目录
一、图像矩
1、矩的概念介绍
2、相关的API
3、代码演示
二、点多边形测试
1、概念介绍-点多边形测试
2、cv::pointPolygonTest
3、代码演示
一、图像矩
引言
在数字图像处理、计算机视觉与相关领域中,图像矩(Image moments)是指图像的某些特定像素灰度的加权平均值(矩),或者是图像具有类似功能或意义的属性。
图像矩通常用来描述 分割 后的图像对象。可以通过图像的矩来获得图像的部分性质,包括面积(或总体亮度),以及有关几何中心和方向的信息 。
1、矩的概念介绍
图像矩是用于描述图像形状特征的一种数学工具。它们可以用于计算图像的几何特征,如质心、面积、方向等。
在图像处理中,常用的图像矩包括原始矩和中心矩。通过计算图像的原始矩和中心矩,可以得到一些常用的图像特征,如图像的面积、质心位置、方向、轮廓等。这些特征对于图像识别、形状匹配和目标跟踪等应用非常有用。
(1)原始矩:描述了图像中像素的位置和强度信息。
(2)几何矩 :
P代表像素,* 位置,算出所有的和
![]()
(3)中心距 :中心矩是以质心为中心的矩,相比原始矩,只要添加一个平移即可。中心矩是相对于图像质心的矩,可以用来描述图像的旋转和缩放特征。
周边的点到中心的距离

(4)中心归一化距
![]()
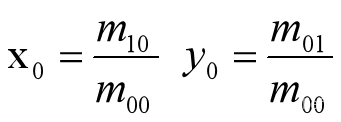
(5)图像中心Center(x0,y0)
2、相关的API
(1)计算生成数据
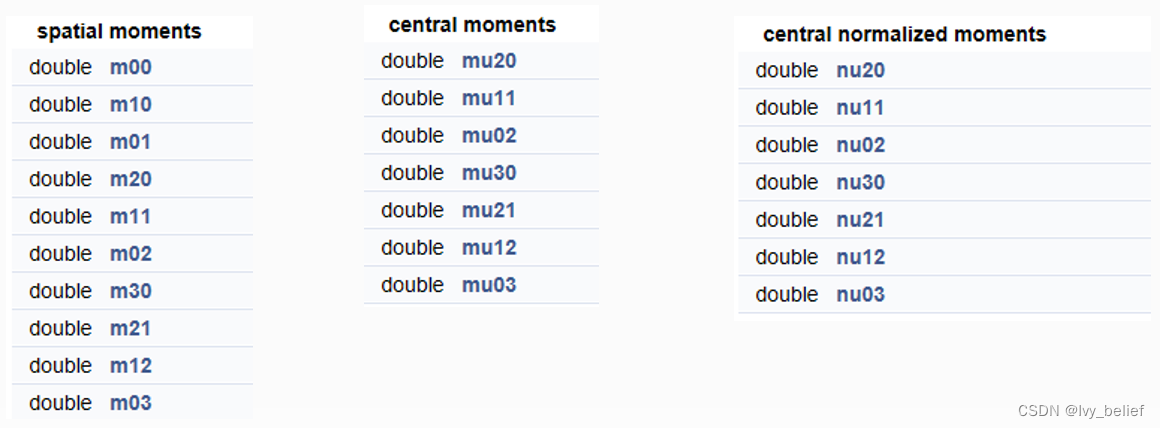
(2)cv::moments( )
cv::moments(
InputArray array,//输入数据
bool binaryImage=false // 是否为二值图像
)
(3)cv::contourArea()
contourArea(
InputArray contour,//输入轮廓数据
bool oriented// 默认false、返回绝对值
)
(4)cv::arcLength()
arcLength(
InputArray curve,//输入曲线数据
bool closed// 是否是封闭曲线
)
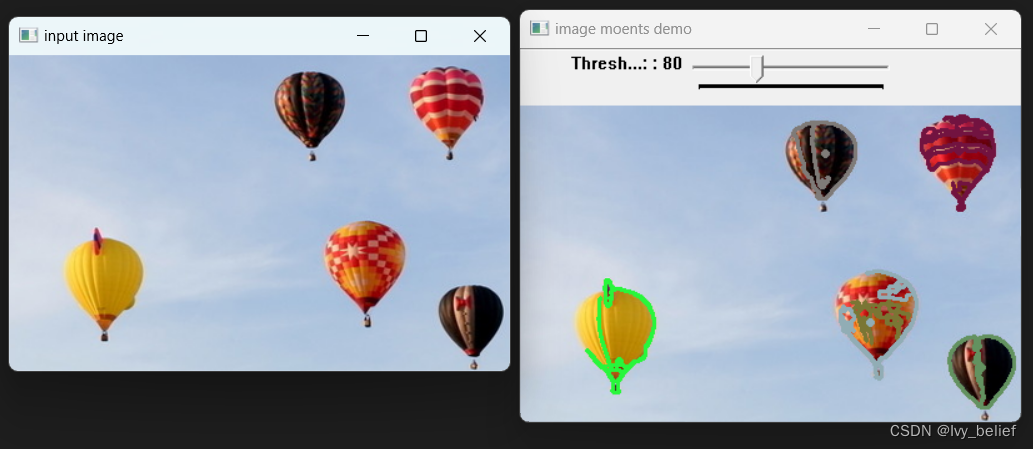
3、代码演示
主要的流程步骤:
(1)提取图像边缘
(2)发现轮廓
(3)计算每个轮廓对象的矩
(4)计算每个对象的中心、弧长、面积
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
Mat src, gray_src;
int threshold_value = 80;
int threshold_max = 255;
const char* output_win = "image moents demo";
RNG rng(12345);
void Demo_Moments(int, void*);
int main(int argc, char** argv) {
src = imread("D:/vcprojects/images/circle.png");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
cvtColor(src, gray_src, CV_BGR2GRAY);
GaussianBlur(gray_src, gray_src, Size(3, 3), 0, 0);
char input_win[] = "input image";
namedWindow(input_win, CV_WINDOW_AUTOSIZE);
namedWindow(output_win, CV_WINDOW_AUTOSIZE);
imshow(input_win, src);
createTrackbar("Threshold Value : ", output_win, &threshold_value, threshold_max, Demo_Moments);
Demo_Moments(0, 0);
waitKey(0);
return 0;
}
void Demo_Moments(int, void*) {
Mat canny_output;
vector<vector<Point>> contours;
vector<Vec4i> hierachy;
Canny(gray_src, canny_output, threshold_value, threshold_value * 2, 3, false);
