目录
1.进程创建
1.1fork函数
1.2写时拷贝
2.进程终止
2.1进程退出场景
2.2进程退出方式
3.进程等待
3.1进程等待的必要性
3.2等待方式
3.2.1wait()
3.2.2waitpid()
3.3轮训等待
总结:
1.进程创建
1.1fork函数
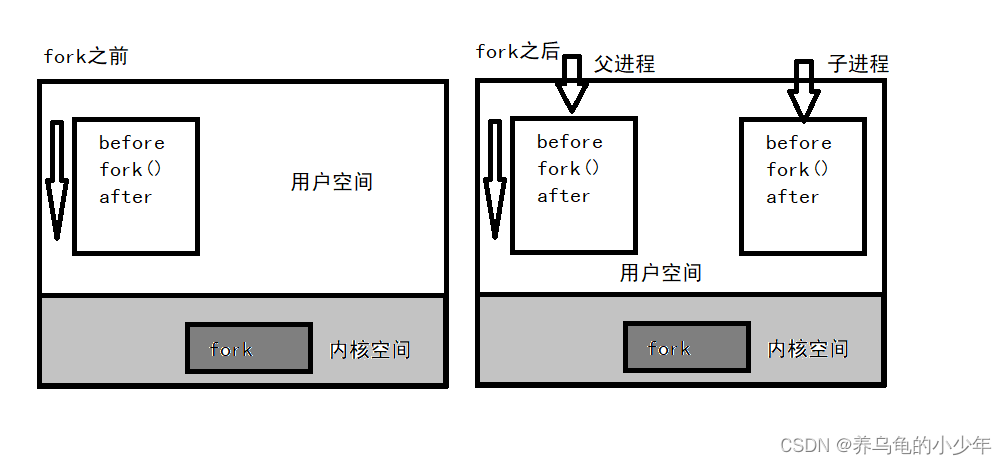
在linux中fork函数时非常重要的函数,它从已存在进程中创建一个新进程。新进程为子进程,而原进程为父进程。
#include <unistd.h>
pid_t fork(void);
返回值:自进程中返回0,父进程返回子进程id,出错返回-1- 分配新的内存块和内核数据结构给子进程
- 将父进程部分数据结构内容拷贝至子进程
- 添加子进程到系统进程列表当中
- fork返回,开始调度器调度
fork 函数返回类型为 pid_t,相当于 typedef int,不过是专门用于进程的,同时它拥有两个返回值:
- 如果进程创建失败,返回
-1 - 进程创建成功后
- 给子进程返回
0 - 给父进程返回子进程的
PID值
- 给子进程返回
int main( void )
{
pid_t pid;
printf("Before: pid is %d\n", getpid());
if ( (pid=fork()) == -1 )perror("fork()"),exit(1);
printf("After:pid is %d, fork return %d\n", getpid(), pid);
sleep(1);
return 0;
}运行结果为:
