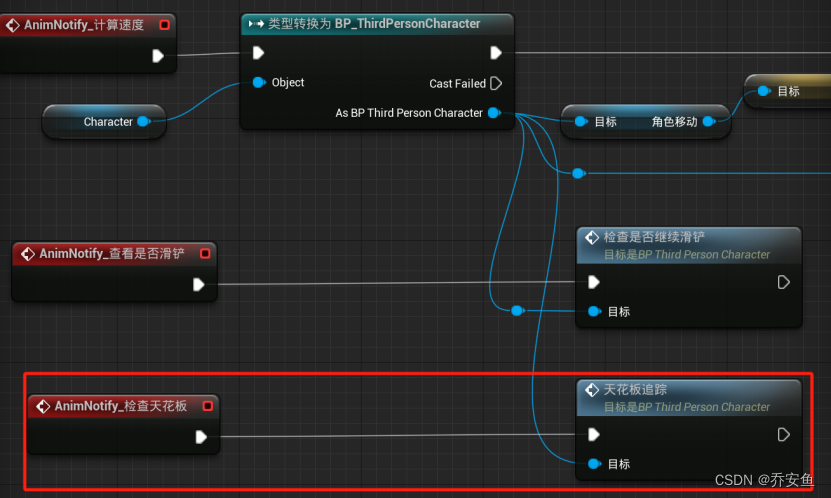
在动画蓝图中调用通知“检查天花板”——调用人物蓝图的“天花板追踪”事件。
2.下蹲
天花板追踪——按通道进行胶囊体追踪,起点和终点都=当前位置+70(z),半径=34,高度=50,trace channel=可见,actors to ignore=创建数组make array,draw debug type=每帧时长——如果检测到物体——判定character movement的is crouching正在蹲伏

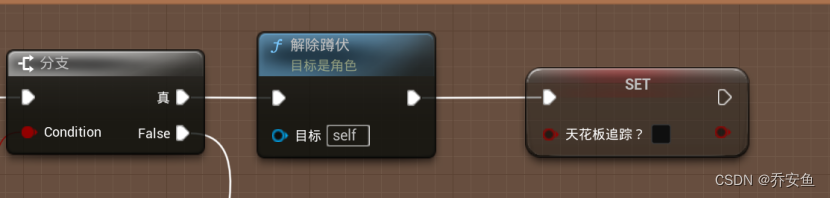
创建“天花板追踪?”变量。

天花板追踪=真——解除蹲伏un crouching——天花板追踪=假
天花板追踪=假——蹲伏is crouching——将“滑铲”逻辑中的获取动画实例复制过来,停止蒙太奇stop montage,in blend out time=0.2——天花板追踪=真

完整如下:

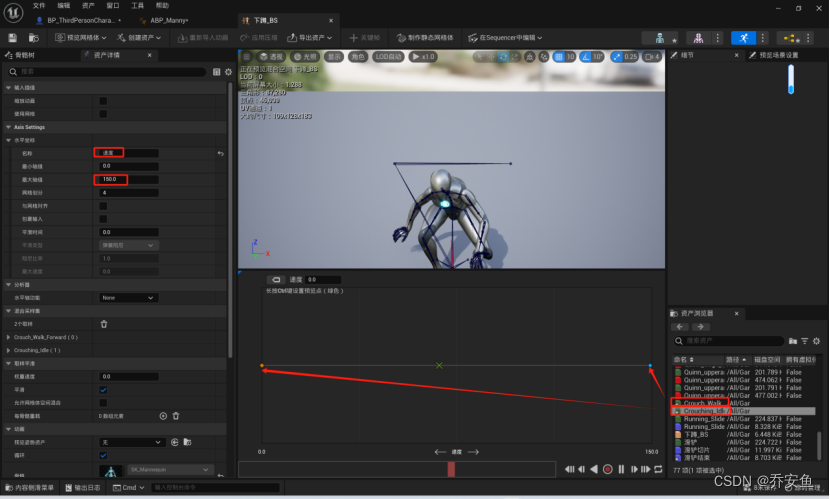
3.创建动画混合空间
创建动画>旧有>混合空间1D“下蹲_BS”

