电子模块|光照强度传感器模块 GY-302及其驱动(arduino、STC51、STM32)
- 实物照片
- 模块简介
- 模块特点
- 原理图
- 驱动程序
- arduino
- STC51
- STM32
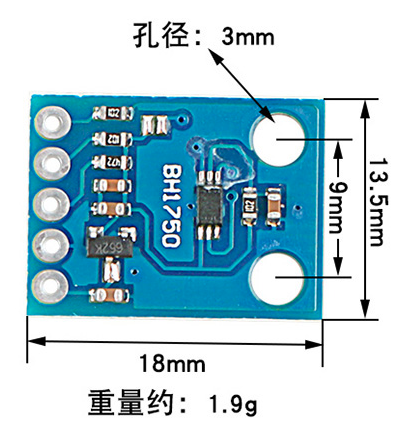
实物照片
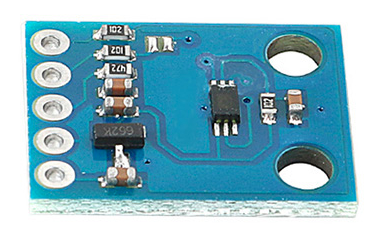
模块简介
BH1750是一种用于两线式串行总线接口的数字型光强度传感器集成电路。这种集成电路可以根据收集的光线强度数据来调整液晶或者键盘背景灯的亮度。利用它的高分辨率可以探测较大范围的光强度变化。BH1750的内部由光敏二极管、运算放大器、ADC采集、晶振等组成。对应广泛的输入光范围(相当于1-65535lx),最小误差变动在土20%,而且受红外线影响很小。
模块参数:
| 型号 | GY-302 |
|---|---|
| 功能 | 测量光照强度 |
| 尺寸 | 13.9mm X 18.5mm |
| 供电电源 | 3-5v |
| 数据范围 | 0-65535 |
尺寸照片
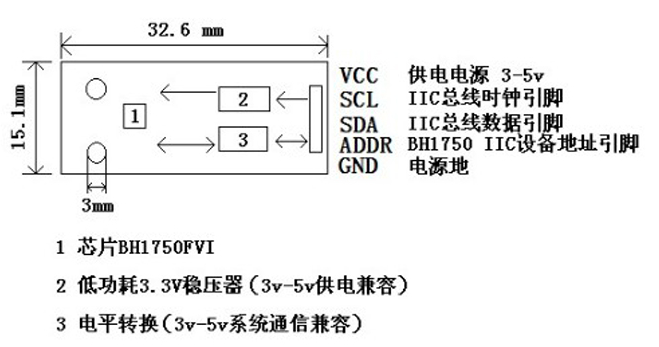
模块特点
- 采用ROHM原装BH1750FVI芯片
- 供电电源:3-5v
- 光照度范围:0-65535 lx
- 传感器内置16bitAD转换器
- 直接数字输出,省略复杂的计算,省略标定,不区分环境光源接近与视觉灵敏度的分光特性,可对广泛的亮度进行1勒克斯的高精度测定。
- 标准NXP IIC通信协议
- 模块内部包含通信电平转换,与5v单片机io直接连接。
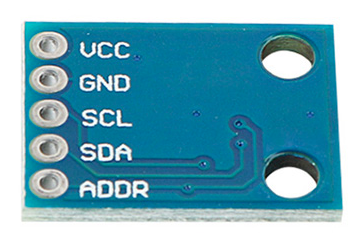
原理图
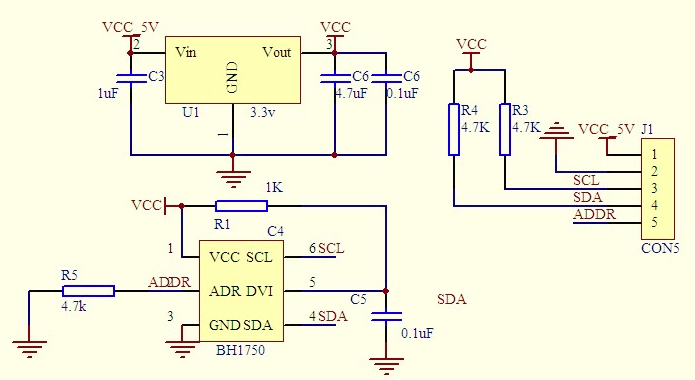
| 名称 | 注释 |
|---|---|
| GND | 电源地 |
| VCC | 电源(3.3v~5v) |
| SCL | 时钟线 |
| SDA | 数据线 |
| ADDR | 设备地址引脚 |
引脚示意图
驱动程序
arduino
#include <Wire.h> //IIC
#include <math.h>
int BH1750address = 0x23;
byte buff[2];
void setup()
{
Wire.begin();
Serial.begin(9600);
}
void loop()
{
int i;
uint16_t val=0;
BH1750_Init(BH1750address);
delay(200);
if(2==BH1750_Read(BH1750address))
{
val=((buff[0]<<8)|buff[1])/1.2;
Serial.print(val,DEC);
Serial.println("[lx]");
}
delay(150);
}
int BH1750_Read(int address) //
{
int i=0;
Wire.beginTransmission(address);
Wire.requestFrom(address, 2);
while(Wire.available()) //
{
buff[i] = Wire.receive(); // receive one byte
i++;
}
Wire.endTransmission();
return i;
}
void BH1750_Init(int address)
{
Wire.beginTransmission(address);
Wire.send(0x10);//1lx reolution 120ms
Wire.endTransmission();
}
STC51
#include <REG51.H>
#include <math.h> //Keil library
#include <stdio.h> //Keil library
#include <INTRINS.H>
#define uchar unsigned char
#define uint unsigned int
#define DataPort P0 //LCD1602数据端口
sbit SCL=P1^0; //IIC时钟引脚定义
sbit SDA=P1^1; //IIC数据引脚定义
sbit LCM_RS=P2^0; //LCD1602命令端口
sbit LCM_RW=P2^1; //LCD1602命令端口
sbit LCM_EN=P2^2; //LCD1602命令端口
#define SlaveAddress 0x46 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改
//ALT ADDRESS引脚接地时地址为0x46,接电源时地址为0xB8
typedef unsigned char BYTE;
typedef unsigned short WORD;
BYTE BUF[8]; //接收数据缓存区
uchar ge,shi,bai,qian,wan; //显示变量
int dis_data; //变量
void delay_nms(unsigned int k);
void InitLcd();
void Init_BH1750(void);
void WriteDataLCM(uchar dataW);
void WriteCommandLCM(uchar CMD,uchar Attribc);
void DisplayOneChar(uchar X,uchar Y,uchar DData);
void conversion(uint temp_data);
void Single_Write_BH1750(uchar REG_Address); //单个写入数据
uchar Single_Read_BH1750(uchar REG_Address); //单个读取内部寄存器数据
void Multiple_Read_BH1750(); //连续的读取内部寄存器数据
//------------------------------------
void Delay5us();
void Delay5ms();
void BH1750_Start(); //起始信号
void BH1750_Stop(); //停止信号
