野火霸道V2学习笔记
- STM32F103学习笔记
- 说明
- 基础配置
- 配置KeilMDK
- 配置串口下载程序
- 美化Keil界面
- 配置VScode
- 理论知识
- STM32命名方式
- 例子
- 置位与清零
- GPIO
- GPIO简介
- GPIO和引脚的区别
- 引脚的分类
- GPIO 框图讲解
- 保护二极管
- 推挽输出
- 开漏输出
- 补充: 高阻态与悬空
- 复用功能输出
- 输入模式
- GPIO框图对应寄存器
- GPIO输出初始化顺序
- 手写库
- 通过地址使用寄存器
- 通过头文件定义使用寄存器
- 补充: 关键字volatile的作用
- 通过结构体操作寄存器
- 更换LED说明
- 增加端口置位/复位函数
- 补充: 在C语言中#ifndef的作用
- 解决stm32f10x.h重复定义
- 补充: #ifndef格式问题
- 增加GPIO初始化结构体
- 增加宏定义来增强代码可移植性
- 固件库编程
- STM32固件库文件分析
- 新建固件库版本工程
- GPIO输出-使用固件库点亮LED
- 使用\的注意事项
- GPIO输入
- 补充: C语言中的异或操作
- 位带操作
- 位带简介
- 位带操作的原理
- 地址映射
- 示例
- 注意事项
- 使用位带操作实现GPIO的输出和输入
- 启动文件详解
- EQU指令
- EQU手册说明
- AREA指令
- AREA手册说明
- SPACE指令
- SPACE手册说明
- PRESERVE8指令
- PRESERVE8手册说明
- THUMB指令
- THUMB手册说明
- EXPORT指令
- EXPORT手册说明
- DCD指令
- DCD手册说明
- PROC指令
- PROC手册说明
- IMPORT指令
- IMPORT手册说明
- LDR指令
- LDR手册说明
- BLX指令
- BX指令
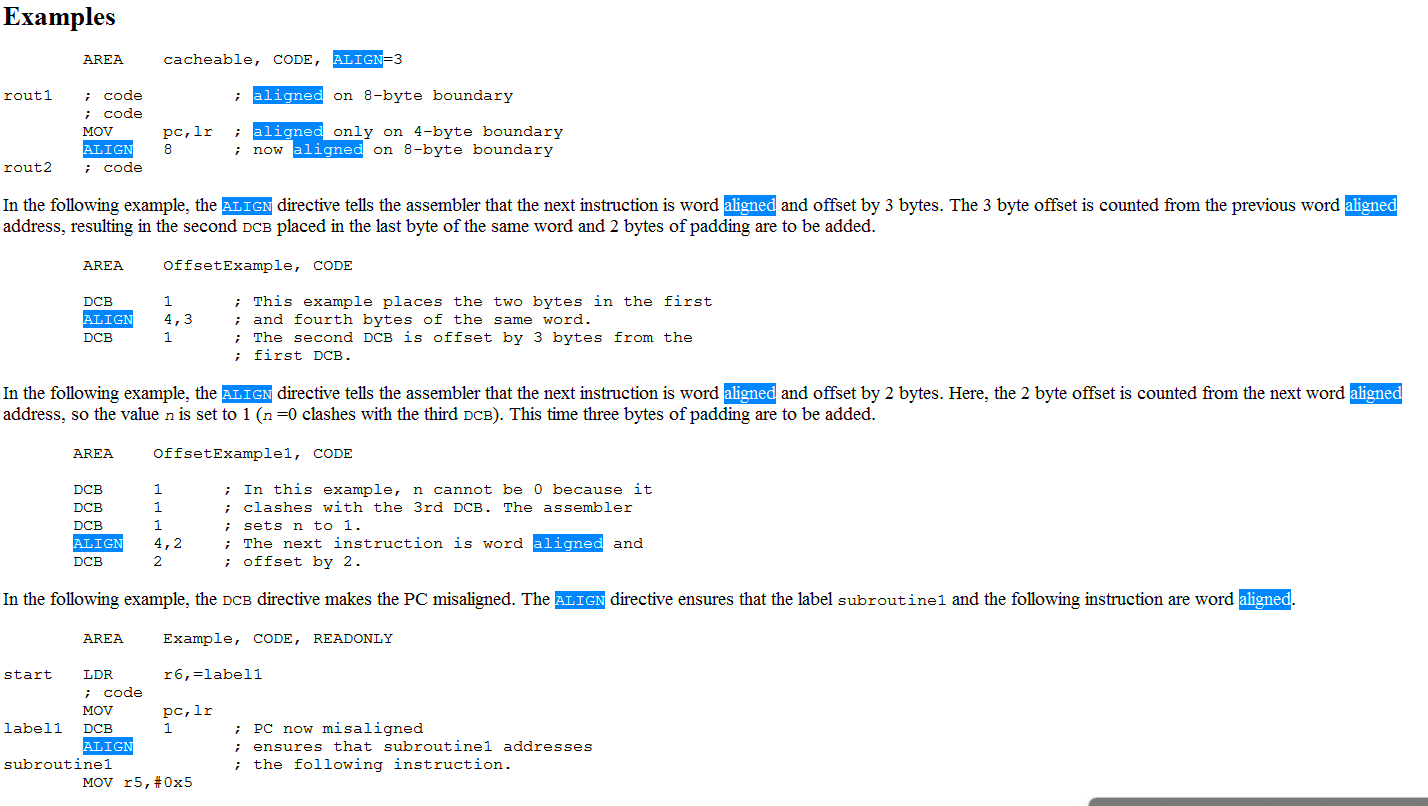
- ALIGN指令
- ALIGN手册说明
- 时钟
- 时钟系统框图
- 系统时钟配置函数 SetSysClockTo72()
- HSE配置系统时钟
- 使用HSI配置系统时钟并用MCO监控系统时钟
- 中断
- STM32中断应用概览
- 中断编程的顺序
- EXTI
- EXTI 输入线
- EXTI 框图讲解
- EXTI 结构体
- GPIO 作为 EXTI 输入线的配置
- EXTI中断实验
- 补充: 使能AFIO时钟
- SysTick
- SysTick简介
- 补充: SysTick 介绍
- SysTick 源码分析
- SysTick 实验
- 通信的基本概念
- 串行和并行通信
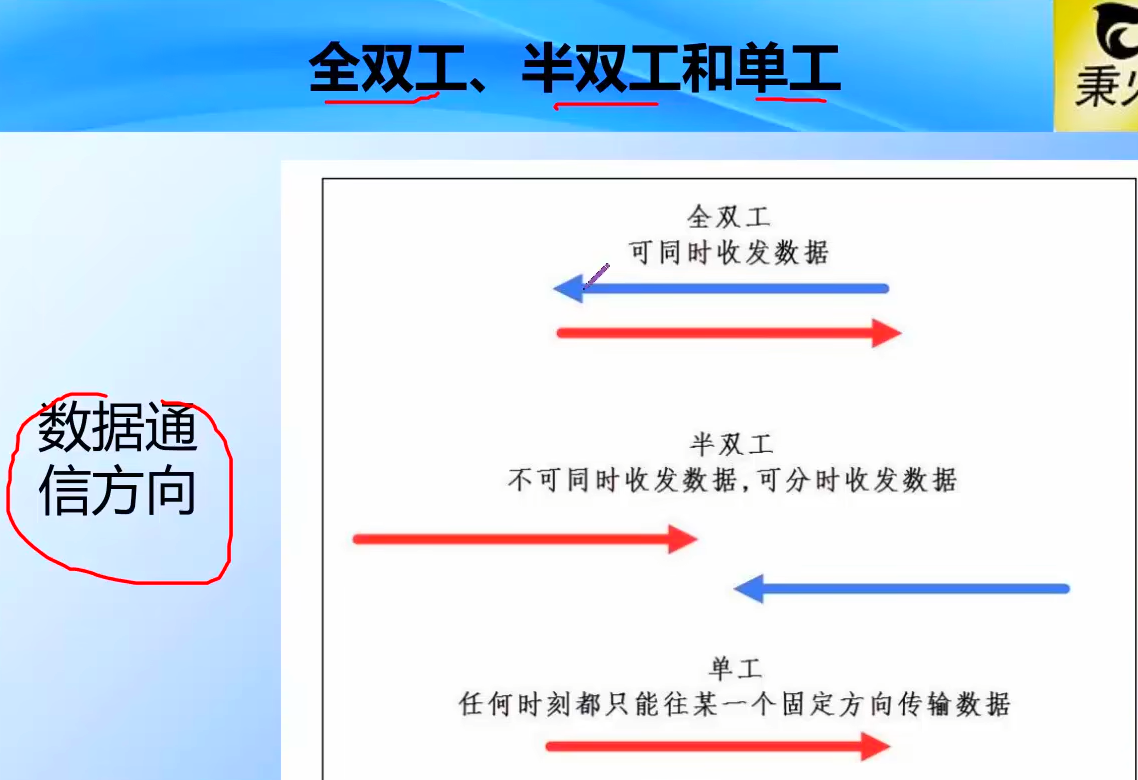
- 全双工, 半双工和单工
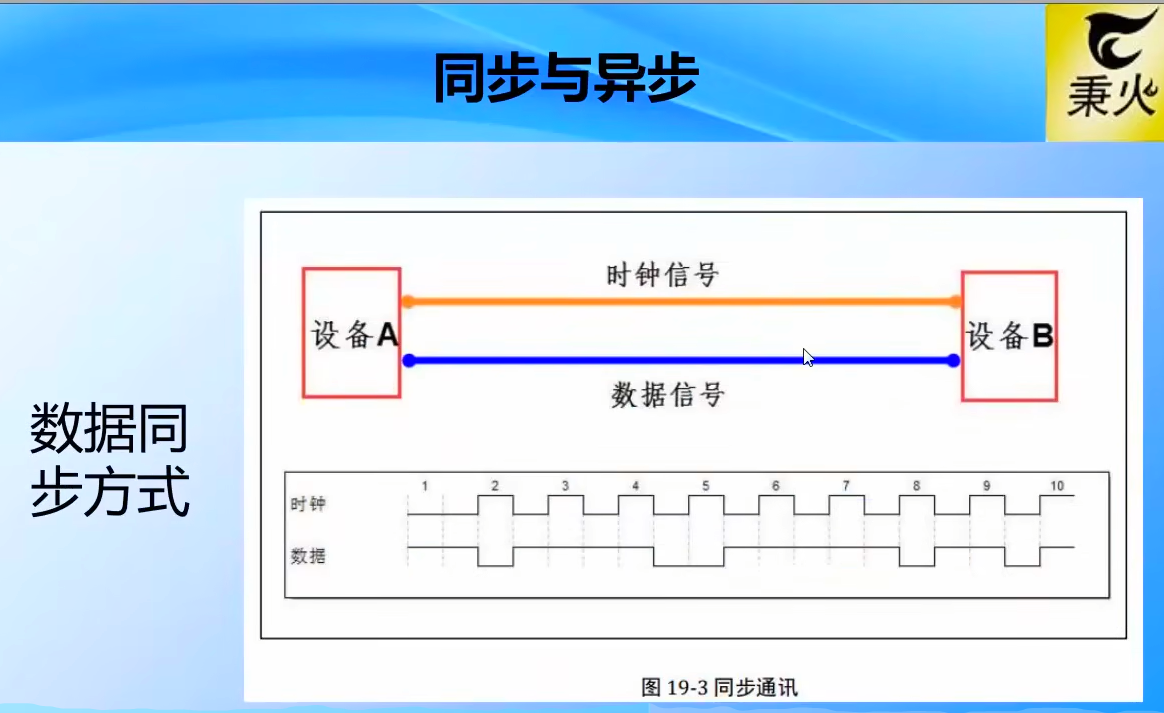
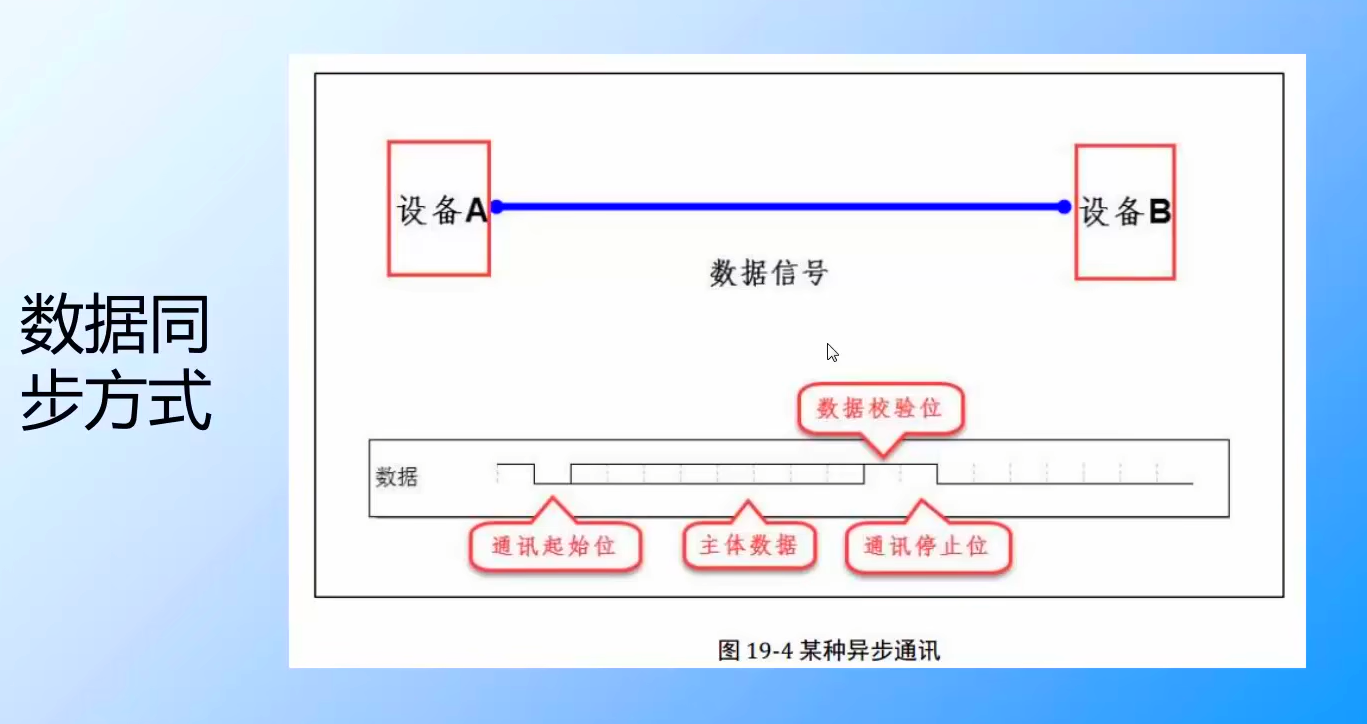
- 同步与异步
- 通信的速率
- USART-串口通信
- 串口通信协议简介
- STM32串口功能框图讲解
- 引脚部分讲解
- 数据寄存器部分
- 波特率设置
- 串口初始化结构体和固件库讲解
- USB转串口的硬件原理图
- 串口GPIO汇总
- 补充: 外设的GPIO配置
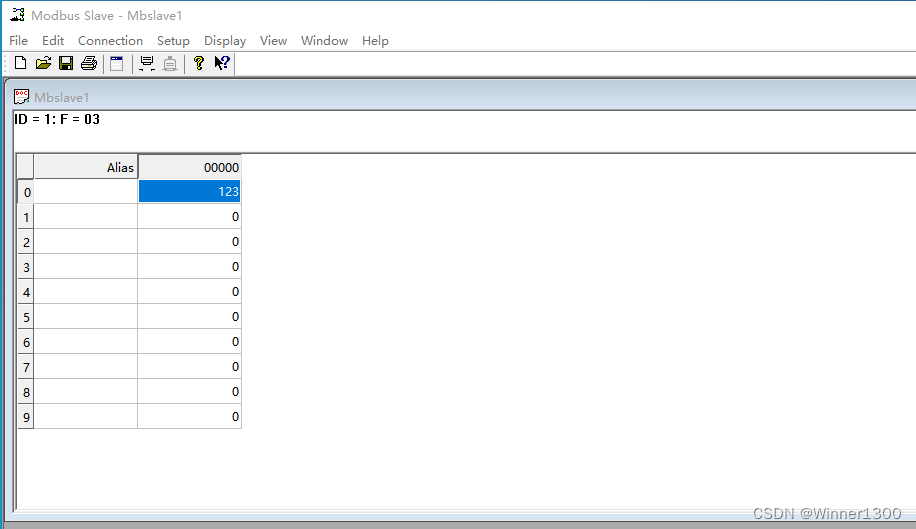
- 配置串口助手
- USART接收和发送实验
- 补充: 通过重写fputc函数重定向C库函数printf到串口
- USART控制RGB灯实验
STM32F103学习笔记
说明
CSDN中图片显示问题,会在有空的时候进行修复
本库仅供学习交流使用
- 开发板: 野火霸道V2开发板
- 编译器: ARM v5.06
- C编译版本: C99
- 固件库版本: V3.5.0
- MDK version: 538A
- 芯片包: Keil.STM32F1xx_DFP.2.4.1
- 芯片型号: STM32F103ZET6
- 参考视频: 【【单片机】野火STM32F103教学视频 (配套霸道/指南者/MINI)【全】(刘火良老师出品) (无字幕)】 https://www.bilibili.com/video/BV1yW411Y7Gw/?p=9&share_source=copy_web&vd_source=0db47c15b9f51dbaa4548ec2dc55dea4
- 仓库地址: https://github.com/See-YouL/Fire-Projects.git
基础配置
配置KeilMDK
看视频配置KeilMDK,P2
看视频配置Keil MDK
配置串口下载程序
看视频配置串口下载程序,P4
看视频配置串口下载程序
美化Keil界面
非必须步骤, 用来美化界面
使用该方案的插件
使用该方案的主题配色
配置VScode
非必须步骤, 用来使用VScode开发, 也可使用Keil MDK则不需要该步骤
方案一: 使用VScode + Keil5 MDK进行开发(主要插件Keil Assistant)
- 优点: 不需要使用Keil进行编辑
- 缺点: 不具备Debug功能,只有编译和烧录
方案一参考视频
方案二: 使用Vscode + EIDE进行开发(主要插件EIDE)
- 优点: 可在VScode中进行调试
- 缺点: 依赖Keil的编译环境
方案二参考视频
理论知识
STM32命名方式
- STM32: 32bit的MCU
- F或L: F表示基础型(Foundation)或高性能型(High-Performance), L表示低功耗型(Ultra-low-power)
- xxx: 芯片特性, 如性能级别、内存大小、特殊功能等
- 系列:
- F0, F1, F2, F3, F4, F7:这些数字代表不同的性能级别,数字越大,性能通常越高。
- L0, L1, L4, L5:这些是低功耗系列,数字越大,性能和功能通常越丰富。
- 性能级别: 通常由一到两位数字表示,如STM32F103或STM32L152。这些数字表示不同的性能级别、内存大小和外设
- 包装类型: 通常由一个字母表示,如STM32F103C8T6中的C表示LQFP48封装
- 额外特性: 如STM32F103C8T6中的8表示该芯片有64KB闪存,T表示温度范围(-40°C 到 85°C),6表示批次号或版本
例子
以 STM32F103C8T6 为例:
- STM32:STMicroelectronics的32位微控制器。
- F:Foundation系列。
- 103:该系列中的特定型号,具有特定的性能、内存和外设配置。
- C:封装类型,这里是LQFP48。
- 8:闪存大小,这里是64KB。
- T:温度范围,这里是-40°C 到 85°C。
- 6:批次号或版本。
置位与清零
- &= ~(1 << n); 将bitn清零,其他位保持不变
- |= (1 << n); 将bit n置1,其他位保持不变
GPIO
GPIO简介
GPIO(General purpose input output)通用输入输出端口的简称,软件可以控制的引脚,可输入可输出
GPIO和引脚的区别
引脚(Pin)
- 定义:引脚是指微控制器、微处理器或其他电子组件上的物理接点。它们是硬件设备的一部分,用于连接电路板、传递信号或供电。
- 通用性:引脚可以有多种功能,包括但不限于传输数据、供电、接地或作为特殊功能的接口(如模拟输入、PWM输出等)。
- 物理特性:引脚是实体的、物理存在的,可以是金属的脚或焊盘。
GPIO(General-Purpose Input/Output)
- 定义:GPIO是指在微控制器或其他数字电路设备上的一种特定类型的引脚,可以通过编程设置为输入或输出模式。
- 功能:GPIO引脚的功能非常灵活,可以用于读取数字信号(如按钮的按压)或输出数字信号(如控制LED灯的开关)。
- 编程控制:GPIO引脚的主要特点是它们可以通过软件编程来控制其行为,这使得它们非常适合于各种通用的数字输入输出任务。
区别
- 功能范围:所有GPIO都是引脚,但并非所有引脚都是GPIO。引脚是一个更广泛的概念,包括GPIO以及其他专用功能的引脚。
- 灵活性和用途:GPIO引脚特别设计用于通用的数字输入输出任务,并且它们的行为可以通过软件编程来改变。而其他类型的引脚可能有固定的功能,如电源、接地或特定的通信功能。
- 编程控制:GPIO的关键特性是它们可以被编程来执行不同的任务(输入或输出),而其他类型的引脚可能不具备这种灵活性。
总的来说,GPIO是引脚的一个子集,专门用于可编程的通用数字输入输出任务。而引脚是一个更广泛的概念,涵盖了电子设备上的所有物理接点。
引脚的分类
GPIO 框图讲解
保护二极管

- 如果引脚电压大于VDD则上面的保护二极管导通,防止高电压进入芯片内部,如果电压过高则会烧坏二极管进而烧坏芯片
- 如果引脚电压低于VSS则下面的保护二极管导通,保护芯片
推挽输出
推挽输出部分的INT来自ODR寄存器
若ODR为1, 经过反相器后为0, 此时PMOS和NMOS的Ug=0V
对于PMOS, Us=3.3V > Ug=0V, PMOS管导通, OUT=VDD
对于NMOS, Us=0V = Ug=0V, 简单认为, NMOS管截止
若ODR为0,经过反相器后为1, 此时PMOS和NMOS的Ug=3.3V
对于PMOS, Us=3.3V = Ug=3.3V, 简单认为, PMOS管截止
对于NMOS, Us=0V < Ug=3.3V, NMOS管导通, OUT=GND=0V
推挽输出的含义
- PMOS导通时, OUT处电流向外称为推, 此时电流称为灌电流
- NMOS导通时, OUT处电流向里称为挽, 此时电流称为拉电流
推挽输出(Push-Pull Output)是一种常见的电子电路输出类型,特别是在数字电路和微控制器的GPIO(通用输入/输出)引脚中。这种输出类型的主要特点是它使用两个晶体管(一个N型和一个P型)来控制输出引脚的电压状态。
原理
在推挽配置中,通常有两个晶体管:
- N型晶体管:当被激活(或导通)时,它将输出引脚连接到地(GND),从而产生低电平(0)输出。
- P型晶体管:当被激活时,它将输出引脚连接到正电源(VCC),从而产生高电平(1)输出。
这两个晶体管不会同时导通,以避免短路。在任何给定的时刻,要么N型晶体管导通将输出拉低,要么P型晶体管导通将输出拉高。
特点
- 强驱动能力:推挽输出可以提供较强的电流驱动能力,无论是向输出引脚提供电流(高电平)还是从引脚吸收电流(低电平)。
- 确定的逻辑状态:输出要么明确地是高电平,要么是低电平,不会处于悬空(高阻态)状态。
- 无需外部上拉或下拉电阻:由于推挽输出自身就可以明确地驱动高电平或低电平,因此不需要外部的上拉或下拉电阻来确保稳定的输出状态。
应用
推挽输出广泛应用于各种数字电路,特别是在需要驱动LED、继电器或其他需要较高电流的负载时。由于其强大的驱动能力和清晰的逻辑电平,推挽输出是实现数字信号传输的理想选择。