findContours(canny_output, contours, hierachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
vector<Moments> contours_moments(contours.size());
vector<Point2f> ccs(contours.size());
for (size_t i = 0; i < contours.size(); i++) {
contours_moments[i] = moments(contours[i]);
ccs[i] = Point(static_cast<float>(contours_moments[i].m10 / contours_moments[i].m00), static_cast<float>(contours_moments[i].m01 / contours_moments[i].m00));
}
Mat drawImg;// = Mat::zeros(src.size(), CV_8UC3);
src.copyTo(drawImg);
for (size_t i = 0; i < contours.size(); i++) {
if (contours[i].size() < 100) {
continue;
}
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
printf("center point x : %.2f y : %.2f\n", ccs[i].x, ccs[i].y);
printf("contours %d area : %.2f arc length : %.2f\n", i, contourArea(contours[i]), arcLength(contours[i], true));
drawContours(drawImg, contours, i, color, 2, 8, hierachy, 0, Point(0, 0));
circle(drawImg, ccs[i], 2, color,2, 8);
}
imshow(output_win, drawImg);
return;
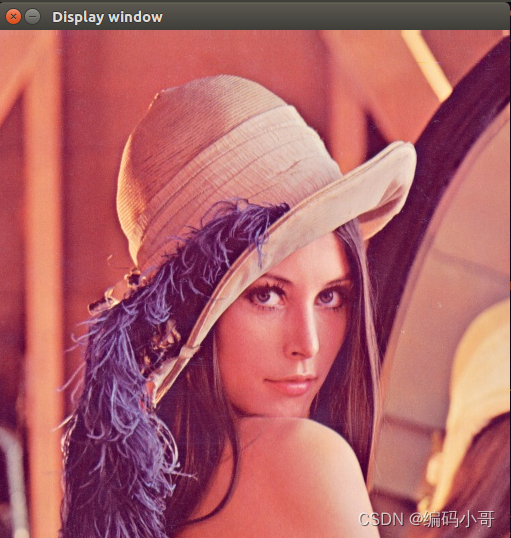
}效果展示:
二、点多边形测试
1、概念介绍-点多边形测试
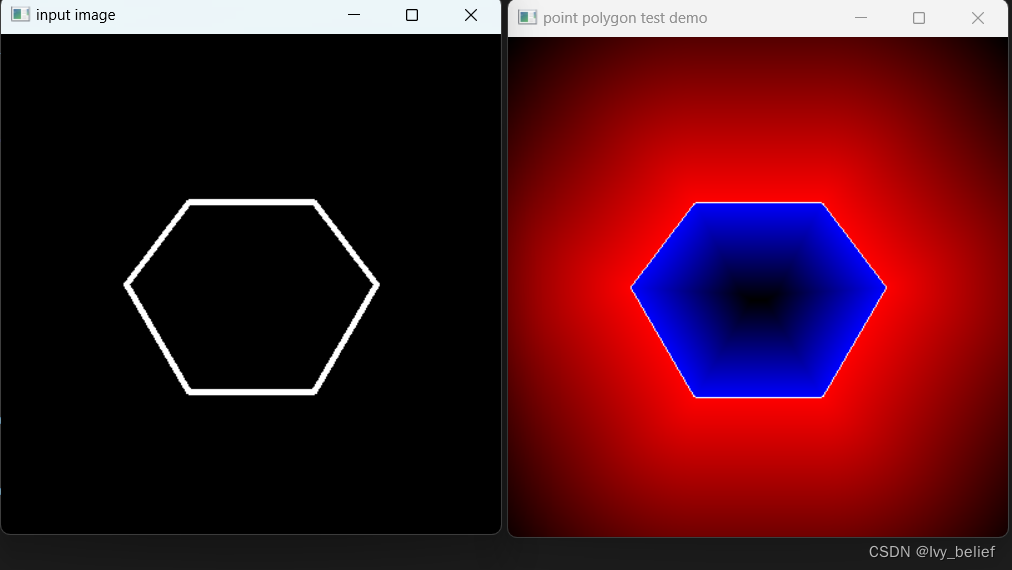
测试一个点是否在给定的多边形内部,边缘或者外部的一个方法。
根据左边的图进行点多边形测试之后,知道每个点在图像内部、边缘或者是在外部;
并计算出每个点到中间的距离,根据这些距离可以生出右边的图。

2、cv::pointPolygonTest
double cv::pointPolygonTest(
InputArray contour,// 输入的轮廓
Point2f pt, // 测试点
bool measureDist // 是否返回距离值,true返回实际距离,
如果是false,1表示在内面,0表示在边界上,-1表示在外部
)
返回数据是double类型。
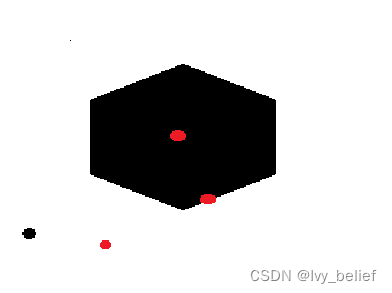
3、代码演示
演示代码主要步骤:
- 构建一张400x400大小的图片, Mat::Zero(400, 400, CV_8UC1)
- 画上一个六边形的闭合区域line
- 发现轮廓
- 对图像中所有像素点做点 多边形测试,得到距离,归一化后显示。
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
const int r = 100;
Mat src = Mat::zeros(r * 4, r * 4, CV_8UC1);
vector<Point2f> vert(6);
vert[0] = Point(3 * r / 2, static_cast<int>(1.34*r));
vert[1] = Point(1 * r, 2 * r);
vert[2] = Point(3 * r / 2, static_cast<int>(2.866*r));
vert[3] = Point(5 * r / 2, static_cast<int>(2.866*r));
vert[4] = Point(3 * r, 2 * r);
vert[5] = Point(5 * r / 2, static_cast<int>(1.34*r));