运行结果:[root@localhost linux]# ./a.outBefore: pid is 43676After:pid is 43676, fork return 43677After:pid is 43677, fork return 0
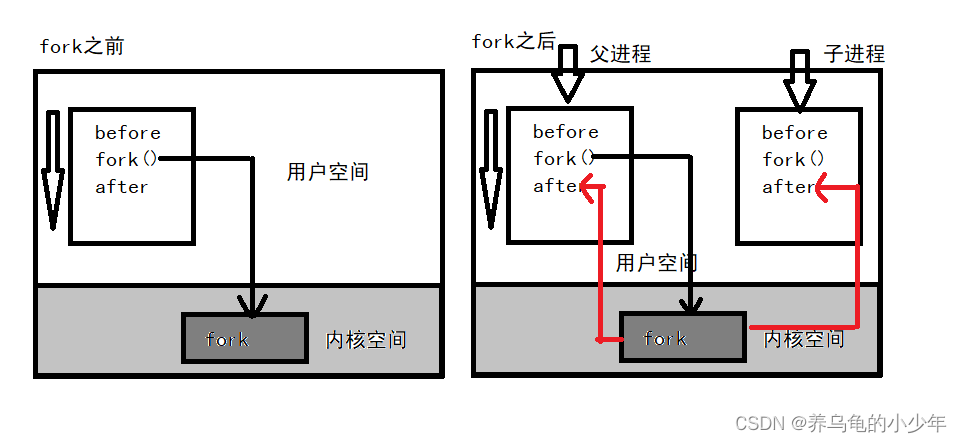
所以,fork之前父进程独立执行,fork之后,父子两个执行流分别执行。注意,fork之后,谁先执行完全由调度器 决定。
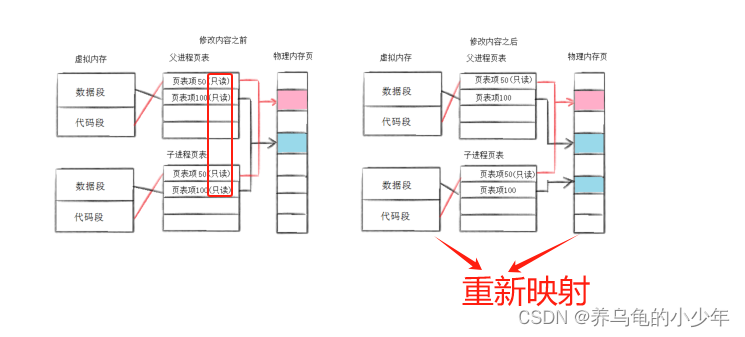
1.2写时拷贝
注意:
- 写时拷贝不止可以发生在常规栈区、堆区,还能发生在只读的数据段和数据段
- 写时拷贝后,生成的是副本,不会对原数据造成影响
2.进程终止
2.1进程退出场景
进程退出场景包含以下三种情况:
- 代码运行完毕,结果正确
- 代码运行完毕,结果不正确
- 代码异常终止
2.2进程退出方式
对一个正在运行中的进程,存在两种终止方式:外部终止和内部终止,外部终止时,通过 kill -9 PID 指令(发信号),强行终止正在运行中的程序,或者通过 ctrl + c 终止前台运行中的程序(快捷键=kill-9)

如果是正常终止的话,可以通过 echo $?查看进程退出码 这个?就是显示最近一次进程运行的退出码,因为echo也是命令行也是进程,所以第二次输出之后就是 0 如下图所示: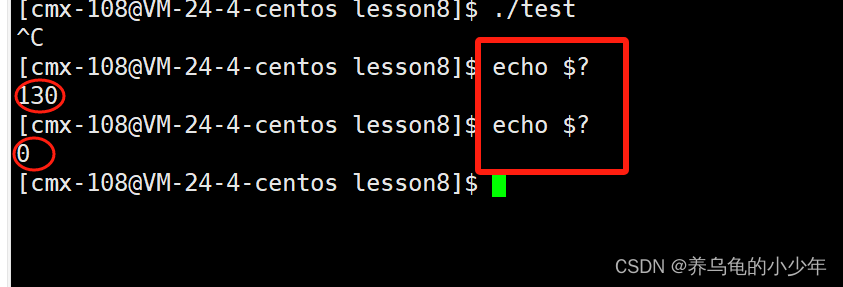
内部终止是通过函数 exit() 或 _exit() 实现的,同时,需要注意的是在我们之前写的main函数中,我们总会在程序执行完之后,写一个 return 0,这个0在进程信息中就代表sucess因为信号都是从1号开始的,在main函数中,return 0和exit(0)代表的含义是一样的 .