对比开漏(Open-Drain)/开集(Open-Collector)
与推挽输出相对的是开漏(在MOSFET技术中)或开集(在双极晶体管技术中)输出,这种类型的输出只有一个晶体管,要么将输出拉低,要么让它悬空(高阻态)。开漏/开集输出需要外部上拉电阻来确保高电平状态,常用于需要多个设备共享同一输出线的应用,如I2C通信协议。
开漏输出
内部只能输出低电平,不能输出高电平

ODR=1, 经反相器为0, Vg=0V=Vs=0V, NMOS管截止, 此时OUT为高阻态悬空, 加入外部上拉电阻后, OUT=1
如果外部需要高电平驱动可以通过更换外部上拉电路来进行更换
ODR=0, 经反相器为1, Vg=1 > Vs=0, NMOS管导通, 此时OUT=0V
开漏输出(Open-Drain Output,在使用MOSFET技术的情况下称为开漏,而在使用双极性晶体管的情况下称为开集(Open-Collector)输出)是一种常见的电子电路设计,特别是在数字电路和微控制器的GPIO(通用输入/输出)引脚中。这种输出类型的主要特点是它使用单个晶体管来控制输出引脚的电压状态,而不是像推挽输出那样使用两个晶体管。
开漏输出的原理
在开漏配置中,只有一个N型晶体管:
- N型晶体管:当晶体管导通(激活)时,它将输出引脚连接到地(GND),产生低电平(0)输出。当晶体管关闭(非激活)时,输出引脚不连接到任何东西,处于悬空状态。
- 由于输出在晶体管关闭时处于悬空状态,因此通常需要一个外部的上拉电阻连接到正电源(VCC),以确保当晶体管关闭时输出能够达到高电平(1)。
特点
- 单向驱动能力:开漏输出只能将输出拉低,不能主动驱动高电平。
- 需要外部上拉电阻:为了确保输出能够达到高电平,需要外部上拉电阻。
- 适合于总线和共享线路:开漏输出非常适合于多个设备共享同一输出线的应用,因为任何一个设备都可以将线路拉低,而不会对其他设备造成干扰。
应用
开漏输出常用于需要多个设备共享同一通信线路的场合,如I2C和1-Wire通信协议。在这些应用中,多个设备可以连接到同一条线路上,每个设备都可以通过将线路拉低来发送信号,而不会影响其他设备。
对比推挽输出
与开漏输出相对的是推挽输出,后者使用两个晶体管(一个N型和一个P型)来分别驱动高电平和低电平。推挽输出可以主动驱动高电平和低电平,而开漏输出只能驱动低电平,需要外部上拉电阻来实现高电平状态。
补充: 高阻态与悬空
高阻态(High-Impedance State),通常简称为Hi-Z,是电子电路中的一个术语,用来描述一个电路节点在特定条件下呈现出非常高电阻的状态。在这种状态下,电路节点既不明显地连接到电源(高电平),也不明显地连接到地(低电平)。换句话说,这个节点处于一种“断开”或“浮空”的状态,对电路中的其他部分几乎没有任何电气影响。
高阻态的应用
- 三态逻辑(Tri-state Logic):在数字电路中,高阻态常用于三态逻辑,允许多个输出连接到同一个线路或总线上,而不会相互干扰只有被选中的设备会将其输出置于低电阻状态(高电平或低电平),其他设备的输出则处于高阻态。
- 总线系统:在微处理器、微控制器和其他数字系统的总线(如数据总线、地址总线)上,高阻态用于控制哪个设备可以在特定时刻向总线发送数据。
- 输入/输出端口:在可编程的微控制器的GPIO(通用输入/输出)端口中,高阻态可以用来防止未使用的或被配置为输入的端口对电路造成影响。
高阻态的重要性
- 避免冲突:在多个设备共享同一通信线路时,高阻态可以防止输出冲突。
- 节能:当端口处于高阻态时,它几乎不消耗电流,有助于降低功耗。
- 灵活性:高阻态提供了电路设计的灵活性,特别是在需要多个设备共享同一资源的情况下。
注意事项
- 浮动电压:当一个端口或线路处于高阻态时,它可能会因为电磁干扰或静电感应而捕获不确定的电压,有时可能需要通过上拉或下拉电阻来确保稳定的逻辑状态。
- 设计考虑:在设计电路和编写程序时,需要考虑到高阻态的影响,确保在适当的时候启用或禁用高阻态。
在电子电路中,“悬空”(Floating)是指一个电路节点没有被明确连接到电源(高电平)或地(低电平),也没有通过任何电阻或其他电子元件连接到其他电路节点的状态这种状态下的节点电压是不确定的,因为它既不是被固定在逻辑高也不是逻辑低,而是可以随外部电磁场或附近电路的状态变化而变化。
悬空状态的特点
- 不确定的电压:悬空的节点可能会随机地捕获周围环境的电磁干扰,导致其电压处于不确定的状态。
- 易受干扰:由于没有明确的电气连接,悬空的节点容易受到外部电磁干扰的影响。
- 可能导致问题:在数字电路中,悬空的输入引脚可能导致不稳定的逻辑状态,从而引发电路的不可预测行为。
高阻态与悬空的关系
高阻态是一种特定的电路配置,其中一个节点(如微控制器的GPIO引脚)被设置为非常高的电阻状态。这意味着该节点对电路的其他部分几乎没有电气影响,类似于断开连接因此,当一个引脚被设置为高阻态时,它实际上是在悬空状态,因为它既不是明确地连接到高电平也不是低电平。
区别和联系
- 联系:高阻态通常会导致节点悬空当一个节点处于高阻态时,由于其极高的电阻值,它实际上与电路的其他部分隔离,从而处于悬空状态。
- 区别:高阻态是一种有意设置的电路状态,用于特定的目的(如防止总线冲突)。而悬空可能是无意的,可能是由于设计不当或电路未完成造成的。
注意事项
- 设计考虑:在设计电子电路和系统时,应避免输入引脚悬空,因为这可能导致不稳定的行为。通常使用上拉或下拉电阻来确保这些引脚有一个确定的逻辑状态。
- 高阻态应用:在某些情况下,如多个设备共享一个通信总线,高阻态是必要的,以确保只有一个设备在任何时刻控制总线。
复用功能输出

通过片上外设如EXTI到引脚输出
输入模式
ISR读出
I/O引脚至上拉/下拉输入(通过BSRR寄存器软件配置), 经TTL肖特基触发器(>2V <1.2V), 至IDR寄存器读出
复用功能输入

以EXTI为例,RX数据经由TTL肖特基触发器到DR寄存器
模拟输入

不经过TTL肖特基触发器直接被读出
GPIO框图对应寄存器

- 2部分: 推挽,开漏输出对应CRL,CRH寄存器
- 3部分: 输出数据寄存器对应ODR; 位设置/清除寄存器对应BSRR
- 上拉/下拉输入: 对应CRL,CRH,具体选择上拉还是下拉需要软件配置BSRR
- 5部分: 输入数据寄存器对应IDR
GPIO输出初始化顺序
- 时钟使能
- 选择具体的GPIO
- 配置GPIO的工作模式(CRL CRH)
- 控制GPIO输出高低电平(ODR,BRR和BSRR)
手写库
通过地址使用寄存器
项目地址: REG-LED
main.c中的主要代码
*(unsigned int *)(0x40021018) |= ((1) << 3); // RCC_APB2ENR的bit3置1
/*----------------------------------------------------------------
开启GPIOB的时钟
GPIOB挂载在APB2总线
RCC_APB2ENR的偏移量为0x18
RCC的基地址为0x40021000
RCC_APB2ENR的bit3为IOPBEN(IO端口B时钟使能) 1开启
****************************************************************************/
*(unsigned int *)(0x40010C00) |= ((1) << (4*0)); // GPIOB_CRL的bit4-0置0001
/*----------------------------------------------------------------
将GPIOB设置为推挽输出
GPIOB 基地址 0x40010C00
GPIOx_CRL 偏移量 00h
bit1-0: 01 输出模式,最大速度10MHz
bit4-3: 00 通用推挽输出模式
((1) << (4*0)) // 若修改PB1则为(4*1)
****************************************************************************/
*(unsigned int *)(0x40010C0C) &= ~(1<<0); // GPIOB_ODR的bit0置0
/*----------------------------------------------------------------
修改PB0为1
GPIOB 基地址 0x40010C00
GPIOx_ODR 偏移量 0Ch
****************************************************************************/
通过头文件定义使用寄存器
项目地址: REG-LED-Register
确定总线基地址, 其中AHB的基地址是从DMA1开始的,即从0x40020000开始
定义在stm32f10x.h中
// 存放stm32寄存器映射的代码
// 外设 Peripheral
#define PERIPH_BASE ((unsigned int)0x40000000)
#define APB1PERIPH_BASE (PERIPH_BASE) // 从TIM2开始
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000) // 从AFIO开始
#define AHBPERIPH_BASE (PERIPH_BASE + 0x20000) // 从DMA1开始
// RCC
#define RCC_BASE (AHBPERIPH_BASE + 0x1000) // RCC基地址
// GPIOB
#define GPIOB_BASE (APB2PERIPH_BASE + 0x0C00) // GPIOB基地址
// 定义寄存器
#define RCC_APB2ENR (*(volatile unsigned int *)(RCC_BASE + 0x18)) // APB2外设时钟使能寄存器
#define GPIOB_CRL (*(volatile unsigned int *)(GPIOB_BASE + 0x00))// GPIOB_CRL
#define GPIOB_CRH (*(volatile unsigned int *)(GPIOB_BASE + 0x04)) // GPIOB_CRH
#define GPIOB_ODR (*(volatile unsigned int *)(GPIOB_BASE + 0x0C)) // GPIOB_CRH
在main.c中的主函数代码改为
RCC_APB2ENR |= ((1) << 3); // 开启GPIOB的时钟
GPIOB_CRL &= ~((0x0F) << (4*0)); // 将GPIOB状态清零
GPIOB_CRL |= ((1) << (4*0)); // 将GPIOB设置为推挽输出
