文章目录
- 读写像素
- 修改像素值
- Vec3b与Vec3F
- 灰度图像增强
- 获取图像通道
- bitwise_not 算子对图像非操作
读写像素
读一个GRAY像素点的像素值(CV_8UC1) Scalar intensity = img.at(y, x); 或者 Scalar intensity = img.at(Point(x, y));
读一个RGB像素点的像素值 Vec3f intensity = img.at(y, x); float blue = intensity.val[0]; float green = intensity.val[1]; float red =
intensity.val[2];
修改像素值
灰度图像 img.at(y, x) = 128;
RGB三通道图像 img.at(y,x)[0]=128; // blue img.at(y,x)[1]=128; // green img.at(y,x)[2]=128; // red
空白图像赋值 img = Scalar(0);
ROI选择 Rect r(10, 10, 100, 100); Mat smallImg = img®;
Vec3b与Vec3F
- Vec3b对应三通道的顺序是blue、green、red的uchar类型数据。
- Vec3f对应三通道的float类型数据
- 把CV_8UC1转换到CV32F1实现如: src.convertTo(dst, CV_32F);
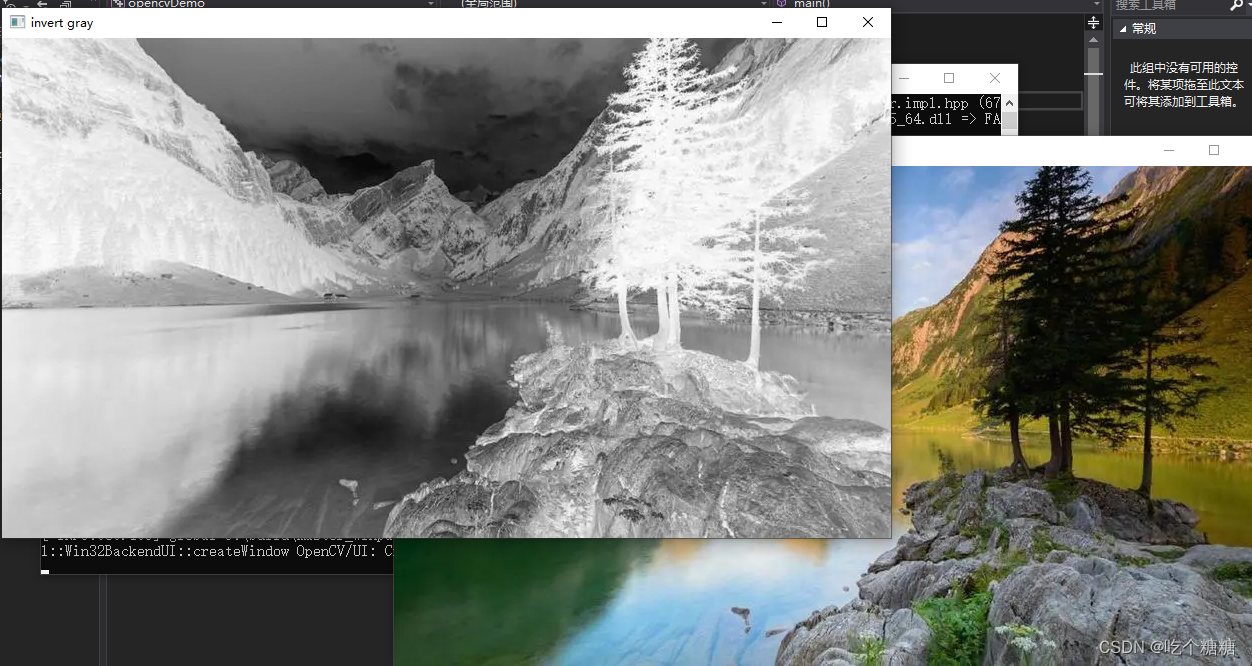
灰度图像增强
可以用增强图像加钱图像的辨析度
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("test.jpg");//读取图片
if (src.empty())
{
cout << "could not load img...";
return -1;
}
namedWindow("test");//设置窗口名称
imshow("test", src);
//灰度图像反转
Mat gray_image;
cvtColor(src, gray_image, COLOR_BGR2GRAY);// 转换为灰度图
namedWindow("invert gray");
imshow("invert gray", gray_image);
int width = gray_image.cols;//获取图像的宽高
int high = gray_image.rows;
for (int i = 0; i < high; i++)
{
for (int j = 0; j < width; j++)
{
int gray = gray_image.at<uchar>(i, j);//获取行列坐标点
gray_image.at<uchar>(i, j) = 255 - gray;//图像反转
}
}
namedWindow("invert gray");
imshow("invert gray", gray_image);
waitKey(0);
return 0;
}
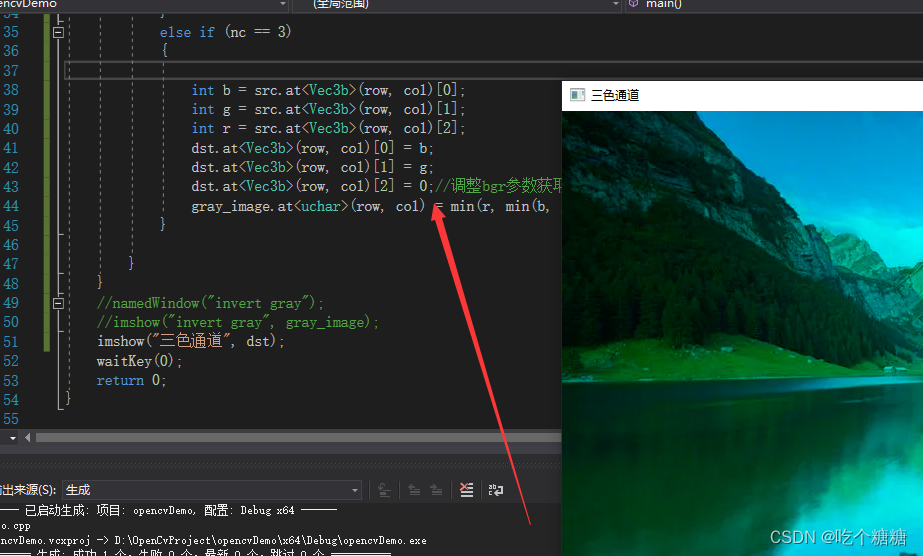
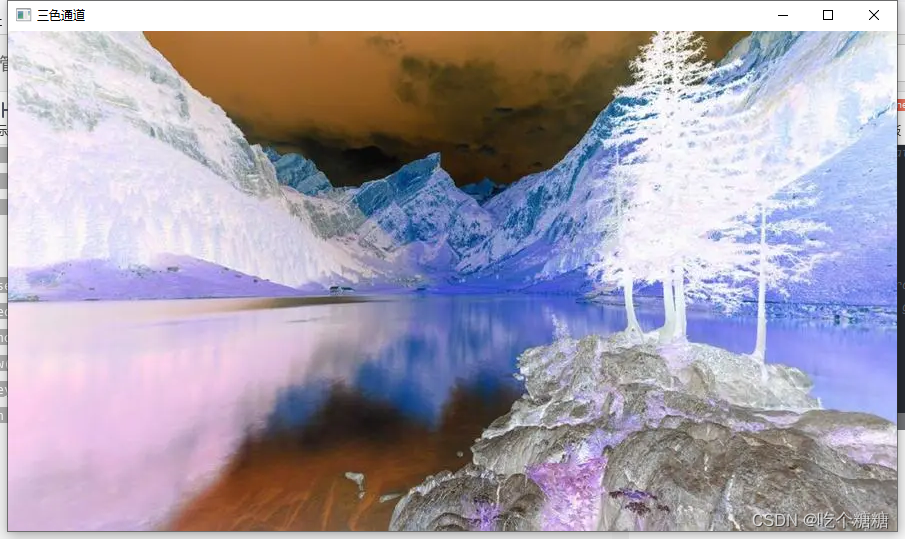
获取图像通道
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("test.jpg");//读取图片
if (src.empty())
{
cout << "could not load img...";
return -1;
}
namedWindow("test");//设置窗口名称
imshow("test", src);
//灰度图像反转
Mat gray_image;
cvtColor(src, gray_image, COLOR_BGR2GRAY);// 转换为灰度图
