目录
知乎同名账号同步发表
无/自监督去噪(1)——一个变迁:N2N→N2V→HQ-SSL
读前须知
注意:本文不含 L 0 L_0 L0 loss的理论分析及相关实验,仅对N2N原文部分实验进行解析,主要从数学角度分析N2N为什么能work。
1. 前置知识——L1和L2 loss的特性
此处参考https://www.cnblogs.com/wangguchangqing/p/12021638.html
此部分仅讲述特性。 L 2 L_2 L2 loss或者叫均方误差(MSE),简单来说就是预测值和GT之间差值的平方的均值。MSE的特点是曲线光滑、连续、处处可导。MSE对离群点比较敏感,如果样本中存在离群点,则会给离群点更高的权重,这样会牺牲正常点数据的预测结果,降低总体性能。当离极小值较远的时候,梯度也比较大,好处是初期可能因此收敛快,坏处是可能遭遇梯度爆炸的情况。
至于 L 1 L_1 L1 loss,或者叫均绝对误差(MAE),是预测值和GT之间差值的绝对值的均值。MAE曲线在极小值处不可导,同时在大部分情况下梯度都是相等的,这意味着对于很小的损失值(此时需要慢点下降)梯度显得大,而对于很大的损失值(此时需要快速收敛)梯度显得小。也许这样不利于模型的收敛,但是梯度较为稳定,不会导致梯度爆炸问题,而且具有较为稳健的解。正因为损失很大时梯度也保持和小损失时的一致,所以MAE对离群点不是太敏感。
⭐️为了便于理解,我在此举例:如果我们给了一堆数据点,并以它拟合了一条直线。大部分数据点都在直线上或者直线附近,但是存在极少量数据点距离直线较远,明显偏离了直线所能描述的情况。这种极少数的点我们称之为离群点。进一步,我给一个定义叫:离群性,它能够描述一个点的离群程度。表现在这个例子上即为距离直线越远的数据点,离群性越高。
⭐️均值和中位数是两种不同的概念,在本文中,我采用一个新颖的观点描述它们的区别:离群性是均值和中位数区别的来源。假设有一个样本集合,其中90%的值都是145~155,只有10%的值为0~10,我们姑且可以认为在0~10之间的值表示离群点,它们的离群性较高。显然,它们的中位数将会是145~150之间,也许就刚好是150,进一步,如果样本集合中没有10%的离群点,中位数的结果似乎不会有太大的影响,就仿佛在求解中位数时,离群点被“忽略”了一样;然而,它们的均值会受到离群点较大的影响,也许会明显低于150,因为均值要充分考虑离群点,进一步,极端情况下如果那10%的数字范围在-1000000000左右,那么最终求得的均值将会远远偏离150这个数量级,此时均值将不能描述这个样本集的基本状况。由此,我们给出该角度下均值和中位数的根本区别:均值是充分考虑到离群点的统计量,考虑的是全面;中位数是适当舍弃离群点的统计量,考虑的是大局
⭐️给定一个样本,90%都是150,10%是0。当采用 L 2 L_2 L2 loss时,由于会考虑到所有样本点,预测值会低于150,向均值收敛;当采用 L 1 L_1 L1 loss时,由于可能会忽略离群点,预测值倾向于向150——也就是中位数收敛。
有了此部分补充,我们接下来仔细了解Noise2Noise的几个实验,以及它们对应的理论分析。(关于Noise2Noise的简单讲解,可以参考我之前的文章,或者自行搜索相关详解。读者需要格外注意 L 2 L_2 L2 loss和 L 1 L_1 L1 loss的区别,Noise2Noise针对不同的任务采用了不同的loss。简单回顾结论:用 L 2 L_2 L2 loss则向均值mean收敛,用 L 1 L_1 L1 loss则向中位数median收敛)