GPIOB_ODR &= ~(1<<0); // PB0置0
补充: 关键字volatile的作用
在C语言中,尤其是在嵌入式领域,volatile 关键字用于告诉编译器,定义为 volatile 的变量可能会以编译器不可预知的方式被改变。这意味着编译器在处理这些变量时,应避免进行某些优化,确保每次访问都直接从内存中读取变量的值。
含义
当一个变量被声明为 volatile 时,编译器会对该变量的处理方式做出以下调整:
- 防止优化:编译器不会对这些变量进行优化,这可能包括消除看似多余的读取或写入操作。
- 直接访问:每次访问 volatile 变量时,都会直接从其内存地址读取数据,而不是使用可能存储在寄存器中的副本。
应用场景
在嵌入式编程中,volatile 关键字的使用场景主要包括:
- 硬件寄存器访问:当编程与硬件寄存器交互时,如读取一个传感器的数据寄存器或写入一个控制寄存器。这些寄存器的值可能会在任何时候改变,因此需要使用 volatile 来确保每次读取或写入都是最新的值。
- 中断服务例程:在中断服务例程(ISR)中使用的变量,这些变量可能在ISR中被改变,并在程序的其他部分被访问。使用 volatile 可以确保主程序中的代码能够看到在ISR中对这些变量所做的更改。
- 多线程和并发:在多线程或并发环境中,一个线程可能修改另一个线程正在访问的变量。volatile 确保每个线程都能访问到最新的值。
注意事项
- 不是并发解决方案:volatile 关键字不能替代互斥锁或其他并发控制机制。它不保证操作的原子性或内存可见性。
- 性能影响:由于 volatile 防止了某些优化,过度使用它可能会降低程序的性能。
- 正确使用:只有在上述特定场景中才应使用 volatile。错误地使用 volatile 可能会导致难以发现的错误。
通过结构体操作寄存器
项目地址: FWlib-LED
在stm32f10x.h中添加结构体定义(主要代码)
// 定义结构体
typedef unsigned int uint32_t;
typedef unsigned short uint16_t;
typedef struct
{
uint32_t CRL;
uint32_t CRH;
uint32_t IDR;
uint32_t ODR;
uint32_t BSRR;
uint32_t BRR;
uint32_t LCKR;
}GPIO_TypeDef;
#define GPIOB ((GPIO_TypeDef *)GPIOB_BASE) // 使用GPIOB->访问成员变量
/*----------------------------------------------------------------
若定义为 #define GPIOB (*(GPIO_TypeDef *)(GPIOB_BASE))
则使用GPIOB.XXX来访问成员变量
----------------------------------------------------------------*/
在main.c中使用GPIOB->XXX的方式来访问结构体成员(即寄存器), 主要代码如下
GPIOB->CRL &= ~((0x0F) << (4*1)); // 将GPIOB状态复位
GPIOB->CRL |= ((1) << (4*1)); // 将GPIOB设置为推挽输出
GPIOB->ODR &= ~(1<<0); // PB0置0
在stm32f10x.h中增加RCC的结构体定义,如下
typedef struct
{
uint32_t CR;
uint32_t CFGR;
uint32_t CIR;
uint32_t APB2RSTR;
uint32_t APB1RSTR;
uint32_t AHBENR;
uint32_t APB2ENR;
uint32_t APB1ENR;
uint32_t BDCR;
uint32_t CSR;
uint32_t AHBRSTR;
uint32_t CFGR2;
}RCC_Typedef;
#define RCC ((RCC_Typedef*)RCC_BASE) // 使用RCC->访问成员变量
/*----------------------------------------------------------------
若定义为 #define RCC (*(RCC_Typedef*)RCC_Base)
则使用RCC.XXX来访问成员变量
----------------------------------------------------------------*/
在main.c中通过结构体访问RCC寄存器,代码如下
RCC->APB2ENR |= ((1) << 3); // 开启GPIOB的时钟
更换LED说明
由于我的开发板,PB0总是点亮蓝灯(本应该是绿灯), 以后的测试换为测试蓝灯,PB0换为PB1进行测试
增加端口置位/复位函数
项目地址: FWlib-LED
增加stm32f10x_gpio.c和stm32f10x_gpio.h文件
在stm32f10x_gpio.c中,增加置位/复位函数,如下
#include "stm32f10x_gpio.h"
// 端口置位函数
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t Pin)
{
GPIOx->BSRR |= Pin;
/*----------------------------------------------------------------
BSRR寄存器:
低16位写1置1,写0不改变
高16位写1置0,写0不改变
*----------------------------------------------------------------*/
}
// 端口复位函数
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t Pin)
{
GPIOx->BRR |= Pin;
/*----------------------------------------------------------------
BRR寄存器:
低16位写1置0,写0不改变
高16位保留
----------------------------------------------------------------*/
}
在stm32f10x_gpio.h中, 添加16位PIN置1的宏定义,端口置位/复位函数的声明
#ifndef __STM32F10X_GPIO_H
#define __STM32F10X_GPIO_H
#include "stm32f10x.h"
// 宏定义端口
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< 选择Pin0 */ //(00000000 00000001)b
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< 选择Pin1 */ //(00000000 00000010)b
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< 选择Pin2 */ //(00000000 00000100)b
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< 选择Pin3 */ //(00000000 00001000)b
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< 选择Pin4 */ //(00000000 00010000)b
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< 选择Pin5 */ //(00000000 00100000)b
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< 选择Pin6 */ //(00000000 01000000)b
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< 选择Pin7 */ //(00000000 10000000)b
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< 选择Pin8 */ //(00000001 00000000)b
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< 选择Pin9 */ //(00000010 00000000)b
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< 选择Pin10 */ //(00000100 00000000)b
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< 选择Pin11 */ //(00001000 00000000)b
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< 选择Pin12 */ //(00010000 00000000)b
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< 选择Pin13 */ //(00100000 00000000)b
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< 选择Pin14 */ //(01000000 00000000)b
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< 选择Pin15 */ //(10000000 00000000)b
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< 选择全部引脚*/ //(11111111 11111111)b
/*----------------------------------------------------------------
对于类似于GPIOx_BSRR, GPIOx_BRR寄存器通过写1来进行置位/复位操作的寄存器来说
宏定义16位端口的1值很有必要
----------------------------------------------------------------*/
// 函数声明
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t Pin);
#endif // !__STM32F10X_GPIO
在main.c函数中使用置位/复位函数