我们重点说一下exit()和_exit().
zvoid exit(int status);
void _exit(int status);
这两个退出函数,从本质上来说,没有区别,都是退出进程,但在实际使用时,还是存在一些区别,推荐使用 exit()
比如在下面这段程序中,分别使用 exit() 和 _exit() 观察运行结果
int main()
{
printf("You can see me");
//exit(-1); //退出程序
//_exit(-1); //第二个函数
return 0;
}
使用 exit() 时,输出语句

使用 _exit() 时,输出语句

原因:
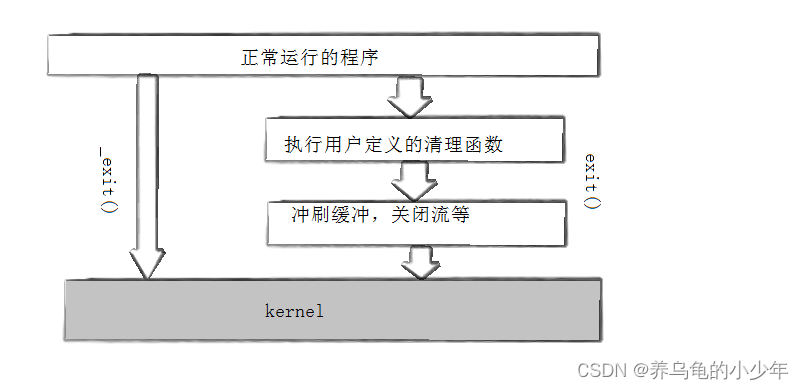
exit()是对_exit()做的封装实现_exit()就只是单纯的退出程序(都要冲刷内核区)- 而
exit()在退出之前还会做一些事,比如冲刷缓冲区,再调用_exit() - 程序中输出语句位于输出缓冲区,不冲刷的话,是不会输出内容的
3.进程等待
3.1进程等待的必要性
- 之前讲过,子进程退出,父进程如果不管不顾,就可能造成‘僵尸进程’的问题,进而造成内存泄。
- 另外,进程一旦变成僵尸状态,那就刀枪不入,“杀人不眨眼”的kill -9 也无能为力,因为谁也没有办法 杀死一个已经死去的进程。
- 最后,父进程派给子进程的任务完成的如何,我们需要知道。如,子进程运行完成,结果对还是不对, 或者是否正常退出。
- 父进程通过进程等待的方式,回收子进程资源,获取子进程退出信息
3.2等待方式
#include <sys/types.h>
#include <sys/wait.h>
pid_t wait(int* status);
pid_t waitpid(pid_t pid, int* status, int options);
3.2.1wait()
wait()函数,之前有介绍过,没有说过形参status,因为接下来介绍的waitpid()包含退出状态status所以会在下面介绍
3.2.2waitpid()
返回值:
等待成功时,返回 >0 的值
等待失败时,返回 -1
等待中,返回 0
参数列表:
pid 表示所等子进程的 PID
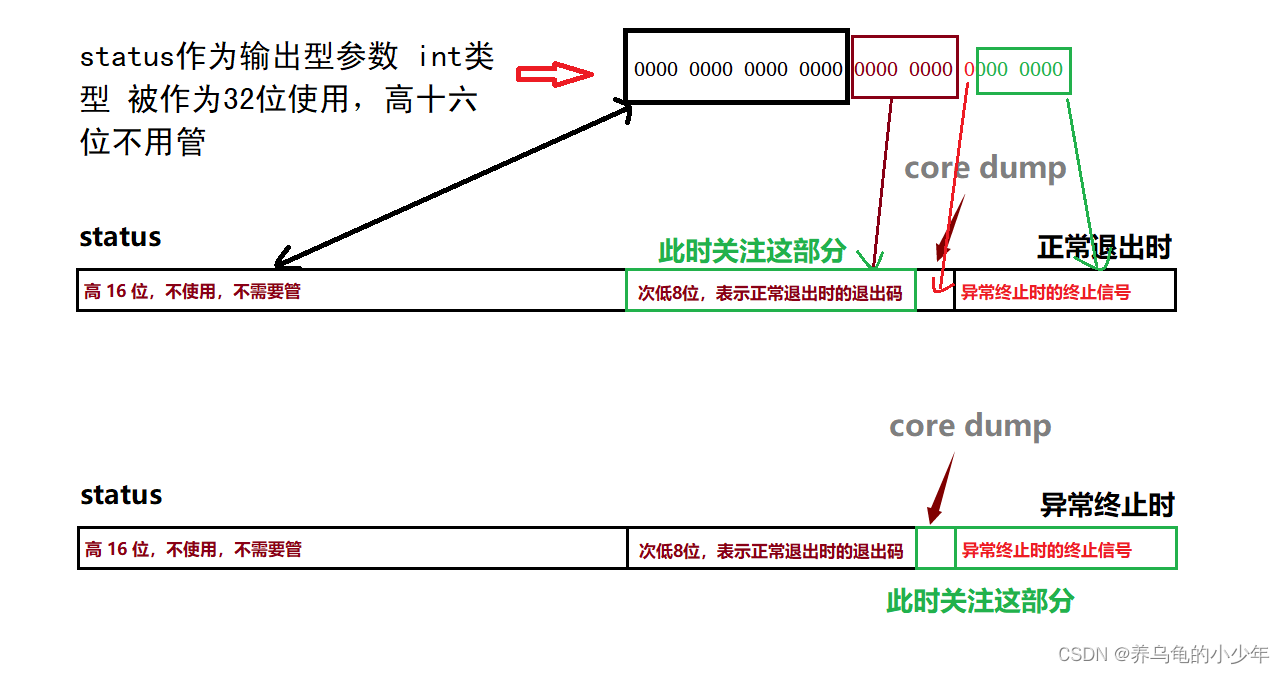
status 表示状态,为整型,其中高 16 位不管,低 16 位中,次低 8 位表示退出码,第 7 位表示 core dump,低 7 位表示终止信号
options 为选项,比如可以选择父进程是否需要阻塞等待子进程退出,默认为0就是阻塞等待还有轮训等待。
status
下面通过代码演示:
int main()
{
//演示 waitpid()
