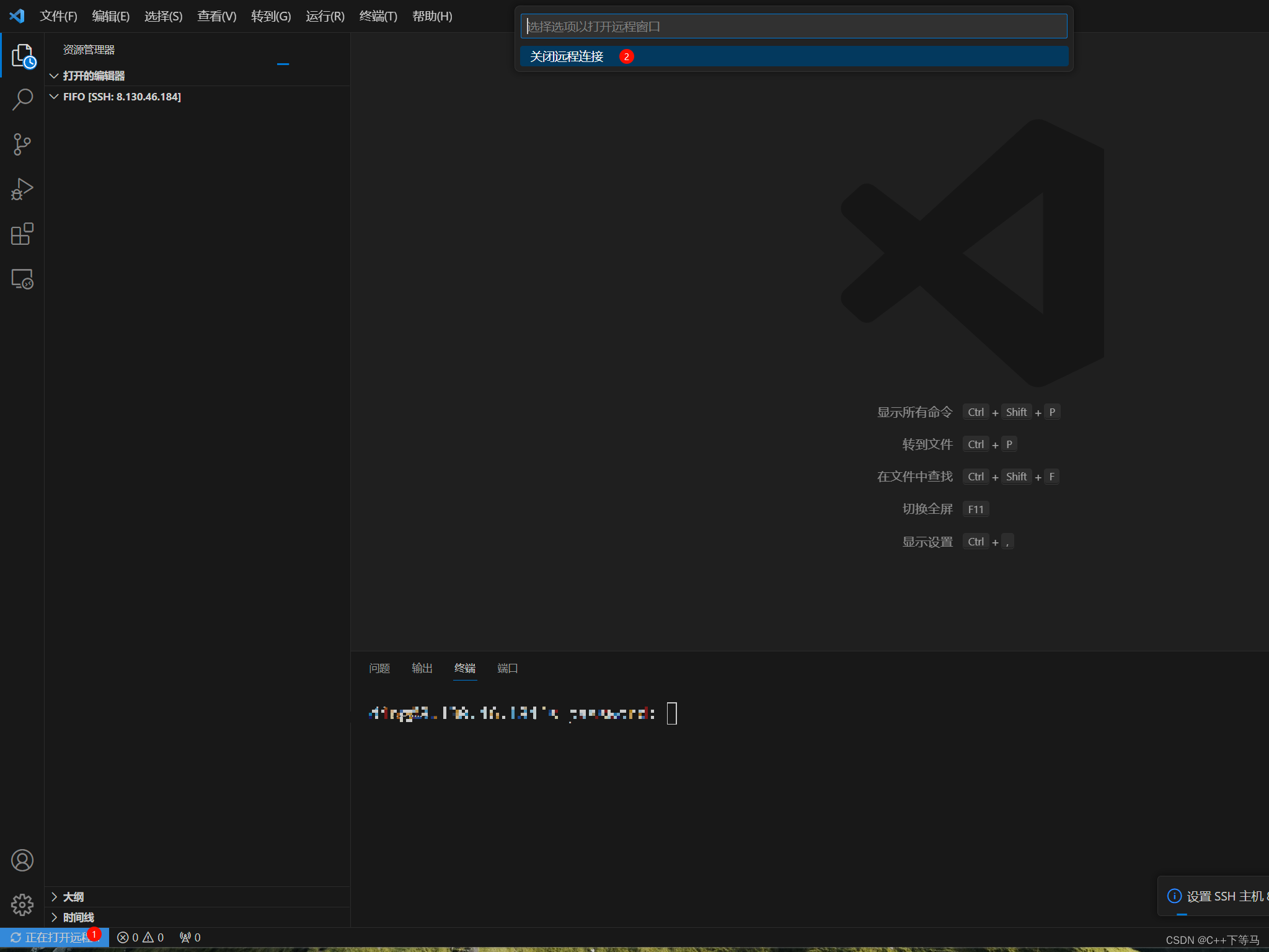
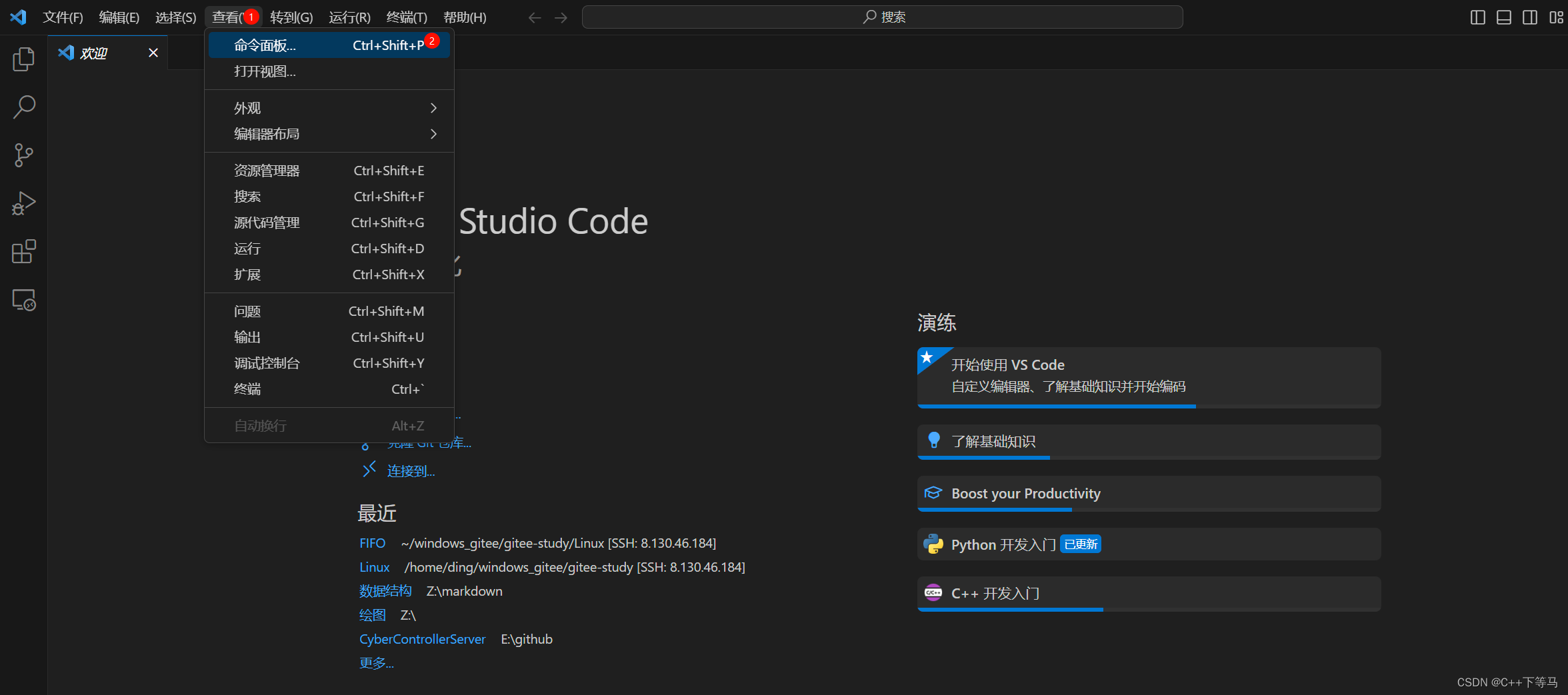
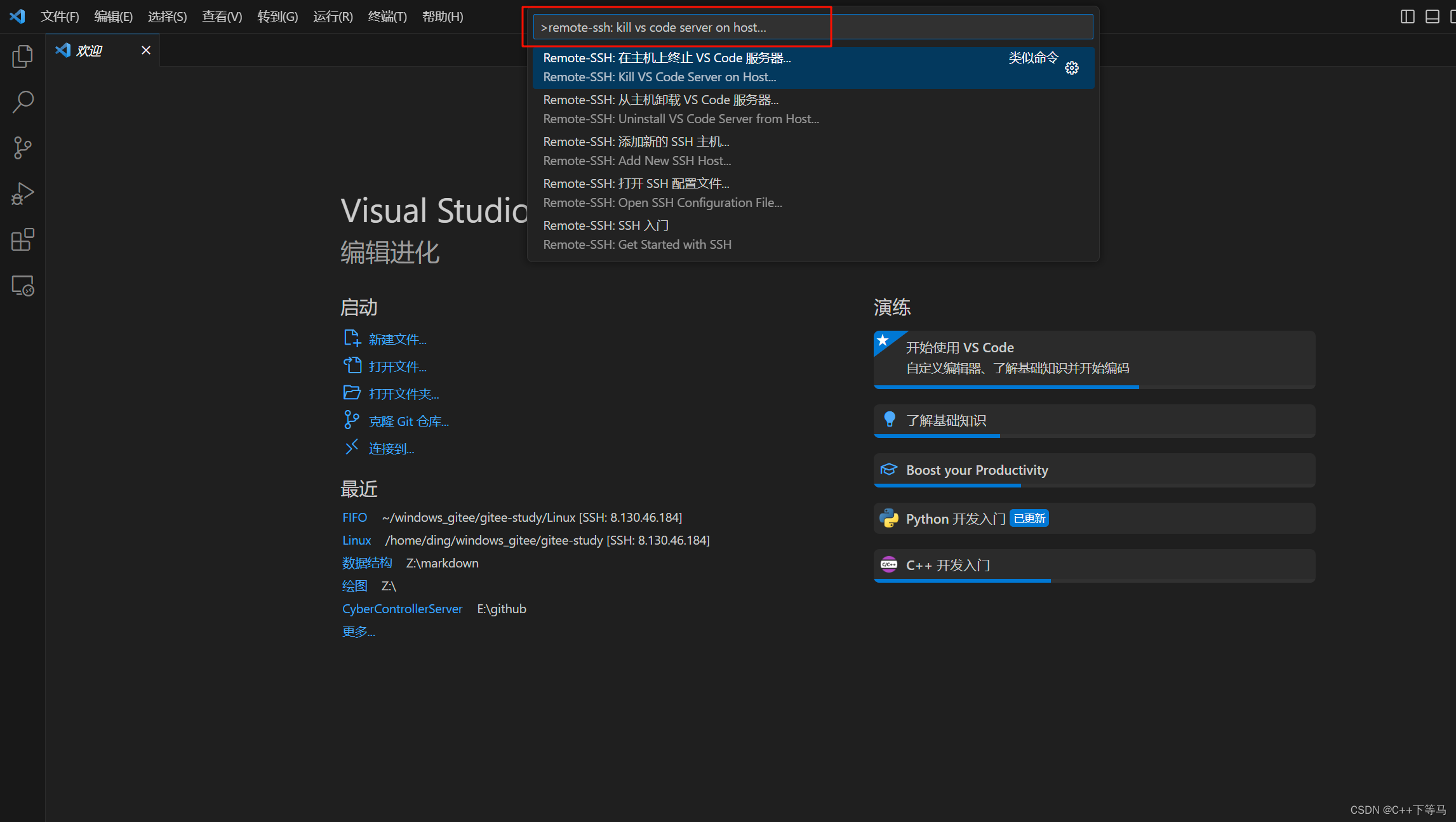
VScode连接远端服务器一直输入密码解决方法
news2026/2/11 11:10:19
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1472698.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
真正理解微软Windows程序运行机制——窗口机制(第一部分)
我是荔园微风,作为一名在IT界整整25年的老兵,今天说说Windows程序的运行机制。经常被问到MFC到底是一个什么技术,为了解释这个我之前还写过帖子,但是很多人还是不理解。其实这没什么,我在学生时代也被这个问题困绕过。…

【日常聊聊】Sora- 探索AI视频模型的无限可能
