线性求解相机几何参数的缺点
上一章节介绍学习了(DLT)线性求解相机几何参数,了解到线性求解法当中比较明显的缺点:
- 没有考虑到镜头畸变的影响
- 不能引入更多的约束条件融入到DLT算法当中优化
- 最关键的是,代数距离并不是计算相机矩阵的最佳距离函数
基于以上问题点,提出非线性求解方法。
- 将包括镜头畸变参数、内外参矩阵等所有信息都当做待求解
- 定义一个比代数距离更好的距离函数
- 通过迭代的非线性最优化算法,最优化上述距离函数,从而得到待求解
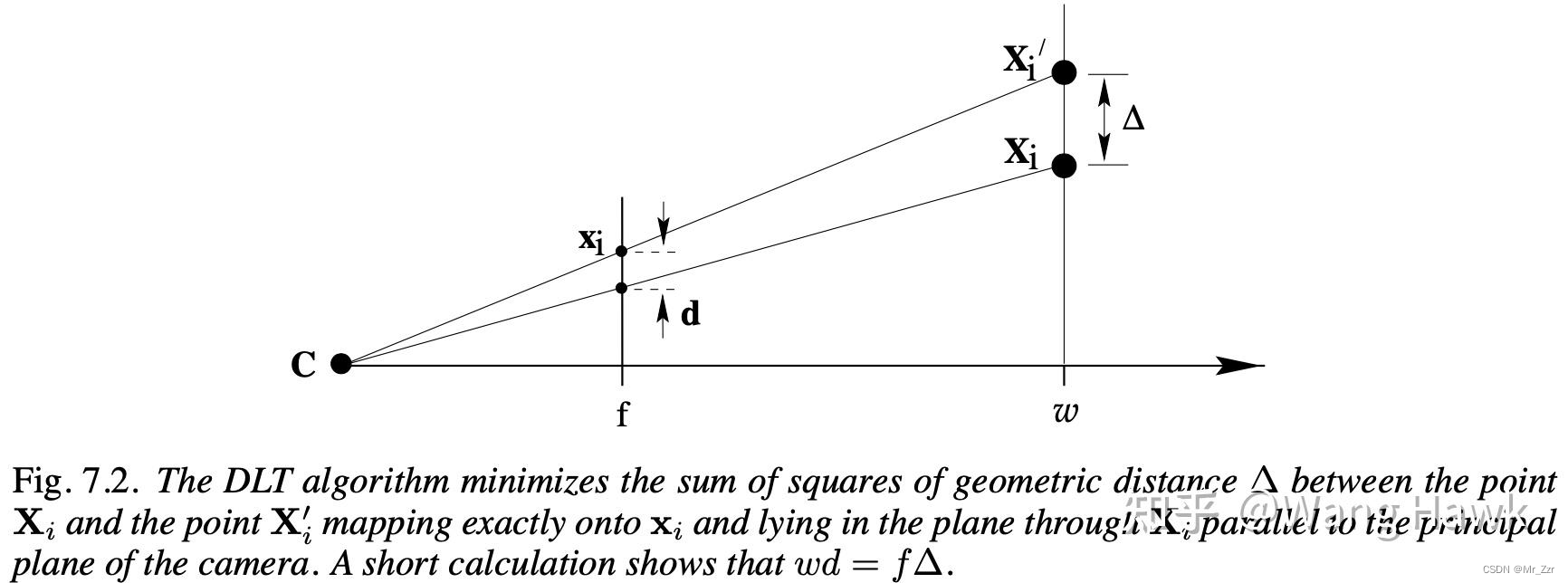
在《计算机视觉中的多视角几何》的第7.2节中,用一个插图来说明了线性求解出来的代数距离的几何意义。可以看见,代数距离实际上优化的是已知的3D点X和2D点Xi的反投影点Xi'之间的距离。这并不是一个最优的距离函数。
下面我们来看看几何距离,这里假设3D点的位置是准确的(比如我们有一个制作得非常精确的标定板),如下图所示。那么几何距离就是3D点Xi通过投影矩阵投影的2D点xi'和实际成像的2D点xi之间的距离(下图中的红线段)
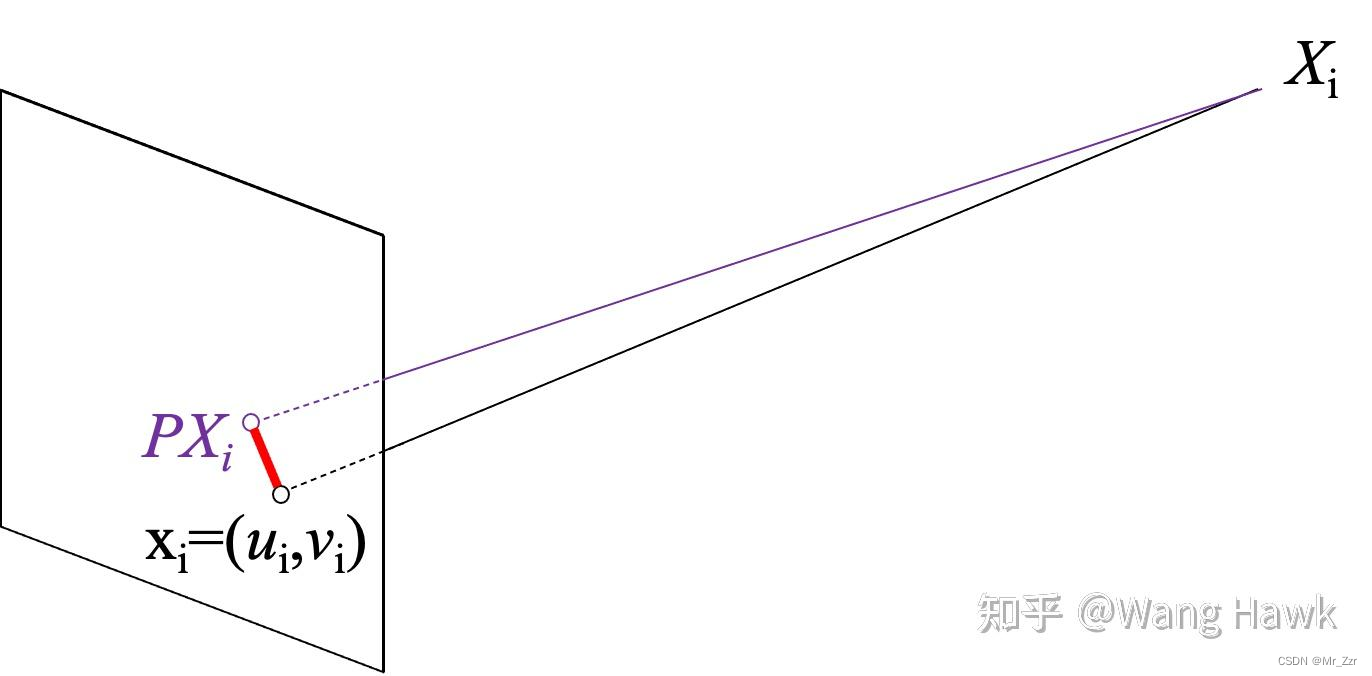
用公式表达式如下所示,整个优化过程就变成了最小化这个距离的过程,如(2)式
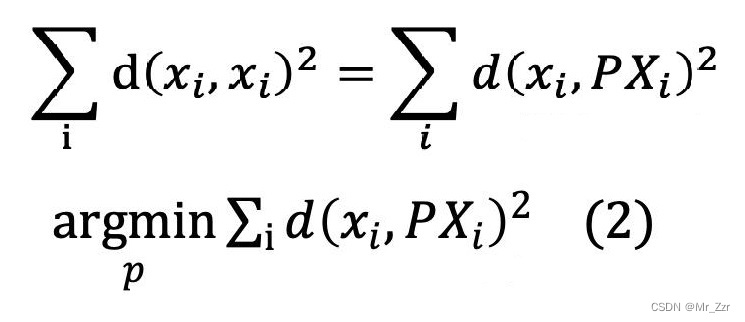
结合之前在 相机的成像(畸变)模型 中的数学模型,式子(2)又可以演变为如下的式子(3)