pid_t id = fork(); //创建子进程
if(id == 0)
{
int time = 5;
int n = 0;
while(n < time)
{
printf("我是子进程,我已经运行了:%d秒 PID:%d PPID:%d\n", n + 1, getpid(), getppid());
sleep(1);
n++;
}
exit(5); //子进程退出
}
int status = 0; //状态
pid_t ret = waitpid(id, &status, 0); //参数3 为0,为默认选项
if(ret == -1)
{
printf("进程等待失败!进程不存在!\n");
}
else if(ret == 0)
{
printf("子进程还在运行中!\n");
}
else
{
printf("进程等待成功,子进程已被回收\n");
}
printf("我是父进程, PID:%d PPID:%d\n", getpid(), getppid());
//通过 status 判断子进程运行情况
if((status & 0x7F))
{
printf("子进程异常退出,core dump:%d 退出信号:%d\n", (status >> 7) & 1, (status & 0x7F));
}
else
{
printf("子进程正常退出,退出码:%d\n", (status >> 8) & 0xFF);
}
return 0;
}
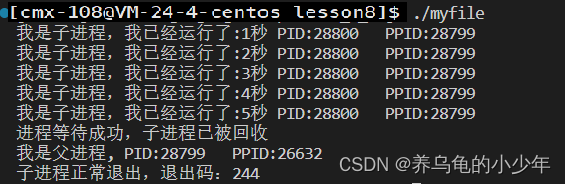
不发出终止信号,让程序自然跑完
发出终止信号,强行终止进程
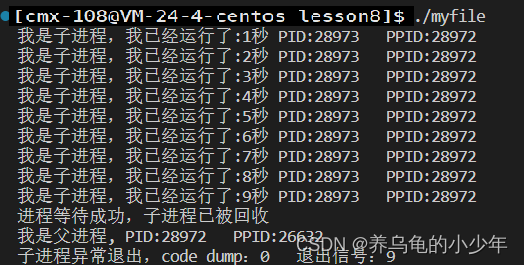
waitpid() 的返回值可以帮助我们判断此时进程属于什么状态(在下一份测试代码中表现更明显),而 status 的不同部分,可以帮助我们判断子进程因何而终止,并获取 退出码(终止信号)
在进程的
PCB中,包含了int _exit_code和int _exit_signal这两个信息,可以通过对status的位操作间接获取其中的值,同时,在子进程结束,代码和数据会释放,同时会将自己的退出码,退出信息防止在pcb中,等待父进程回收。
注意:
如果觉得 (status >> 8) & 0xFF 和 (status & 0x7F) 这两个位运算难记,系统还提供了两个宏来简化代码
WIFEXITED(status) 判断进程退出情况,当宏为真时,表示进程正常退出
WEXITSTATUS(status) 相当于 (status >> 8) & 0xFF,直接获取退出码
3.3轮训等待
我们介绍一下,waitpid的第三个参数 options