🍎个人博客:个人主页
🏆个人专栏:日常聊聊
⛳️ 功不唐捐,玉汝于成 目录
前言
正文
方向一:技术解析
方向二:应用场景
方向三:未来展望
方向四:伦理与创意
方向…

深入理解JS的执行上下文、词法作用域和闭包(下)
🤍 前端开发工程师、技术日更博主、已过CET6 🍨 阿珊和她的猫_CSDN博客专家、23年度博客之星前端领域TOP1 🕠 牛客高级专题作者、打造专栏《前端面试必备》 、《2024面试高频手撕题》 🍚 蓝桥云课签约作者、上架课程《Vue.js 和 E…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
vue3自定义实现悬浮固定按钮组件
目录 一、需求描述二、代码解读三、结果展示 一、需求描述
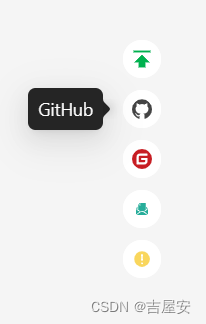
需要5个固定的悬浮圆,居于页面的右侧。鼠标悬浮在圆上面会显示对应的文字提示其中包含返回顶部悬浮圆,当页面滑至底部时出现,点击页面滑到顶部。点击按钮会给出弹窗
二、代码解读…
LCR 172. 统计目标成绩的出现次数
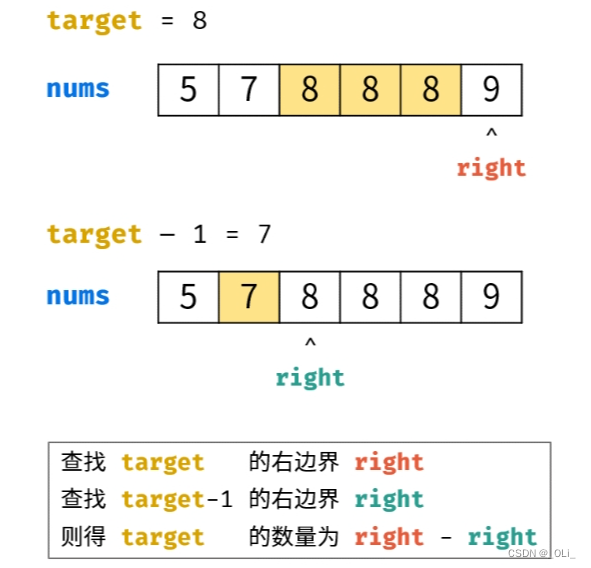
解题思路:二分查找
题解一 class Solution {public int countTarget(int[] scores, int target) {// 搜索右边界 rightint i 0, j scores.length - 1;while(i < j) {int m (i j) / 2;if(scores[m] < target) i m 1;else j m - 1;}int right i;// 若数…
UE5 C++ Gas开发 学习记录(一)
一个新坑,在TPS的空余时间学习
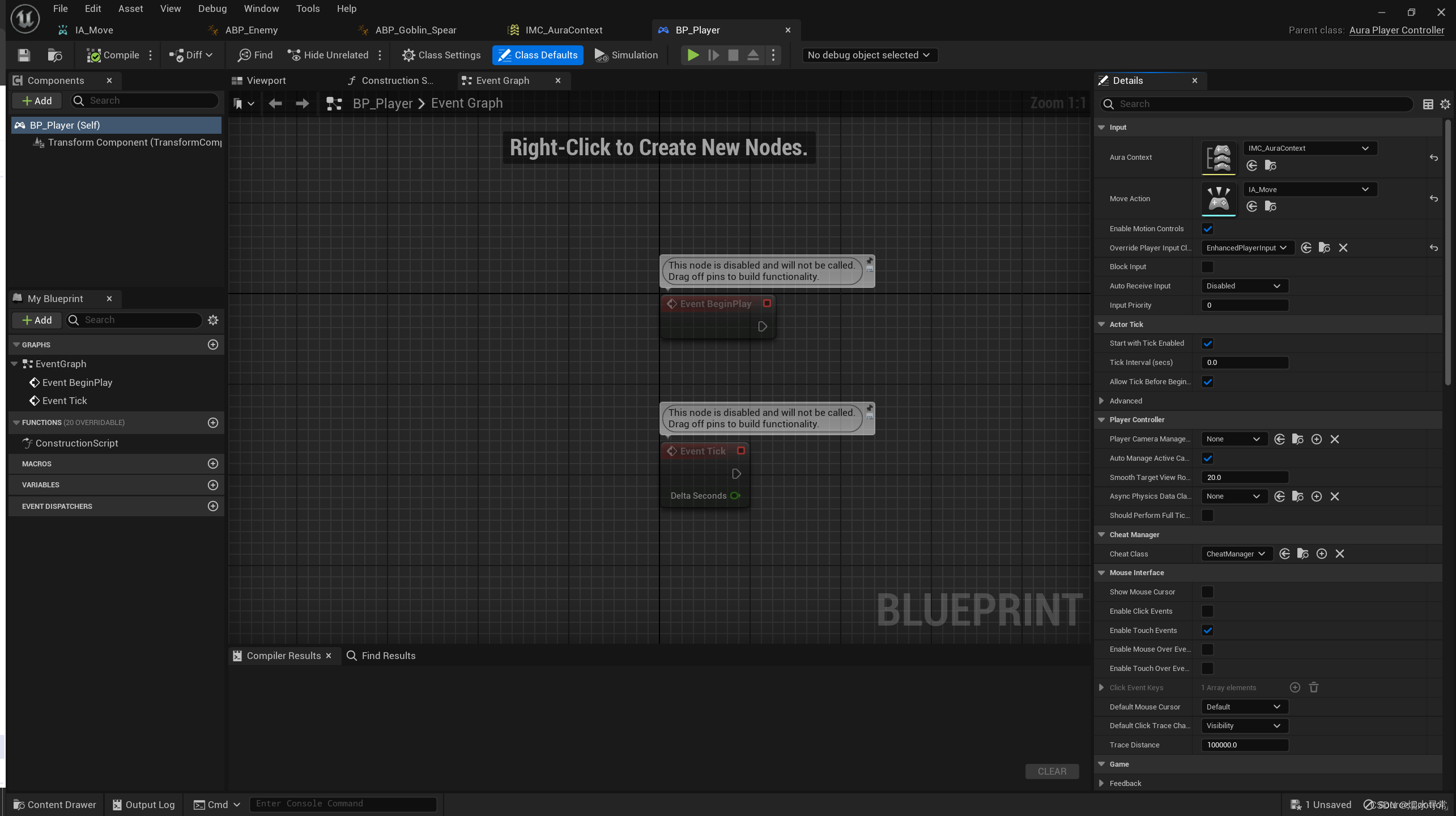
创建了自己,敌人的BaseCharacter和子类,创建了Gamemode,创建了Controller AuraCharacterBase.h // Fill