为了执行这个最优化的过程,需要给相机矩阵及畸变参数初始值。其中P的初始值可以用第一节所讲述的DLT算法得到。而畸变参数的初值可以先设置为0。
张正友标定法的实现和完整的过程
在相机几何标定的各种算法中,最出名的无疑是张正友博士发明的“张氏标定法”,这个算法在整个业界得到了广泛的应用,它最大的特点就是灵活、鲁棒、低成本。整个标定过程只需要用相机在不同的方向拍摄平面标定板(最少两次),而它实际上的核心思想就是我上面描述的非线性优化求解方法。
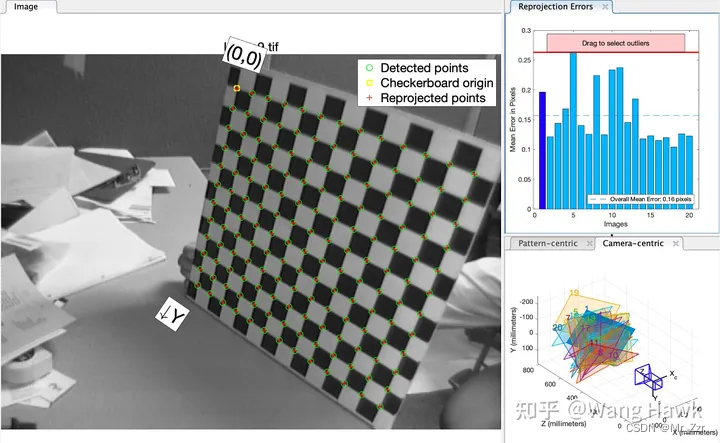
在Matlab和OpenCV中都有张氏标定法的实现,具体使用时先准备好一个足够平整的棋盘格标定板,然后通过不同的方向对标定板进行拍摄,然后进行计算。不需要提前知道相机和标定板之间的具体位姿关系,每次拍摄时的相机和标定板的位姿变换也是独立的,整个使用过程非常友好。
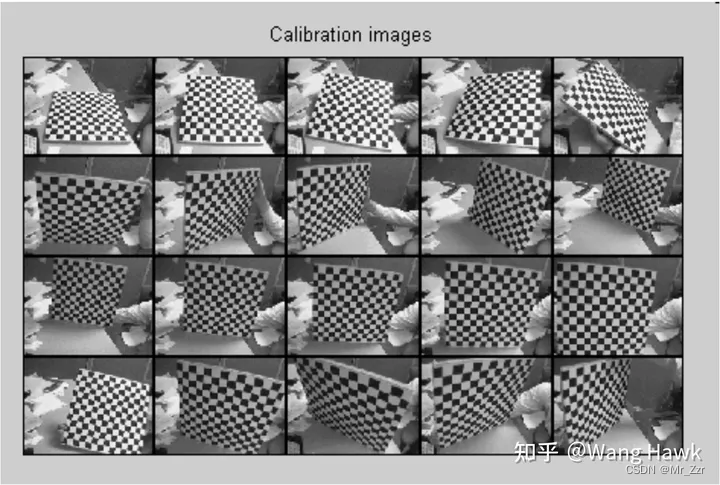
在Matlab中,把上面这些图像输入算法,算法会自动检测出棋盘格角点,并利用前面说的方法优化出各项参数,如果某幅图的平均投影误差超出了用户设置的阈值,还可以方便的过滤掉这幅图来重新进行优化计算。甚至还可以可视化每次拍摄时相机和标定板的位姿,非常方便。
下面简单介绍张正友标定法的关键知识要点。
要点1:引入新的约束条件,从而可以采用平面标定板替代立体标定板
