目录
基础驱动实验:调速和换向
初始化工作
电机基础驱动API
电压、电流、温度检测实验
初始化工作
采集工作
编码器测速实验
编码器接口计数原理
初始化工作
编码器测速工作
速度环控制实现
PID相关函数
PID运算
电流环控制实现
PID相关函数
PID运算
位置环控制实现
PID相关函数
PID运算
速度+位置双环控制实现
PID相关函数
PID运算
电流+位置双环控制实现
PID相关函数
PID运算
电流+速度双环控制实现
PID相关函数
PID运算
电流+速度+位置三环控制实现
PID相关函数
PID运算
基础驱动实验:调速和换向
硬件资源:
TIM1_CH1 TIM1_CH1N SHDN刹车引脚 PA8 PB13 PF10
电路原理:
假设让TIM1_CH1输出PWM波,TIM1_CH1N固定输出高电平,此时只要调节TIM1_CH1输出的PWM占空比即可调整电机上的电压,进而控制电机的转速。
当电机需要换向时,我们就让TIM1_CH1固定输出高电平,TIM1_CH1N输出PWM波即可。

功能描述:
比较值变量的绝对值越大,电机速度越快。比较值变量正数为正转,负数反转。
按下KEY0,增大PWM的比较值变量。
按下KEY1,减小PWM的比较值变量。
按下KEY2,电机停止。
初始化工作
TIM_HandleTypeDef g_atimx_cplm_pwm_handle; /* 定时器x句柄 */ /** * @brief 高级定时器TIMX 互补输出 初始化函数(使用PWM模式1) * @note * 配置高级定时器TIMX 互补输出, 一路OCy 一路OCyN, 并且可以设置死区时间 * * 高级定时器的时钟来自APB2, 而PCLK2 = 168Mhz, 我们设置PPRE2不分频, 因此 * 高级定时器时钟 = 168Mhz * 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us. * Ft=定时器工作频率, 单位 : Mhz * * @param arr: 自动重装值。 * @param psc: 时钟预分频数 * @retval 无 */ void atim_timx_cplm_pwm_init(uint16_t arr, uint16_t psc) { TIM_OC_InitTypeDef sConfigOC ; TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig; g_atimx_cplm_pwm_handle.Instance = TIM1; /* 定时器x */ g_atimx_cplm_pwm_handle.Init.Prescaler = psc; /* 定时器预分频系数 */ g_atimx_cplm_pwm_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数模式 */ g_atimx_cplm_pwm_handle.Init.Period = arr; /* 自动重装载值 */ g_atimx_cplm_pwm_handle.Init.RepetitionCounter = 0; /* 重复计数器寄存器为0 */ g_atimx_cplm_pwm_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE; /* 使能影子寄存器TIMx_ARR */ HAL_TIM_PWM_Init(&g_atimx_cplm_pwm_handle) ; /* 设置PWM输出 */ sConfigOC.OCMode = TIM_OCMODE_PWM1; /* PWM模式1 */ sConfigOC.Pulse = 0; /* 比较值为0 */ sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW; /* OCy 低电平有效 */ sConfigOC.OCNPolarity = TIM_OCNPOLARITY_LOW; /* OCyN 低电平有效 */ sConfigOC.OCFastMode = TIM_OCFAST_ENABLE; /* 使用快速模式 */ sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; /* 主通道的空闲状态 */ sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; /* 互补通道的空闲状态 */ HAL_TIM_PWM_ConfigChannel(&g_atimx_cplm_pwm_handle, &sConfigOC, ATIM_TIMX_CPLM_CHY); /* 配置后默认清CCER的互补输出位 */ /* 设置死区参数,开启死区中断 */ sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_ENABLE; /* OSSR设置为1 */ sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE; /* OSSI设置为0 */ sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF; /* 上电只能写一次,需要更新死区时间时只能用此值 */ sBreakDeadTimeConfig.DeadTime = 0X0F; /* 死区时间 */ sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE; /* BKE = 0, 关闭BKIN检测 */ sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_LOW; /* BKP = 1, BKIN低电平有效 */ sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE; /* 使能AOE位,允许刹车后自动恢复输出 */ HAL_TIMEx_ConfigBreakDeadTime(&g_atimx_cplm_pwm_handle, &sBreakDeadTimeConfig); /* 设置BDTR寄存器 */ }atim_timx_cplm_pwm_init(8400 - 1, 0); /* 168 000 000 / 1 = 168 000 000 168Mhz的计数频率,计数8400次为50us */初始化主要分为三部分:
1、HAL_TIM_PWM_Init 函数初始化定时器参数,内部会调用HAL_TIM_PWM_MspInit 函数完成引脚配置。
2、HAL_TIM_PWM_ConfigChannel 函数定义定时器PWM1模式。
3、 HAL_TIMEx_ConfigBreakDeadTime 函数来设置死区参数。该实验没用到。
当PWM1递增模式,OCPolarity为低电平,OCNPolarity为低电平,8400的重装载值,比较值为1680。不开主通道,互补通道0.2低,0.8高。主通道高电平。
当PWM1递增模式,OCPolarity为低电平,OCNPolarity为低电平,8400的重装载值,比较值为1680。不开互补通道,主通道0.2低,0.8高。互补通道高电平。
不管上面哪种情况,调大占空比,低电平变宽,转速变快。
电机基础驱动API
电机开启:SD引脚拉高。
电机停止:关闭主通道和互补通道输出,SD引脚拉低。
HAL_TIM_PWM_Stop(&g_atimx_cplm_pwm_handle, TIM_CHANNEL_1); /* 关闭主通道输出 */ HAL_TIMEx_PWMN_Stop(&g_atimx_cplm_pwm_handle, TIM_CHANNEL_1); /* 关闭互补通道输出 */
电机旋转方向设置:
关闭主通道和互补通道输出,参数0开启主通道输出。
关闭主通道和互补通道输出,参数1开启互补通道输出。
HAL_TIM_PWM_Start(&g_atimx_cplm_pwm_handle, TIM_CHANNEL_1); /* 开启主通道输出 */ HAL_TIMEx_PWMN_Start(&g_atimx_cplm_pwm_handle, TIM_CHANNEL_1); /* 开启互补通道输出 */
电机速度控制:先判断参数是否小于重装载值,符合则设置参数为比较值。
if (para < (__HAL_TIM_GetAutoreload(&g_atimx_cplm_pwm_handle) - 0x0F)) /* 限速 */ { __HAL_TIM_SetCompare(&g_atimx_cplm_pwm_handle, TIM_CHANNEL_1, para); }调大比较值,转速就加快。
电机控制:电机旋转方向设置+电机速度控制。motor_pwm_set(float para)。para可正可负。
电压、电流、温度检测实验
电压采集电路:
由于直流有刷电机驱动板的电源电压远超STM32内部ADC所能采集的范围,并不能直接使用ADC进行电压采集,因此需要使用一些硬件电路对电源电压进行处理,使其减小到ADC采集范围。
电流采集电路:
由于STM32内部ADC并不能对电流进行采集,所以需要先把电流的信号转换为电压的信号。
在H桥中加入了一个20mR(0.02R)的采样电阻,这样子就可以得到一个采样电压I-V = 0.02R * 实际电流I。
但是这个采样电压太小了,直接用ADC进行采集的话偏差较大,所以需要对它进行差分放大。

温度采集电路:
利用NCP18XH103F03RB热敏电阻对温度进行检测,该热敏电阻是负温度系数电阻,温度越高,其电阻值越低。

硬件资源:
ADC1_CH0 ADC1_CH8 ADC1_CH9 PA0 PB0 PB1 温度检测引脚 电流检测引脚 电压检测引脚
初始化工作
初始化工作为ADC+DMA的初始化。转换顺序为电压-温度-电流。
#define ADC_ADCX_CH0 ADC_CHANNEL_9 /* 电压测量通道 */
#define ADC_ADCX_CH1 ADC_CHANNEL_0 /* 温度测量通道 */
#define ADC_ADCX_CH2 ADC_CHANNEL_8 /* 电流测量通道 */
/**
* @brief ADC初始化函数
* @param 无
* @retval 无
*/
void adc_init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
g_adc_nch_dma_handle.Instance = ADC1; /* ADCx */
g_adc_nch_dma_handle.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4; /* 4分频,ADCCLK = PCLK2/4 = 84/4 = 21Mhz */
g_adc_nch_dma_handle.Init.Resolution = ADC_RESOLUTION_12B; /* 12位模式 */
g_adc_nch_dma_handle.Init.ScanConvMode = ENABLE; /* 扫描模式 多通道使用 */
g_adc_nch_dma_handle.Init.ContinuousConvMode = ENABLE; /* 连续转换模式,转换完成之后接着继续转换 */
g_adc_nch_dma_handle.Init.DiscontinuousConvMode = DISABLE; /* 禁止不连续采样模式 */
g_adc_nch_dma_handle.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE; /* 使用软件触发 */
g_adc_nch_dma_handle.Init.ExternalTrigConv = ADC_SOFTWARE_START; /* 软件触发 */
g_adc_nch_dma_handle.Init.DataAlign = ADC_DATAALIGN_RIGHT; /* 右对齐 */
g_adc_nch_dma_handle.Init.NbrOfConversion = ADC_CH_NUM; /* 使用转换通道数,需根据实际转换通道去设置 */
g_adc_nch_dma_handle.Init.DMAContinuousRequests = ENABLE; /* 开启DMA连续转换请求 */
g_adc_nch_dma_handle.Init.EOCSelection = ADC_EOC_SEQ_CONV;
HAL_ADC_Init(&g_adc_nch_dma_handle);
/* 配置使用的ADC通道,采样序列里的第几个转换,增加或者减少通道需要修改这部分 */
sConfig.Channel = ADC_ADCX_CH0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_480CYCLES;
HAL_ADC_ConfigChannel(&g_adc_nch_dma_handle, &sConfig);
sConfig.Channel = ADC_ADCX_CH1;
sConfig.Rank = 2;
HAL_ADC_ConfigChannel(&g_adc_nch_dma_handle, &sConfig);
sConfig.Channel = ADC_ADCX_CH2;
sConfig.Rank = 3;
HAL_ADC_ConfigChannel(&g_adc_nch_dma_handle, &sConfig);
}#define ADC_CH_NUM 3 /* 需要转换的通道数目 */
#define ADC_COLL 1000 /* 单采集次数 */
#define ADC_SUM ADC_CH_NUM * ADC_COLL /* 总采集次数 */
uint16_t g_adc_value[ADC_SUM] = {0}; /* 存储ADC原始值 */
uint16_t g_adc_val[ADC_CH_NUM]; /* ADC平均值存放数组 */
HAL_ADC_Start_DMA(&g_adc_nch_dma_handle, (uint32_t *)g_adc_value, ADC_SUM); /* 开启ADC的DMA传输 *//**
* @brief ADC 采集中断服务回调函数
* @param 无
* @retval 无
*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
if (hadc->Instance == ADC_ADCX)
{
HAL_ADC_Stop_DMA(&g_adc_nch_dma_handle); /* 关闭DMA转换 */
calc_adc_val(g_adc_val); /* 计算ADC的平均值 */
HAL_ADC_Start_DMA(&g_adc_nch_dma_handle, (uint32_t *)&g_adc_value, (uint32_t)(ADC_SUM)); /* 启动DMA转换 */
}
}
/**
* @brief 计算ADC的平均值(滤波)
* @param * p :存放ADC值的指针地址
* @note 此函数对电压、温度、电流对应的ADC值进行滤波,
* p[0]-p[2]对应的分别是电压、温度和电流
* @retval 无
*/
void calc_adc_val(uint16_t * p)
{
uint32_t temp[3] = {0,0,0};
int i;
for(i=0; i<ADC_COLL; i++) /* 循环ADC_COLL次取值,累加 */
{
temp[0] += g_adc_value[0 + i * ADC_CH_NUM];
temp[1] += g_adc_value[1 + i * ADC_CH_NUM];
temp[2] += g_adc_value[2 + i * ADC_CH_NUM];
}
temp[0] /= ADC_COLL; /* 取平均值 */
temp[1] /= ADC_COLL;
temp[2] /= ADC_COLL;
p[0] = temp[0]; /* 存入电压ADC通道平均值 */
p[1] = temp[1]; /* 存入温度ADC通道平均值 */
p[2] = temp[2]; /* 存入电流ADC通道平均值 */
}初始化工作主要分为四部分:
1、开时钟,引脚初始化。
2、HAL_ADC_Init函数初始化ADC基础参数,HAL_ADC_ConfigChannel函数配置ADC使用通道。
3、HAL_DMA_Init函数初始化DMA通道,__HAL_LINKDMA函数关联ADC和DMA。
4、开启DMA中断,HAL_ADC_Start_DMA函数开启ADC的DMA传输。
ADC转换完成中断中,先关闭DMA传输,然后进行ADC值取平均,再开始DMA传输。calc_adc_val函数就是取g_adc_value的平均值,然后存入g_adc_val。
采集工作
电压采集:
/* 电压计算公式: * V_POWER = V_BUS * 25 * ADC值转换为电压值:电压=ADC值*3.3/4096 * 整合公式可以得出电压V_POWER= ADC值 *(3.3f * 25 / 4096) */ #define ADC2VBUS (float)(3.3f * 25 / 4096) printf("Valtage:%.1fV \r\n", g_adc_val[0]*ADC2VBUS); /* 打印电压值*/
温度采集:
/* Rt = Rp *exp(B*(1/T1-1/T2)) Rt 是热敏电阻在T1温度下的阻值; Rp是热敏电阻在T2常温下的标称阻值; exp是e的n次方,e是自然常数,就是自然对数的底数,近似等于 2.7182818; B值是热敏电阻的重要参数,教程中用到的热敏电阻B值为3380; 这里T1和T2指的是开尔文温度,T2是常温25℃,即(273.15+25)K T1就是所求的温度 */ const float Rp = 10000.0f; /* 10K */ const float T2 = (273.15f + 25.0f); /* T2 */ const float Bx = 3380.0f; /* B */ const float Ka = 273.15f; /** * @brief 计算温度值 * @param para: 温度采集对应ADC通道的值(已滤波) * @note 计算温度分为两步: 1.根据ADC采集到的值计算当前对应的Rt 2.根据Rt计算对应的温度值 * @retval 温度值 */ float get_temp(uint16_t para) { float Rt; float temp; /* 第一步: Rt = 3.3 * 4700 / VTEMP - 4700 ,其中VTEMP就是温度检测通道采集回来的电压值,VTEMP = ADC值* 3.3/4096 由此我们可以计算出当前Rt的值:Rt = 3.3f * 4700.0f / (para * 3.3f / 4096.0f ) - 4700.0f; */ Rt = 3.3f * 4700.0f / (para * 3.3f / 4096.0f ) - 4700.0f; /* 根据当前ADC值计算出Rt的值 */ /* 第二步: 根据当前Rt的值来计算对应温度值:Rt = Rp *exp(B*(1/T1-1/T2)) */ temp = Rt / Rp; /* 解出exp(B*(1/T1-1/T2)) ,即temp = exp(B*(1/T1-1/T2)) */ temp = log(temp); /* 解出B*(1/T1-1/T2) ,即temp = B*(1/T1-1/T2) */ temp /= Bx; /* 解出1/T1-1/T2 ,即temp = 1/T1-1/T2 */ temp += (1.0f / T2); /* 解出1/T1 ,即temp = 1/T1 */ temp = 1.0f / (temp); /* 解出T1 ,即temp = T1 */ temp -= Ka; /* 计算T1对应的摄氏度 */ return temp; /* 返回温度值 */ } printf("Temp:%.1fC \r\n", get_temp(g_adc_val[1])); /* 打印温度值*/
