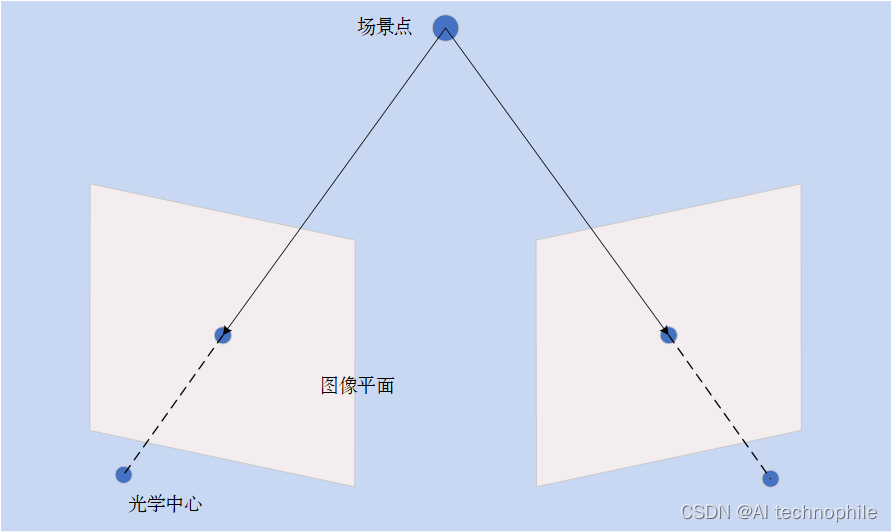
[Python图像处理] 使用OpenCV创建深度图
news2026/2/15 13:11:59
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1417794.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

智慧文旅:打造无缝旅游体验的关键
随着科技的快速发展和消费者需求的不断升级,旅游业正面临着前所未有的变革压力。智慧文旅作为数字化转型的重要领域,旨在通过智能化、数据化手段为游客提供更加优质、便捷、个性化的服务,打造无缝的旅游体验。本文将深入探讨智慧文旅在打造无…
【golang】16、dlv 调试工具、vscode+ssh 远程调试
文章目录 Goland Debug 模式崩溃 Goland Debug 模式崩溃
有时遇到如下现象: Golang Run 模式正常,Debug 无 BreakPoint 模式正常,但 Debug 加 BreakPoint 就会偶现 panic,panic 信息如下。
panic: runtime error: index out of …
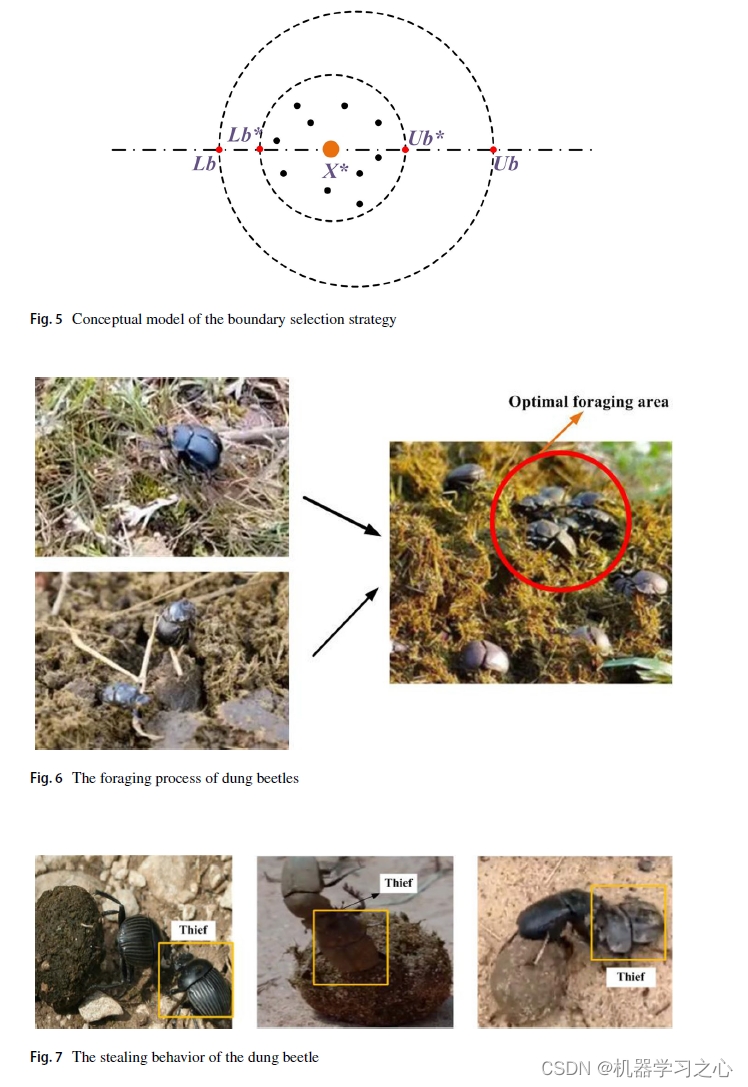
多维时序 | Matlab实现DBO-LSTM蜣螂算法优化长短期记忆神经网络多变量时间序列预测
多维时序 | Matlab实现DBO-LSTM蜣螂算法优化长短期记忆神经网络多变量时间序列预测 目录 多维时序 | Matlab实现DBO-LSTM蜣螂算法优化长短期记忆神经网络多变量时间序列预测效果一览基本介绍程序设计参考资料 效果一览 基本介绍 1.Matlab实现DBO-LSTM多变量时间序列预测&#x…