// 增加复位/置位函数
RCC->APB2ENR |= ( (1) << 3 );
GPIOB->CRL &= ~( (0x0f) << (4*0) );
GPIOB->CRL |= ( (1) << (4*0) );
GPIO_SetBits(GPIOB,GPIO_Pin_1);
GPIO_ResetBits( GPIOB,GPIO_Pin_1 );
补充: 在C语言中#ifndef的作用
在C语言中,#ifndef 是一种预处理指令,用于条件编译。它的全称是 “if not defined”,意思是“如果没有定义”。#ifndef 通常与 #define 和 #endif 一起使用,用于防止头文件的内容被多次包含(重复包含)。
作用
#ifndef 的主要作用是确保一个头文件中的内容只被包含一次,防止因重复包含同一头文件而导致的编译错误这种技术被称为“包含卫士”(Include Guards)或“头文件卫士”(Header Guards)。
使用方式
一个典型的使用 #ifndef 的例子如下:
// 假设这是一个头文件 example.h
#ifndef EXAMPLE_H // 如果没有定义 EXAMPLE_H
#define EXAMPLE_H // 定义 EXAMPLE_H
// 头文件的内容
void someFunction();
// 更多的声明...
#endif // 结束 #ifndef
在这个例子中:
- 当编译器首次遇到 example.h 时,EXAMPLE_H 还没有被定义,所以编译器会处理 #define EXAMPLE_H 和随后的头文件内容。
- 如果同一源文件或其他包含了 example.h 的文件再次尝试包含 example.h,EXAMPLE_H 已经被定义了,因此 #ifndef EXAMPLE_H 条件失败,编译器将跳过文件的其余部分,防止重复包含。
重要性
在C语言项目中,特别是在大型项目中,头文件经常被多个源文件包含,或者一个头文件包含其他头文件。如果没有包含卫士,头文件中的定义(如函数声明、宏定义、类型定义等)可能会被重复包含,导致编译错误(如重复定义错误)。使用 #ifndef 可以有效地避免这种情况。
解决stm32f10x.h重复定义
在stm32f10x.h中增加#ifndef, 如下
#ifndef __STM32F10X_H
#define __STM32F10X_H
// 中间代码省略
#endif // !__STM32F10X_H
补充: #ifndef格式问题
在C语言中,当使用 #ifndef(和 #define、#endif)作为头文件的包含卫士时,通常会在文件名前加上双下划线 __ 或其他类似的前缀/后缀,这是一种非正式的约定,用于减少命名冲突的风险然而,需要注意的是,使用双下划线作为前缀或后缀在某些情况下可能并不是最佳实践。
原因
- 唯一性:在大型项目中,可能会有许多不同的头文件。使用文件名作为宏的一部分可以帮助确保每个包含卫士的宏是唯一的。
- 减少冲突:添加额外的字符(如双下划线)可以进一步减少不同头文件之间宏名称冲突的可能性。
注意事项
保留标识符:根据C和C++标准,以双下划线开头或以单下划线后跟大写字母开头的标识符是保留给实现(编译器和标准库)使用的。因此,使用这样的标识符作为宏名称可能会导致与标准库或编译器的内部标识符冲突。
建议的做法:更安全的做法是使用文件名的大写形式加上一个后缀(如 _H),而不是使用双下划线。例如,对于 example.h 头文件,可以使用 EXAMPLE_H 作为包含卫士的宏。
示例
#ifndef EXAMPLE_H // 更安全的做法
#define EXAMPLE_H
// 头文件内容
#endif // EXAMPLE_H
总之,虽然在文件名前加上双下划线是一种常见做法,但为了避免与编译器或标准库的内部标识符冲突,建议使用其他方法来确保宏名称的唯一性和安全性。
增加GPIO初始化结构体
项目地址: FWlib-LED
配置GPIO工作模式的宏定义(GPIOMode_TypeDef)参考下图
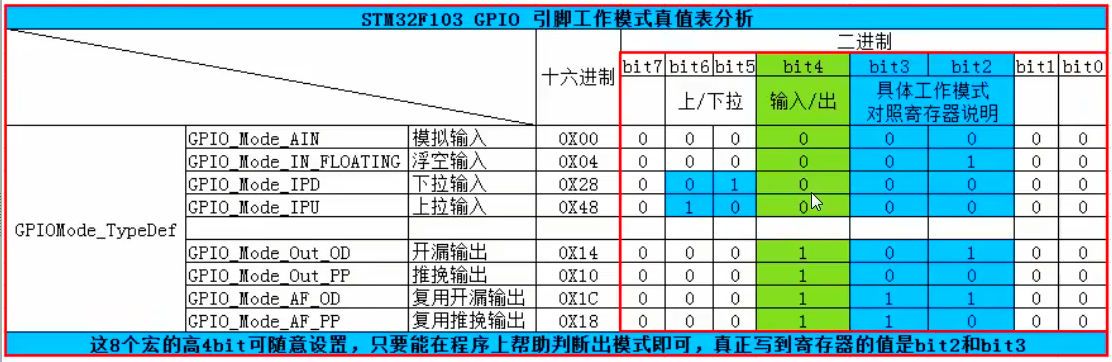
实际写入寄存器的是bit3-0,bit7-4并不写入寄存器
勘误:上拉输入和下拉输入两行的bit3-2应该为10
- bit1-0: 置0, 配置输出速度,通过GPIOSpeed_TypeDef进行覆盖配置
- bit3-2: 配置输入/输出模式
- bi4: 不写入寄存器, 用来标志是输入还是输出
- bit6-5: 不写入寄存器, 用来判断是上拉输入还是下拉输入
- bit7: 不写入寄存器
在stm32f10x_gpio.h中增加宏定义
// 通过枚举 限定GPIO_Speed的选择
typedef enum
{
GPIO_Speed_10MHZ = 1, // 01 输出模式,最大速度10MHz
GPIO_Speed_2MHZ, // 10 输出模式,最大速度2MHz
GPIO_Speed_50MHZ // 11 输出模式,最大速度50MHz
}GPIOSpeed_TypeDef;
// 通过枚举限定GPIO_Mode的选择
typedef enum
{ GPIO_Mode_AIN = 0x0, // 模拟输入 (0000 0000)b
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入 (0000 0100)b
GPIO_Mode_IPD = 0x28, // 下拉输入 (0010 1000)b
GPIO_Mode_IPU = 0x48, // 上拉输入 (0100 1000)b
GPIO_Mode_Out_OD = 0x14, // 开漏输出 (0001 0100)b
GPIO_Mode_Out_PP = 0x10, // 推挽输出 (0001 0000)b
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出 (0001 1100)b
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出 (0001 1000)b
}GPIOMode_TypeDef;
// 定义GPIO初始化结构体
typedef struct
{
uint16_t GPIO_Pin;
uint16_t GPIO_Speed;
uint16_t GPIO_Mode;
}GPIO_InitTypeDef;
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
在stm32f10x_gpio.c中写入GPIO初始化函数(从库函数中复制)
// GPIO初始化函数
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00;
/*---------------------- GPIO 模式配置 --------------------------*/
// 把输入参数GPIO_Mode的低四位暂存在currentmode
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);
// bit4是1表示输出,bit4是0则是输入
// 判断bit4是1还是0,即首选判断是输入还是输出模式
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
// 输出模式则要设置输出速度
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*-------------GPIO CRL 寄存器配置 CRL寄存器控制着低8位IO- -------*/
// 配置端口低8位,即Pin0~Pin7
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
// 先备份CRL寄存器的值
tmpreg = GPIOx->CRL;
// 循环,从Pin0开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
// pos的值为1左移pinpos位
pos = ((uint32_t)0x01) << pinpos;
// 令pos与输入参数GPIO_PIN作位与运算,为下面的判断作准备
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;
//若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
// pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << 2;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
// 把前面处理后的暂存值写入到CRL寄存器之中
GPIOx->CRL = tmpreg;
}
/*-------------GPIO CRH 寄存器配置 CRH寄存器控制着高8位IO- -----------*/
// 配置端口高8位,即Pin8~Pin15
if (GPIO_InitStruct->GPIO_Pin > 0x00FF)
{
// // 先备份CRH寄存器的值
tmpreg = GPIOx->CRH;
// 循环,从Pin8开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = (((uint32_t)0x01) << (pinpos + 0x08));
// pos与输入参数GPIO_PIN作位与运算
currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos);
//若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
//pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << 2;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
}
}
// 把前面处理后的暂存值写入到CRH寄存器之中
GPIOx->CRH = tmpreg;
}
}
在main.c中使用GPIO初始化函数
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHZ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
增加宏定义来增强代码可移植性
项目地址: FWlib-LED
在main.c中增加宏定义
#define LED_B_GPIO_PORT GPIOB
#define LED_B_GPIO_CLK_ENABLE (RCC->APB2ENR |= ((1) << 3))