out your copyright notice in the Description page of Project Settings. #pragma once #include "CoreMinimal.h" #include &…
H264/H265基本编码参数1
本文主要讲解一些视频编码相关的基本概念
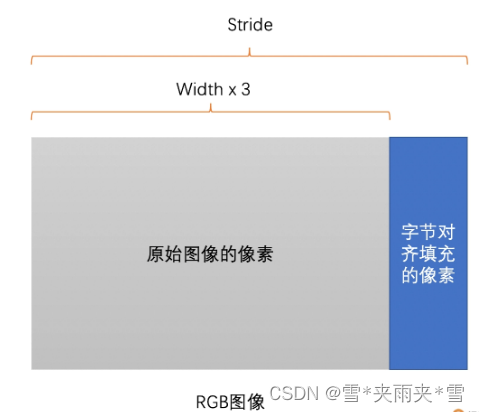
像素
像素是图像的基本单元,一个个像素就组成了图像。你可以认为像素就是图像中的一个点。我们来直观地看看像素是怎么组成图像的。在下面这张图中,你可以看到一个个方块,这些方块就是像素。
分辨…
【GameFramework框架内置模块】4、内置模块之调试器(Debugger)
推荐阅读 CSDN主页GitHub开源地址Unity3D插件分享简书地址QQ群:398291828 大家好,我是佛系工程师☆恬静的小魔龙☆,不定时更新Unity开发技巧,觉得有用记得一键三连哦。
一、前言