打开混合空间,水平坐标名称改为“速度”、最大速度=150。
将下蹲待机动画拖到第一帧,下蹲行走动画拖到最后一帧。
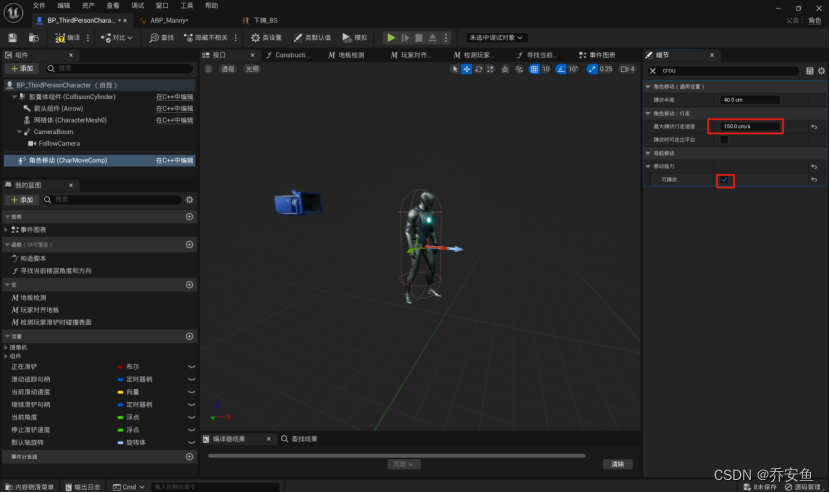
在人物蓝图>视口中点击角色移动chracter movement,在细节中修改:
可下蹲=true,最大蹲伏行走速度=150 cm/s
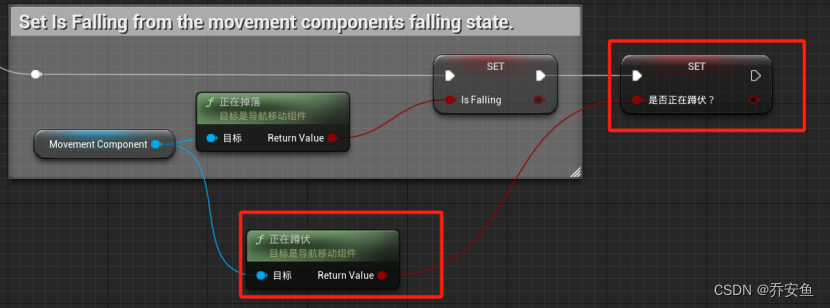
4.调整动画蓝图
在动画蓝图中,找到已有的蓝图。
Movement Component——正在蹲伏Is Crouching,提升为变量“是否正在蹲伏?”
在Locomotion状态机中创建按布尔混合姿势Blend pose by bool:
真姿势=下蹲混合动作、速度=ground speed;
假姿势=locomotion;
Active value=是否正在蹲伏?

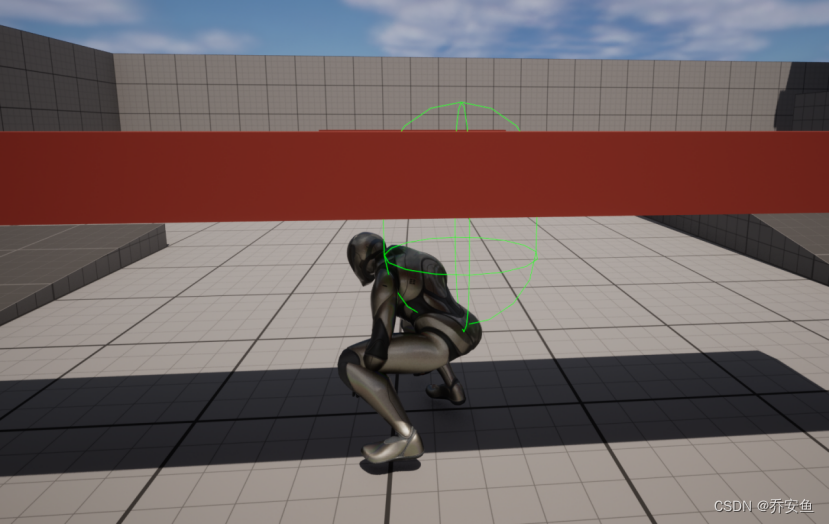
滑铲结束后,头顶有东西则下蹲。
5.退出下蹲状态
在原有蓝图Movement Input的最后面——若天花板追踪=真——调用天花板追踪事件。
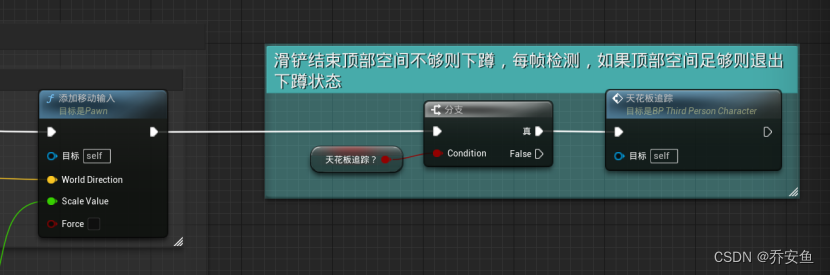
头顶无障碍自动站起。