电流采集:
/* 电流计算公式: * I=(最终输出电压-初始参考电压)/(6*0.02)A * ADC值转换为电压值:电压=ADC值*3.3/4096,这里电压单位为V,我们换算成mV,4096/1000=4.096,后面就直接算出为mA * 整合公式可以得出电流 I= (当前ADC值-初始参考ADC值)* (3.3 / 4.096 / 0.12) */ #define ADC2CURT (float)(3.3f / 4.096f / 0.12f) uint16_t init_adc_val; /* init_adc_val存储电流测量对应的参考电压ADC值,这里进行滤波 */ init_adc_val = g_adc_val[2]; /* 取出第一次得到的值 */ for(t=0;t<1000;t++) { init_adc_val += g_adc_val[2]; /* 现在的值和上一次存储的值相加 */ init_adc_val /= 2; /* 取平均值 */ delay_ms(1); } printf("Current:%.1fmA \r\n", abs(g_adc_val[2]-init_adc_val)*ADC2CURT); /* 打印电流值*/
编码器测速实验
正点原子的直流有刷电机编码器使用的是磁电增量式编码器,安装在直流有刷电机的尾部,分辨率是11线。
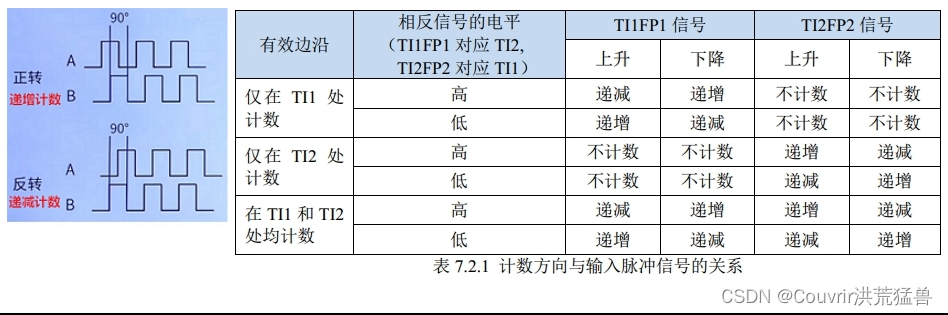
正点原子的直流有刷电机编码器有A、B两相,它们会输出两个相位差为90°的脉冲。当电机正转时,A相脉冲在前;当电机反转时,B相脉冲在前。
STM32定时器的编码器接口模式相当于带有方向选择的外部时钟。在此模式下,外部输入的脉冲信号可以作为计数器的时钟,而计数的方向则是由脉冲相位的先后所决定。
A、B两相脉冲信号从TIMx_CH1和TIMx_CH2这两个通道输入,经过滤波器和边沿检测器(可以设置滤波和反相)的处理,进入到编码器接口控制器中。
Tips:TIMx_CH1和TIMx_CH2这两个通道才支持编码器功能,TIMx_CH3和TIMx_CH4这两个通道不支持。
硬件资源:
TIM3_CH1 TIM3_CH2 TIM6 PC6 PC7 中断计算速度 TIM3编码器A相输入通道 TIM3编码器B相输入通道
编码器接口计数原理
编码器接口可以利用输入脉冲的边沿进行计数,通过计数值的变化量可以算出输入脉冲信号的变化量,也就可以计算出电机的转速。
TIMx从模式控制寄存器(TIMx_SMCR)的0~2位:SMS[2:0]为从模式选择,控制边沿检测的方式。
选择外部信号时,触发信号(TRGI)的有效边沿与外部输入上所选的极性相关。
001:编码器模式1-计数器根据TI1FP1电平在TI2FP2边沿递增/递减计数。
010:编码器模式2-计数器根据TI2FP2电平在TI1FP1边沿递增/递减计数。
011:编码器模式3-计数器根据TI1FP1和TI2FP2的边沿计数,计数的方向取决于另外一个信号的电平。
Tips:
选择仅在TI1或TI2处计数,就相当于对脉冲信号进行了2倍频(上身沿和下降沿),如果编码器输出11个脉冲信号,那么就会计数22次。
选择在TI1和TI2处均计数,就相当于对脉冲信号进行了4倍频(上身沿和下降沿),如果编码器输出11个脉冲信号,那么就会计数44次。
因此可以我们通过计数次数来计算电机速度时,需要除以相应的倍频系数。至此,A、B两相脉冲信号的变化就转换成了定时器的计数变化。
可以通过一分钟内计数的变化量来计算电机速度:
电机转速 = 一分钟内计数的变化量 / 倍频系数 / 编码器线数 / 减速比
编码器模式1:仅在TI1处计数--计数器根据TI1FP1电平在TI2FP2边沿递增/递减计数。
假设把A相接在CH1(TI1),B相接在CH2(TI2),选择仅在TI1处计数(仅检测A相边沿)。脉冲信号会有两种,当编码器正转时A相在前、当编码器反转时B相在前。
正转:当A相上身沿时,B相低电平,表格中对应的是递增计数。当A相下降沿时,B相高电平,表格中对应的是递增计数。即编码器正转对应的计数方向是递增计数。
反转:当A相上身沿时,B相高电平,表格中对应的是递减计数。当A相下降沿时,B相低电平,表格中对应的是递减计数。即编码器反转对应的计数方向是递减计数。
编码器模式2:仅在TI2处计数--计数器根据TI2FP2电平在TI1FP1边沿递增/递减计数。
假设把A相接在CH1(TI1),B相接在CH2(TI2),选择仅在TI2处计数(仅检测B相边沿)。脉冲信号会有两种,当编码器正转时A相在前、当编码器反转时B相在前。
正转:当B相上身沿时,A相高电平,表格中对应的是递增计数。当B相下降沿时,A相低电平,表格中对应的是递增计数。即编码器正转对应的计数方向是递增计数。
反转:当B相上身沿时,A相低电平,表格中对应的是递减计数。当B相下降沿时,A相高电平,表格中对应的是递减计数。即编码器反转对应的计数方向是递减计数。
编码器模式3:在TI1和TI2处均计数--计数器根据TI1FP1和TI2FP2的边沿计数,计数的方向取决于另外一个信号的电平。
假设把A相接在CH1(TI1),B相接在CH2(TI2),选择仅在TI2处计数(仅检测B相边沿)。脉冲信号会有两种,当编码器正转时A相在前、当编码器反转时B相在前。
正转:当A相上身沿时,B相低电平,表格中对应的是递增计数。当B相上身沿时,A相高电平,表格中对应的是递增计数。当A相下降沿时,B相高电平,表格中对应的是递增计数。当B相下降沿时,A相低电平,表格中对应的是递增计数。即编码器正转对应的计数方向是递增计数。
反转:当B相上身沿时,A相低电平,表格中对应的是递减计数。当A相上身沿时,B相高电平,表格中对应的是递减计数。当B相下降沿时,A相高电平,表格中对应的是递减计数。当A相下降沿时,B相低电平,表格中对应的是递减计数。即编码器反转对应的计数方向是递减计数。
计数溢出处理:
编码器在电机运行时会一直旋转并输出脉冲信号,如果时间较长,那么定时器计数就会溢出,我们必须对溢出进行处理,否则电机速度的计算结果就不准了。
当前总计数值 = 计数器当前值 + 溢出次数(可在溢出中断中记录) * 65536。
溢出时读取TIMx控制寄存器1(TIMx_CR1)的位4(DIR,计数方向),以计算总的计数次数变化量。
0:计数器递增计数
1:计数器递减计数
作用:在计数溢出时,读取到溢出方向,后续才能计算总的计数变化量。
相关寄存器:
TIMx_CR1:CEN为计数器使能。
TIMx_CR1:DIR为计数方向。
TIMx_CCMR1(TIMx_CCMR1对应通道1、2,TIMx_CCMR2对应通道3、4):CC1S选择IC1映射再TI1上。
TIMx_CCMR1(TIMx_CCMR1对应通道1、2,TIMx_CCMR2对应通道3、4):IC1PSC选择00。一次边沿就触发一次计数。
TIMx_CCMR1(TIMx_CCMR1对应通道1、2,TIMx_CCMR2对应通道3、4):IC1F用来设置TI1输入采样频率和数据滤波器长度。其中,Fck_int是定时器时钟源频率,按照例程为84MHz,而Fdts是根据TIMx_CR1:CKD来确定的。如果TIMx_CR1:CKD设置为00,则Fdts = Fck_int。N值为采样次数。举例:假设IC1F为0011,并设置IC1映射到TI1上,则表示以Fck_int为采样频率,当连续8次都是采样到TI1为高电平或低电平,滤波器才输出一个有效输出边沿。当8次采样中有高有低,则保持原来的输出,这样就可以滤除高频干扰信号,从而达到滤波的效果。
TIMx_CCER控制各输入输出通道的开关和极性。要使能编码器接口模式,必须设置CC1E和CC22为1,而CC1P和CC2P设置的是边沿触发的方向。
TIMx_SMCR:SMS用于从模式选择,其实就是选择计数器输入时钟的来源。
初始化工作
/********************************* 1 通用定时器 编码器程序 *************************************/
TIM_HandleTypeDef g_timx_encode_chy_handle; /* 定时器x句柄 */
TIM_Encoder_InitTypeDef g_timx_encoder_chy_handle; /* 定时器编码器句柄 */
/**
* @brief 通用定时器TIMX 通道Y 编码器接口模式 初始化函数
* @note
* 通用定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候
* 通用定时器的时钟为APB1时钟的2倍, 而APB1为42M, 所以定时器时钟 = 84Mhz
* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.
