一、Introduction to PID Control
PID控制是一种应用非常广泛的控制算法。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。PID(proportion integration differentiation)其实就是指比例,积分,微分控制,当得到系统的输出后,将输出经过比例、积分、微分3种运算,叠加到输入中,从而控制系统的行为[1]。
PID控制理念最早提出是在1932年,由Nyquist在一篇论文当中提出了采用图形的方法来判断系统的稳定性。在他的基础上,H. W. Bode等人建立了一整套在频域范围设计反馈放大器的方法,后被用于自动控制系统的分析和设计,这也是PID算法最早从书面走向实践。与此同时,反馈控制原理开始应用于工业过程中。1936年英国的考伦德(A Callender)和斯蒂文森(A Stevenson)等人给出了 PID控制器的方法,自此PID算法正式形成了,并且后来在自动控制技术中占有非常重要的地位[2]。
PID校正装置是用比例(Proportional)、积分(Integral)和微分(Derivative)控制规律组成的串联校正装置,使用方便,适应性强,易于工程实现。而且根据需要,可以变形为P、PI或PID等类型调节器。目前在理论上已经证明,对于过程控制的典型对象——“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制。
 二、Principles of PID Control and PID Parameters
二、Principles of PID Control and PID Parameters
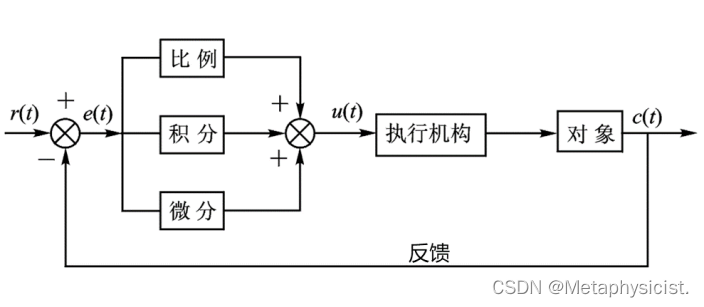
PID控制的主要过程是通过对被控对象的当前值进行采样,并计算采样值与期望值的偏差,再将这个偏差反馈给PID控制器,从而调整对被控对象的输入(执行器的输出)。这里的偏差指给定量与反馈量之差,可以量测;而我们常说的误差为系统输出的实际值与期望值之差,无法量测,只有数学意义。偏差存在极性,有正偏差和负偏差之分。
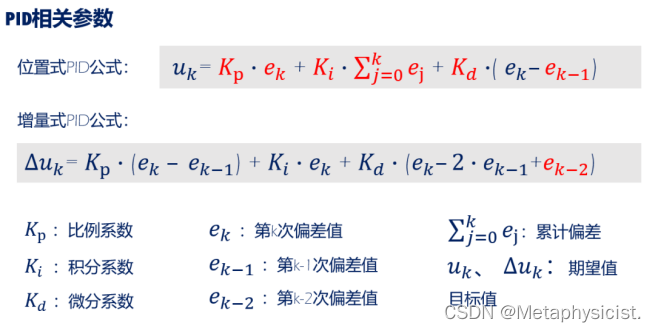
PID控制器(比例-积分-微分控制器),由比例单元(Proportion)、积分单元(Integral)和微分单元(Derivative)组成,通过Kp, Ki和Kd三个参数进行设定。
Kp(比例系数)代表了当前的信息,起纠正偏差的作用,使反应迅速;
Kd(微分系数)代表了将来的信息,在过程开始时强迫过程进行,过程结束时减小超调,克服振荡,提高系统的稳定性,加快系统的过渡过程;
Ki(积分系数)代表了过去积累的信息,它能消除静差,改善系统的静态特性。
采用PID调节器,往往并不需要知道于控制对象的精确数学模型,这是它的优点,但也正因如此,其参数通常也都是根据经验在线整定,以便得到满意的控制效果[3][4]。

三、Parameter tuning of PID controller
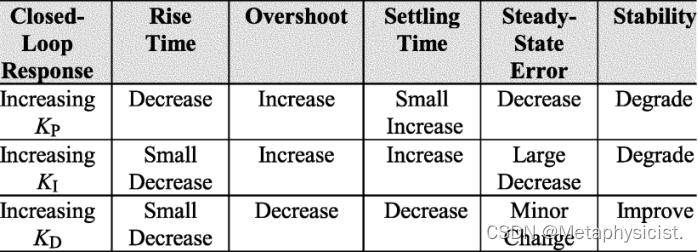
PID调节器各增益参数增加对系统时域指标的影响如下[5]:
需要设定的值有:
·目标值(Setpoint)
·pid参数(Kp,Ki,Kd)
·输出极限(Output Limits)
·采样时间(Sample Time)
PID控制整定法有理论计算法和经验整定法两种。