2. additive Gaussian noise (spatial independent noise), L 2 L_2 L2首杀
满足噪声零均值假设,故而此项实验采用 L 2 L_2 L2 loss,根据前文分析,这会使得网络输出的每个像素收敛到mean——也就是 E ( 信号 + 噪声 ) = 信号 + E ( 噪声 ) = 信号 E(信号+噪声)=信号+E(噪声)=信号 E(信号+噪声)=信号+E(噪声)=信号
数据集为 256 × 256 256 \times 256 256×256的patches,来自IMAGENET validation set的50k张图片。对于每个训练数据,随机添加标准差为 σ ∈ [ 0 , 50 ] \sigma ∈ [0, 50] σ∈[0,50]的加性高斯噪声。作者称这是盲去噪,因为magnitude(大小,数量级) of noise也是未知的。
通过实验,作者说明无论从效果还是收敛速度的角度,在加性高斯噪声去噪任务中,有监督学习都是没有必要的。不过需要注意加性高斯噪声在所有像素中都是独立同分布的(i.i.d.),也就是说该项实验应对的是spatial independent noise
3. brown Gaussian noise (spatial dependent noise), L 2 L_2 L2双杀
作者在加性高斯噪声的实验介绍部分,插入了brown Gaussian noise去噪任务的讲解。此项试验同样采用 L 2 L_2 L2 loss,但是在收敛速度上有所区别。
For brown Gaussian noise, we observe that increased inter-pixel noise correlation (wider spatial blur; one graph per bandwidth) slows convergence down
博主对brown Gaussian noise不太了解,该引用是论文原文内容,它的意思是:当增加了像素间的noise correlation时,网络的收敛速度会变慢。加性高斯噪声是spatial independent noise,brown Gaussian noise是spatial dependent noise。
⭐️通过一个例子讲讲我个人的理解——为什么增加inter-pixel noise correlation时,会造成网络的收敛速度变慢?假设现在有三个靶子,你需要用枪射击。每个靶子上有一个致命位置,但是你不知道在哪里。如果每次射击过后,我都会告诉你一个假的坐标,骗你这是该靶子的致命位置。N2N的思想就是如果我给的若干错误答案,其平均值是正确答案,那么你就能学会打靶。当增加inter-pixel noise correlation时,相当于增加这样的条件:如果你打第一个靶子偏左,那么第二个靶子一定会偏右。这样就破坏了随机性,仔细思考一下N2N的数学基础,其核心是噪声是随机的且均值为0。如果添加了inter-pixel noise correlation,噪声就倾向于变成一个结构信息,没准一张inter-pixel noise correlation足够强的noisy image,只保留noise的部分,你也能一眼看出有意义的内容。网络在学习的过程中,正是因为 随机噪声 → 随机噪声 随机噪声→随机噪声 随机噪声→随机噪声这一 随机 → 随机 随机→随机 随机→随机的映射无法学习,所以才会向mean收敛。然而,网络是有感受野的,因此结构信息(structural information)是可学习的。