【Javaweb程序】【C00155】基于SSM的旅游旅行管理系统(论文+PPT)
基于SSM的旅游旅行管理系统(论文PPT) 项目简介项目获取开发环境项目技术运行截图 项目简介
这是一个基于SSM的旅游旅行管理系统 本系统分为前台系统模块、管理员模块、用户模块以及商家模块 其中前台系统模块的权限为:当游客打开系统的网址后…
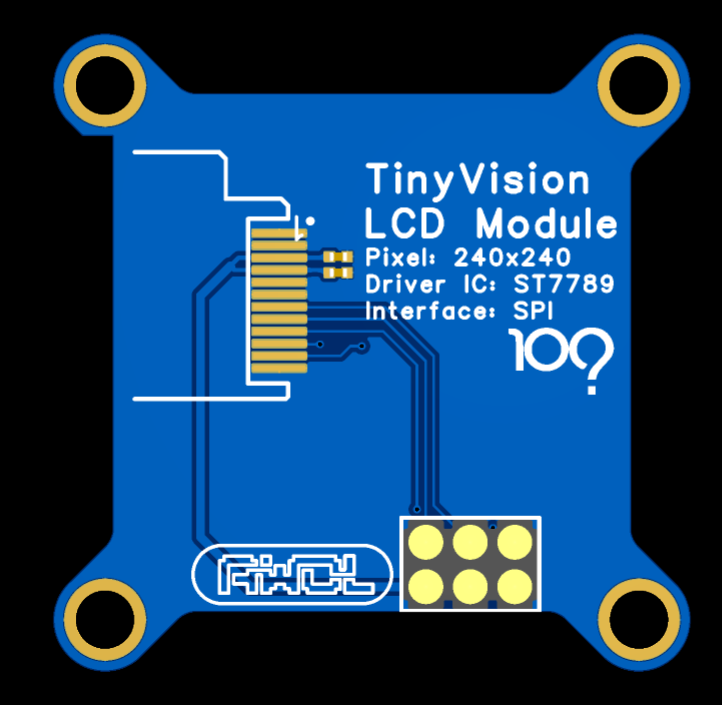
1月全志芯片开源项目分享合辑
1、柚子爱AI相机(YuzuAI-YuzuMaix-AIoT-V831) 本项目于去年4月首次发布,是基于V831的AI相机开源项目,经过几个版本的迭代,最终运用了叠层的设计来实现AI摄像头掌控板的奇葩组合。
开发板主控是全志V831,采…
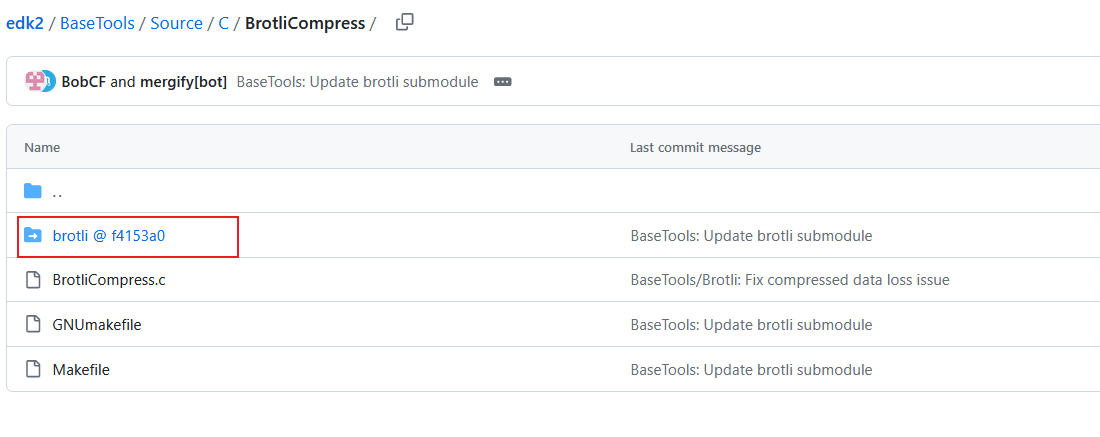
Windows下EDK2快速搭建(详细)过程总结附软件包地址
目录 简介一、软件包下载安装VS2019下载NASM安下载LLVM/CLANG下载IASL下载安装Python安装OpenSSL下载EDK2 二、设置环境变量新增python系统变量新增NASM系统变量 三、编译3.1 在edk2目录直接输入cmd3.2 在cmd目录输入:edksetup.bat3.3 打开edk2编译窗口3.4 确认编译…