#define LED_B_GPIO_PIN GPIO_Pin_0
在main.c中增加延时函数,实现LED闪烁
void Delay(uint32_t count)
{
for( ; count != 0; count-- )
{
;
}
}
在main.c中使用宏定义后的代码实现LED闪烁
// 增加宏定义以增强代码可移植性
LED_B_GPIO_CLK_ENABLE;
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = LED_B_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHZ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
while(1)
{
GPIO_SetBits(LED_B_GPIO_PORT, LED_B_GPIO_PIN); // PB1置1 蓝灯灭
Delay(0xFFFF);
GPIO_ResetBits(LED_B_GPIO_PORT, LED_B_GPIO_PIN); // PB1置0 蓝灯亮
Delay(0xFFFF);
}
固件库编程
STM32固件库文件分析
- 汇编编写的启动文件 startup_stm32f10x_h.s: 设置堆栈指针,设置PC指针,初始化中断向量表,配置系统时钟,调用C库函数_main最终去C的世界
- 时钟配置文件 system_stm32f10x.c: 把外部时钟HSE=8M,经过PLL倍频成72M
- 外设相关
- stm32f10x.h: 实现了内核之外的外设的寄存器映射
- xx: GPIO, USART, I2C,
- stm32f10x_xx.c: 外设的驱动函数库文件
- stm32f10x_xx.h: 存放外设的初始化结构体,外设初始化结构体成员的参数列表,外设固件库的头文件声明
- 内核相关
- CMSIS: Cortex微控制器软件接口标准
- core_cm3.h: 实现了内核里面外设的寄存器映射
- core_cm3.c: 内核外设的驱动固件库
- NVIC(嵌套向量中断控制器), SysTick(系统滴答定时器), misc.h, misc.c
- 头文件的配置文件 stm32f10x_conf.h里面包含
- stm32f10x_usart.h
- stm32f10x_i2c.h
- stm32f10x_spi.h
- stm32f10x_adc.h
- stm32f10x_fsmc.h
- 专门存放终端服务函数的C文件(可以放在其他地方,不一定要放在stm32f10x_it.c中)
- stm32f10x_it.c
- stm32f10x_it.h
新建固件库版本工程
项目地址: Fwlib-Template
- Doc: 用来存放程序说明的文件,由写程序的人添加
- Libraries: 存放库文件
- Project: 存放工程
- User: 用户编写的驱动文件
其余按照视频配置,P18, 视频链接: 按照P18进行库移植
GPIO输出-使用固件库点亮LED
项目地址: 12-GPIO输出-使用固件库点亮LED
在User目录下新建led文件夹,添加bsp_led.c和bsp_led.h
在bsp_led.h中添加所使用的宏定义和函数声明
#ifndef __BSP_LED_H
#define __BSP_LED_H
#include "stm32f10x.h"
// 宏定义
#define LED_B_GPIO_PIN GPIO_Pin_1 // stm32f10x_gpio.h中定义
#define LED_B_GPIO_PORT GPIOB // stm32f10x.h中定义
#define LED_B_GPIO_CLK RCC_APB2Periph_GPIOB
// 函数声明
void LED_GPIO_Config(void);
#endif // !__BSP_LED_H
在bsp_led.c中添加初始化函数
// bsp: board support package 板级支持包
#include "bsp_led.h"
void LED_GPIO_Config(void)
{
RCC_APB2PeriphClockCmd(LED_B_GPIO_CLK, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = LED_B_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(LED_B_GPIO_PORT, &GPIO_InitStruct);
}
在main.c中调用初始化函数,并进行软件延时,实现LED闪烁
#include "stm32f10x.h"
#include "bsp_led.h"
void Delay(uint32_t count)
{
for( ; count != 0; count--)
{
uint32_t current;
for(current = count; current != 0; current--)
{
;
}
}
}
int main(void)
{
LED_GPIO_Config();
while(1)
{
GPIO_SetBits(LED_B_GPIO_PORT, LED_B_GPIO_PIN);
Delay(0xFFF); // 延时
GPIO_ResetBits(LED_B_GPIO_PORT, LED_B_GPIO_PIN);
Delay(0xFFF); // 延时
}
}
增加函数宏定义
在bsp_led.h中增加如下代码:
#define ON 1
#define OFF 0
#define LED_B(a) if (a)\
GPIO_ResetBits(LED_B_GPIO_PORT, LED_B_GPIO_PIN); \
else\
GPIO_SetBits(LED_B_GPIO_PORT, LED_B_GPIO_PIN);
// 使用\可以进行换行,其后不能跟空格,\后应该直接回车
在main.c中使用宏定义的函数
LED_B(OFF);
Delay(0xFFF); // 延时
LED_B(ON);
Delay(0xFFF); // 延时
使用\的注意事项
在C语言中使用反斜杠 \ 进行换行时,确实有一些需要注意的事项。这种用法通常出现在宏定义或是将长代码行分割为多行以提高代码的可读性。正确使用时,\ 应该放在行尾,紧接着是换行符。
注意事项
- 无空格:在行尾使用 \ 时,它之后直到行末不能有任何字符,包括空格或制表符。任何在 \ 之后的空格都会使得换行转义失效,导致编译错误。
- 紧跟换行符:\ 应该直接紧跟换行符。这告诉编译器忽略换行符,将下一行视为当前行的延续。
- 可读性:虽然使用 \ 可以将长代码行分割为多行,但过度使用可能会降低代码的可读性。适当使用,以保持代码整洁和可维护。
- 宏定义中的使用:在宏定义中使用 \ 进行换行是常见的做法,因为宏定义必须是单行的。在这种情况下,确保每一行(除了最后一行)都以 \ 结尾。
示例
正确的使用:
#define MY_MACRO(a, b) \
do { \
a = 2; \
b = 3; \
} while(0)
int main() {
int x, y;
MY_MACRO(x, y);
return 0;
}
在这个例子中,宏 MY_MACRO 被分成了多行,每行的末尾都使用了 \ 来实现。
错误的使用(如果 \ 后有空格):
#define MY_MACRO(a, b) \
do { \
a = 2; \
b = 3; \
} while(0)
在这个错误的例子中,第一行的 \ 后面如果有空格,将导致编译错误。
总之,当在C语言中使用 \ 进行换行时,确保 \ 是每行的最后一个字符,并且紧接着换行符,以避免编译错误并保持代码的清晰
GPIO输入
项目地址: 13-GPIO输入-按键检测
通过原理图可知KEY1接PA0口, 按键按下后为高电平, 原理图如下
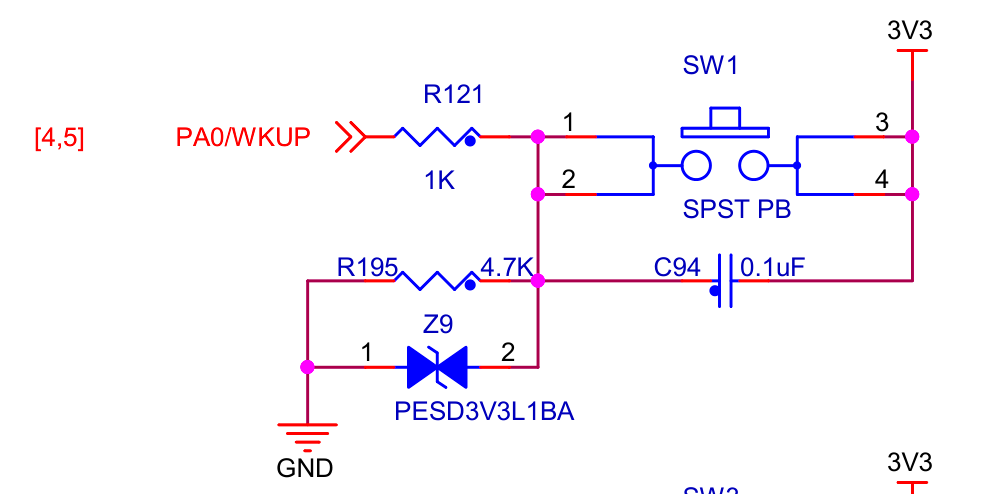
实现按下KEY1后蓝灯状态翻转
在bsp_led.h中宏定义电平翻转函数
#define LED_B_TOGGLE {LED_B_GPIO_PORT->ODR ^= LED_B_GPIO_PIN;}
/*----------------------------------------------------------------
^= 异或运算 (a ^ b) 则ab不同为1,相同则为0
ODR低16位和GPIO_Pin_1作异或并重新赋值给ODR可实现ODR的Bit0翻转
若Bit0=1则Bit0 = 1 ^ 1 = 0, 下一次运算时, Bit0=0则Bit0 = 0^1 = 1
实际上是ODR的Bit0在和1进行异或操作
----------------------------------------------------------------*/
在bsp_key.h中进行宏定义和函数声明
#ifndef __BSP_KEY_H
#define __BSP_KEY_H
#include "stm32f10x.h"
#define KEY_ON 1
#define KEY_OFF 0
// 宏定义
#define KEY1_GPIO_PIN GPIO_Pin_0 // stm32f10x_gpio.h中定义
#define KEY1_GPIO_PORT GPIOA // stm32f10x.h中定义
#define KEY1_GPIO_CLK RCC_APB2Periph_GPIOA
// 函数声明
void KEY_GPIO_Config(void);
uint8_t Key_Scan(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
#endif // !__BSP_KEY_H
在bsp_key.c中写初始化函数和端口扫描函数
#include "bsp_key.h"
void KEY_GPIO_Config(void)
{
RCC_APB2PeriphClockCmd(KEY1_GPIO_CLK, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = KEY1_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY1_GPIO_PORT, &GPIO_InitStruct);
}
// 端口扫面函数 检测按下返回1,否则返回0
uint8_t Key_Scan(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
if(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == KEY_ON)
{
