程序示例精选
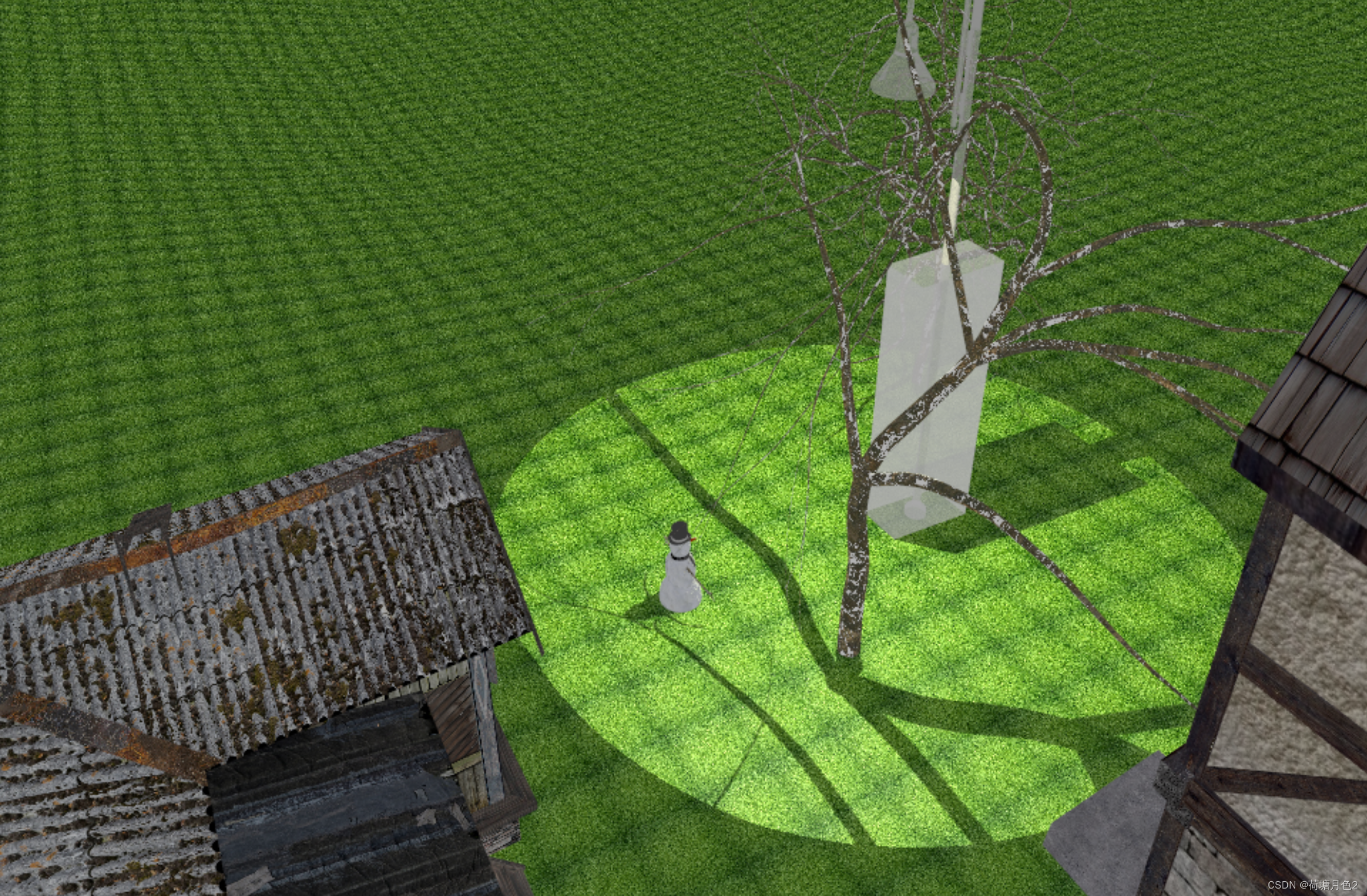
C++ OpenGL绘制三维立体skybox场景obj模型AABB碰撞检测旋转动画界面
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对《C++ OpenGL绘制三维立体skybox场景obj模型AABB碰撞检测旋转动画界面》编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
运行结果
文章目录
一、所需工具软件
二、使用步骤
1. 主要代码
2. 运行结果
三、在线协助
一、所需工具软件
1. VS2019,
2. C++
二、使用步骤
代码如下(示例):
void Scene::genDepthMap(GLuint*& depthMapFBO, GLuint*& depthMap, GLuint SHADOW_WIDTH, GLuint SHADOW_HEIGHT)
{
glGenFramebuffers(1, depthMapFBO);
glGenTextures(1, depthMap);
glBindTexture(GL_TEXTURE_2D, *depthMap);
glTexImage2D(GL_TEXTURE_2D, 0, GL_DEPTH_COMPONENT,
SHADOW_WIDTH, SHADOW_HEIGHT, 0, GL_DEPTH_COMPONENT, GL_FLOAT, NULL);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST);
// glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_MODE, GL_COMPARE_REF_TO_TEXTURE);
// glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_FUNC, GL_LEQUAL);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE);
glBindFramebuffer(GL_FRAMEBUFFER, *depthMapFBO);
//glFramebufferTexture2D(GL_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_TEXTURE_2D, *depthMap, 0);
//设置不适用任何颜色
glDrawBuffer(GL_NONE);
glReadBuffer(GL_NONE);
glBindFramebuffer(GL_FRAMEBUFFER, 0);
}
void Scene::RenderShadow()
{
glViewport(0, 0, 1024, 1024);
glBindFramebuffer(GL_FRAMEBUFFER, *depthMapFBO);
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_TEXTURE_2D, *depthMap, 0);
glDrawBuffer(GL_NONE);
glEnable(GL_DEPTH_TEST);
glClear(GL_DEPTH_BUFFER_BIT);
glUseProgram(DepthShader);
GLint loc = glGetUniformLocation(DepthShader, "lightMVP");
assert(loc >= 0);
mat4 MatInfo1 = light.PhysicalInfo.getPerspective() * light.PhysicalInfo.getView();
glUniformMatrix4fv(loc, 1, GL_FALSE, &MatInfo1[0][0]);
for (unsigned i = 0; i < Objects.size(); i++)
{
Objects[i].DepthFrameDraw(DepthShader);
}
glBindFramebuffer(GL_FRAMEBUFFER, 0);
}
void Scene::RenderObjects()
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glClearColor(.8f, .8f, .8f, 1.f);
glUseProgram(Shader);
glDrawBuffer(GL_FRONT);
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, *depthMap);
GLint loc = glGetUniformLocation(Shader, "shadowMap");
assert(loc >= 0);
glUniform1i(loc, 0);
float iResolution[2];
iResolution[0] = glutGet(GLUT_WINDOW_WIDTH);
iResolution[1] = glutGet(GLUT_WINDOW_HEIGHT);
glViewport(0, 0, iResolution[0], iResolution[1]);
loc = glGetUniformLocation(Shader, "IntensityAmbient");
assert(loc >= 0);
glUniform1f(loc, light.IntensityAmbient);
loc = glGetUniformLocation(Shader, "Intensity");
assert(loc >= 0);
glUniform1f(loc, light.Intensity);
loc = glGetUniformLocation(Shader, "LightPos");
assert(loc >= 0);
vec3 lightPos = light.PhysicalInfo.getCameroPos();