* Ft=定时器工作频率,单位:Mhz
*
* @param arr: 自动重装值。
* @param psc: 时钟预分频数
* @retval 无
*/
void gtim_timx_encoder_chy_init(uint16_t arr, uint16_t psc)
{
/* 定时器x配置 */
g_timx_encode_chy_handle.Instance = GTIM_TIMX_ENCODER; /* 定时器x */
g_timx_encode_chy_handle.Init.Prescaler = psc; /* 定时器分频 */
g_timx_encode_chy_handle.Init.Period = arr; /* 自动重装载值 */
g_timx_encode_chy_handle.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; /* 时钟分频因子 */
/* 定时器x编码器配置 */
g_timx_encoder_chy_handle.EncoderMode = TIM_ENCODERMODE_TI12; /* TI1、TI2都检测,4倍频 */
g_timx_encoder_chy_handle.IC1Polarity = TIM_ICPOLARITY_RISING; /* 输入极性,非反向 */
g_timx_encoder_chy_handle.IC1Selection = TIM_ICSELECTION_DIRECTTI; /* 输入通道选择 */
g_timx_encoder_chy_handle.IC1Prescaler = TIM_ICPSC_DIV1; /* 不分频 */
g_timx_encoder_chy_handle.IC1Filter = 10; /* 滤波器设置 */
g_timx_encoder_chy_handle.IC2Polarity = TIM_ICPOLARITY_RISING; /* 输入极性,非反向 */
g_timx_encoder_chy_handle.IC2Selection = TIM_ICSELECTION_DIRECTTI; /* 输入通道选择 */
g_timx_encoder_chy_handle.IC2Prescaler = TIM_ICPSC_DIV1; /* 不分频 */
g_timx_encoder_chy_handle.IC2Filter = 10; /* 滤波器设置 */
HAL_TIM_Encoder_Init(&g_timx_encode_chy_handle, &g_timx_encoder_chy_handle);/* 初始化定时器x编码器 */
HAL_TIM_Encoder_Start(&g_timx_encode_chy_handle,GTIM_TIMX_ENCODER_CH1); /* 使能编码器通道1 */
HAL_TIM_Encoder_Start(&g_timx_encode_chy_handle,GTIM_TIMX_ENCODER_CH2); /* 使能编码器通道2 */
__HAL_TIM_ENABLE_IT(&g_timx_encode_chy_handle,TIM_IT_UPDATE); /* 使能更新中断 */
__HAL_TIM_CLEAR_FLAG(&g_timx_encode_chy_handle,TIM_IT_UPDATE); /* 清除更新中断标志位 */
}
/******************************** 2 基本定时器 编码器程序 ************************************/
TIM_HandleTypeDef timx_handler; /* 定时器参数句柄 */
/**
* @brief 基本定时器TIMX定时中断初始化函数
* @note
* 基本定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候
* 基本定时器的时钟为APB1时钟的2倍, 而APB1为42M, 所以定时器时钟 = 84Mhz
* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.
* Ft=定时器工作频率,单位:Mhz
*
* @param arr: 自动重装值。
* @param psc: 时钟预分频数
* @retval 无
*/
void btim_timx_int_init(uint16_t arr, uint16_t psc)
{
timx_handler.Instance = BTIM_TIMX_INT; /* 基本定时器X */
timx_handler.Init.Prescaler = psc; /* 设置预分频器 */
timx_handler.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数器 */
timx_handler.Init.Period = arr; /* 自动装载值 */
timx_handler.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; /* 时钟分频因子 */
HAL_TIM_Base_Init(&timx_handler);
HAL_TIM_Base_Start_IT(&timx_handler); /* 使能基本定时器x和及其更新中断:TIM_IT_UPDATE */
__HAL_TIM_CLEAR_IT(&timx_handler,TIM_IT_UPDATE); /* 清除更新中断标志位 */
}gtim_timx_encoder_chy_init(0XFFFF, 0); /* 编码器定时器初始化,不分频直接84M的计数频率 */
btim_timx_int_init(1000 - 1 , 84 - 1); /* 基本定时器初始化,1ms计数周期 */初始化主要分为三部分:
1、HAL_TIM_Encoder_Init函数初始化编码器参数,内部会调用HAL_TIM_Encoder_MspInit函数完成引脚配置并开启中断。
2、HAL_TIM_Encoder_Start函数使能编码器通道。
3、__HAL_TIM_ENABLE_IT函数带进参数TIM_IT_UPDATE使能更新中断。
4、__HAL_TIM_CLEAR_FLAG函数带进参数TIM_IT_UPDATE清除更新中断标志位。
5、HAL_TIM_Base_Init函数初始化基本定时器,内部会调用HAL_TIM_Base_MspInit函数完成引脚配置并开启中断。
6、HAL_TIM_Base_Start_IT函数使能基本定时器中断。
7、__HAL_TIM_CLEAR_IT函数带进参数TIM_IT_UPDATE清除更新中断标志位。
编码器测速工作
在定时器中断中进行这样的处理:
volatile int g_timx_encode_count = 0; /* 溢出次数 */
/**
* @brief 获取编码器的值
* @param 无
* @retval 编码器值
*/
int gtim_get_encode(void)
{
return ( int32_t )__HAL_TIM_GET_COUNTER(&g_timx_encode_chy_handle) + g_timx_encode_count * 65536; /* 当前计数值+之前累计编码器的值=总的编码器值 */
}
/**
* @brief 定时器更新中断回调函数
* @param htim:定时器句柄指针
* @note 此函数会被定时器中断函数共同调用的
* @retval 无
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM3)
{
if(__HAL_TIM_IS_TIM_COUNTING_DOWN(&g_timx_encode_chy_handle)) /* 判断CR1的DIR位 */
{
g_timx_encode_count--; /* DIR位为1,也就是递减计数 */
}
else
{
g_timx_encode_count++; /* DIR位为0,也就是递增计数 */
}
}
else if (htim->Instance == TIM6)
{
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 50); /* 中位平均值滤除编码器抖动数据,50ms计算一次速度*/
}
}在TIM3编码器模式下经过65536次计数后进入中断,中断中记录是此时是递减计数进入还是递增计数进入。(从0开始,递减的话一开始就会进入中断了,计数器变为65536开始递减)
在TIM6中1ms进入一次中断,中断记录编码器值(相当于总的计数值),然后进行电机速度计算(用到冒泡排序和一阶低通滤波算法)后传值给g_motor_data.speed,单位转/分(RPM)。
/************************************* 第三部分 编码器测速 ****************************************************/
#define ROTO_RATIO 44 /* 线数*倍频系数,即11*4=44 */
#define REDUCTION_RATIO 30 /* 减速比30:1 */
/* 电机参数结构体 */
typedef struct
{
uint8_t state; /*电机状态*/
float current; /*电机电流*/
float volatage; /*电机电压*/
float power; /*电机功率*/
float speed; /*电机实际速度*/
int32_t motor_pwm; /*设置比较值大小 */
} Motor_TypeDef;
Motor_TypeDef g_motor_data; /*电机参数变量*/
ENCODE_TypeDef g_encode; /*编码器参数变量*/
/**
* @brief 电机速度计算
* @param encode_now:当前编码器总的计数值
* ms:计算速度的间隔,中断1ms进入一次,例如ms = 5即5ms计算一次速度
* @retval 无
*/
void speed_computer(int32_t encode_now, uint8_t ms)
{
uint8_t i = 0, j = 0;
float temp = 0.0;
static uint8_t sp_count = 0, k = 0;
static float speed_arr[10] = {0.0}; /* 存储速度进行滤波运算 */
if (sp_count == ms) /* 计算一次速度 */
{
/* 计算电机转速
第一步 :计算ms毫秒内计数变化量
第二步 ;计算1min内计数变化量:g_encode.speed * ((1000 / ms) * 60 ,
第三步 :除以编码器旋转一圈的计数次数(倍频倍数 * 编码器分辨率)
第四步 :除以减速比即可得出电机转速
*/
g_encode.encode_now = encode_now; /* 取出编码器当前计数值 */
g_encode.speed = (g_encode.encode_now - g_encode.encode_old); /* 计算编码器计数值的变化量 */
speed_arr[k++] = (float)(g_encode.speed * ((1000 / ms) * 60.0) / REDUCTION_RATIO / ROTO_RATIO ); /* 保存电机转速 */
g_encode.encode_old = g_encode.encode_now; /* 保存当前编码器的值 */
/* 累计10次速度值,后续进行滤波*/
if (k == 10)
{
for (i = 10; i >= 1; i--) /* 冒泡排序*/
{
for (j = 0; j < (i - 1); j++)