while(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == KEY_ON)
{
;
}
return KEY_ON;
}
else
{
return KEY_OFF;
}
}
在main.c中进行调用
int main(void)
{
LED_GPIO_Config();
KEY_GPIO_Config();
while(1)
{
if(Key_Scan(KEY1_GPIO_PORT, KEY1_GPIO_PIN) == KEY_ON)
{
LED_B_TOGGLE;
}
}
}
补充: C语言中的异或操作
在C语言中,异或运算是一种基本的位运算,使用符号 ^ 表示。异或运算符对两个操作数的对应位进行比较,如果两个相应的位不同,则结果为1,如果相同,则结果为0换句话说,它在以下情况下返回1:
- 第一个操作数的位是0,第二个操作数的位是1。
- 第一个操作数的位是1,第二个操作数的位是0。
异或运算的特性
- 交换律:a ^ b 等于 b ^ a。
- 结合律:(a ^ b) ^ c 等于 a ^ (b ^ c)。
- 自反性:任何数与自身异或的结果都是0,即 a ^ a 等于 0。
- 与0的异或:任何数与0异或都等于它本身,即 a ^ 0 等于 a。
应用
异或运算在C语言编程中有多种应用:
值交换:不使用临时变量交换两个变量的值。
a = a ^ b;
b = a ^ b;
a = a ^ b;
这种方法虽然巧妙,但在实际编程中不常用,因为如果 a 和 b 指向同一内存位置,这会导致结果为0。
反转特定位:可以使用异或运算来反转数值中的特定位。
x = x ^ (1 << n); // 反转x的第n位
检查奇偶性:通过检查数的最低位是否为1,可以使用异或运算来快速检查一个数是奇数还是偶数。
加密和解密:由于异或运算的自反性,它可以用于简单的加密和解密操作。
示例
#include <stdio.h>
int main() {
unsigned int a = 5; // 二进制: 0101
unsigned int b = 3; // 二进制: 0011
// 执行异或运算
unsigned int result = a ^ b; // 结果是 6,二进制: 0110
printf("Result = %d\n", result);
return 0;
}
在这个例子中,5(二进制0101)和3(二进制0011)进行异或运算的结果是6(二进制0110),因为每一位都被相应地比较并计算出结果。
位带操作
位带简介
Cortex-M3微控制器,作为ARM的Cortex-M系列的一部分,提供了位带(Bit-banding)功能,这是一种允许对单个位进行原子读写操作的机制。这种功能在需要精确控制或原子性操作单个位的场合非常有用,例如在多任务环境中操作共享资源。
在 CM3 中,有两个区中实现了位带。其中一个是 SRAM 区的最低 1MB 范围,第二个则是片内外设区的最低 1MB 范围。这两个位带中的地址除了可以像普通的 RAM 一样使用外,它们还都有自己的“位带别名区”,位带别名区把每个比特膨胀成一个 32 位的字。
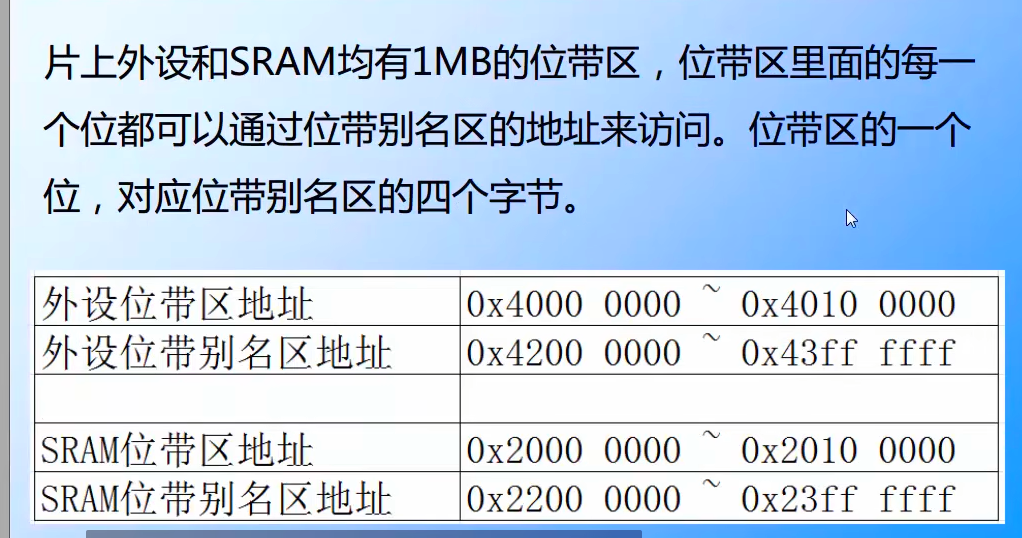
在CM3权威指南CnR2中支持位带操作的两个内存区的范围如下

位带操作的原理
位带操作在Cortex-M3中是通过将一个较大的地址空间(位带区域)映射到一个较小的地址空间(位带别名区域)来实现的。在Cortex-M3中,有两个主要的位带区域:
- SRAM位带区域:通常用于内存中的变量。
- 外设位带区域:用于外设寄存器。
每个位带区域的一个字(32位)对应主存储区的一个位。这意味着,通过写入位带区域的地址,你可以设置或清除主存储区相应位的值。
地址映射
位带操作的地址映射通常遵循以下规则:
位带别名地址 = 位带基地址 + (字节偏移量 x 32) + (位编号 x 4)
其中,字节偏移量是目标地址相对于位带区域基地址的偏移量,位编号是要操作的位。
示例
假设有一个外设寄存器的地址为 0x40000000,我们要设置这个寄存器的第2位。首先,我们需要计算这个位在位带别名区域中的地址。
假设外设位带区域的基地址是 0x42000000,那么:
- 字节偏移量 = 0x40000000 - 0x40000000 = 0x00000000
- 位编号 = 2
- 位带别名地址 = 0x42000000 + (0x00000000 x 32) + (2 x 4) = 0x42000008
然后,你可以直接写入这个位带别名地址来设置或清除该位:
#define BITBAND_PERIPH(address, bit) ((void*)(0x42000000 + ((address) - 0x40000000) * 32 + (bit) * 4))
unsigned int *alias_address = (unsigned int *)BITBAND_PERIPH(0x40000000, 2);
*alias_address = 1; // 设置第2位, 将第二位值设置为1
注意事项
- 硬件支持:确保你的Cortex-M3微控制器支持位带操作。
- 地址计算:正确的地址计算对于位带操作至关重要。
- 原子操作:位带操作是原子的,这意味着在多任务或中断驱动的环境中,它们是安全的。
使用位带操作实现GPIO的输出和输入
项目地址: 14-位带操作-GPIO的输出和输入
使用位带操作实现GPIO输出: LED_B的闪烁
在main.c中添加位带操作的宏定义
#define GPIOB_ODR_Addr (GPIOB_BASE+0x0C)
#define PBout(n) *(unsigned int*)((GPIOB_ODR_Addr&0xF0000000) + 0x02000000 + ((GPIOB_ODR_Addr&0x00FFFFFF)<<5)+(n<<2))
在main.c中使用位带操作
while(1)
{
PBout(1) = 1;
Delay(0xFFF); // 延时
PBout(1) = 0;
Delay(0xFFF); // 延时
}
使用位带操作实现GPIO输入: KEY1和KEY2控制LED_B状态翻转
在bsp_key.h中添加KEY2的宏定义
#define KEY2_GPIO_PIN GPIO_Pin_13 // stm32f10x_gpio.h中定义
#define KEY2_GPIO_PORT GPIOC // stm32f10x.h中定义
#define KEY2_GPIO_CLK RCC_APB2Periph_GPIOC
在bsp.c中增加KEY2的GPIO初始化
void KEY_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
// KEY1 初始化
RCC_APB2PeriphClockCmd(KEY1_GPIO_CLK, ENABLE);
GPIO_InitStruct.GPIO_Pin = KEY1_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY1_GPIO_PORT, &GPIO_InitStruct);
// KEY2 初始化
RCC_APB2PeriphClockCmd(KEY2_GPIO_CLK, ENABLE);
GPIO_InitStruct.GPIO_Pin = KEY2_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY2_GPIO_PORT, &GPIO_InitStruct);
}
在main.c中添加GPIO输入位带操作的宏定义
#define GPIOA_IDR_Addr (GPIOA_BASE+0x08)
#define GPIOC_IDR_Addr (GPIOC_BASE+0x08)
#define PAin(n) *(unsigned int*)((GPIOA_IDR_Addr&0xF0000000) + 0x02000000 + ((GPIOA_IDR_Addr&0x00FFFFFF)<<5)+(n<<2))
#define PCin(n) *(unsigned int*)((GPIOC_IDR_Addr&0xF0000000) + 0x02000000 + ((GPIOC_IDR_Addr&0x00FFFFFF)<<5)+(n<<2))
在main.c中使用位带操作
while(1)
{
if(PAin(0) == KEY_ON)
{
Delay(0xFFF); // 加入软件消抖后可正常运行
while(PAin(0) == KEY_ON) // 等待按键释放
{
;
}
LED_B_TOGGLE;
}
if(PCin(13) == KEY_ON)
{
Delay(0xFFF); // 加入软件消抖后可正常运行
while(PCin(13) == KEY_ON) // 等待按键释放
{
;
}
LED_B_TOGGLE;
}
}
启动文件详解
;******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
;* File Name : startup_stm32f10x_hd.s
;* Author : MCD Application Team
;* Version : V3.5.0
;* Date : 11-March-2011
;* Description : STM32F10x High Density Devices vector table for MDK-ARM
;* toolchain.
;* This module performs:
;* - Set the initial SP
; 初始化堆栈指针
;* - Set the initial PC == Reset_Handler
; 初始化PC指针 == Reset_Handler程序
;* - Set the vector table entries with the exceptions ISR address
; 初始化中断向量表
;* - Configure the clock system and also configure the external
;* SRAM mounted on STM3210E-EVAL board to be used as data
;* memory (optional, to be enabled by user)
; 配置系统时钟
;* - Branches to __main in the C library (which eventually
;* calls main()).
; 调用C库函数, 最终去到C的世界
;* After Reset the CortexM3 processor is in Thread mode,
;* priority is Privileged, and the Stack is set to Main.