glUniform3f(loc, lightPos[0], lightPos[1], lightPos[2]);
loc = glGetUniformLocation(Shader, "lightMVP");
assert(loc >= 0);
mat4 MatInfo = light.PhysicalInfo.getPerspective() * light.PhysicalInfo.getView();;
glUniformMatrix4fv(loc, 1, GL_FALSE, &MatInfo[0][0]);
loc = glGetUniformLocation(Shader, "LightKa");
assert(loc >= 0);
glUniform3f(loc, light.Ka[0], light.Ka[1], light.Ka[2]);
loc = glGetUniformLocation(Shader, "LightKd");
assert(loc >= 0);
glUniform3f(loc, light.Kd[0], light.Kd[1], light.Kd[2]);
loc = glGetUniformLocation(Shader, "LightKs");
assert(loc >= 0);
glUniform3f(loc, light.Ks[0], light.Ks[1], light.Ks[2]);
loc = glGetUniformLocation(Shader, "CameroPos");
assert(loc >= 0);
vec3 CameroPos = Cam.getCameroPos();
glUniform3f(loc, CameroPos[0], CameroPos[1], CameroPos[2]);
loc = glGetUniformLocation(Shader, "View");
assert(loc >= 0);
mat4 MatV = Cam.getView();
glUniformMatrix4fv(loc, 1, GL_FALSE, &MatV[0][0]);
loc = glGetUniformLocation(Shader, "Perspective");
assert(loc >= 0);
mat4 MatP = Cam.getPerspective();
glUniformMatrix4fv(loc, 1, GL_FALSE, &MatP[0][0]);
glBindFramebuffer(GL_FRAMEBUFFER, 0);
for (unsigned i = 0; i < Objects.size(); i++)
{
Objects[i].Draw(Shader);
}
glBindFramebuffer(GL_FRAMEBUFFER, 0);
}
void Scene::RenderSkyBox()
{
skybox.Draw(Cam.getView(),Cam.getPerspective(), light.IntensityAmbient);
}
void Scene::drive(int data)
{
glutTimerFunc(20, drive, 1);
glutPostRedisplay();
}
void Scene::display()
{
//cout << "Pos(" << Cam.getCameroPos()[0] << "," << Cam.getCameroPos()[1] << "," << Cam.getCameroPos()[2] << endl;// "," <<
float iTime = glutGet(GLUT_ELAPSED_TIME) / 10;
const float R = 20.f;
// const float T = 120.f;
const float T = 30.f;
float theta = iTime * 0.05f * PI / T;
theta = glm::mod((double)theta, 2.f * PI);
vec3 pos;
if (theta < PI)
{
pos = vec3(cos(theta) * R, sin(theta) * R, 0);
light.PhysicalInfo.setCameroPos(pos);
float iResolution[2];
iResolution[0] = glutGet(GLUT_WINDOW_WIDTH);
iResolution[1] = glutGet(GLUT_WINDOW_HEIGHT);
light.PhysicalInfo.setPerspective(150, iResolution[0] / iResolution[1], 0.1, 80);
light.PhysicalInfo.setView(vec3(0, 0, 1), vec3(0, 0, 0) - pos);
light.Intensity = glm::max(0.5f * dot(vec3(0, 1, 0), normalize(pos)), 0.5f);
light.IntensityAmbient = light.Intensity + 0.2f; // 计
light.Kd = vec3(1);
}
else
{
pos = vec3(10.806, 5.25367, 10.0413);
light.PhysicalInfo.setCameroPos(pos);
light.PhysicalInfo.setView(vec3(1, 0, 0), vec3(0, -1, 0));
light.PhysicalInfo.setPerspective(90, 1, 0.1, 10); //
light.Intensity = 0.7;
light.IntensityAmbient = 0.7f;
light.Kd = vec3(0.8, 0.8, 0.5);
}
RenderShadow();
RenderObjects();
RenderSkyBox();
glutSwapBuffers();
}
void Scene::init()
{
