基于遗传算法求解机器人最短路径规划问题(栅格地图)的仿真结果
仿真结果:

路径长度的变化曲线:

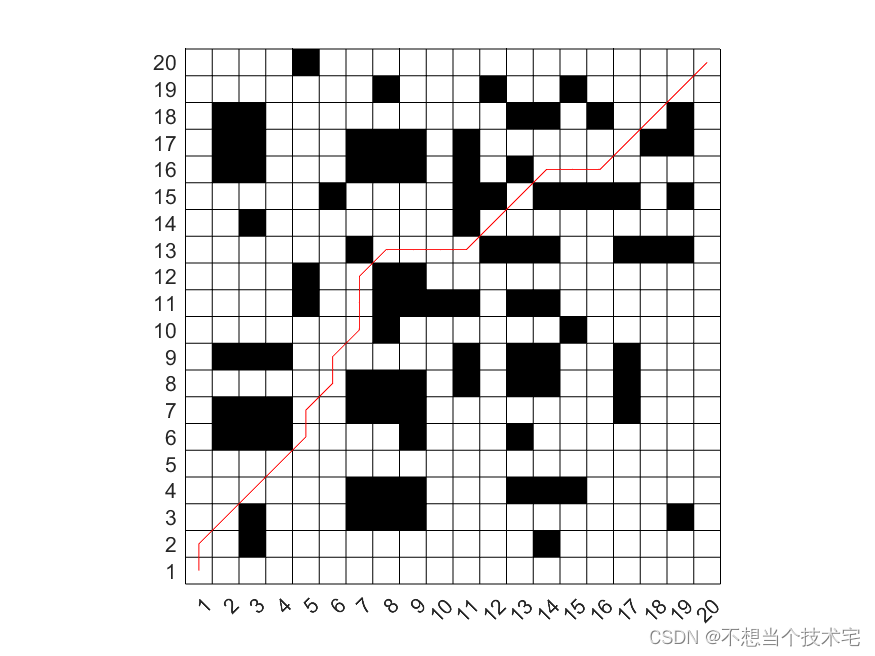
遗传算法优化后的机器人避障路径:
基于遗传算法求解机器人最短路径规划问题(栅格地图)的仿真结果
仿真结果:
路径长度的变化曲线:
遗传算法优化后的机器人避障路径:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1476064.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!
![[AIGC] JDK17中的Record类介绍](https://img-blog.csdnimg.cn/img_convert/b9a5b0ec992a0c4b0c17a97f4f805de4.jpeg)