void BH1750_SendACK(bit ack); //应答ACK
bit BH1750_RecvACK(); //读ack
void BH1750_SendByte(BYTE dat); //IIC单个字节写
BYTE BH1750_RecvByte(); //IIC单个字节读
//-----------------------------------
//*********************************************************
void conversion(uint temp_data) // 数据转换出 个,十,百,千,万
{
wan=temp_data/10000+0x30 ;
temp_data=temp_data%10000; //取余运算
qian=temp_data/1000+0x30 ;
temp_data=temp_data%1000; //取余运算
bai=temp_data/100+0x30 ;
temp_data=temp_data%100; //取余运算
shi=temp_data/10+0x30 ;
temp_data=temp_data%10; //取余运算
ge=temp_data+0x30;
}
//毫秒延时**************************
void delay_nms(unsigned int k)
{
unsigned int i,j;
for(i=0;i<k;i++)
{
for(j=0;j<121;j++)
{;}}
}
/*******************************/
void WaitForEnable(void)
{
DataPort=0xff;
LCM_RS=0;LCM_RW=1;_nop_();
LCM_EN=1;_nop_();_nop_();
while(DataPort&0x80);
LCM_EN=0;
}
/*******************************/
void WriteCommandLCM(uchar CMD,uchar Attribc)
{
if(Attribc)WaitForEnable();
LCM_RS=0;LCM_RW=0;_nop_();
DataPort=CMD;_nop_();
LCM_EN=1;_nop_();_nop_();LCM_EN=0;
}
/*******************************/
void WriteDataLCM(uchar dataW)
{
WaitForEnable();
LCM_RS=1;LCM_RW=0;_nop_();
DataPort=dataW;_nop_();
LCM_EN=1;_nop_();_nop_();LCM_EN=0;
}
/***********************************/
void InitLcd()
{
WriteCommandLCM(0x38,1);
WriteCommandLCM(0x08,1);
WriteCommandLCM(0x01,1);
WriteCommandLCM(0x06,1);
WriteCommandLCM(0x0c,1);
}
/***********************************/
void DisplayOneChar(uchar X,uchar Y,uchar DData)
{
Y&=1;
X&=15;
if(Y)X|=0x40;
X|=0x80;
WriteCommandLCM(X,0);
WriteDataLCM(DData);
}
/**************************************
延时5微秒(STC90C52RC@12M)
不同的工作环境,需要调整此函数,注意时钟过快时需要修改
当改用1T的MCU时,请调整此延时函数
**************************************/
void Delay5us()
{
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
}
/**************************************
延时5毫秒(STC90C52RC@12M)
不同的工作环境,需要调整此函数
当改用1T的MCU时,请调整此延时函数
**************************************/
void Delay5ms()
{
WORD n = 560;
while (n--);
}
/**************************************
起始信号
**************************************/
void BH1750_Start()
{
SDA = 1; //拉高数据线
SCL = 1; //拉高时钟线
Delay5us(); //延时
SDA = 0; //产生下降沿
Delay5us(); //延时
SCL = 0; //拉低时钟线
}
/**************************************
停止信号
**************************************/
void BH1750_Stop()
{
SDA = 0; //拉低数据线
SCL = 1; //拉高时钟线
Delay5us(); //延时
SDA = 1; //产生上升沿
Delay5us(); //延时
}
/**************************************
发送应答信号
入口参数:ack (0:ACK 1:NAK)
**************************************/
void BH1750_SendACK(bit ack)
{
SDA = ack; //写应答信号
SCL = 1; //拉高时钟线
Delay5us(); //延时
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
/**************************************
接收应答信号
**************************************/
bit BH1750_RecvACK()
{
