一、忽略纵向和横向的影响

如上图所示,车辆以40km/h过减速带时,质心垂向加速度突然变化的同时,纵向加速度与侧向加速度也会引起突变。
我们在之前文章里提到,侧向控制与纵向控制是根据侧向加速度与纵向加速度来做的,因此,过减速带时所引起的这两个加速度,应该把它排除在侧向与纵向控制之外,不让它影响到正常的控制。
二、过减速带时控制策略

如上图所示,蓝线为常电流0.8A (相当于被动减振器)的车辆过减速带时质心垂向加速度,红线为调好参数的天棚算法过减速带的质心垂向加速度,可以看到,经过减速带后,余震偏多,反而是常电流情况下余震少一点。
我们上一篇文章中已经实现实时减速带检测。我们自然而然可以想到,过减速带时用常电流,正常路面时仍旧天棚控制,看下效果。
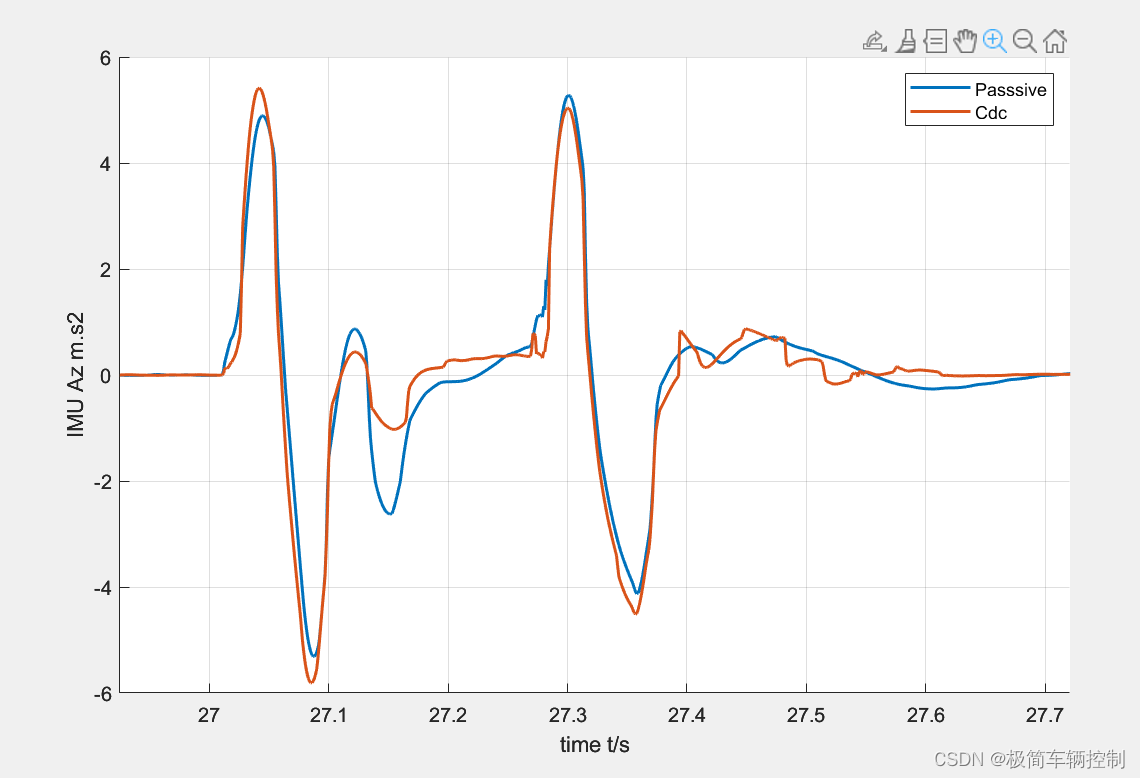
如上图所示,相对于天棚控制的余震不断,采用如下方案:前轴过减速带时前轴电流1.2A,后轴过减速带时电流0.8A以后,余震减少很多,控制效果相对被动减振器也有提高。






![代码随想录算法训练营第二十四天 | 回溯算法理论基础,77. 组合 [回溯篇]](https://img-blog.csdnimg.cn/direct/1193fd9de845464e9dbcca47caf8a462.png)