//glEnable(GL_CULL_FACE);
glEnable(GL_DEPTH_TEST);
glEnable(GL_TEXTURE_2D);
glEnable(GL_MULTISAMPLE);
glHint(GL_MULTISAMPLE_FILTER_HINT_NV, GL_NICEST);
// detect current settings
GLint iMultiSample = 0;
GLint iNumSamples = 0;
glGetIntegerv(GL_SAMPLE_BUFFERS, &iMultiSample);
glGetIntegerv(GL_SAMPLES, &iNumSamples);
printf("MSAA on, GL_SAMPLE_BUFFERS = %d, GL_SAMPLES = %d\n", iMultiSample, iNumSamples);
string VertShader, FragShader;
VertShader = "shaders/Shader.vert";
FragShader = "shaders/Shader.frag";
ShaderInfo shaders[] = {
{ GL_VERTEX_SHADER, VertShader.c_str()},
{ GL_FRAGMENT_SHADER, FragShader.c_str()},
{ GL_NONE, NULL }
};
Shader = LoadShaders(shaders);
VertShader = "shaders/depthShader.vert";
FragShader = "shaders/depthShader.frag";
ShaderInfo Depthshaders[] = {
{ GL_VERTEX_SHADER, VertShader.c_str()},
{ GL_FRAGMENT_SHADER, FragShader.c_str()},
{ GL_NONE, NULL }
};
DepthShader = LoadShaders(Depthshaders);
depthMapFBO = new GLuint;
depthMap = new GLuint;
genDepthMap(depthMapFBO, depthMap, 1024, 1024);
for (unsigned i = 0; i < Objects.size(); i++)
Objects[i].Init(false,Shader);
for (unsigned i = 0; i < Objects.size(); i++)
Objects[i].Init(true, DepthShader);
skybox.init();
vector<Material> materials = Material::loadMate("texture", "your_material_file.mtl");
if (Man2Index < Objects.size()) {
cout << "testMan2Index" << endl;
Material man2Material = Material(vec3(0.1f, 0.1f, 0.1f), // Ka
vec3(0.7f, 0.7f, 0.7f), // Kd
vec3(1.0f, 1.0f, 1.0f), // Ks
32.0f, // Ns
"man2Material");
man2Material.Ka = vec3(0.1, 0.1, 0.1);
man2Material.Kd = vec3(0.7, 0.7, 0.7);
man2Material.Ks = vec3(1.0, 1.0, 1.0);
man2Material.Ns = 2000.0;
}
}
运行结果

三、在线协助:
如需安装运行环境或远程调试,见文章底部个人 QQ 名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Visual Studio, Qt, C++, Python编程语言入门指导
3)界面美化
4)软件制作
5)云服务器申请
6)网站制作
当前文章连接:https://blog.csdn.net/alicema1111/article/details/132666851
个人博客主页:https://blog.csdn.net/alicema1111?type=blog
博主所有文章点这里:https://blog.csdn.net/alicema1111?type=blog
博主推荐:
Python人脸识别考勤打卡系统:
https://blog.csdn.net/alicema1111/article/details/133434445
Python果树水果识别:https://blog.csdn.net/alicema1111/article/details/130862842
Python+Yolov8+Deepsort入口人流量统计:https://blog.csdn.net/alicema1111/article/details/130454430
Python+Qt人脸识别门禁管理系统:https://blog.csdn.net/alicema1111/article/details/130353433
Python+Qt指纹录入识别考勤系统:https://blog.csdn.net/alicema1111/article/details/129338432
Python Yolov5火焰烟雾识别源码分享:https://blog.csdn.net/alicema1111/article/details/128420453
Python+Yolov8路面桥梁墙体裂缝识别:https://blog.csdn.net/alicema1111/article/details/133434445








![[SWPUCTF 2021 新生赛]include](https://img-blog.csdnimg.cn/direct/5e36a8c8426a408d97af45254267aca2.png)



{kind=link}