Cake
题意
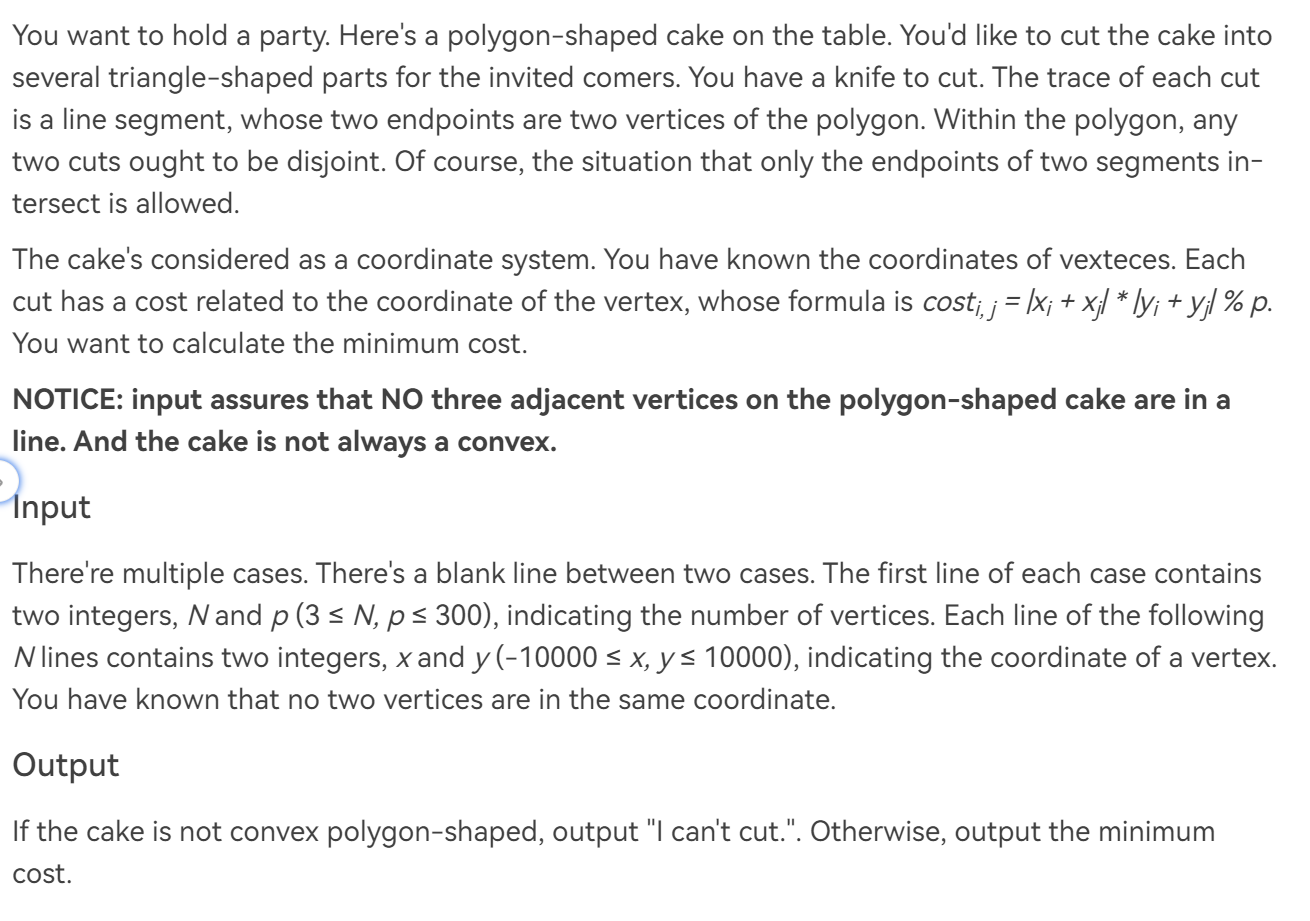
给定平面坐标上的 n n n 个点,如果是凸多边形的话,就用最少的花费把这个多边形剖分成若干个三角形,剖分的线段端点只能是原多边形的顶点,一条线段的花费为: ∣ x i + x j ∣ × ∣ y i + y j ∣ m o d p |x_i + x_j| \times |y _i + y_j| mod p ∣xi+xj∣×∣yi+yj∣modp
思路
首先我们使用 A n d r e w Andrew Andrew 算法判断一下是否为凸包。对于当前的顶点 [ 0 , n − 1 ] [0, n - 1] [0,n−1],我们先看一条边: 0 ↔ n − 1 0 \lrarr n - 1 0↔n−1,这条边肯定属于某个三角形,我们肯定要有一条线的端点之一是 0 0 0,另外一条线的端点之一是 n − 1 n - 1 n−1,并且这两条线有一个公共端点 k ( 1 ≤ k ≤ n − 2 ) k(1 \leq k \leq n - 2) k(1≤k≤n−2),因为只有这样,才能将这条边剖分成属于某个三角形,而那两条线段就是三角形的两条边,第三条边就是 0 ↔ n − 1 0 \lrarr n - 1 0↔n−1
那么这两条线就将我们的 [ 0 , n − 1 ] [0, n - 1] [0,n−1] 区间的端点分成了两个部分: [ 0 , k ] [0, k] [0,k] 和 [ k + 1 , n − 1 ] [k + 1, n - 1] [k+1,n−1],这是两个子状态,我们可以使用 d p [ l ] [ r ] dp[l][r] dp[l][r] 表示区间 [ l , r ] [l,r] [l,r] 的三角剖分的最小花费
那么转移就可以枚举区间的分裂点 k k k
- d p [ l ] [ k ] = m i n l + 1 ≤ k ≤ r − 1 ( d p [ l ] [ k ] + d p [ k + 1 ] [ r ] + c o s t ( l , k ) + c o s t ( k , r ) ) dp[l][k] = min_{l + 1 \leq k \leq r - 1} (dp[l][k] + dp[k + 1][r] + cost(l, k) + cost(k, r)) dp[l][k]=minl+1≤k≤r−1(dp[l][k]+dp[k+1][r]+cost(l,k)+cost(k,r)), c o s t ( l , k ) cost(l,k) cost(l,k) 表示连接 l l l 和 k k k 的花费
注意如果 l + 1 ≤ r l + 1 \leq r l+1≤r 时, c o s t ( l , r ) = 0 cost(l, r) = 0 cost(l,r)=0,因为原本的多边形上已经有了这条边,不用而外花费去切割
跑区间 D P DP DP 的时候,我们从长度为 3 3 3 的区间开始,长度小于等于 2 2 2 的区间花费都为 0 0 0,都不用切割
时间复杂度: O ( n 3 ) O(n^3) O(n3)
#include<bits/stdc++.h>
#define fore(i,l,r) for(int i=(int)(l);i<(int)(r);++i)
#define fi first
#define se second
#define endl '\n'
#define ull unsigned long long
#define ALL(v) v.begin(), v.end()
#define Debug(x, ed) std::cerr << #x << " = " << x << ed;
const int INF=0x3f3f3f3f;
const long long INFLL=1e18;
typedef long long ll;
int mod;
struct Point{
int x,y;