之前讲过标定板需要是立体的,否则无法唯一确定相机矩阵。 然而,立体的标定板是较难去制作的,张氏标定法追求的是低成本的标定方式,因此采用了多次拍摄平面标定板的方式来执行标定。而正因为是多次拍摄,所以每次拍摄时相机矩阵都是变化的,之前讲解的约束条件不再适用:
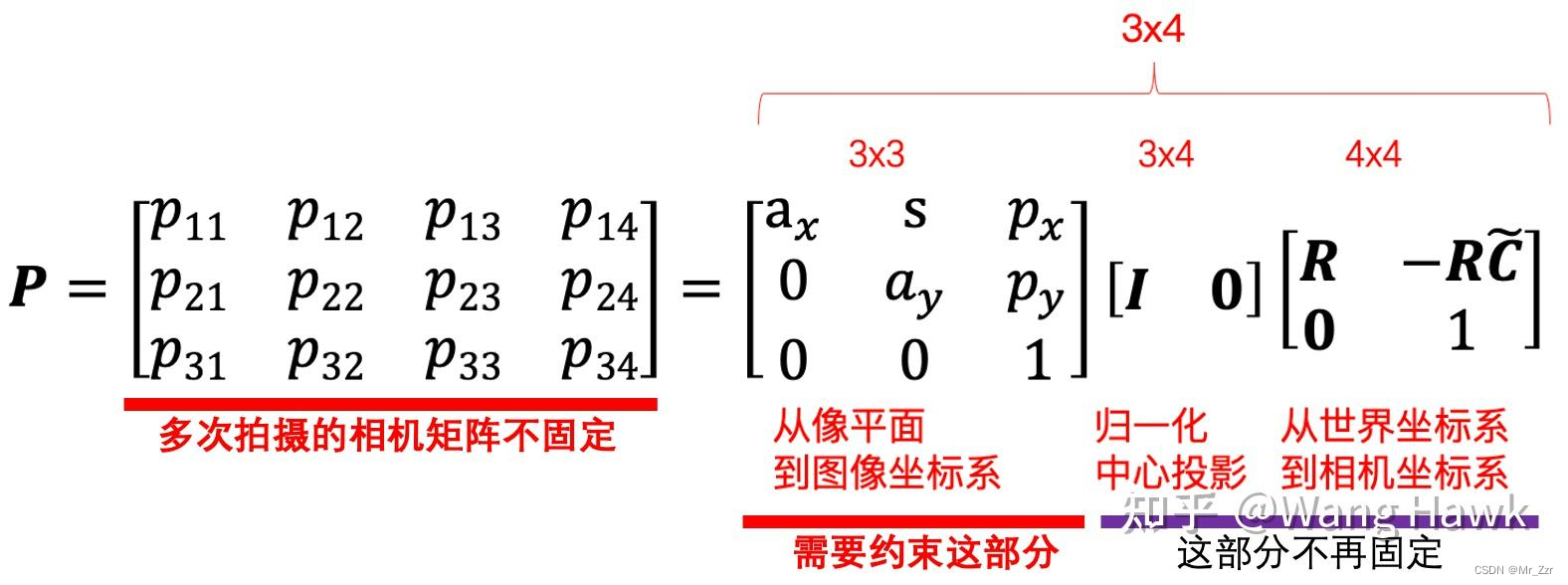
因此,张氏标定法重新寻求了新的约束条件,用于对内参矩阵进行约束,进而进行求解。作者观察到平面板上的点和对应的像点之间可以用一个单应矩阵H关联在一起,而且只要平面板上的角点足够多(单应矩阵有8个自由度,一对点提供2个约束,所以理论上超过4个即可),就可以求出这个单应矩阵,求解方法类似于上一节所介绍的DLT方法;或者之前学习过的 几何变换模型 中的透视模型,利用最小二乘法求解。
接下重点:作者将单应矩阵表达为H,并观察到内参矩阵K和单应矩阵之间存在着一对约束关系。
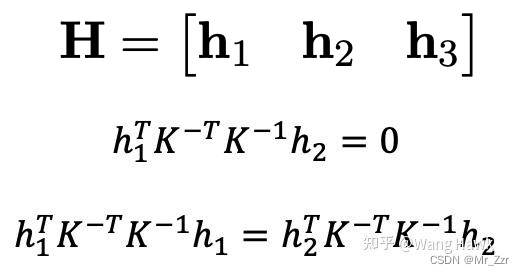
怎么理解上面的两个等式?回想 机器视觉【1】相机的成像(畸变)模型 整合:世界坐标系→像素坐标系的知识点
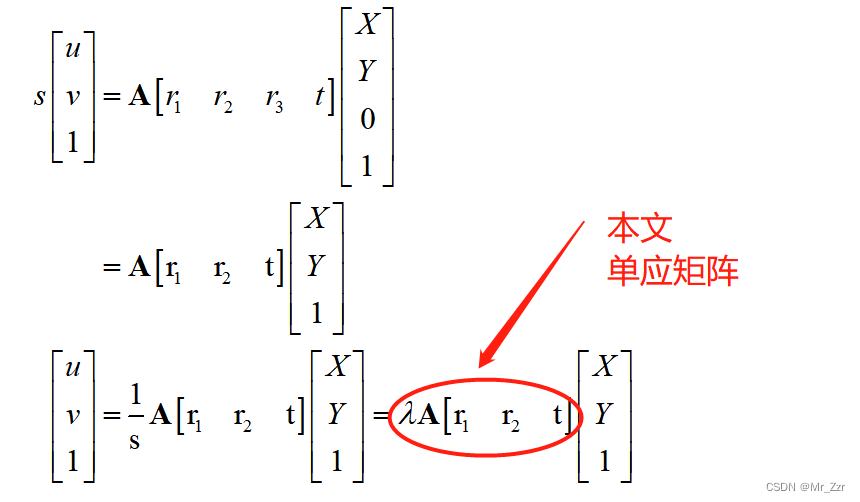
这里的λ只是1/s的另一种表示,只是换了一种写法
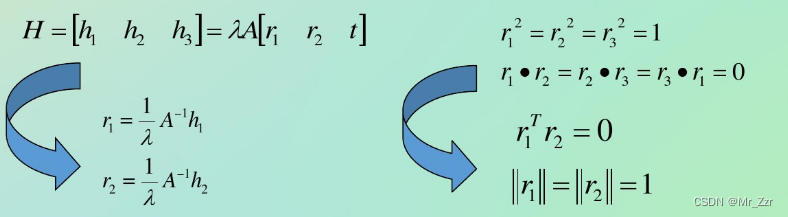
这里有人会不理解,r1=和r2=是怎么来的?其实自己可以推导一下,把A设成[3X3]的矩阵,乘进去,应该能够看到,组成了[Ar1 Ar2 Ar3],它们互相还是独立的。至于为什么A到A逆,这个是线性代数最基本的转换,左右同时左乘A逆,就变过来了。