SCL = 1; //拉高时钟线
Delay5us(); //延时
CY = SDA; //读应答信号
SCL = 0; //拉低时钟线
Delay5us(); //延时
return CY;
}
/**************************************
向IIC总线发送一个字节数据
**************************************/
void BH1750_SendByte(BYTE dat)
{
BYTE i;
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1; //移出数据的最高位
SDA = CY; //送数据口
SCL = 1; //拉高时钟线
Delay5us(); //延时
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
BH1750_RecvACK();
}
/**************************************
从IIC总线接收一个字节数据
**************************************/
BYTE BH1750_RecvByte()
{
BYTE i;
BYTE dat = 0;
SDA = 1; //使能内部上拉,准备读取数据,
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1;
SCL = 1; //拉高时钟线
Delay5us(); //延时
dat |= SDA; //读数据
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
return dat;
}
//*********************************
void Single_Write_BH1750(uchar REG_Address)
{
BH1750_Start(); //起始信号
BH1750_SendByte(SlaveAddress); //发送设备地址+写信号
BH1750_SendByte(REG_Address); //内部寄存器地址,
// BH1750_SendByte(REG_data); //内部寄存器数据,
BH1750_Stop(); //发送停止信号
}
//********单字节读取*****************************************
/*
uchar Single_Read_BH1750(uchar REG_Address)
{ uchar REG_data;
BH1750_Start(); //起始信号
BH1750_SendByte(SlaveAddress); //发送设备地址+写信号
BH1750_SendByte(REG_Address); //发送存储单元地址,从0开始
BH1750_Start(); //起始信号
BH1750_SendByte(SlaveAddress+1); //发送设备地址+读信号
REG_data=BH1750_RecvByte(); //读出寄存器数据
BH1750_SendACK(1);
BH1750_Stop(); //停止信号
return REG_data;
}
*/
//*********************************************************
//
//连续读出BH1750内部数据
//
//*********************************************************
void Multiple_read_BH1750(void)
{ uchar i;
BH1750_Start(); //起始信号
BH1750_SendByte(SlaveAddress+1); //发送设备地址+读信号
for (i=0; i<3; i++) //连续读取2个地址数据,存储中BUF
{
BUF[i] = BH1750_RecvByte(); //BUF[0]存储0x32地址中的数据
if (i == 3)
{
BH1750_SendACK(1); //最后一个数据需要回NOACK
}
else
{
BH1750_SendACK(0); //回应ACK
}
}
BH1750_Stop(); //停止信号
Delay5ms();
}
//初始化BH1750,根据需要请参考pdf进行修改****
void Init_BH1750()
{
Single_Write_BH1750(0x01);
}
//*********************************************************
//主程序********
//*********************************************************
void main()
{
float temp;
delay_nms(100); //延时100ms
InitLcd(); //初始化LCD
Init_BH1750(); //初始化BH1750
while(1) //循环
{
Single_Write_BH1750(0x01); // power on
Single_Write_BH1750(0x10); // H- resolution mode
delay_nms(180); //延时180ms
Multiple_Read_BH1750(); //连续读出数据,存储在BUF中
dis_data=BUF[0];
dis_data=(dis_data<<8)+BUF[1];//合成数据,即光照数据
temp=(float)dis_data/1.2;
conversion(temp); //计算数据和显示
DisplayOneChar(0,0,'L');
DisplayOneChar(1,0,'i');
DisplayOneChar(2,0,'g');
DisplayOneChar(3,0,'h');
DisplayOneChar(4,0,'t');
DisplayOneChar(5,0,':');
DisplayOneChar(7,0,wan); //显示数据
DisplayOneChar(8,0,qian);
DisplayOneChar(9,0,bai);
