例子:
我们如果使用new_current_thread来创建tokio的协程运行runtime时,
let rt = tokio::runtime::Builder::new_current_thread().enable_all().build().unwrap();
发现只有调用rt.block_on(...)才能触发。这里我们分析一下为何在new_current_thread的runtime下无法运行的原因。
代码1
fn testCoroutine4() {
thread::spawn(||{
let rt = tokio::runtime::Builder::new_current_thread().enable_all().build().unwrap();
let guard1 = rt.enter();
println!("trace1", );
rt.spawn(doSayHi());
println!("trace2", );
rt.spawn(doSayHi());
println!("trace3", );
}).join();
}这个无法运行的情况是由于执行完最后代码println!("trace3", );之后,线程直接就退出了,没有机会做调用栈切换。
根据代码1的情况,我们考虑是否可以保持线程不退出(如代码2),这样是否可以执行到协程(doSayHi)呢?
代码2:
fn testCoroutine5() {
thread::spawn(||{
let rt = tokio::runtime::Builder::new_current_thread().enable_all().build().unwrap();
let guard1 = rt.enter();
println!("trace1", );
rt.spawn(doSayHi());
println!("trace2", );
rt.spawn(doSayHi());
println!("trace3", );
thread::sleep(Duration::from_secs(10));
}).join();
}
和遗憾,还是没有运行doSayHi,这是为什么呢?因为thread::sleep直接把线程sleep了,协程的调用栈也没有被切换。
我们来看一下可以运行的代码:
代码3:
fn testCoroutine6() {
thread::spawn(||{
let rt = tokio::runtime::Builder::new_current_thread().enable_all().build().unwrap();
let guard1 = rt.enter();
println!("trace1", );
let v1 = rt.spawn(doSayHi());
println!("trace2", );
let v2 = rt.spawn(doSayHi());
println!("trace3", );
rt.block_on(v1);
rt.block_on(v2);
}).join();
}输出:
我们可以看到可以正常打印了。所以我们来想一下协程需要依赖哪些情况才能运行:
1.没有退出的线程
2.有切换调用栈的入口
按照上面的思路,我们是否不用block_on(v1)也能保证协程运行能?其实是可以的,参看
fn testCoroutine4() {
thread::spawn(||{
let rt = tokio::runtime::Builder::new_current_thread().enable_all().build().unwrap();
let guard1 = rt.enter();
println!("trace1", );
rt.spawn(doSayHi());
println!("trace2", );
rt.spawn(doSayHi());
println!("trace3", );
loop {
rt.block_on(async {
println!("sleep start", );
time::sleep(Duration::from_secs(10)).await;
println!("sleep end", );
});
}
}).join();
}哈哈,可以看到,线程最后启动了一个和之前毫无关系的协程代码,里面只是一个sleep(注意!!这个是tokio的sleep),这个sleep的作用就是满足线程有一个协程切换的入口点。我们运行一下看看结果:
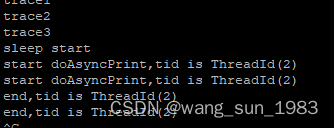
正常运行。不过这个代码只是用来验证我们对协程的认识,不建议正式代码中使用。
总结:
之前用过C语言的libco,它的原理是通过注册了libc的大部分posix的io操作函数,然后通过epoll来实现异步io来实现。例如读取socket的数据,如果没有数据,由于是异步io,所以直接切换到下一个调用栈。这样就实现了简单的协程。rust这块貌似对整个协程做了统一的接口管理?在协程中的sleep等操作一定要调用tokio的接口,否则就会直接造成卡死。哈哈。不过如果是multi_thread的话,实际上也没啥关系,就是直接将协程变成了线程操作,程序应该不会出现卡死。