{
if (speed_arr[j] > speed_arr[j + 1]) /* 数值比较 */
{
temp = speed_arr[j]; /* 数值换位 */
speed_arr[j] = speed_arr[j + 1];
speed_arr[j + 1] = temp;
}
}
}
temp = 0.0;
for (i = 2; i < 8; i++) /* 去除两边高低数据 */
{
temp += speed_arr[i]; /* 将中间数值累加 */
}
temp = (float)(temp / 6); /*求速度平均值*/
/* 一阶低通滤波
* 公式为:Y(n)= qX(n) + (1-q)Y(n-1)
* 其中X(n)为本次采样值;Y(n-1)为上次滤波输出值;Y(n)为本次滤波输出值,q为滤波系数
* q值越小则上一次输出对本次输出影响越大,整体曲线越平稳,但是对于速度变化的响应也会越慢
*/
g_motor_data.speed = (float)( ((float)0.48 * temp) + (g_motor_data.speed * (float)0.52) );
k = 0;
}
sp_count = 0;
}
sp_count ++;
}速度环控制实现

PID相关函数
#if INCR_LOCT_SELECT
/* 增量式PID参数相关宏 */
#define KP 8.50f /* P参数*/
#define KI 5.00f /* I参数*/
#define KD 0.10f /* D参数*/
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms*/
#else
/* 位置式PID参数相关宏 */
#define KP 10.0f /* P参数*/
#define KI 6.00f /* I参数*/
#define KD 0.5f /* D参数*/
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms*/
#endif
/* PID参数结构体 */
typedef struct
{
__IO float SetPoint; /* 设定目标 */
__IO float ActualValue; /* 期望输出值 */
__IO float SumError; /* 误差累计 */
__IO float Proportion; /* 比例常数 P */
__IO float Integral; /* 积分常数 I */
__IO float Derivative; /* 微分常数 D */
__IO float Error; /* Error[1] */
__IO float LastError; /* Error[-1] */
__IO float PrevError; /* Error[-2] */
} PID_TypeDef;
PID_TypeDef g_speed_pid; /* 速度环PID参数结构体 */
/**
* @brief pid初始化
* @param 无
* @retval 无
*/
void pid_init(void)
{
g_speed_pid.SetPoint = 0; /* 设定目标值 */
g_speed_pid.ActualValue = 0.0; /* 期望输出值 */
g_speed_pid.SumError = 0.0; /* 积分值 */
g_speed_pid.Error = 0.0; /* Error[1] */
g_speed_pid.LastError = 0.0; /* Error[-1] */
g_speed_pid.PrevError = 0.0; /* Error[-2] */
g_speed_pid.Proportion = KP; /* 比例常数 Proportional Const */
g_speed_pid.Integral = KI; /* 积分常数 Integral Const */
g_speed_pid.Derivative = KD; /* 微分常数 Derivative Const */
}
/**
* @brief pid闭环控制
* @param *PID:PID结构体变量地址
* @param Feedback_value:当前实际值
* @retval 期望输出值
*/
int32_t increment_pid_ctrl(PID_TypeDef *PID, float Feedback_value)
{
PID->Error = (float)(PID->SetPoint - Feedback_value); /* 计算偏差 */
#if INCR_LOCT_SELECT /* 增量式PID */
PID->ActualValue += (PID->Proportion * (PID->Error - PID->LastError)) /* 比例环节 */
+ (PID->Integral * PID->Error) /* 积分环节 */
+ (PID->Derivative * (PID->Error - 2 * PID->LastError + PID->PrevError)); /* 微分环节 */
PID->PrevError = PID->LastError; /* 存储偏差,用于下次计算 */
PID->LastError = PID->Error;
#else /* 位置式PID */
PID->SumError += PID->Error;
PID->ActualValue = (PID->Proportion * PID->Error) /* 比例环节 */
+ (PID->Integral * PID->SumError) /* 积分环节 */
+ (PID->Derivative * (PID->Error - PID->LastError)); /* 微分环节 */
PID->LastError = PID->Error;
#endif
return ((int32_t)(PID->ActualValue)); /* 返回计算后输出的数值 */
}PID运算
主要体现在TIM6定时中断中用来编码器测速时。
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 5); /* 中位平均值滤除编码器抖动数据,5ms计算一次速度*/
if (val % SMAPLSE_PID_SPEED == 0) /* 50ms进行一次pid计算 */
{
if (g_run_flag) /* 判断电机是否启动了*/
{
/* PID计算,输出比较值(占空比) */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_speed_pid, g_motor_data.speed);
if (g_motor_data.motor_pwm >= 8200) /* 限速 */
{
g_motor_data.motor_pwm = 8200;
}
else if (g_motor_data.motor_pwm <= -8200)
{
g_motor_data.motor_pwm = -8200;
}
motor_pwm_set(g_motor_data.motor_pwm); /* 设置电机转速 */
}
val = 0;
}
val ++;电流环控制实现

PID相关函数
#define INCR_LOCT_SELECT 0 /* 0:位置式,1:增量式 */
#if INCR_LOCT_SELECT
/* 增量式PID参数相关宏 */
#define KP 0.0f /* P参数*/
#define KI 6.0f /* I参数*/
#define KD 4.0f /* D参数*/
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms*/
#else
/* 位置式PID参数相关宏 */
#define KP 10.0f /* P参数*/
#define KI 7.0f /* I参数*/
#define KD 2.0f /* D参数*/
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms*/
#endif
/* PID参数结构体 */
typedef struct
{
__IO float SetPoint; /* 设定目标 */
__IO float ActualValue; /* 期望输出值 */
__IO float SumError; /* 误差累计 */
__IO float Proportion; /* 比例常数 P */
__IO float Integral; /* 积分常数 I */
__IO float Derivative; /* 微分常数 D */
__IO float Error; /* Error[1] */
__IO float LastError; /* Error[-1] */
__IO float PrevError; /* Error[-2] */
} PID_TypeDef;
PID_TypeDef g_current_pid; /* 电流环PID参数结构体 */
/**
* @brief pid初始化
* @param 无
* @retval 无
*/
void pid_init(void)
{
g_current_pid.SetPoint = 40; /* 设定目标值 */
g_current_pid.ActualValue = 0.0; /* 期望输出值 */
g_current_pid.SumError = 0.0; /* 积分值 */
g_current_pid.Error = 0.0; /* Error[1] */
g_current_pid.LastError = 0.0; /* Error[-1] */
g_current_pid.PrevError = 0.0; /* Error[-2] */
g_current_pid.Proportion = KP; /* 比例常数 Proportional Const */
g_current_pid.Integral = KI; /* 积分常数 Integral Const */
g_current_pid.Derivative = KD; /* 微分常数 Derivative Const */
}PID运算
ADC中相对于电压、电流、温度检测实验,ADC转换完成中断回调函数处理增加了处理内容。
旧机制是求ADC通道的平均值g_adc_val[2]。
新机制:
1、求ADC通道的平均值g_adc_val[2]。
2、然后累加16次g_adc_val[2]后平均到add_adc。这个步骤不断重复,充当当前ADC值。
3、然后继续累加17次add_adc后平均到init_adc_value。这个步骤只可以满足一次,然后充当初始ADC值。
4、根据电流I = (当前ADC值 - 初始ADC值) * (3.3 / 4096 / 0.12 / 1000),即可求得temp_c,单位mA。
5、根据一阶低通滤波 (float)((g_motor_data.current * (float)0.60) + ((float)0.40 * temp_c))求得g_motor_data.current。
6、如果g_motor_data.current小于20mA,则过滤掉这微弱浮动电流。
uint16_t g_adc_val[ADC_CH_NUM]; /*ADC平均值存放数组*/
/**
* @brief ADC采集中断回调函数
* @param 无
* @retval 无
*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
float temp_c = 0.0;
static float add_adc = 0;
static float init_adc_value = 0;