for (int i = 0; i < 6; i++) {
line(src, vert[i], vert[(i + 1) % 6], Scalar(255), 3, 8, 0);
}
vector<vector<Point>> contours;
vector<Vec4i> hierachy;
Mat csrc;
src.copyTo(csrc);
findContours(csrc, contours, hierachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
Mat raw_dist = Mat::zeros(csrc.size(), CV_32FC1);
for (int row = 0; row < raw_dist.rows; row++) {
for (int col = 0; col < raw_dist.cols; col++) {
double dist = pointPolygonTest(contours[0], Point2f(static_cast<float>(col), static_cast<float>(row)), true);
raw_dist.at<float>(row, col) = static_cast<float>(dist);
}
}
double minValue, maxValue;
minMaxLoc(raw_dist, &minValue, &maxValue, 0, 0, Mat());
Mat drawImg = Mat::zeros(src.size(), CV_8UC3);
for (int row = 0; row < drawImg.rows; row++) {
for (int col = 0; col < drawImg.cols; col++) {
float dist = raw_dist.at<float>(row, col);
if (dist > 0) {
drawImg.at<Vec3b>(row, col)[0] = (uchar)(abs(1.0 - (dist / maxValue)) * 255);
}
else if (dist < 0) {
drawImg.at<Vec3b>(row, col)[2] = (uchar)(abs(1.0 - (dist / minValue)) * 255);
} else {
drawImg.at<Vec3b>(row, col)[0] = (uchar)(abs(255 - dist));
drawImg.at<Vec3b>(row, col)[1] = (uchar)(abs(255 - dist));
drawImg.at<Vec3b>(row, col)[2] = (uchar)(abs(255 - dist));
}
}
}
const char* output_win = "point polygon test demo";
char input_win[] = "input image";
namedWindow(input_win, CV_WINDOW_AUTOSIZE);
namedWindow(output_win, CV_WINDOW_AUTOSIZE);
imshow(input_win, src);
imshow(output_win, drawImg);
waitKey(0);
return 0;
}效果展示:
可以了解一下不同位置的点:
(1)内部
drawImg.at<Vec3b>(row, col)[0] = (uchar)((abs(dist / maxValue) * 255);(2)外部
drawImg.at<Vec3b>(row, col)[1] = (uchar)((abs(dist / minValue) * 255);(3)边缘线
drawImg.at<Vec3b>(row, col)[0] =255;
drawImg.at<Vec3b>(row, col)[1] = saturate_cast<uchar>(minValue);
drawImg.at<Vec3b>(row, col)[2] = saturate_cast<uchar>(minValue);



![[office] excel2010双向条形图制作 #经验分享#微信](https://img-blog.csdnimg.cn/img_convert/75daee5e3a71beb1cbba7365f481905c.jpeg)