【GameFramework框架】系列教程目录:…

开启数字内容创作的新时代
目录
技术解析
未来展望 技术解析
Sora是一款由OpenAI开发的先进AI视频模型,其技术架构基于深度学习和自然语言处理技术。该模型的核心算法原理包括使用深度神经网络进行视频内容的理解、生成和互动。
在技术架构方面,Sora采用了一种混合的神经网络结…
五种多目标优化算法(NSWOA、MOJS、MOAHA、MOPSO、NSGA2)性能对比(提供MATLAB代码)
一、5种多目标优化算法简介
1.1NSWOA 1.2MOJS 1.3MOAHA 1.4MOPSO 1.5NSGA2 二、5种多目标优化算法性能对比
为了测试5种算法的性能将其求解9个多目标测试函数(zdt1、zdt2 、zdt3、 zdt4、 zdt6 、Schaffer、 Kursawe 、Viennet2、 Viennet3)࿰…

15:00面试,15:06就出来了,问的问题过于变态了。。。
我从一家小公司转投到另一家公司,期待着新的工作环境和机会。然而,新公司的加班文化让我有些始料未及。虽然薪资相对较高,但长时间的工作和缺乏休息使我身心俱疲。
就在我逐渐适应这种高强度的工作节奏时,公司突然宣布了一则令人…

EXCEL如何从另一个表查找匹配信息
目录
1.背景:我们有一个目标呈现表,想要从另一个表中查询得到信息,比如根据身份证id查询该id的名字、性别等个人基本信息,或者从另一个财务信息表查询该id的工资信息等;
2.基础方法:利用VLOOKUP函数根据单…
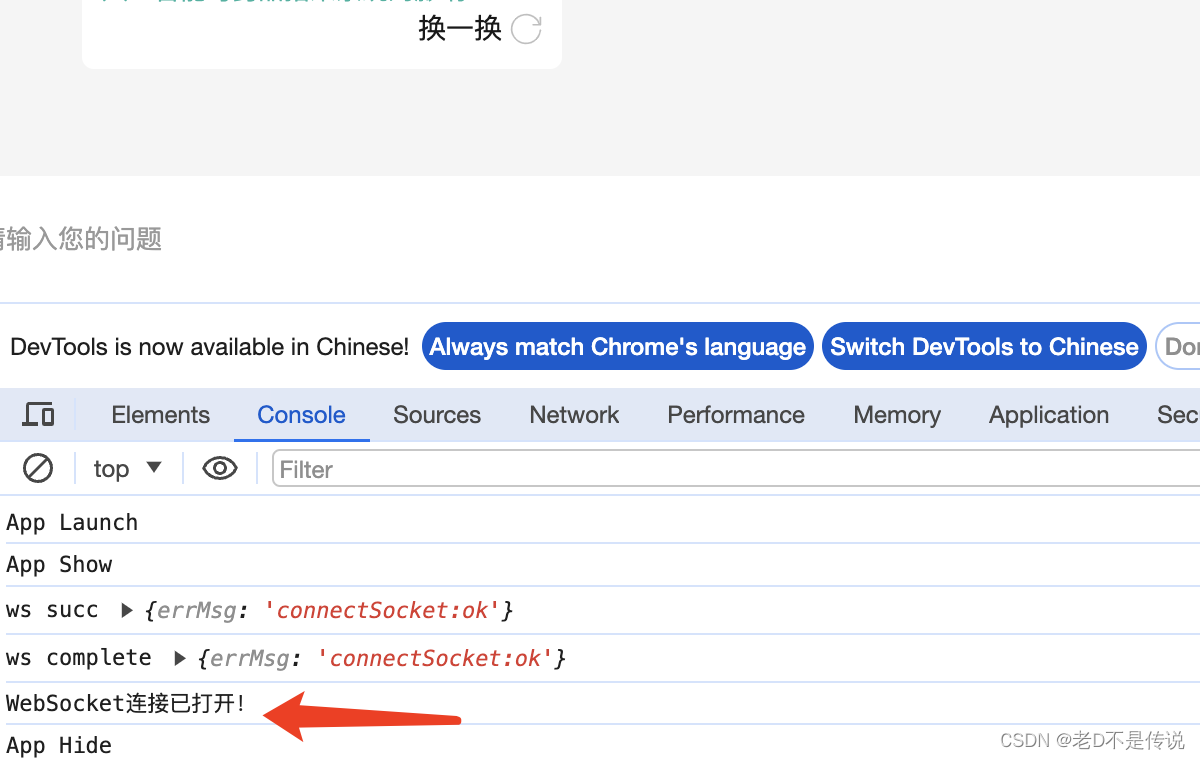
NGINX服务器配置实现加密的WebSocket连接WSS协议
一、背景
最近在做小程序开发,需要在nginx中配置websocket加密模式,即wss。初次配置wss时,踩了两个小时的坑,本文将踩坑过程分享给大家,有需要用到的伙伴可以直接copy即可实现,节省宝贵时间。
二、WebSo…
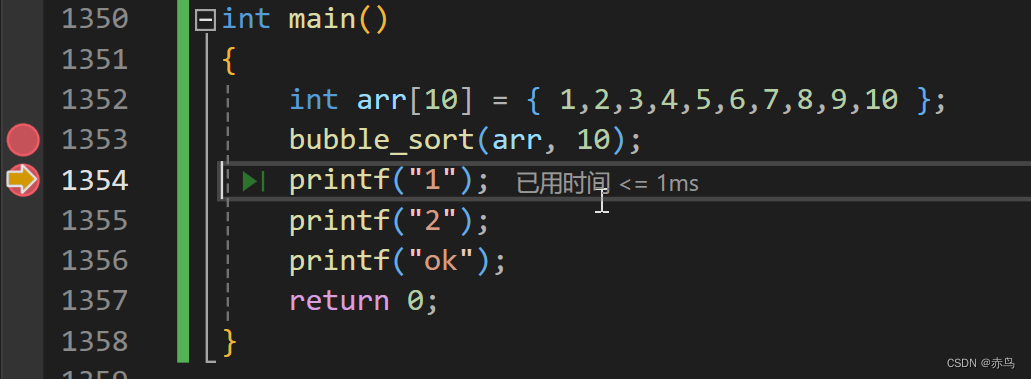
VS2022调试技巧(一)
什么是bug?