DisplayOneChar(10,0,shi);
DisplayOneChar(11,0,ge);
DisplayOneChar(13,0,'l'); 显示数单位
DisplayOneChar(14,0,'x');
}
}
STM32
C文件
#include "bh1750.h"
#include "sys.h"
/*
应用说明:
在访问I2C设备前,请先调用 i2c_CheckDevice() 检测I2C设备是否正常,该函数会配置GPIO
*/
static void I2C_BH1750_GPIOConfig(void);
/*
*********************************************************************************************************
* 函 数 名: i2c_Delay
* 功能说明: I2C总线位延迟,最快400KHz
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
static void i2c_Delay(void)
{
uint8_t i;
/*
下面的时间是通过逻辑分析仪测试得到的。
工作条件:CPU主频72MHz ,MDK编译环境,1级优化
循环次数为10时,SCL频率 = 205KHz
循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us
循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us
*/
for (i = 0; i < 10; i++);
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线启动信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Start(void)
{
/* 当SCL高电平时,SDA出现一个下跳沿表示I2C总线启动信号 */
BH1750_I2C_SDA_1();
BH1750_I2C_SCL_1();
i2c_Delay();
BH1750_I2C_SDA_0();
i2c_Delay();
BH1750_I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线停止信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Stop(void)
{
/* 当SCL高电平时,SDA出现一个上跳沿表示I2C总线停止信号 */
BH1750_I2C_SDA_0();
BH1750_I2C_SCL_1();
i2c_Delay();
BH1750_I2C_SDA_1();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_SendByte
* 功能说明: CPU向I2C总线设备发送8bit数据
* 形 参:_ucByte : 等待发送的字节
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_SendByte(uint8_t _ucByte)
{
uint8_t i;
/* 先发送字节的高位bit7 */
for (i = 0; i < 8; i++)
{
if (_ucByte & 0x80)
{
BH1750_I2C_SDA_1();
}
else
{
BH1750_I2C_SDA_0();
}
i2c_Delay();
BH1750_I2C_SCL_1();
i2c_Delay();
BH1750_I2C_SCL_0();
if (i == 7)
{
BH1750_I2C_SDA_1(); // 释放总线
}
_ucByte <<= 1; /* 左移一个bit */
i2c_Delay();
}
}
/*
*********************************************************************************************************
* 函 数 名: i2c_ReadByte
* 功能说明: CPU从I2C总线设备读取8bit数据
* 形 参:无
* 返 回 值: 读到的数据
*********************************************************************************************************
*/
uint8_t i2c_ReadByte(void)
{
uint8_t i;
uint8_t value;
/* 读到第1个bit为数据的bit7 */
value = 0;
for (i = 0; i < 8; i++)
{
value <<= 1;
BH1750_I2C_SCL_1();
i2c_Delay();
if (BH1750_I2C_SDA_READ())
{
value++;
}
BH1750_I2C_SCL_0();
i2c_Delay();
}
return value;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_WaitAck
* 功能说明: CPU产生一个时钟,并读取器件的ACK应答信号
* 形 参:无
* 返 回 值: 返回0表示正确应答,1表示无器件响应
*********************************************************************************************************
*/
uint8_t i2c_WaitAck(void)
{
uint8_t re;
BH1750_I2C_SDA_1(); /* CPU释放SDA总线 */
i2c_Delay();
BH1750_I2C_SCL_1(); /* CPU驱动SCL = 1, 此时器件会返回ACK应答 */
i2c_Delay();
if (BH1750_I2C_SDA_READ()) /* CPU读取SDA口线状态 */
re = 1;
else
re = 0;
BH1750_I2C_SCL_0();
i2c_Delay();