2023年度总结——忙忙碌碌,终有归章
思来想去,还是决定写一篇年终总结,一来算是对23年的一年的回顾,二来是对24年的展望。记得22年也写过一篇年度总结,题目是《2022年度总结——一切都在慢慢变好》。今年,我想起的题目是《2023年度总结——忙忙碌碌&#…

基于springboot的历史馆藏系统
文章目录 项目介绍主要功能截图:部分代码展示设计总结项目获取方式 🍅 作者主页:超级无敌暴龙战士塔塔开 🍅 简介:Java领域优质创作者🏆、 简历模板、学习资料、面试题库【关注我,都给你】 &…

将elasticsearch数据存储到excel中
由于elasticsearch数据在线上,偶尔需要将数据导到本地环境进行分析。目前有需求是将数据导入到excel表中,下面是我在用的实现方案。
1、将线上elasticsearch数据备份成文件
首先通过elasticdump组件将线上指定的index导出成文本文件
elasticdump --in…
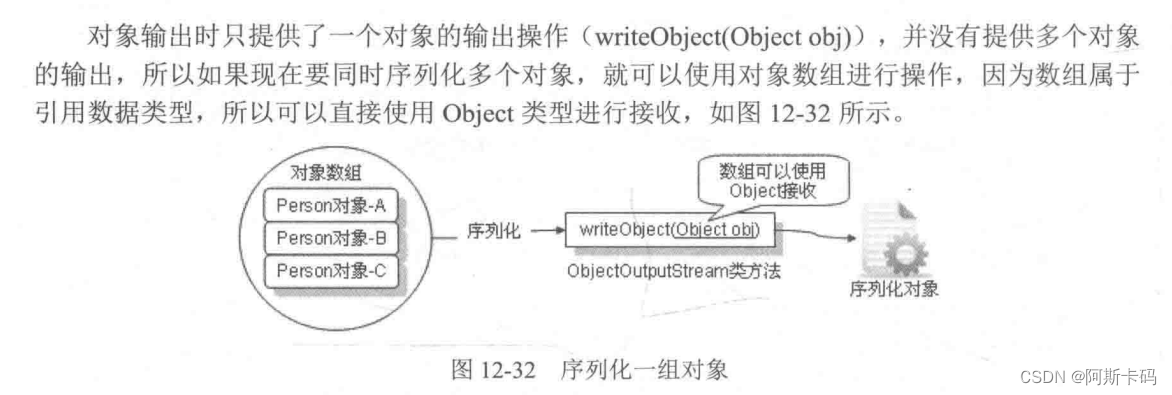
12.16对象序列化(血干JAVA系列)
对象序列化 12.16对象序列化12.16.1 基本概念与 Serializable 接口12.16.2 对象输出流ObjectOutputStream【例12.71】将Person类的对象保存在文件之中 12.16.3 对象输入流 Objectinputstream【例12.72】从文件中将Person对象反序列化(读取) 12.16.4 Exte…