经验法
首先需要注意的是,由于闭环调节的影响因素,PID参数是无法通过数学建模的方式获取的,只有通过实际调试获得参数。即便如此,我们仍可以给出一些保守的PID参数作为初值,见下表:
一般采用的是临界比例法(属于工程整定法)。
工程整定法主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。(简单来讲就是试凑)[1]。
临界比例法
一般采用的是临界比例法(属于工程整定法)。
工程整定法主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。(简单来讲就是试凑)。
PID调节的实质在于取得快速性和稳定性的折中,利用该方法进行PID控制器参数的整定步骤如下:
(1)首先预选择一个足够短的采样时间让系统工作,输入设定为系统允许的最大值(输出极限)的60%~70%。 控制时间根据实际工艺过程决定,一般默认1s,通常建议先从默认值开始,再根据结果进行调整,由于电机PID调节无滞后,顾在效果不佳的情况下也可尝试缩短采样时间。
(2)仅加入P比例控制环节。 当手动调节PID控制器时,通常按照P,I,D的顺序调整参数。初调时,Kp选小一些,这是为了尽可能减小比例作用;然后慢慢调大,直到系统对输入的阶跃信号(Step Function)出现临界振荡,记下这时的比例放大系数和临界振荡周期。如果后续需要加入积分控制环节,则需设定Kp为当前值的60%~70%,这是因为当Kp调整至接近期望值后,Ki就开始减少到合适值,这会导致稳定性的降低,反过来Ki又需要减少;
临界是介于收敛和发散的一种过渡状态。临界振荡指等幅振荡。
(3)加入I积分控制环节。 积分系数初调时要把积分时间设置长些,这是为了减小积分作用;然后慢慢调小直到系统稳定为止,设定PID的积分时间常数Ti为当前值的150%~180%。
一般情况下到此为止
(4)D微分控制环节一般不用设定,待整定参数越多,则整定难度越大。如果通过比例、积分参数的调节还是收不到理想的控制要求,才调节微分时间。初调时把这个系数设小,然后慢慢调大,直到系统稳定。除了会导致调参复杂,不使用微分控制环节的原因是其易受噪声和其它扰动影响,并将其放大到更大的程度,导致稳定性降低。
References
[1] 线性系统的矫正方法——PID控制理论. CSDN.
[2] The PID Controller & Theory Explained. NI.com.
[3] PID控制算法原理(抛弃公式,从本质上真正理解PID控制). zhihu.com.
[4] PID控制. 古月居.
[5] Kiam Heong Ang, G. Chong and Yun Li, "PID control system analysis, design, and technology," in IEEE Transactions on Control Systems Technology, vol. 13, no. 4, pp. 559-576, July 2005, doi: 10.1109/TCST.2005.847331.
附录:用matlab实现倒立摆的pid控制
% 倒立摆PID控制程序
% 参数设置
m = 0.5; % 摆杆质量
l = 0.25; % 摆杆长度
g = 9.81; % 重力加速度
I = m * l^2; % 摆杆惯性矩
% 目标角度和初始角度
theta_desired = pi/4; % 目标角度设定为45度
theta0 = 0; % 初始角度为0度
% PID控制器参数
Kp = 10; % 比例增益
Ki = 5; % 积分增益
Kd = 2; % 微分增益
% 时间步长和模拟时间
dt = 0.01; % 时间步长
t_sim = 5; % 模拟时间
% 初始化变量
theta = zeros(1, t_sim/dt + 1); % 角度数组
theta_dot = zeros(1, t_sim/dt + 1); % 角速度数组
theta_error = zeros(1, t_sim/dt + 1); % 角度误差数组
theta_integral = 0; % 角度误差积分
theta_prev = theta0; % 上一时刻的角度
% 模拟
for t = 0:dt:t_sim
% 计算角度误差和积分项
theta_error_current = theta_desired - theta_prev;
theta_integral = theta_integral + theta_error_current * dt;
% 计算控制信号
u = Kp * theta_error_current + Ki * theta_integral + Kd * (theta_error_current - theta_error(end))/dt;
% 计算角度加速度
theta_acc = (m * g * l * sin(theta_prev) - u) / I;
% 更新角度和角速度
theta_dot_next = theta_dot(end) + theta_acc * dt;
theta_next = theta_prev + theta_dot_next * dt;
% 更新变量
theta(end+1) = theta_next;
theta_dot(end+1) = theta_dot_next;
theta_error(end+1) = theta_error_current;
theta_prev = theta_next;
end
% 绘制图形
t = 0:dt:t_sim;
plot(t, theta);
xlabel('Time');
ylabel('Angle');
title('Inverted Pendulum PID Control');

![[BUUCTF 2018]Online Tool(特详解)](https://img-blog.csdnimg.cn/img_convert/77e34e7e79cd1578ee5a5c64480b4e76.png)