如果这个随机噪声在若干相邻像素组成的patch中表示了一种structural information,那么网络就会因此试图产生学习行为,这样方才提到的 随机 → 随机 随机→随机 随机→随机这一映射,在少量feed forward+back propagation(单个epoch)中就很难被网络判定为不可学的。虽然inter-pixel correlated noise具备structural information,但不同epoch的noise,通过它们对应的structural information们并无法总结出统一的规律,仍旧具备随机性。所以,在经历了较大的epoch后,网络无法总结出大量epoch的structural information之间的规律,于是网络才会逐渐判定 随机噪声 → 随机噪声 随机噪声→随机噪声 随机噪声→随机噪声这一映射无法学习,便会向mean收敛。
综上,添加inter-pixel noise correlation时,或者noise拥有more spatial dependent时,网络需要更多的epoch来确认 随机噪声 → 随机噪声 随机噪声→随机噪声 随机噪声→随机噪声这一映射无法学习,“认识到”向mean收敛才是光明大道。总之当变成spatial dependent noise时,收敛速度会变慢,这些是有些文章(比如SA-SSID, 2023 CVPR)将N2N归类为只能处理spatial independent noise的算法的原因。不过根据原文来看,最终效果还可以,较为接近有监督学习,即便是extreme blur的情况。
⭐️此实验说明N2N可以应对spatial dependent noise,即包含inter-pixel noise correlation的情况,只是收敛速度相较于spatial independent noise更慢。
4. blind text removal, L 2 L_2 L2导致结果偏灰, L 1 L_1 L1前来破局
该项实验采用 L 1 L_1 L1 loss,根据前文分析,网络输出的像素点倾向于收敛到中位数。
我们先简单介绍该项实验的概况:

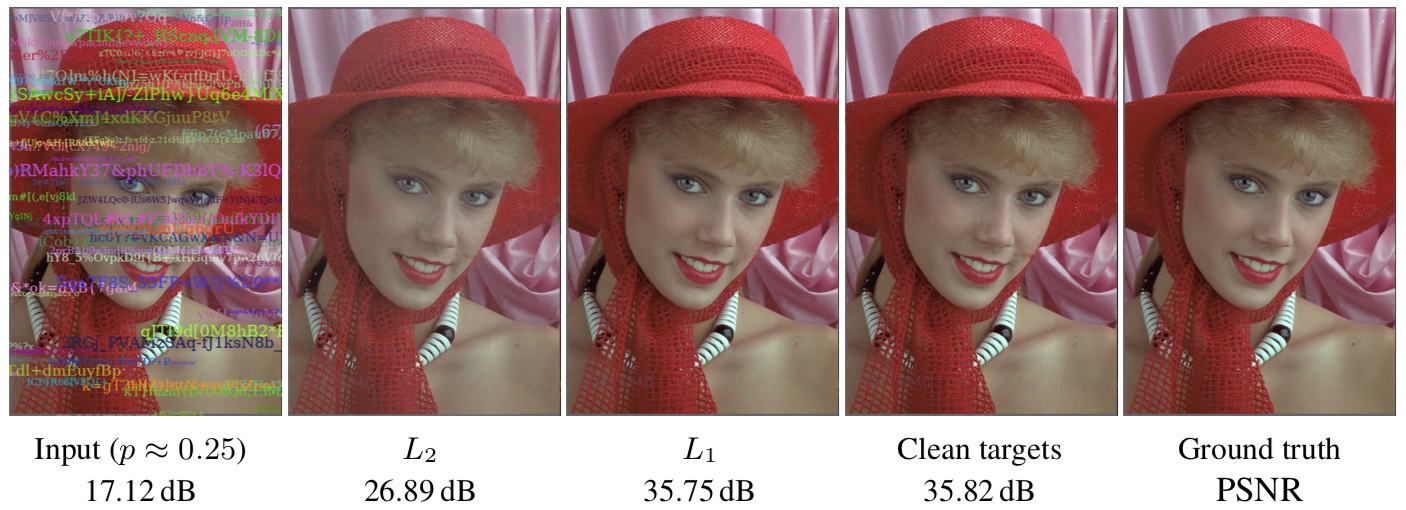
将大量随机颜色的文字添加到图片上,对图片原本的内容形成一定的遮盖。这些文字的方向和字体保持不变。需注意这些文字的颜色和位置都是随机的,而且和图像原本的signal pixel没有关联。该任务的目标就是将随机添加的文字都从图片中去除掉,理想的输出是原始的图片。注意所添加的文字数量是有限的,在训练阶段 p p p在 [ 0 , 0.5 ] [0,0.5] [0,0.5]之间,p表示每个像素被遮盖的概率;在测试阶段 p p p大约是 0.25 0.25 0.25。
在继续之前,我们先看一下中灰色,因为它和理解作者原文描述密切相关。网上搜索了一个中灰色的色号:
GSB05-1426-2001 72 B02色号的RGB色值为(114,123,124)
可以以此判断RGB均在0~255的平均值,颜色的视觉效果就是中灰色。接下来我们看原文中的一段话:
In this test the mean (L2 loss) is not the correct answer because the overlaid text has colors unrelated to the actual image, and the resulting image would incorrectly tend towards a linear combination of the right answer and the average text color (medium gray).