return re;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Ack
* 功能说明: CPU产生一个ACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Ack(void)
{
BH1750_I2C_SDA_0(); /* CPU驱动SDA = 0 */
i2c_Delay();
BH1750_I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
BH1750_I2C_SCL_0();
i2c_Delay();
BH1750_I2C_SDA_1(); /* CPU释放SDA总线 */
}
/*
*********************************************************************************************************
* 函 数 名: i2c_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_NAck(void)
{
BH1750_I2C_SDA_1(); /* CPU驱动SDA = 1 */
i2c_Delay();
BH1750_I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
BH1750_I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: I2C_BH1750_GPIOConfig
* 功能说明: 配置I2C总线的GPIO,采用模拟IO的方式实现
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
static void I2C_BH1750_GPIOConfig(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(BH1750_RCC_I2C_PORT, ENABLE); /* 打开GPIO时钟 */
GPIO_InitStructure.GPIO_Pin = BH1750_I2C_SCL_PIN | BH1750_I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; /* 开漏输出 */
GPIO_Init(BH1750_GPIO_PORT_I2C, &GPIO_InitStructure);
/* 给一个停止信号, 复位I2C总线上的所有设备到待机模式 */
i2c_Stop();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_CheckDevice
* 功能说明: 检测I2C总线设备,CPU向发送设备地址,然后读取设备应答来判断该设备是否存在
* 形 参:_Address:设备的I2C总线地址
* 返 回 值: 返回值 0 表示正确, 返回1表示未探测到
*********************************************************************************************************
*/
uint8_t i2c_CheckDevice(uint8_t _Address)
{
uint8_t ucAck;
i2c_Start(); /* 发送启动信号 */
/* 发送设备地址+读写控制bit(0 = w, 1 = r) bit7 先传 */
i2c_SendByte(_Address | BH1750_I2C_WR);
ucAck = i2c_WaitAck(); /* 检测设备的ACK应答 */
i2c_Stop(); /* 发送停止信号 */
return ucAck;
}
//BH1750写一个字节
//返回值 成功:0 失败:非0
uint8_t BH1750_Byte_Write(uint8_t data)
{
i2c_Start();
//发送写地址
i2c_SendByte(BH1750_Addr|0);
if(i2c_WaitAck()==1)
return 1;
//发送控制命令
i2c_SendByte(data);
if(i2c_WaitAck()==1)
return 2;
i2c_Stop();
return 0;
}
//BH1750读取测量数据
//返回值 成功:返回光照强度 失败:返回0
uint16_t BH1750_Read_Measure(void)
{
uint16_t receive_data=0;
i2c_Start();
//发送读地址
i2c_SendByte(BH1750_Addr|1);
if(i2c_WaitAck()==1)
return 0;
//读取高八位
receive_data=i2c_ReadByte();
i2c_Ack();
//读取低八位
receive_data=(receive_data<<8)+i2c_ReadByte();
i2c_NAck();
i2c_Stop();
return receive_data; //返回读取到的数据
}
//BH1750s上电
void BH1750_Power_ON(void)
{
BH1750_Byte_Write(POWER_ON);
}
//BH1750s断电
void BH1750_Power_OFF(void)
{
BH1750_Byte_Write(POWER_OFF);
}
//BH1750复位 仅在上电时有效
void BH1750_RESET(void)
{
BH1750_Byte_Write(MODULE_RESET);
}
//BH1750初始化
void BH1750_Init(void)
{
I2C_BH1750_GPIOConfig(); /* 配置GPIO */
BH1750_Power_ON(); //BH1750s上电
//BH1750_RESET(); //BH1750复位
BH1750_Byte_Write(Measure_Mode);
//SysTick_Delay_ms(120);
}
//获取光照强度
float LIght_Intensity(void)