这里的A其实就是内参矩阵K,上面两个式子其实不难证明 (以下 A' 为 矩阵A的逆 即上图示的A-1)
由前置知识:A'H = A' · λ · A · [r1 r2 t] = [r1 r2 t],λ是常数可暂时忽略
根据线性代数基本规律:(AB)T = BT · AT 即 矩阵A和B相乘之后的转置等于B的转置乘A的转置
那么:(h1)T * (A)−T * (A)−1 * h2 = r1T * r2 = 0
第一个公式证得r1和r2是正交的关系。
对第二个式子左右两边进行上述变换,得 r1T * r1 = r2T * r2,由此可知 r1和r2是单位正交。
最后,我们把上述的两个式子中间 (K)-T*(K)-1的部分记作B,其余h部分利用线性基础变换写出另外一部分。即如下表示
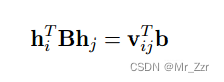
这样,我们又可以用SVD奇异值分解的方式,求得b,进而求得K的各个元素。当求得了K之后,就很容易得到这一次拍摄时的外参信息(旋转R和平移t)了。上面讲的方法用于初始化内参矩阵K和每次拍摄的外参R和t,我们假设一共进行n次拍摄,每次拍摄可以获得m个成像点,那么就可以利用非线性最优化方法,来最优化待解参数了。具体表达式如下:
要点2:在多次拍摄时,需要改变标定板的方向
在张博士的论文中详述了如果两次拍摄时的标定板是平行的,那么实际上并没有提供额外的信息,也因此无法求解出需要的参数。