第八篇【传奇开心果短博文系列】Python的OpenCV技术点案例示例:深度学习
传奇开心果短博文系列 系列短博文目录Python的OpenCV技术点案例示例系列 短博文目录一、前言二、OpenCV深度学习介绍三、OpenCV常用深度学习算法和实现分别示例代码四、归纳总结 系列短博文目录
Python的OpenCV技术点案例示例系列
短博文目录
一、前言
OpenCV深度学习&…
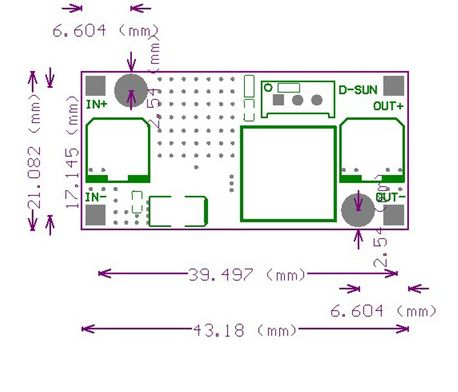
降压模块LM2596S的操作使用
一、技术参数 二、使用说明 1.引脚说明:
IN输入正极
IN-输入负极
OUT输出正极
OUT-输出负极
2.输入电压范围:直流3.2V 至 46V (输入的电压必须比要输出的电压高1.5V以上。不能升压) 3.输出电压范围:直流 1.25V至 35V 电压连续可调&#…

激光雷达,角力「降本增效」
高工智能汽车研究院最新发布的数据显示,2023年1-11月,中国市场(不含进出口)乘用车前装标配激光雷达搭载量为46.48万颗,同比增长372.35%,继续保持高增长态势。 随着激光雷达在中国市场完成规模化上量的节点&…
C++(16)——vector的模拟实现
前面的文章中,给出了对于的模拟实现,本篇文章将给出关于的模拟实现。
目录
1.基本框架:
2. 返回值与迭代器:
2.1 返回值capacity与size:
2.2 两种迭代器iterator和const_iterator:
3. 扩容与push_back与pop_back:…
好友管理系统----Python实例练习
题目描述
如今的社交软件层出不穷,虽然功能千变万化,但都具有好友管理系统的基本功能,包括添加好友,删除好友,备注好友,展示好友等。次案例要求用Python中的列表知识实现。
程序代码
print("欢迎使…

你还在使用websocket实现实时消息推送吗?
前言
在日常的开发中,我们经常能碰见服务端需要主动推送给客户端数据的业务场景,比如数据大屏的实时数据,比如消息中心的未读消息,比如聊天功能等等。
本文主要介绍SSE的使用场景和如何使用SSE。
服务端向客户端推送数据的实现…

LabVIEW扫频阻抗测试系统
实现扫频阻抗法用于检测变压器绕组变形,结合了短路阻抗法和频响法的优点,但受限于硬件精度,尤其是50 Hz短路阻抗测试存在稳定性和准确性的问题。通过LabVIEW编程,控制宽频带信号发生器和高速采集卡,提高测试结果的稳定…

【大数据】Flink 架构(二):数据传输
《Flink 架构》系列(已完结),共包含以下 6 篇文章:
Flink 架构(一):系统架构Flink 架构(二):数据传输Flink 架构(三):事件…

(2)(2.9) Holybro Microhard P900无线电遥测设备
文章目录
前言
1 特点
2 规格
3 包装内包括 前言
Holybro Microhard Radio 集成了 microhard Pico 系列射频模块,能够在强大的拓扑结构中提供高性能无线串行通信,如点对点、点对多点和安全 Mesh(P840 不提供 Mesh)。 它采用跳…

翻译: GPT-4 Vision静态图表转换为动态数据可视化 升级Streamlit 三
GPT-4 Vision 系列:
翻译: GPT-4 with Vision 升级 Streamlit 应用程序的 7 种方式一翻译: GPT-4 with Vision 升级 Streamlit 应用程序的 7 种方式二
1. 将任何静态图表转换为动态数据可视化
ChatGPT Vision 不仅可以将涂鸦变成功能齐全的 Streamlit 应用程序,还…