static uint8_t adc_count1 = 0, adc_count2 = 0;
if ( hadc->Instance == ADC_ADCX ) /* 判断是不是ADC1 */
{
adc_count1++;
HAL_ADC_Stop_DMA(&g_adc_nch_dma_handle); /* 关闭DMA转换 */
calc_adc_val(g_adc_val); /* 计算ADC的平均值 */
add_adc += g_adc_val[2]; /* 取出电流通道对应的ADC值进行累计 */
if (adc_count1 >= 15) /* 累计15次 */
{
add_adc = (float)(add_adc / adc_count1); /* 取平均值 */
if (adc_count2 <= 16) /* 采集16次ADC平均值计算参考电压的ADC值 */
{
adc_count2++;
init_adc_value += add_adc; /* 对平均值累计求和 */
if (adc_count2 == 16) /* 平均值累计16次 */
{
adc_count2 = 17; /* 不再进入 */
init_adc_value = (init_adc_value / 16.0f); /* 存储初始ADC值 */
}
}
if (adc_count2 >= 17) /* 采集完参考ADC值后,采集电流通道当前ADC值 */
{
temp_c = (add_adc - init_adc_value) * ADC2CURT; /* 计算电流 */
g_motor_data.current = (float)((g_motor_data.current * (float)0.60) + ((float)0.40 * temp_c)); /* 一阶低通滤波 */
if (g_motor_data.current <= 20) /* 过滤掉微弱浮动电流 */
{
g_motor_data.current = 0.0;
}
}
add_adc = 0;
adc_count1 = 0;
}
HAL_ADC_Start_DMA(&g_adc_nch_dma_handle, (uint32_t *)&g_adc_value, (uint32_t)(ADC_SUM)); /* 启动DMA转换 */
}
}然后进行电流的PID运算。
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 5); /* 中位平均值滤除编码器抖动数据,5ms计算一次速度 */
if (val % SMAPLSE_PID_SPEED == 0) /* 进行一次pid计算 */
{
if (g_run_flag) /* 判断电机是否启动了 */
{
/* PID计算,输出比较值(占空比),再进行一阶低通滤波 */
motor_pwm_temp = increment_pid_ctrl(&g_current_pid, g_motor_data.current);
g_motor_data.motor_pwm = (int32_t)((g_motor_data.motor_pwm * 0.5) + (motor_pwm_temp * 0.5));
if (g_motor_data.motor_pwm >= 8200) /* 限制占空比 */
{
g_motor_data.motor_pwm = 8200;
}
else if (g_motor_data.motor_pwm <= 0)
{
g_motor_data.motor_pwm = 0;
}
motor_pwm_set(g_motor_data.motor_pwm); /* 设置占空比(电机转速) */
}
val = 0;
}
val ++;位置环控制实现

PID相关函数
/* 增量式PID参数相关宏 */
#define KP 15.0f /* P参数*/
#define KI 0.00f /* I参数*/
#define KD 7.50f /* D参数*/
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms */
/* PID参数结构体 */
typedef struct
{
__IO float SetPoint; /* 设定目标 */
__IO float ActualValue; /* 期望输出值 */
__IO float SumError; /* 误差累计 */
__IO float Proportion; /* 比例常数 P */
__IO float Integral; /* 积分常数 I */
__IO float Derivative; /* 微分常数 D */
__IO float Error; /* Error[1] */
__IO float LastError; /* Error[-1] */
__IO float PrevError; /* Error[-2] */
} PID_TypeDef;
PID_TypeDef g_location_pid; /*位置环PID参数结构体*/
/**
* @brief pid初始化
* @param 无
* @retval 无
*/
void pid_init(void)
{
g_location_pid.SetPoint = 0.0; /* 设定目标值 */
g_location_pid.ActualValue = 0.0; /* 期望输出值 */
g_location_pid.SumError = 0.0; /* 积分值 */
g_location_pid.Error = 0.0; /* Error[1] */
g_location_pid.LastError = 0.0; /* Error[-1] */
g_location_pid.PrevError = 0.0; /* Error[-2] */
g_location_pid.Proportion = KP; /* 比例常数 Proportional Const */
g_location_pid.Integral = KI; /* 积分常数 Integral Const */
g_location_pid.Derivative = KD; /* 微分常数 Derivative Const */
}PID运算
ADC部分继续沿用电流环的采集方法。
使用g_motor_data.location存储编码器计数值,然后进行PID运算。
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 5); /* 中位平均值滤除编码器抖动数据,5ms计算一次速度 */
g_motor_data.location = Encode_now; /* 获取当前计数总值,用于位置闭环控制 */
if (val % SMAPLSE_PID_SPEED == 0) /* 进行一次pid计算 */
{
if (g_run_flag) /* 判断电机是否启动了 */
{
/* PID计算,输出比较值(占空比),再进行一阶低通滤波 */
motor_pwm_temp = increment_pid_ctrl(&g_location_pid, g_motor_data.location);
g_motor_data.motor_pwm = (int32_t)((g_motor_data.motor_pwm * 0.5) + (motor_pwm_temp * 0.5));
if (g_motor_data.motor_pwm >= 4200) /* 限制占空比 */
{
g_motor_data.motor_pwm = 4200;
}
else if (g_motor_data.motor_pwm <= -4200)
{
g_motor_data.motor_pwm = -4200;
}
motor_pwm_set(g_motor_data.motor_pwm); /* 设置占空比(电机转速)*/
}
val = 0;
}
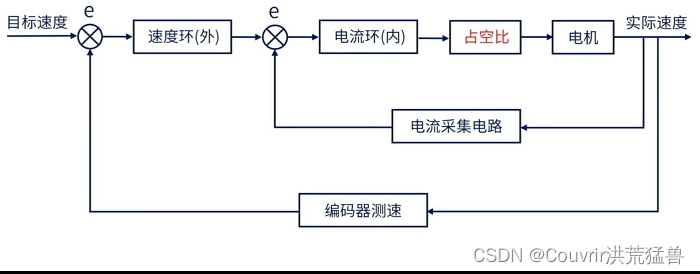
val ++;速度+位置双环控制实现
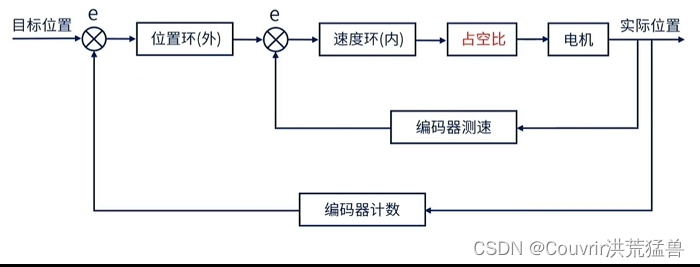
双环控制中,外环控制的是优先考虑对象,内环用于对控制效果进行优化。
Tips:双环控制时,外环PID参数调节幅度不能太大,这对于整个曲线的影响很大。
PID相关函数
/* 定义位置环(外环)PID参数相关宏 */
#define L_KP 0.18f /* P参数 */
#define L_KI 0.00f /* I参数 */
#define L_KD 0.08f /* D参数 */
/* 定义速度环(内环)PID参数相关宏 */
#define S_KP 20.0f /* P参数 */
#define S_KI 10.00f /* I参数 */
#define S_KD 0.02f /* D参数 */
PID_TypeDef g_location_pid; /* 位置环PID参数结构体 */
PID_TypeDef g_speed_pid; /* 速度环PID参数结构体 */
/**
* @brief pid初始化
* @param 无
* @retval 无
*/
void pid_init(void)
{
/* 初始化位置环PID参数 */
g_location_pid.SetPoint = 0.0; /* 目标值 */
g_location_pid.ActualValue = 0.0; /* 期望输出值 */
g_location_pid.SumError = 0.0; /* 积分值 */
g_location_pid.Error = 0.0; /* Error[1] */
g_location_pid.LastError = 0.0; /* Error[-1] */
g_location_pid.PrevError = 0.0; /* Error[-2] */
g_location_pid.Proportion = L_KP; /* 比例常数 Proportional Const */
g_location_pid.Integral = L_KI; /* 积分常数 Integral Const */
g_location_pid.Derivative = L_KD; /* 微分常数 Derivative Const */
/* 初始化速度环PID参数 */
g_speed_pid.SetPoint = 0.0; /* 目标值 */
g_speed_pid.ActualValue = 0.0; /* 期望输出值 */
g_speed_pid.SumError = 0.0; /* 积分值 */
g_speed_pid.Error = 0.0; /* Error[1] */
g_speed_pid.LastError = 0.0; /* Error[-1] */
g_speed_pid.PrevError = 0.0; /* Error[-2] */
g_speed_pid.Proportion = S_KP; /* 比例常数 Proportional Const */
g_speed_pid.Integral = S_KI; /* 积分常数 Integral Const */
g_speed_pid.Derivative = S_KD; /* 微分常数 Derivative Const */
}PID运算
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 5); /* 中位平均值滤除编码器抖动数据,5ms计算一次速度 */
if (val % SMAPLSE_PID_SPEED == 0) /* 进行一次pid计算 */
{
if (g_run_flag) /* 判断电机是否启动了 */
{
