相机标定
相机标定的目的有两个。
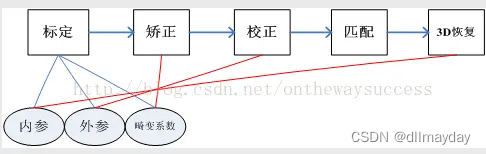
第一,要还原摄像头成像的物体在真实世界的位置就需要知道世界中的物体到计算机图像平面是如何变换的,相机标定的目的之一就是为了搞清楚这种变换关系,求解内外参数矩阵。
第二,摄像机的透视投影有个很大的问题——畸变。摄像头标定的另一个目的就是求解畸变系数,然后用于图像矫正。
一、三大坐标系
谈到相机标定,我们不得不说起摄相机坐标系、世界坐标系、图像坐标系。
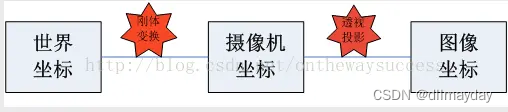
可以看出,世界坐标与图像坐标的关系建立在刚体变换和透视投影变换的基础上。
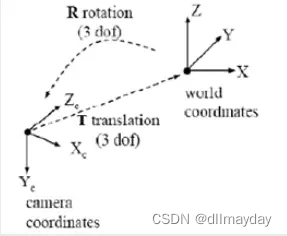
因为世界坐标系和摄像机坐标都是右手坐标系,所以其不会发生形变。我们想把世界坐标系下的坐标转换到摄像机坐标下的坐标,如下图所示,可以通过刚体变换的方式。空间中一个坐标系,总可以通过刚体变换转换到另外一个个坐标系的。
下面看一下,二者之间刚体变换的数学表达:

对应的齐次表达式为:

其中,
R是3×3的正交单位矩阵(即旋转矩阵),
t为平移向量,R、t与摄像机无关,所以称这两个参数为摄像机的外参数(extrinsic parameter),可以理解为两个坐标原点之间的距离,因其受x,y,z三个方向上的分量共同控制,所以其具有三个自由度。
算法参考
https://zhuanlan.zhihu.com/p/572325879
https://zhuanlan.zhihu.com/p/534553717
https://zhuanlan.zhihu.com/p/94244568
https://www.cnblogs.com/zyly/p/9366080.html#_label3
https://zhuanlan.zhihu.com/p/624912264
https://codeantenna.com/a/9aUEL9x37P
https://blog.csdn.net/xm961217/article/details/103767324