//namedWindow("invert gray");
//imshow("invert gray", gray_image);
int width = gray_image.cols;//获取图像的宽高
int high = gray_image.rows;
int nc = src.channels();//获取通道值
Mat dst;
dst.create(src.size(), src.type());
for (int row = 0; row < high; row++)
{
for (int col = 0; col < width; col++)
{
if (nc == 1)//单通道
{
int gray = gray_image.at<uchar>(row, col);//获取行列坐标点
gray_image.at<uchar>(row, col) = 255 - gray;//图像反转
}
else if (nc == 3)
{
int b = src.at<Vec3b>(row, col)[0];
int g = src.at<Vec3b>(row, col)[1];
int r = src.at<Vec3b>(row, col)[2];
dst.at<Vec3b>(row, col)[0] = b;
dst.at<Vec3b>(row, col)[1] = g;
dst.at<Vec3b>(row, col)[2] = r;//调整bgr参数获取想要的效果
gray_image.at<uchar>(row, col) = min(r, min(b, g));//获取rgb的最小值
}
}
}
//namedWindow("invert gray");
//imshow("invert gray", gray_image);
imshow("三色通道", dst);
waitKey(0);
return 0;
}
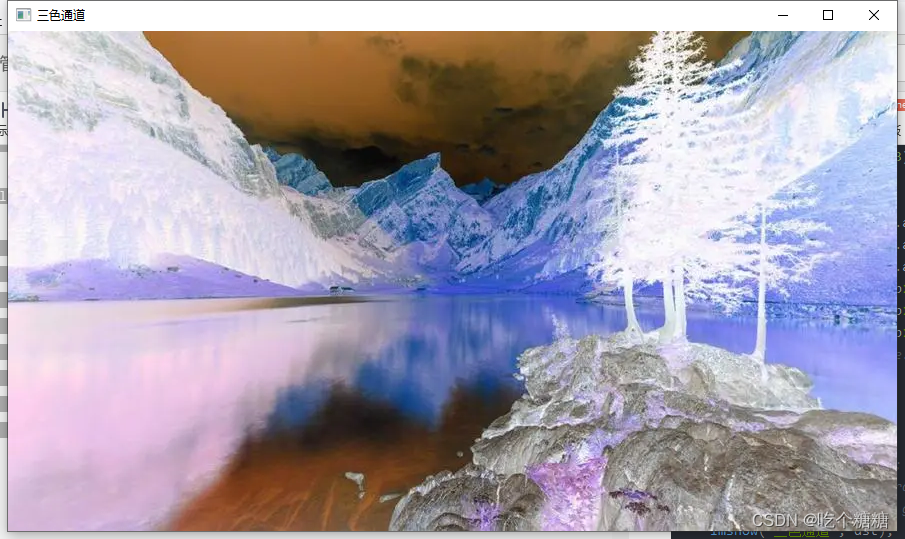
bitwise_not 算子对图像非操作
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("test.jpg");//读取图片
if (src.empty())
{
cout << "could not load img...";
return -1;
}
namedWindow("test");//设置窗口名称
imshow("test", src);
//灰度图像反转
Mat gray_image;
cvtColor(src, gray_image, COLOR_BGR2GRAY);// 转换为灰度图
//namedWindow("invert gray");
//imshow("invert gray", gray_image);
int width = gray_image.cols;//获取图像的宽高
int high = gray_image.rows;
int nc = src.channels();//获取通道值
Mat dst;
dst.create(src.size(), src.type());
//for (int row = 0; row < high; row++)
//{
// for (int col = 0; col < width; col++)
// {
// if (nc == 1)//单通道
// {
// int gray = gray_image.at<uchar>(row, col);//获取行列坐标点
// gray_image.at<uchar>(row, col) = 255 - gray;//图像反转
// }
// else if (nc == 3)
// {
//
// int b = src.at<Vec3b>(row, col)[0];
// int g = src.at<Vec3b>(row, col)[1];
// int r = src.at<Vec3b>(row, col)[2];