Point(int xx=0,int yy=0){x=xx,y=yy;}
Point operator + (Point B){ //向量 +
return Point(x+B.x,y+B.y);
}
Point operator - (Point B){ //向量 -
return Point(x-B.x,y-B.y);
}
Point operator * (int k){ //向量等比例放大
return Point(k*x,k*y);
}
bool operator == (Point B){ //unique 用到
return x-B.x == 0 && y-B.y == 0;
}
bool operator < (Point B){
return x-B.x < 0 || (x-B.x == 0 && y-B.y < 0);
}
};
int Cross(Point A,Point B){
return A.x*B.y - A.y*B.x;
}
int Convex_hull(Point* p,int n,Point* ch){ //ch[]储存凸包顶点
n = std::unique(p,p+n) - p; //去重
std::sort(p,p+n); //排序
int v = 0;
/* 求下凸包 */
fore(i,0,n){
while(v>1 && Cross(ch[v-1]-ch[v-2],p[i]-ch[v-2]) <= 0)
--v;
ch[v++] = p[i];
}
int j = v;
/* 求上凸包 */
for(int i=n-2;i>=0;--i){
while(v>j && Cross(ch[v-1]-ch[v-2],p[i]-ch[v-2]) <= 0)
--v;
ch[v++] = p[i];
}
if(n>1) --v; //p[0]被加入了两次
return v; //返回凸包顶点数
}
Point p[500];
Point ch[500];
int main(){
std::ios::sync_with_stdio(false);
std::cin.tie(nullptr);
std::cout.tie(nullptr);
int n;
while(std::cin >> n >> mod){
fore(i, 0, n) std::cin >> p[i].x >> p[i].y;
if(Convex_hull(p, n, ch) < n){ //不是凸包
std::cout << "I can't cut.\n";
continue;
}
if(n <= 3){
std::cout << "0\n";
continue;
}
std::vector<std::vector<int>> dp(n + 5, std::vector<int>(n + 5, INF));
std::vector<std::vector<int>> dis(n + 5, std::vector<int>(n + 5, 0)); //连接两个顶点的cost
auto cal = [&](int i, int j) { //计算cost
return std::abs(ch[i].x + ch[j].x) * std::abs(ch[i].y + ch[j].y) % mod;
};
fore(i, 0, n)
fore(j, i + 2, n)
dis[i][j] = dis[j][i] = cal(i, j); //预计算cost
fore(i, 0, n) dp[i][i + 1] = 0;
fore(len, 3, n + 1)
fore(L, 0, n - len + 1){
int R = L + len - 1;
fore(k, L + 1, R)
dp[L][R] = std::min(dp[L][R], dp[L][k] + dp[k][R] + dis[L][k] + dis[k][R]);
}
std::cout << dp[0][n - 1] << endl;
}
return 0;
}