{
return (float)(BH1750_Read_Measure()/1.1f*Resolurtion);
}
H文件
#ifndef __BH1750_H
#define __BH1750_H
#include "sys.h"
//BH1750的地址
#define BH1750_Addr 0x46
//BH1750指令码
#define POWER_OFF 0x00
#define POWER_ON 0x01
#define MODULE_RESET 0x07
#define CONTINUE_H_MODE 0x10
#define CONTINUE_H_MODE2 0x11
#define CONTINUE_L_MODE 0x13
#define ONE_TIME_H_MODE 0x20
#define ONE_TIME_H_MODE2 0x21
#define ONE_TIME_L_MODE 0x23
//测量模式
#define Measure_Mode CONTINUE_H_MODE
//分辨率 光照强度(单位lx)=(High Byte + Low Byte)/ 1.2 * 测量精度
#if ((Measure_Mode==CONTINUE_H_MODE2)|(Measure_Mode==ONE_TIME_H_MODE2))
#define Resolurtion 0.5
#elif ((Measure_Mode==CONTINUE_H_MODE)|(Measure_Mode==ONE_TIME_H_MODE))
#define Resolurtion 1
#elif ((Measure_Mode==CONTINUE_L_MODE)|(Measure_Mode==ONE_TIME_L_MODE))
#define Resolurtion 4
#endif
#define BH1750_I2C_WR 0 /* 写控制bit */
#define BH1750_I2C_RD 1 /* 读控制bit */
/* 定义I2C总线连接的GPIO端口, 只需要修改下面4行代码即可任意改变SCL和SDA的引脚 */
#define BH1750_GPIO_PORT_I2C GPIOB /* GPIO端口 */
#define BH1750_RCC_I2C_PORT RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define BH1750_I2C_SCL_PIN GPIO_Pin_10 /* 连接到SCL时钟线的GPIO */
#define BH1750_I2C_SDA_PIN GPIO_Pin_11
/* 连接到SDA数据线的GPIO */
/* 定义读写SCL和SDA的宏,已增加代码的可移植性和可阅读性 */
#if 0 /* 条件编译: 1 选择GPIO的库函数实现IO读写 */
#define BH1750_I2C_SCL_1() GPIO_SetBits(BH1750_GPIO_PORT_I2C, BH1750_I2C_SCL_PIN) /* SCL = 1 */
#define BH1750_I2C_SCL_0() GPIO_ResetBits(BH1750_GPIO_PORT_I2C, BH1750_I2C_SCL_PIN) /* SCL = 0 */
#define BH1750_I2C_SDA_1() GPIO_SetBits(BH1750_GPIO_PORT_I2C, BH1750_I2C_SDA_PIN) /* SDA = 1 */
#define BH1750_I2C_SDA_0() GPIO_ResetBits(BH1750_GPIO_PORT_I2C, BH1750_I2C_SDA_PIN) /* SDA = 0 */
#define BH1750_I2C_SDA_READ() GPIO_ReadInputDataBit(BH1750_GPIO_PORT_I2C, BH1750_I2C_SDA_PIN) /* 读SDA口线状态 */
#else /* 这个分支选择直接寄存器操作实现IO读写 */
/* 注意:如下写法,在IAR最高级别优化时,会被编译器错误优化 */
#define BH1750_I2C_SCL_1() BH1750_GPIO_PORT_I2C->BSRR = BH1750_I2C_SCL_PIN /* SCL = 1 */
#define BH1750_I2C_SCL_0() BH1750_GPIO_PORT_I2C->BRR = BH1750_I2C_SCL_PIN /* SCL = 0 */
#define BH1750_I2C_SDA_1() BH1750_GPIO_PORT_I2C->BSRR = BH1750_I2C_SDA_PIN /* SDA = 1 */
#define BH1750_I2C_SDA_0() BH1750_GPIO_PORT_I2C->BRR = BH1750_I2C_SDA_PIN /* SDA = 0 */
#define BH1750_I2C_SDA_READ() ((BH1750_GPIO_PORT_I2C->IDR & BH1750_I2C_SDA_PIN) != 0) /* 读SDA口线状态 */
#endif
void i2c_Start(void);
void i2c_Stop(void);
void i2c_SendByte(uint8_t _ucByte);
uint8_t i2c_ReadByte(void);
uint8_t i2c_WaitAck(void);
void i2c_Ack(void);
void i2c_NAck(void);
uint8_t i2c_CheckDevice(uint8_t _Address);
void BH1750_Init(void); //未包含IIC初始化
float LIght_Intensity(void); //读取光照强度的值
uint8_t BH1750_Byte_Write(uint8_t data);
uint16_t BH1750_Read_Measure(void);
void BH1750_Power_ON(void);
void BH1750_Power_OFF(void);
void BH1750_RESET(void);
#endif