主要任务应用
1.管线巡查
挂载可见光/红外二合一光电载荷和小型SAR设备,对既定线路进行昼夜巡视侦察,利用图像实时传回指挥控制中心,可用于石油管路、电力线路、舰艇航线及周围态势感知,利于依据现场实情进行战略决策和指令传达。

2.应急测绘
挂载测绘相机和小型SAR雷达,利用垂直起降无人机的机动灵活性,对突发险情进行应急测绘,及时获取灾区的影像数据,为救灾部署和灾后重建工作的开展起到至关重要的作用。
3.海洋监测
挂载高光谱相机和光电吊舱,对海洋保护区、入海河流、排污口、养殖区等海域进行水色和高光谱监测,对重点海岛、砂质岸线、大规模围填海和近海开发利用的活动进行高清影像监测,增强海洋环境监测能力。
4.农林防护
挂载制冷型红外热像仪和高清可见光光电吊舱,对大面积森林植被进行大视场广域监测,制冷型红外热像仪的测温精度达到0.5℃,能够有效监控火源隐患,一旦发生灾情可及时向指挥中心实时回报受灾情况。
挂载高光谱相机或测绘相机,对森林植被进行覆盖率分析、健康监测、森林储积量评估等;针对特定农作物确定种植面积、生长状况、生长阶段和产值预估等。
5.地理环境监测
挂载高光谱相机或激光雷达,对海岸带或关注区域开展地理环境监测应用,包括土地利用覆盖、土壤质量、植被、海岸线、水色、水下地形及灾害等。
任务目标
负重20kg级复合翼垂直起降无人机系统主要应用于民用领域,设计巡航高度1km,巡航速度不低于100km/h,能够满足根据任务载荷挂装需求(标准挂载10-15kg,最大20kg),挂载15kg载荷条件下续航时间不低于5h,要求系统全寿命周期成本低、使用维护简捷、存储空间小。
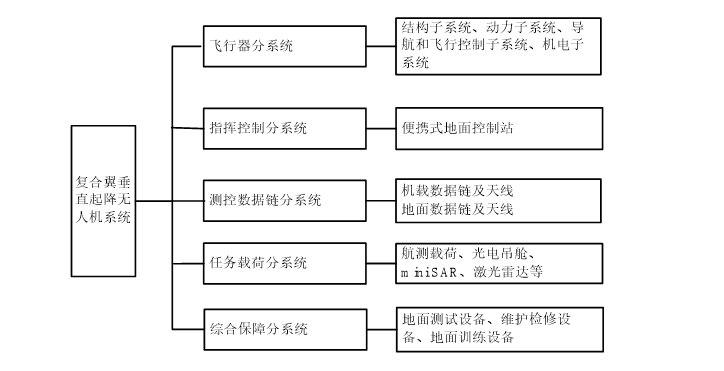
系统组成与系统配置
复合翼垂直起降无人机系统组成如图所示。
工作原理
100kg级复合翼垂直起降无人机系统是具有GPS 导航、自动测姿测速、远程数控功能的应用系统。系统利用复合式无人机飞行平台,可在多旋翼模态垂直起降和固定翼模态下平飞巡航,满足任务需求的同时起降灵活、使用方便。
飞行模式
飞行模式分为指令程控飞行、自主导航飞行和人工遥控飞行三种形式。指令程控即通过上行遥控指令,人工控制无人机纵向通道的爬升、下滑或平飞运动模式,无人机横侧向通道的转弯或直线运动,还可以控制发动机的不同工作状态。在指令程控方式下,可随时响应纵/横向飞行模态指令。通过导航+点号切入指令,还可使无人机的导航方式从指令程控切入自主导航。
自主导航飞行为无人机的主要导航方式。在自主导航下,无人机能够根据预先设置的航线进行飞行,不需要地面操纵员的干预。最主要的特点是,在自主导航下可以将飞行航线与飞行任务有机地结合起来,从而使飞行任务的执行效率和自动化程度大大增强。并可通过复原指令,使无人机从自主导航切换到指令程控的导航方式。
人工遥控飞行是利用操控手柄直接进行无人机的飞行操作,主要用于视距内特殊情况下的操作飞行,人工遥控飞行和自主导航飞行模式可随时切换。
材料与结构
复合翼无人机的材料和结构通常采用高质量的碳纤维材料和先进的制造工艺,以确保其坚固耐用、轻便且具有很高的强度重量比。这有助于提高无人机的性能和寿命,并减少维护成本。
经济性及维护
复合翼无人机的经济性和维护成本相对较低。由于其采用模块化设计和高可靠性组件,维护和修理成本通常较低。此外,其较低的能耗和维护需求也有助于降低运营成本。

紧急状况处理
飞行器控制系统设置紧急情况处理控制模式,包含失控应急飞行模式、无导航信息应急返航、着陆应急助推控制等三种模式。失控应急飞行模式主要针对无人机在遥控方式飞行时,数据链路中断后飞行器按照预设航线实施自主飞行;
无导航信息应急返航控制主要指无人机在任务执行过程中,主GPS信息丢失后,自动切换至备份GPS信号源,若双GPS皆无导航信息,无人机通过惯导系统进行导航以保持预设航线飞行60s,如果未能恢复GPS信号则无人机爬高以便能恢复信号;如仍未能恢复GPS导航,则无人机依据视频图像应急着陆;
着陆应急助推控制主要是指无人机因风速过大导致无法悬停并前飞至着陆点的情况下,自动根据判定条件增大尾推发动机油门,提高前向推力,使无人机移动至降落点并着陆。