;* <<< Use Configuration Wizard in Context Menu >>>
;*******************************************************************************
; THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
; WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
; AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
; INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
; CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
; INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
;*******************************************************************************
;****************************************************************************
;* 1- 栈的配置
;****************************************************************************
; Amount of memory (in bytes) allocated for Stack
; Tailor this value to your application needs
; <h> Stack Configuration
; <o> Stack Size (in Bytes) <0x0-0xFFFFFFFF:8>
; </h>
; 配置栈: 用于变量存储(局部/全局), 函数调用
Stack_Size EQU 0x00000400
; 宏定义的伪指令,相当于等于,类似与 C 中的 define。
; 将0x00000400命名为Stack_Size, 0x00000400表示1Kb大小
AREA STACK, NOINIT, READWRITE, ALIGN=3
; 告诉汇编器汇编一个新的代码段或者数据段。
; STACK 表示段名,这个可以任意命名
; NOINIT 表示不初始化
; READWRITE 表示可读可写
; ALIGN=3,表示按照 2^3 对齐,即 8 字节对齐
Stack_Mem SPACE Stack_Size
__initial_sp
; SPACE:用于分配一定大小的内存空间,单位为字节。这里指定大小等于 Stack_Size。
; 标号 __initial_sp 紧挨着 SPACE 语句放置,表示栈的结束地址,即栈顶地址,栈是由高向低生长
的。
;****************************************************************
;* 2-堆的配置
;****************************************************************
; <h> Heap Configuration
; <o> Heap Size (in Bytes) <0x0-0xFFFFFFFF:8>
; </h>
; 配置堆: 主要用于动态内存的分配, 如malloc()函数
Heap_Size EQU 0x00000200
; 将0x00000200命名为Heap_Size, 0x00000200为512Type
AREA HEAP, NOINIT, READWRITE, ALIGN=3
; 汇编数据段
; 名字叫HEAP
; 不初始化
; 可读可写
; 2^3即8字节对齐
__heap_base
Heap_Mem SPACE Heap_Size
__heap_limit
; __heap_base 表示对的起始地址
; SPACE 分配大小为Heap_Size即512字节的内存空间
; __heap_limit 表示堆的结束地址
; 堆是由低向高生长的,跟栈的生长方向相反。
PRESERVE8
; 指定当前文件的堆栈按照 8 字节对齐
THUMB
; 表示后面指令兼容 THUMB 指令
;****************************************************************
;* 3-初始化中断向量表
;****************************************************************
; Vector Table Mapped to Address 0 at Reset
AREA RESET, DATA, READONLY
; 区域名称为RESET
; 区域类型为DATA, 与CODE相对,后者用于包含可执行指令
; 区域属性为只读
EXPORT __Vectors
EXPORT __Vectors_End
EXPORT __Vectors_Size
; EXPORT声明标号__Vectors等具有全局属性, 可被外部的文件调用
__Vectors DCD __initial_sp ; Top of Stack ; 栈顶地址
DCD Reset_Handler ; Reset Handler ; 复位程序地址
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SVC_Handler ; SVCall Handler
DCD DebugMon_Handler ; Debug Monitor Handler
DCD 0 ; Reserved
DCD PendSV_Handler ; PendSV Handler
DCD SysTick_Handler ; SysTick Handler
; External Interrupts
DCD WWDG_IRQHandler ; Window Watchdog
DCD PVD_IRQHandler ; PVD through EXTI Line detect
DCD TAMPER_IRQHandler ; Tamper
DCD RTC_IRQHandler ; RTC
DCD FLASH_IRQHandler ; Flash
DCD RCC_IRQHandler ; RCC
DCD EXTI0_IRQHandler ; EXTI Line 0
DCD EXTI1_IRQHandler ; EXTI Line 1
DCD EXTI2_IRQHandler ; EXTI Line 2
DCD EXTI3_IRQHandler ; EXTI Line 3
DCD EXTI4_IRQHandler ; EXTI Line 4
DCD DMA1_Channel1_IRQHandler ; DMA1 Channel 1
DCD DMA1_Channel2_IRQHandler ; DMA1 Channel 2
DCD DMA1_Channel3_IRQHandler ; DMA1 Channel 3
DCD DMA1_Channel4_IRQHandler ; DMA1 Channel 4
DCD DMA1_Channel5_IRQHandler ; DMA1 Channel 5
DCD DMA1_Channel6_IRQHandler ; DMA1 Channel 6
DCD DMA1_Channel7_IRQHandler ; DMA1 Channel 7
DCD ADC1_2_IRQHandler ; ADC1 & ADC2
DCD USB_HP_CAN1_TX_IRQHandler ; USB High Priority or CAN1 TX
DCD USB_LP_CAN1_RX0_IRQHandler ; USB Low Priority or CAN1 RX0
DCD CAN1_RX1_IRQHandler ; CAN1 RX1
DCD CAN1_SCE_IRQHandler ; CAN1 SCE
DCD EXTI9_5_IRQHandler ; EXTI Line 9..5
DCD TIM1_BRK_IRQHandler ; TIM1 Break
DCD TIM1_UP_IRQHandler ; TIM1 Update
DCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and Commutation
DCD TIM1_CC_IRQHandler ; TIM1 Capture Compare
DCD TIM2_IRQHandler ; TIM2
DCD TIM3_IRQHandler ; TIM3
DCD TIM4_IRQHandler ; TIM4
DCD I2C1_EV_IRQHandler ; I2C1 Event
DCD I2C1_ER_IRQHandler ; I2C1 Error
DCD I2C2_EV_IRQHandler ; I2C2 Event
DCD I2C2_ER_IRQHandler ; I2C2 Error
DCD SPI1_IRQHandler ; SPI1
DCD SPI2_IRQHandler ; SPI2
DCD USART1_IRQHandler ; USART1
DCD USART2_IRQHandler ; USART2
DCD USART3_IRQHandler ; USART3
DCD EXTI15_10_IRQHandler ; EXTI Line 15..10
DCD RTCAlarm_IRQHandler ; RTC Alarm through EXTI Line
DCD USBWakeUp_IRQHandler ; USB Wakeup from suspend
DCD TIM8_BRK_IRQHandler ; TIM8 Break
DCD TIM8_UP_IRQHandler ; TIM8 Update
DCD TIM8_TRG_COM_IRQHandler ; TIM8 Trigger and Commutation
DCD TIM8_CC_IRQHandler ; TIM8 Capture Compare
DCD ADC3_IRQHandler ; ADC3
DCD FSMC_IRQHandler ; FSMC
DCD SDIO_IRQHandler ; SDIO
DCD TIM5_IRQHandler ; TIM5
DCD SPI3_IRQHandler ; SPI3
DCD UART4_IRQHandler ; UART4
DCD UART5_IRQHandler ; UART5
DCD TIM6_IRQHandler ; TIM6
DCD TIM7_IRQHandler ; TIM7
DCD DMA2_Channel1_IRQHandler ; DMA2 Channel1
DCD DMA2_Channel2_IRQHandler ; DMA2 Channel2
DCD DMA2_Channel3_IRQHandler ; DMA2 Channel3
DCD DMA2_Channel4_5_IRQHandler ; DMA2 Channel4 & Channel5
__Vectors_End
; _Vectors 为向量表起始地址,__Vectors_End 为向量表结束地址
; 向量表中,DCD 分配了一堆内存,并且以 ESR 的入口地址初始化它们
__Vectors_Size EQU __Vectors_End - __Vectors
; 向量表的大小为结束地址减去起始地址
AREA |.text|, CODE, READONLY
; 定义一个名称为.text 的代码段,只读
;****************************************************************
;* 4-复位程序
;****************************************************************
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
; WEAK 表示弱定义, 如果在其他地方定义了Reset_Handler就使用其他地方的定义
; 可以理解为C++中的"可以重载"
IMPORT __main
IMPORT SystemInit
;表示 SystemInit和 __main 这两个函数均来自外部的文件
LDR R0, =SystemInit
; 把SystemInit的地址加载到R0中
BLX R0
; 跳转到R0执行, 执行完毕后返回
LDR R0, =__main
; 把__main的地址加载到R0中
BX R0
; 跳转到R0执行, 执行完毕后不返回
ENDP
;****************************************************************
;* 5-中断服务函数
;****************************************************************
; Dummy Exception Handlers (infinite loops which can be modified)
; 中断服务函数均跳转到无限循环
; 目的是用户在未定义中断服务函数的情况下调用可进入无限循环状态中(兜底作用)
NMI_Handler PROC
EXPORT NMI_Handler [WEAK]
B .
; B 表示跳转指令
; . 表示无限循环
ENDP
HardFault_Handler\
PROC
EXPORT HardFault_Handler [WEAK]
B .
ENDP
MemManage_Handler\
PROC
EXPORT MemManage_Handler [WEAK]
B .
ENDP
BusFault_Handler\
PROC
EXPORT BusFault_Handler [WEAK]
B .
ENDP
UsageFault_Handler\
PROC
EXPORT UsageFault_Handler [WEAK]
B .
ENDP
SVC_Handler PROC
EXPORT SVC_Handler [WEAK]
B .
ENDP
DebugMon_Handler\
PROC
EXPORT DebugMon_Handler [WEAK]
B .
ENDP
PendSV_Handler PROC
EXPORT PendSV_Handler [WEAK]
B .
ENDP
SysTick_Handler PROC
EXPORT SysTick_Handler [WEAK]
B .
ENDP
Default_Handler PROC
EXPORT WWDG_IRQHandler [WEAK]
EXPORT PVD_IRQHandler [WEAK]
EXPORT TAMPER_IRQHandler [WEAK]
EXPORT RTC_IRQHandler [WEAK]
EXPORT FLASH_IRQHandler [WEAK]
EXPORT RCC_IRQHandler [WEAK]
EXPORT EXTI0_IRQHandler [WEAK]
EXPORT EXTI1_IRQHandler [WEAK]
EXPORT EXTI2_IRQHandler [WEAK]
EXPORT EXTI3_IRQHandler [WEAK]
EXPORT EXTI4_IRQHandler [WEAK]
EXPORT DMA1_Channel1_IRQHandler [WEAK]
EXPORT DMA1_Channel2_IRQHandler [WEAK]
EXPORT DMA1_Channel3_IRQHandler [WEAK]
EXPORT DMA1_Channel4_IRQHandler [WEAK]
EXPORT DMA1_Channel5_IRQHandler [WEAK]
EXPORT DMA1_Channel6_IRQHandler [WEAK]
EXPORT DMA1_Channel7_IRQHandler [WEAK]
EXPORT ADC1_2_IRQHandler [WEAK]
EXPORT USB_HP_CAN1_TX_IRQHandler [WEAK]
EXPORT USB_LP_CAN1_RX0_IRQHandler [WEAK]
EXPORT CAN1_RX1_IRQHandler [WEAK]
EXPORT CAN1_SCE_IRQHandler [WEAK]
EXPORT EXTI9_5_IRQHandler [WEAK]
EXPORT TIM1_BRK_IRQHandler [WEAK]
EXPORT TIM1_UP_IRQHandler [WEAK]
EXPORT TIM1_TRG_COM_IRQHandler [WEAK]
EXPORT TIM1_CC_IRQHandler [WEAK]
EXPORT TIM2_IRQHandler [WEAK]
EXPORT TIM3_IRQHandler [WEAK]
EXPORT TIM4_IRQHandler [WEAK]
EXPORT I2C1_EV_IRQHandler [WEAK]
EXPORT I2C1_ER_IRQHandler [WEAK]
EXPORT I2C2_EV_IRQHandler [WEAK]
EXPORT I2C2_ER_IRQHandler [WEAK]
EXPORT SPI1_IRQHandler [WEAK]
EXPORT SPI2_IRQHandler [WEAK]
EXPORT USART1_IRQHandler [WEAK]
EXPORT USART2_IRQHandler [WEAK]
EXPORT USART3_IRQHandler [WEAK]
EXPORT EXTI15_10_IRQHandler [WEAK]
EXPORT RTCAlarm_IRQHandler [WEAK]
EXPORT USBWakeUp_IRQHandler [WEAK]
EXPORT TIM8_BRK_IRQHandler [WEAK]
EXPORT TIM8_UP_IRQHandler [WEAK]
EXPORT TIM8_TRG_COM_IRQHandler [WEAK]
EXPORT TIM8_CC_IRQHandler [WEAK]
EXPORT ADC3_IRQHandler [WEAK]
EXPORT FSMC_IRQHandler [WEAK]
EXPORT SDIO_IRQHandler [WEAK]
EXPORT TIM5_IRQHandler [WEAK]
EXPORT SPI3_IRQHandler [WEAK]
EXPORT UART4_IRQHandler [WEAK]
EXPORT UART5_IRQHandler [WEAK]
EXPORT TIM6_IRQHandler [WEAK]
EXPORT TIM7_IRQHandler [WEAK]
EXPORT DMA2_Channel1_IRQHandler [WEAK]
EXPORT DMA2_Channel2_IRQHandler [WEAK]
EXPORT DMA2_Channel3_IRQHandler [WEAK]
EXPORT DMA2_Channel4_5_IRQHandler [WEAK]
WWDG_IRQHandler
PVD_IRQHandler
TAMPER_IRQHandler
RTC_IRQHandler
FLASH_IRQHandler
RCC_IRQHandler
EXTI0_IRQHandler
EXTI1_IRQHandler
EXTI2_IRQHandler
EXTI3_IRQHandler
EXTI4_IRQHandler
DMA1_Channel1_IRQHandler
DMA1_Channel2_IRQHandler
DMA1_Channel3_IRQHandler
DMA1_Channel4_IRQHandler
DMA1_Channel5_IRQHandler
DMA1_Channel6_IRQHandler
DMA1_Channel7_IRQHandler
ADC1_2_IRQHandler
USB_HP_CAN1_TX_IRQHandler
USB_LP_CAN1_RX0_IRQHandler
CAN1_RX1_IRQHandler
CAN1_SCE_IRQHandler
EXTI9_5_IRQHandler
TIM1_BRK_IRQHandler
TIM1_UP_IRQHandler
TIM1_TRG_COM_IRQHandler
TIM1_CC_IRQHandler
TIM2_IRQHandler
TIM3_IRQHandler
TIM4_IRQHandler
I2C1_EV_IRQHandler
I2C1_ER_IRQHandler
I2C2_EV_IRQHandler
I2C2_ER_IRQHandler
SPI1_IRQHandler
SPI2_IRQHandler
USART1_IRQHandler
USART2_IRQHandler
USART3_IRQHandler
EXTI15_10_IRQHandler
RTCAlarm_IRQHandler
USBWakeUp_IRQHandler
TIM8_BRK_IRQHandler
TIM8_UP_IRQHandler
TIM8_TRG_COM_IRQHandler
TIM8_CC_IRQHandler
ADC3_IRQHandler
FSMC_IRQHandler
SDIO_IRQHandler
TIM5_IRQHandler
SPI3_IRQHandler
UART4_IRQHandler
UART5_IRQHandler
TIM6_IRQHandler
TIM7_IRQHandler
DMA2_Channel1_IRQHandler
DMA2_Channel2_IRQHandler
DMA2_Channel3_IRQHandler
DMA2_Channel4_5_IRQHandler
B .