在1945年,美国科学家Grace Hopper在进行计算机编程时,发现一只小虫子钻进了一个真空管,导致计算机无法正常工作。她取出虫子后,计算机恢复了正常,由此,她首次将“Bug”这个词用来描…
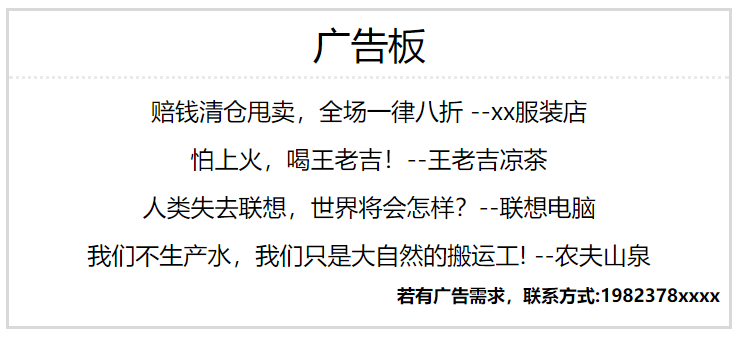
用html编写的小广告板
用html编写的小广告板
相关代码
<!DOCTYPE html>
<html lang"en">
<head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Document</tit…
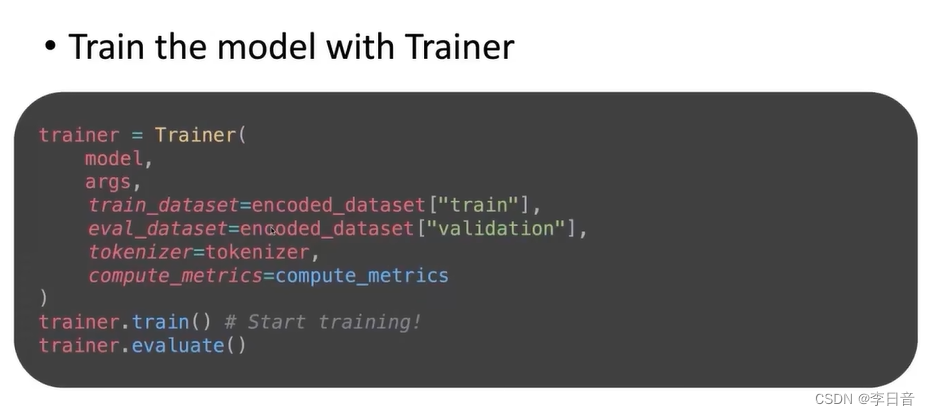
刘知远LLM——Transformer与预训练模型
文章目录 注意力机制原理介绍注意力机制的各种变式注意力机制的特点 Transformer结构概述Transformer整体结构 输入层byte pair encodingpositional encoding Transformer BlockEncoder BlockMulti-Head Attention Decoder Block其他tricks总结 预训练语言模型语言建模概述预训…
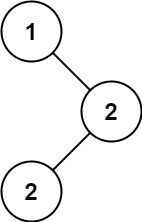
二叉搜索树题目:二叉搜索树中的众数
文章目录 题目标题和出处难度题目描述要求示例数据范围进阶 解法一思路和算法代码复杂度分析 解法二思路和算法代码复杂度分析 解法三思路和算法代码复杂度分析 题目
标题和出处
标题:二叉搜索树中的众数
出处:501. 二叉搜索树中的众数
难度
3 级
…

Shell脚本介绍及脚本功能
文章目录 一、什么是shell二、hello word2.1 echo2.2第一个脚本 三、Bash的基本功能3.1别名3.2常用快捷键3.3输入输出3.4 输出重定向3.5 多命令执行3.6 管道符3.7 通配符和特殊符号 一、什么是shell
Shell 是一个用 C 语言编写的程序,它是用户使用 Linux 的桥梁。S…