原作者的意思是这里的mean不代表correct answer,因为所添加的大量随机颜色的文字,经过叠加之后的平均值应该是中灰色这一RGB为0~255平均值的颜色。也就是说根据Noise2Noise的理论,如果在这里直接用 L 2 L_2 L2 loss进行训练,会导致像素被还原为中灰色,而不是signal pixel。
不过,我们可以考虑用 L 1 L_1 L1 loss,因为 p p p (每个像素被遮盖的概率)的值在 [ 0 , 0.5 ] [0,0.5] [0,0.5]这个范围,意味着一个像素点没有被遮盖的概率更大一些。此时样本的中位数倾向于为原始图像信号,而非添加的文字像素。我们可以视添加的文字像素点具备一定的离群性(此概念详见前文),而 L 1 L_1 L1的作用就是抑制具备离群性的数据,推动网络还原出原始图像信号。摘录一段作者原文如下:
However, with any reasonable amount of overlaid text, a pixel retains the original color more often than not, and therefore the median is the correctstatistic.
在该任务中,mean不能代表正确的图像信号,所以不能用
L
2
L_2
L2 loss促进网络向预测出mean收敛,但是median(中位数)恰恰是正确的统计量,所以采用
L
1
l
o
s
s
L_1 loss
L1loss促进网络向预测出median收敛。通过实验结果,可以发现
L
2
L_2
L2 loss效果比较差,
L
1
L_1
L1 loss更佳:
5(选读). ——random-valued impulse noise, 使用 L 0 L_0 L0的情况(无理论分析)
论文原文有Dirac(狄拉克)字样,此处附上狄拉克分布资料:https://blog.csdn.net/hy592070616/article/details/120605471
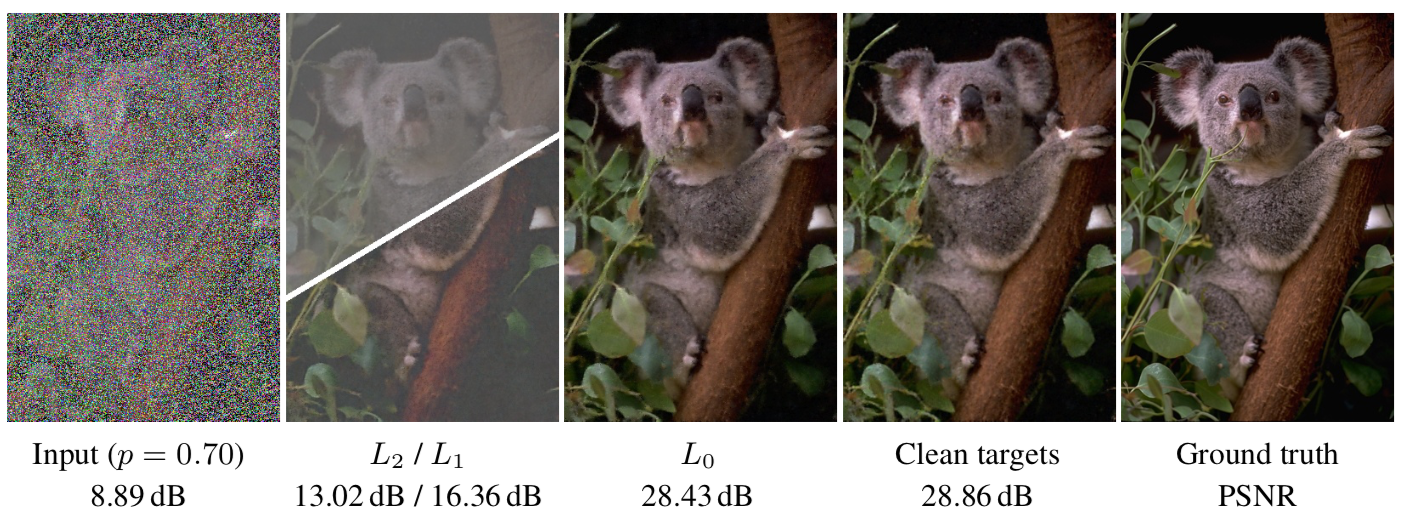
对于图像中每个像素点,依概率p将该像素点替换为一个color,该color采样自一个均匀分布 [ 0 , 1 ] 3 [0,1]^3 [0,1]3;依概率1-p将该像素点维持原样。类似于章节4, L 2 L_2 L2在此实验中不可用,会导致结果向中灰色偏移;与章节4不同,此处没有限制p小于0.5,所以median可能不是正确答案(但是p小于0.5时实验结果不错,作者在原论文中提到了这一点;大于这个阈值则会导致bright和dark向灰色偏移)。故而不能采用 L 1 L_1 L1或者 L 2 L_2 L2 loss进行解答。
作者采用的是annealed version of
L
0
L_0
L0 loss,定义如下:
(
∣
f
θ
(
x
)
−
y
∣
+
ϵ
)
γ
,
(|f_\theta(x)-y|+\epsilon)^\gamma,
(∣fθ(x)−y∣+ϵ)γ,
其中
ϵ
=
1
0
−
8
\epsilon=10^{-8}
ϵ=10−8,
γ
\gamma
γ在训练期间从2到0线性衰退。
在训练时,p随机从 [ 0 , 0.95 ] [0,0.95] [0,0.95]采样。可以看到p可能是一个远大于0.5的值,所以此时如果强行使用 L 1 L_1 L1 loss,如果碰巧p小于0.5(此时median是正确答案),作者发现会获得一个不错的结果;如果大于0.5这个阈值,作者发现图像中bright或者dark的区域会向gray偏移。如果采用 L 2 L_2 L2 loss,作者发现结果会严重向gray偏移,这是因为此时mean是correct answer+mean of uniform random corruption(在章节4中,我们描述过RGB均在平均值的颜色是中灰色,这意味着此处每个像素都会在原来的基础上叠加一个中灰色)。当作者采用 L 0 L_0 L0 loss时,几乎没有偏移,即便是p到达90%(很严重的corruption)。此处作者在原文有相关描述:
L 0 L_0 L0, on the other hand, shows little bias even with extreme corruptions (e.g. 90% pixels), because of all the possible pixel values, the correct answer (e.g. 10%) is still the most common.
(总之在作者的实验中,如果平均数和中位数都不是正确答案时,作者尝试采用了L0 loss,获得了不错的结果。L0 loss的原理博主不太了解,为什么它能够解决L1和L2都不能解决的问题呢?如果读者有相关资料,欢迎在评论区补充。)
不同loss对应的实验结果如下:
可以看到不同的loss会带来不同的效果。本文呈现了N2N中多个loss对结果的不同影响,并通过对部分loss的特性分析,理解了造成这种不同的原因。Noise2Noise是无监督领域的经典大作,它巧用数学为无监督学习打开了一扇大门,欢迎有兴趣的朋友们评论区交流观点、指正本文的不足。
本账号关于无监督图像去噪系列的文章按原计划还有一期,此后将开始涉足AIGC、后端开发等领域,欢迎且感谢交流、关注、批评。




![[corCTF 2022] CoRJail: From Null Byte Overflow To Docker Escape](https://img-blog.csdnimg.cn/direct/afce18a646444accafbb401b0e862271.png#pic_center)