//options 参数
WNOHANG
//比如
waitpid(id, &status, WNOHANG);
父进程并非需要一直等待子进程运行结束(阻塞等待),可以通过设置 options 参数,进程解除 夯 状态,父进程变成 等待轮询 状态,不断获取子进程状态(是否退出),如果没退出,就可以干点其他事
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h> //进程等待相关函数头文件
int main()
{
//演示 waitpid()
pid_t id = fork(); //创建子进程
if(id == 0)
{
int time = 9;
int n = 0;
while(n < time)
{
printf("我是子进程,我已经运行了:%d秒 PID:%d PPID:%d\n", n + 1, getpid(), getppid());
sleep(1);
n++;
}
exit(244); //子进程退出
}
int status = 0; //状态
pid_t ret = 0;
while(1)
{
ret = waitpid(id, &status, WNOHANG); //参数3 设置为非阻塞状态
if(ret == -1)
{
printf("进程等待失败!进程不存在!\n");
break;
}
else if(ret == 0)
{
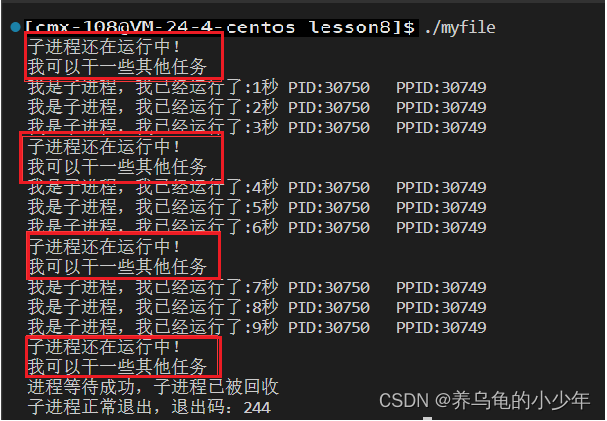
printf("子进程还在运行中!\n");
printf("我可以干一些其他任务\n");
sleep(3);
}
else
{
printf("进程等待成功,子进程已被回收\n");
//通过 status 判断子进程运行情况
if(WIFEXITED(status))
{
printf("子进程正常退出,退出码:%d\n", WEXITSTATUS(status));
break;
}
else
{
printf("子进程异常退出,code dump:%d 退出信号:%d\n", (status >> 7) & 1, (status & 0x7F));
break;
}
}
}
return 0;
}
程序正常运行,父进程通过 等待轮询 的方式,在子进程执行的同时,执行其他任务
注意: 如果不写进程等待函数,会引发僵尸进程问题
总结:
进程还有进程替换,因为内容比较多,我放在下一章梳理。以上就是关于 Linux进程控制(创建、终止、等待) 的相关知识了,我们学习了 子进程 是如何被创建的,创建后又是如何终止的,以及 子进程 终止 父进程 需要做些什么,有了这些知识后,在对 进程 进行操作时能更加灵活和全面 。