二.方案设计
智慧城市环卫系统主要包括以下几个方面:
1、通过 RFID 实时自动采集功能,自动统计了解各处垃圾桶每天清理情况;
2、GPS 与 DTU 透传相结合,实时掌握保洁及垃圾车辆的工作状态, 行驶路线以及任务完成情况;
3、数据实时采集,自动分析,帮助管理者更好、更科学地管理城市。
2.1 RFID 垃圾清运监管子系统
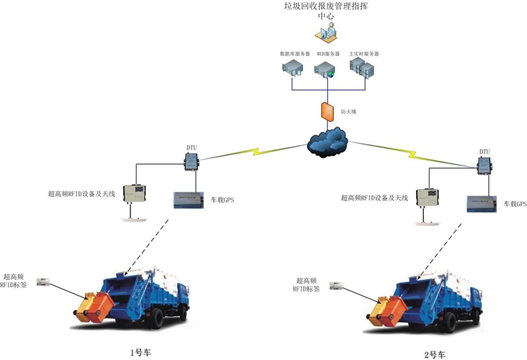
2.1.1 垃圾装卸监管系统
(1)读写器与标签安装
在垃圾车内部安装车载超高频 RFID 设备,车载 RFID 设备包括一台固定式车载RFID设备和一个超高频平板天线组成。在垃圾箱外粘贴上垃圾箱识别超高频 RFID 标签。
(2)工作流程
I.当垃圾车开始装卸垃圾时,车上的超高频 RFID 设备会读到被操作的垃圾箱上的超高频 RFID 标签;
II.RFID 设备识别到此垃圾箱的操作时间和 ID 号后,通过车载DTU 将数据传输给总站服务器,表示该垃圾桶已经清理完成,该垃圾桶的状态就表示今天已经清倒过。
III.在24小时内该垃圾桶状态都是已清理,在总站系统操作界面中显示绿色;超过24 小时后,如果总站服务器未再次收到该垃圾桶的标签数据,就表示该垃圾桶未清倒过,此时垃圾桶的状态就认定为未清倒,并已红色在系统操作界面中表示出来。
这样每个垃圾桶操作的时间和ID信息系统都会有记录。实现了城市垃圾清理工作的数字化管理功能。

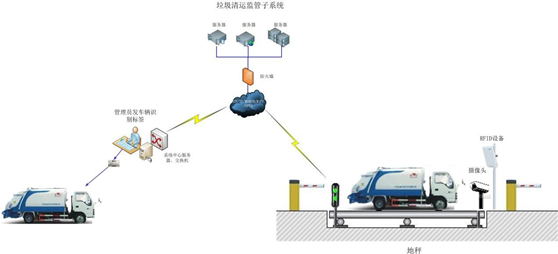
2.2.2 垃圾焚烧作业监管系统
管理员需要在垃圾车上放置车用超高频 RFID车辆标签,标签用来记录车辆的基本信息和工作状态。垃圾车焚烧垃圾前得过地磅称重,在地磅附近安装超高频 RFID 阅读器和摄像头,车辆称重时摄像头抓拍车辆拍照,RFID 设备识别车辆信息,称重完成后RFID 设备对车辆标签写入车辆工作状态代码,代码表示:已称重,准备进入焚烧区。焚烧后车辆离开前 RFID设备再次写入代码,表示该车辆已经作业完成。
2.2 环卫监管子系统
环卫车辆 GPS 监控管理系统主要是通过GPS 技术对环卫车辆进行定位、监控、管理,同时采集环卫车辆的作业状态和油量,根据这些信息,接合 GIS 空间地理信息,进行分析、统计,实现精确化的车辆作业运行管理。
环卫车辆 GPS 监控管理系统是利用 GPS、GSM/GPRS、传感器等技术实时获取环卫车辆的位置、行驶速度、工作状况、油耗油量等信息,在 GIS 电子地图上进行实时监控,并利用 MIS 技术对车辆行驶和作业信息进行统计、分析,实现对环卫车辆的 24 小时动态监控与管理,提高管理效率,提高环卫车辆作业,避免公车私用、不按规定路线和区域作业、盗卖燃油等现象,降低事故发生率,具有显著的社会和经济效益。
环卫车辆 GPS 监控管理系统的总体架构如下图所示。
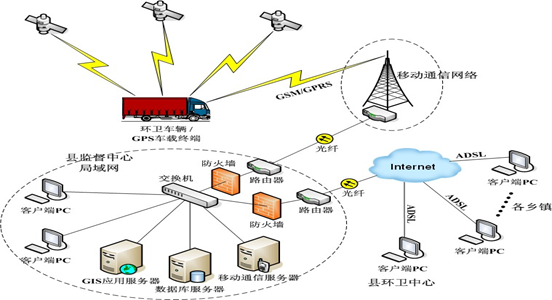
图 2.4 环卫车辆 GPS 监控管理系统架构
2.2.1 洒水车监管子系统
洒水车辆安装 GPS 定位系统,已监管该车的运动路径。同时,在洒水车出水口安装水流感应器,一旦有水流通过就表示洒水车是处于工作状态的。感应器与 DTU 等透传设备相接,实时上传给总站服务器。这样监管中心既可以监管车辆行驶路径,又可以实时查看该车辆是否处于工作状态。
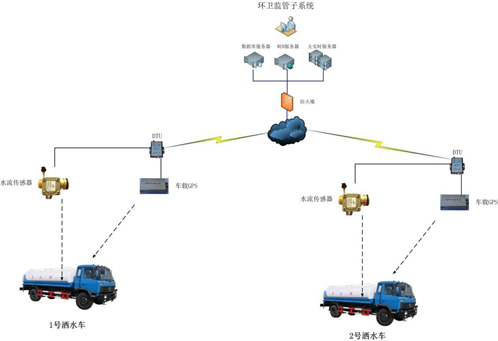
图 2.5 环卫监管子系统---洒水车监管系统拓扑图
2.2.2 清扫车监管子系统
清扫车辆安装 GPS定位系统,已监管该车的运动路径。同时,在清扫车上安装感应器,一旦清扫车启动清扫模式就将该状态通过 DTU 透传到总站服务器上。这样监管中心既可以监管车辆行驶路径,又可以实时查看该车辆是否处于工作状态。
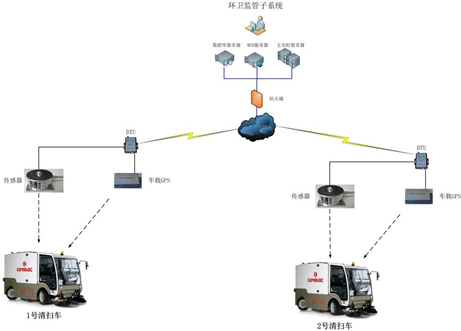
图 2.6 环卫监管子系统---清扫车监管系统拓扑图