g_motor_data.location = (float)Encode_now; /* 获取当前编码器总计数值,用于位置闭环控制 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_location_pid, g_motor_data.location); /* 位置环PID控制(外环) */
if (g_motor_data.motor_pwm >= 150) /* 限制外环输出(目标速度) */
{
g_motor_data.motor_pwm = 150;
}
else if (g_motor_data.motor_pwm <= -150)
{
g_motor_data.motor_pwm = -150;
}
g_speed_pid.SetPoint = g_motor_data.motor_pwm; /* 设置目标速度,外环输出作为内环输入 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_speed_pid, g_motor_data.speed); /* 速度环PID控制(内环) */
if (g_motor_data.motor_pwm >= 8200) /* 限制占空比 */
{
g_motor_data.motor_pwm = 8200;
}
else if (g_motor_data.motor_pwm <= -8200)
{
g_motor_data.motor_pwm = -8200;
}
motor_pwm_set(g_motor_data.motor_pwm); /* 设置占空比(电机转速) */
}
val = 0;
}
val ++;电流+位置双环控制实现
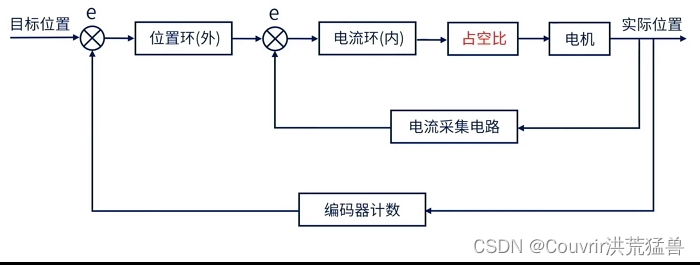
双环控制中,外环控制的是优先考虑对象,内环用于对控制效果进行优化。
Tips:双环控制时,外环PID参数调节幅度不能太大,这对于整个曲线的影响很大。
PID相关函数
#define INCR_LOCT_SELECT 0 /* 0:位置式,1:增量式 */
/* 注意:双环控制的时候,外环PID参数调节幅度不要太大,这对于整个曲线的影响很大 */
#if INCR_LOCT_SELECT
/* 定义位置环PID参数相关宏 */
#define L_KP 0.18f /* P参数 */
#define L_KI 0.00f /* I参数 */
#define L_KD 0.08f /* D参数 */
/* 定义电流环PID参数相关宏 */
#define C_KP 10.00f /* P参数 */
#define C_KI 9.00f /* I参数 */
#define C_KD 0.00f /* D参数 */
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms */
#else
/* 定义位置环PID参数相关宏 */
#define L_KP 0.18f /* P参数 */
#define L_KI 0.00f /* I参数 */
#define L_KD 0.08f /* D参数 */
/* 定义电流环PID参数相关宏 */
#define C_KP 10.00f /* P参数 */
#define C_KI 7.00f /* I参数 */
#define C_KD 0.00f /* D参数 */
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms */
#endif
PID_TypeDef g_location_pid; /* 位置环PID参数结构体 */
PID_TypeDef g_current_pid; /* 电流环PID参数结构体 */
/**
* @brief pid初始化
* @param 无
* @retval 无
*/
void pid_init(void)
{
/* 初始化位置环PID参数 */
g_location_pid.SetPoint = 0.0; /* 目标值 */
g_location_pid.ActualValue = 0.0; /* 期望输出值 */
g_location_pid.SumError = 0.0; /* 积分值 */
g_location_pid.Error = 0.0; /* Error[1] */
g_location_pid.LastError = 0.0; /* Error[-1] */
g_location_pid.PrevError = 0.0; /* Error[-2] */
g_location_pid.Proportion = L_KP; /* 比例常数 Proportional Const */
g_location_pid.Integral = L_KI; /* 积分常数 Integral Const */
g_location_pid.Derivative = L_KD; /* 微分常数 Derivative Const */
/* 初始化电流环PID参数 */
g_current_pid.SetPoint = 0.0; /* 目标值 */
g_current_pid.ActualValue = 0.0; /* 期望输出值 */
g_current_pid.SumError = 0.0; /* 积分值*/
g_current_pid.Error = 0.0; /* Error[1]*/
g_current_pid.LastError = 0.0; /* Error[-1]*/
g_current_pid.PrevError = 0.0; /* Error[-2]*/
g_current_pid.Proportion = C_KP; /* 比例常数 Proportional Const */
g_current_pid.Integral = C_KI; /* 积分常数 Integral Const */
g_current_pid.Derivative = C_KD; /* 微分常数 Derivative Const */
}PID运算
电流在内环,不能有负数。需对传入的位置环做处理。
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 5); /* 中位平均值滤除编码器抖动数据,5ms计算一次速度 */
if (val % SMAPLSE_PID_SPEED == 0) /* 进行一次pid计算 */
{
if (g_run_flag) /* 判断电机是否启动了 */
{
g_motor_data.location = (float)Encode_now; /* 获取当前编码器总计数值,用于位置闭环控制 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_location_pid, g_motor_data.location); /* 位置环PID控制(外环) */
if ( g_motor_data.motor_pwm > 0) /* 判断位置环输出值是否为正数 */
{
dcmotor_dir(0); /* 输出为正数,设置电机正转 */
}
else
{
g_motor_data.motor_pwm = -g_motor_data.motor_pwm; /* 输出为负数,取反 */
dcmotor_dir(1); /* 设置电机反转 */
}
if (g_motor_data.motor_pwm >= 120) /* 限制外环输出(目标电流) */
{
g_motor_data.motor_pwm = 120;
}
g_current_pid.SetPoint = g_motor_data.motor_pwm; /* 设置目标电流,外环输出作为内环输入 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_current_pid, g_motor_data.current); /* 电流环PID控制(内环) */
if (g_motor_data.motor_pwm >= 8200) /* 限制占空比 */
{
g_motor_data.motor_pwm = 8200;
}
else if (g_motor_data.motor_pwm <= 0)
{
g_motor_data.motor_pwm = 0;
}
dcmotor_speed(g_motor_data.motor_pwm); /* 设置占空比 */
}
val = 0;
}
val ++;电流+速度双环控制实现

双环控制中,外环控制的是优先考虑对象,内环用于对控制效果进行优化。
Tips:双环控制时,外环PID参数调节幅度不能太大,这对于整个曲线的影响很大。
PID相关函数
#define INCR_LOCT_SELECT 0 /* 0:位置式,1:增量式 */
/* 注意:双环控制的时候,外环PID参数调节幅度不要太大,这对于整个曲线的影响很大 */
#if INCR_LOCT_SELECT
/* 定义速度环(外环)PID参数相关宏 */
#define S_KP 1.500f /* P参数 */
#define S_KI 0.023f /* I参数 */
#define S_KD 0.010f /* D参数 */
/* 定义电流环(内环)PID参数相关宏 */
#define C_KP 1.00f /* P参数 */
#define C_KI 3.00f /* I参数 */
#define C_KD 0.00f /* D参数 */
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms */
#else
/*定义速度环(外环)PID参数相关宏*/
#define S_KP 1.500f /* P参数 */
#define S_KI 0.023f /* I参数 */
#define S_KD 0.002f /* D参数 */
/* 定义电流环(内环)PID参数相关宏 */
#define C_KP 1.00f /* P参数 */
#define C_KI 3.75f /* I参数 */
#define C_KD 0.00f /* D参数 */
#define SMAPLSE_PID_SPEED 50 /* 采样周期 单位ms */
#endif
PID_TypeDef g_speed_pid; /* 速度环PID参数结构体 */
PID_TypeDef g_current_pid; /* 电流环PID参数结构体 */
/**
* @brief pid初始化
* @param 无
* @retval 无
*/
void pid_init(void)
{
/* 初始化速度环PID参数 */
g_speed_pid.SetPoint = 0; /* 目标值 */
g_speed_pid.ActualValue = 0.0; /* 期望输出值 */
g_speed_pid.SumError = 0.0; /* 积分值 */
g_speed_pid.Error = 0.0; /* Error[1] */
g_speed_pid.LastError = 0.0; /* Error[-1] */
g_speed_pid.PrevError = 0.0; /* Error[-2] */
g_speed_pid.Proportion = S_KP; /* 比例常数 Proportional Const */
g_speed_pid.Integral = S_KI; /* 积分常数 Integral Const */
g_speed_pid.Derivative = S_KD; /* 微分常数 Derivative Const */
/* 初始化电流环PID参数 */
g_current_pid.SetPoint = 0.0; /* 目标值 */
g_current_pid.ActualValue = 0.0; /* 期望输出值 */
g_current_pid.SumError = 0.0; /* 积分值*/
g_current_pid.Error = 0.0; /* Error[1]*/