要点3:最少需要拍摄几幅图?
前面讲到,每一幅拍摄的标定板图像提供了2个对内参矩阵K的约束,而我们内参矩阵K一共有5个未知参数,所以理论上至少需要拍摄3幅图像,才能求得K:

如果我们认为s=0,即传感器像素是规整方形的,那么内参矩阵就只有4个未知参数了,这样就只需要拍摄两幅图像就能进行标定了。
前面讲过,这样的约束关系是为了求得比较好初始化内参矩阵K的。如果你能够事先知道K中元素的大概值,比如你认为s=0, 主点位于图像的中心, 而焦距又是已知的,那么理论上你只需要拍摄一幅平面的标定板一次,就可以通过非线性最小二乘法标定出相机的内外参数。
Reference:
张正友相机标定全解析_定焦相机张正友标定法怎么用-CSDN博客
相机标定(具体过程详解)张正友、单应矩阵、B、R、T_已知内参数下标定r、t-CSDN博客
总结
前文和本文中讲解了相机标定的两大类方法:线性求解方法,以及非线性求解方法。
不管是哪种方法,我都提到了数据归一化的重要性,因为在求解过程中的矩阵元素如果不经过归一化,值差异较大,很容易放大数值误差,需要特别注意这点。经过相机的标定,我们就可以获得了包括畸变参数在内的相机内参,以及每次拍摄时的外参。
博主我的自述:
说实话,之前是知道这一块比较复杂,但没想过是这么复杂。现实接触的情况都是用现成的库或者软件工具一键处理,这次花力气去理解算是 "拨开云雾见天日,守得云开见月明",新的一年祝大家工作顺利,万事如意,大家加油!