// dst.at<Vec3b>(row, col)[0] = b;
// dst.at<Vec3b>(row, col)[1] = g;
// dst.at<Vec3b>(row, col)[2] = 0;//调整bgr参数获取想要的效果
// gray_image.at<uchar>(row, col) = min(r, min(b, g));//获取rgb的最小值
// }
//
// }
//}
bitwise_not(src, dst);
//namedWindow("invert gray");
//imshow("invert gray", gray_image);
imshow("三色通道", dst);
waitKey(0);
return 0;
}
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("test.jpg");//读取图片
if (src.empty())
{
cout << "could not load img...";
return -1;
}
namedWindow("test");//设置窗口名称
imshow("test", src);
//灰度图像反转
Mat gray_image;
cvtColor(src, gray_image, COLOR_BGR2GRAY);// 转换为灰度图
//namedWindow("invert gray");
//imshow("invert gray", gray_image);
int width = gray_image.cols;//获取图像的宽高
int high = gray_image.rows;
int nc = src.channels();//获取通道值
Mat dst;
dst.create(src.size(), src.type());
for (int row = 0; row < high; row++)
{
for (int col = 0; col < width; col++)
{
if (nc == 1)//单通道
{
int gray = gray_image.at<uchar>(row, col);//获取行列坐标点
gray_image.at<uchar>(row, col) = 255 - gray;//图像反转
}
else if (nc == 3)
{
int b = src.at<Vec3b>(row, col)[0];
int g = src.at<Vec3b>(row, col)[1];
int r = src.at<Vec3b>(row, col)[2];
dst.at<Vec3b>(row, col)[0] = 255-b;
dst.at<Vec3b>(row, col)[1] = 255-g;
dst.at<Vec3b>(row, col)[2] = 255-r;//调整bgr参数获取想要的效果
//gray_image.at<uchar>(row, col) = min(r, min(b, g));//获取rgb的最小值
}
}
}
//bitwise_not(src, dst);
//namedWindow("invert gray");
//imshow("invert gray", gray_image);
imshow("三色通道", dst);
waitKey(0);
return 0;
}
![[分类指标]准确率、精确率、召回率、F1值、ROC和AUC、MCC马修相关系数](https://img-blog.csdnimg.cn/direct/ec34e11aee0b42db8b8a119319207bb4.png)

![[CISCN2019 华北赛区 Day2 Web1]Hack World 1 题目分析与详解](https://img-blog.csdnimg.cn/direct/2cbd5b93d0114c1b94ab42ced97d86bd.png)