g_current_pid.LastError = 0.0; /* Error[-1]*/
g_current_pid.PrevError = 0.0; /* Error[-2]*/
g_current_pid.Proportion = C_KP; /* 比例常数 Proportional Const */
g_current_pid.Integral = C_KI; /* 积分常数 Integral Const */
g_current_pid.Derivative = C_KD; /* 微分常数 Derivative Const */
}PID运算
电流在内环,不能有负数。需对传入的速度环做处理。
还增加了积分限幅处理,即给定可接受的偏差累计值最大值和最小值。
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 5); /* 中位平均值滤除编码器抖动数据,5ms计算一次速度 */
if (val % SMAPLSE_PID_SPEED == 0) /* 进行一次pid计算 */
{
if (g_run_flag) /* 判断电机是否启动了 */
{
integral_limit( &g_speed_pid , 7000 , -7000 ); /* 速度环积分限幅 */
integral_limit( &g_current_pid , 2500 , -2500 ); /* 电流环积分限幅 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_speed_pid, g_motor_data.speed); /* 速度环PID控制(外环) */
if ( g_motor_data.motor_pwm > 0) /* 判断速度环输出值是否为正数 */
{
dcmotor_dir(0); /* 输出为正数,设置电机正转 */
}
else
{
g_motor_data.motor_pwm = -g_motor_data.motor_pwm; /* 目标电流不能为负数,速度环输出要取反 */
dcmotor_dir(1); /* 设置电机反转 */
}
if (g_motor_data.motor_pwm >= 200) /* 限制外环输出(目标电流) */
{
g_motor_data.motor_pwm = 200;
}
g_current_pid.SetPoint = g_motor_data.motor_pwm; /* 设置目标电流,外环输出作为内环输入 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_current_pid, g_motor_data.current); /* 电流环PID控制(内环) */
if (g_motor_data.motor_pwm >= 8200) /* 限制占空比 */
{
g_motor_data.motor_pwm = 8200;
}
else if (g_motor_data.motor_pwm <= 0) /* 滤掉无效输出 */
{
g_motor_data.motor_pwm = 0;
}
dcmotor_speed(g_motor_data.motor_pwm); /* 设置占空比 */
}
val = 0;
}
val ++;电流+速度+位置三环控制实现

PID相关函数
/* 定义位置环PID参数相关宏 */
#define L_KP 0.06f /* P参数 */
#define L_KI 0.00f /* I参数 */
#define L_KD 0.01f /* D参数 */
/* 定义速度环PID参数相关宏 */
#define S_KP 5.00f /* P参数 */
#define S_KI 0.30f /* I参数 */
#define S_KD 0.01f /* D参数 */
/* 定义电流环PID参数相关宏 */
#define C_KP 8.00f /* P参数 */
#define C_KI 4.00f /* I参数 */
#define C_KD 1.00f /* D参数 */
PID_TypeDef g_location_pid; /* 位置环PID参数结构体 */
PID_TypeDef g_speed_pid; /* 速度环PID参数结构体 */
PID_TypeDef g_current_pid; /* 电流环PID参数结构体 */
/**
* @brief pid初始化
* @param 无
* @retval 无
*/
void pid_init(void)
{
/* 初始化位置环PID参数 */
g_location_pid.SetPoint = 0.0; /* 目标值 */
g_location_pid.ActualValue = 0.0; /* 期望输出值 */
g_location_pid.SumError = 0.0; /* 积分值*/
g_location_pid.Error = 0.0; /* Error[1]*/
g_location_pid.LastError = 0.0; /* Error[-1]*/
g_location_pid.PrevError = 0.0; /* Error[-2]*/
g_location_pid.Proportion = L_KP; /* 比例常数 Proportional Const */
g_location_pid.Integral = L_KI; /* 积分常数 Integral Const */
g_location_pid.Derivative = L_KD; /* 微分常数 Derivative Const */
/* 初始化速度环PID参数 */
g_speed_pid.SetPoint = 0.0; /* 目标值 */
g_speed_pid.ActualValue = 0.0; /* 期望输出值 */
g_speed_pid.SumError = 0.0; /* 积分值 */
g_speed_pid.Error = 0.0; /* Error[1] */
g_speed_pid.LastError = 0.0; /* Error[-1] */
g_speed_pid.PrevError = 0.0; /* Error[-2] */
g_speed_pid.Proportion = S_KP; /* 比例常数 Proportional Const */
g_speed_pid.Integral = S_KI; /* 积分常数 Integral Const */
g_speed_pid.Derivative = S_KD; /* 微分常数 Derivative Const */
/* 初始化电流环PID参数 */
g_current_pid.SetPoint = 0.0; /* 目标值 */
g_current_pid.ActualValue = 0.0; /* 期望输出值 */
g_current_pid.SumError = 0.0; /* 积分值*/
g_current_pid.Error = 0.0; /* Error[1]*/
g_current_pid.LastError = 0.0; /* Error[-1]*/
g_current_pid.PrevError = 0.0; /* Error[-2]*/
g_current_pid.Proportion = C_KP; /* 比例常数 Proportional Const */
g_current_pid.Integral = C_KI; /* 积分常数 Integral Const */
g_current_pid.Derivative = C_KD; /* 微分常数 Derivative Const */
}PID运算
int Encode_now = gtim_get_encode(); /* 获取编码器值,用于计算速度 */
speed_computer(Encode_now, 5); /* 中位平均值滤除编码器抖动数据,5ms计算一次速度 */
if (val % SMAPLSE_PID_SPEED == 0) /* 进行一次pid计算 */
{
if (g_run_flag) /* 判断电机是否启动了 */
{
g_motor_data.location = (float)Encode_now; /* 获取当前编码器总计数值,用于位置闭环控制 */
integral_limit(&g_location_pid , 1000 ,-1000); /* 位置环积分限幅 */
integral_limit(&g_speed_pid , 200 ,-200); /* 速度环积分限幅 */
integral_limit(&g_current_pid , 150 ,-150); /* 电流环积分限幅 */
if( (g_location_pid.Error <= 20) && (g_location_pid.Error >= -20) ) /* 设置闭环死区 */
{
g_location_pid.Error = 0; /* 偏差太小了,直接清零 */
g_location_pid.SumError = 0; /* 清除积分 */
}
g_motor_data.motor_pwm = increment_pid_ctrl(&g_location_pid, g_motor_data.location); /* 位置环PID控制(最外环) */
if (g_motor_data.motor_pwm >= 120) /* 限制外环输出(目标速度) */
{
g_motor_data.motor_pwm = 120;
}
else if (g_motor_data.motor_pwm <= -120)
{
g_motor_data.motor_pwm = -120;
}
g_speed_pid.SetPoint = g_motor_data.motor_pwm; /* 设置目标速度,外环输出作为内环输入 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_speed_pid, g_motor_data.speed); /* 速度环PID控制(次外环) */
if ( g_motor_data.motor_pwm > 0) /* 判断速度环输出值是否为正数 */
{
dcmotor_dir(0); /* 输出为正数,设置电机正转 */
}
else
{
g_motor_data.motor_pwm = -g_motor_data.motor_pwm; /* 输出取反 */
dcmotor_dir(1); /* 设置电机反转 */
}
if (g_motor_data.motor_pwm >= 100) /* 限制外环输出(目标电流) */
{
g_motor_data.motor_pwm = 100;
}
g_current_pid.SetPoint = g_motor_data.motor_pwm; /* 设置目标电流,外环输出作为内环输入 */
g_motor_data.motor_pwm = increment_pid_ctrl(&g_current_pid, g_motor_data.current); /* 电流环PID控制(内环) */
if (g_motor_data.motor_pwm >= 8200) /* 限制占空比 */
{
g_motor_data.motor_pwm = 8200;
}
else if (g_motor_data.motor_pwm <= 0) /* 滤掉无效输出 */
{
g_motor_data.motor_pwm = 0;
}
dcmotor_speed(g_motor_data.motor_pwm); /* 设置占空比 */
}
val = 0;
}
val ++;
【独一无二】](https://img-blog.csdnimg.cn/direct/ff92f588c458456d8762559369ac12dc.png)