ENDP
ALIGN
; ALIGN 表示4字节对齐(参数缺省时)
;****************************************************************
;* 6-堆栈的初始化, 由C库函数__main实现
;****************************************************************
;*******************************************************************************
; User Stack and Heap initialization
;*******************************************************************************
IF :DEF:__MICROLIB ; __MICROLIB在ide里定义, 在Keil5 MDK中勾选Use MicroLIB选项
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory ; 如果__MICROLIB未定义, 则由用户自己实现
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem + Stack_Size)
LDR R2, = (Heap_Mem + Heap_Size)
LDR R3, = Stack_Mem
BX LR
ALIGN
ENDIF
END
;******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE*****
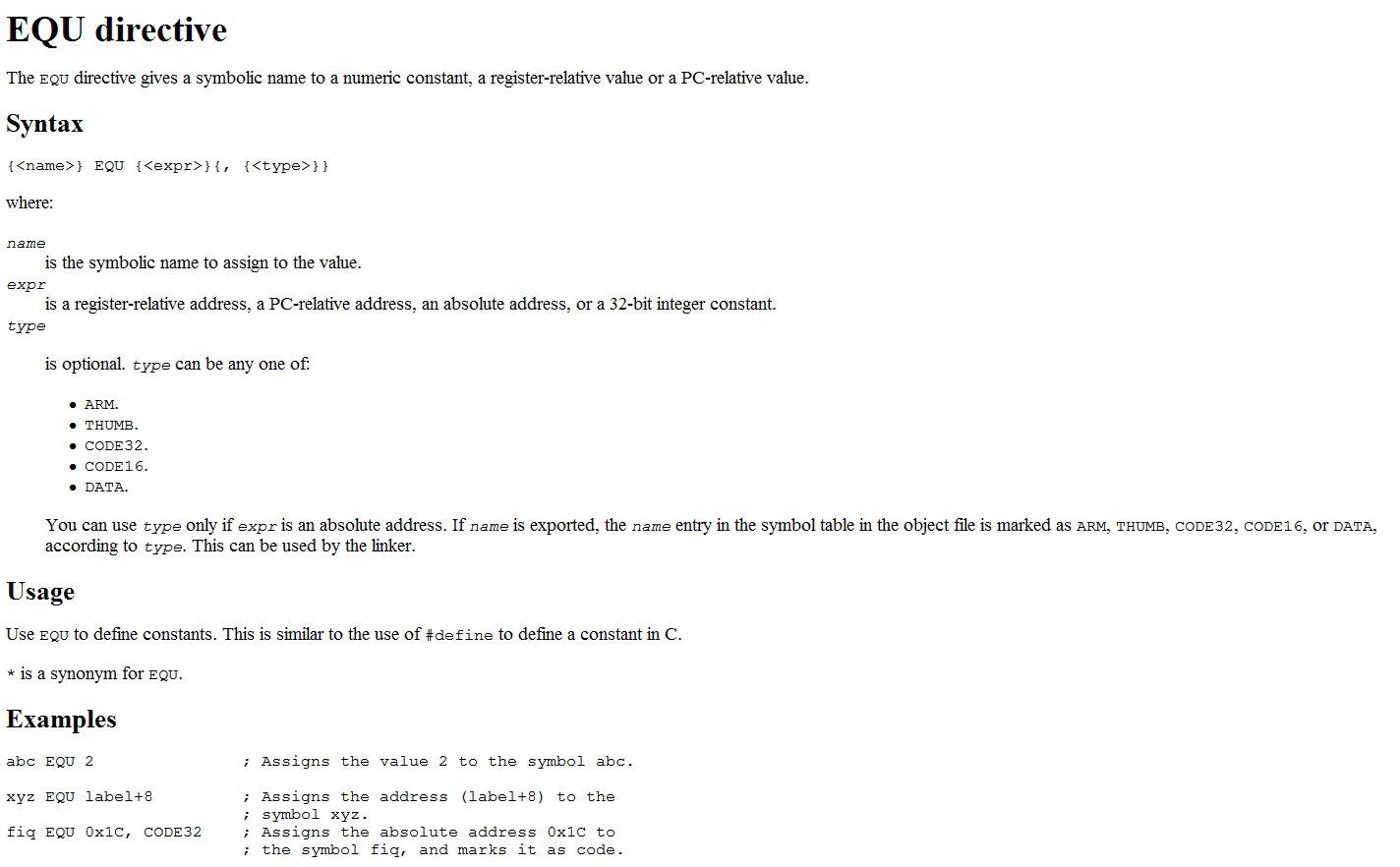
EQU指令
作用: The EQU directive is a register-relative address, a PC-relative address, an absolute address, or a 32-bit integer constant. // 为数值常量、寄存器相对值或 PC 相对值提供符号名称。(可以理解为重命名)
Stack_Size EQU 0x00000400
; 宏定义的伪指令,相当于等于,类似与 C 中的 define。
; 将0x00000400命名为Stack_Size, 0x00000400表示1Kb大小
EQU手册说明
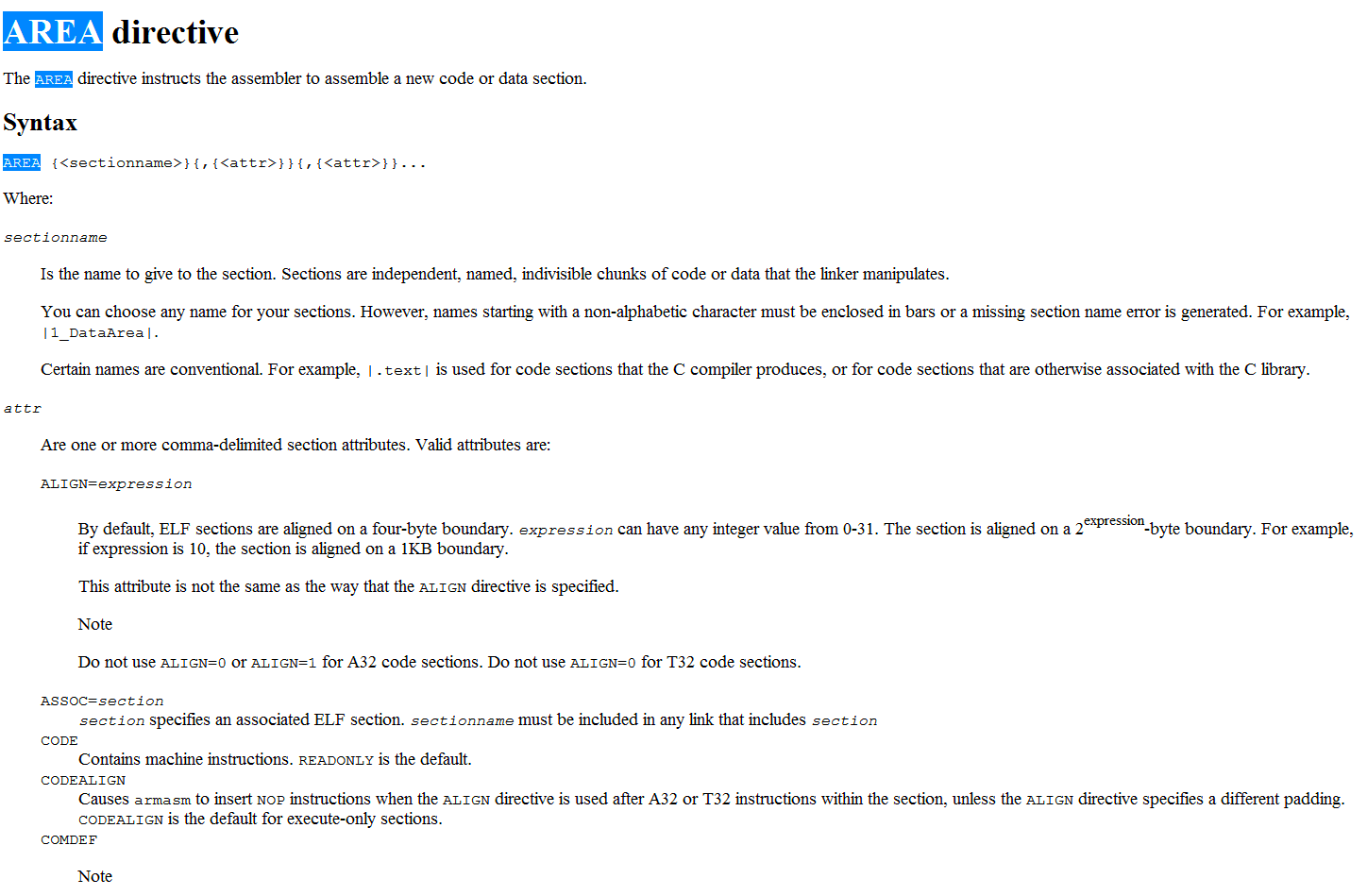
AREA指令
AREA: 汇编一个新的代码段或数据段
AREA STACK, NOINIT, READWRITE, ALIGN=3
; 告诉汇编器汇编一个新的代码段或者数据段。
; STACK 表示段名,这个可以任意命名
; NOINIT 表示不初始化
; READWRITE 表示可读可写
; ALIGN=3,表示按照 2^3 对齐,即 8 字节对齐
AREA手册说明
SPACE指令
SPACE:用于分配一定大小的内存空间,单位为字节。这里指定大小等于 Stack_Size, 标号 __initial_sp 紧挨着 SPACE 语句放置,表示栈的结束地址,即栈顶地址,栈是由高向低生长
Stack_Mem SPACE Stack_Size
; SPACE:用于分配一定大小的内存空间,单位为字节。这里指定大小等于 Stack_Size。
__initial_sp
; 标号 __initial_sp 紧挨着 SPACE 语句放置,表示栈的结束地址,即栈顶地址,栈是由高向低生长
SPACE手册说明
PRESERVE8指令
PRESERVE8:指定当前文件的堆栈按照 8 字节对齐
PRESERVE8手册说明

THUMB指令
野火的解释: THUMB:表示后面指令兼容 THUMB 指令。THUBM 是 ARM 以前的指令集,16bit,现在 Cortex-M系列的都使用 THUMB-2 指令集,THUMB-2 是 32 位的,兼容 16 位和 32 位的指令,是 THUMB的超集
THUMB手册说明
EXPORT指令
EXPORT:声明一个标号可被外部的文件使用,使标号具有全局属性。如果是 IAR 编译器,则使用的是 GLOBAL 这个指令
EXPORT __Vectors
EXPORT __Vectors_End
EXPORT __Vectors_Size
; EXPORT声明标号__Vectors等具有全局属性, 可被外部的文件调用
EXPORT手册说明
DCD指令
DCD:分配一个或者多个以字为单位的内存,以四字节对齐,并要求初始化这些内存
DCD手册说明
PROC指令
PROC: 定义子程序, 与ENDP成对使用, 表示子程序结束
PROC手册说明
IMPORT指令
IMPORT:表示该标号来自外部文件,跟 C 语言中的 EXTERN 关键字类似。
IMPORT __main
IMPORT SystemInit
;表示 SystemInit和 __main 这两个函数均来自外部的文件
IMPORT手册说明
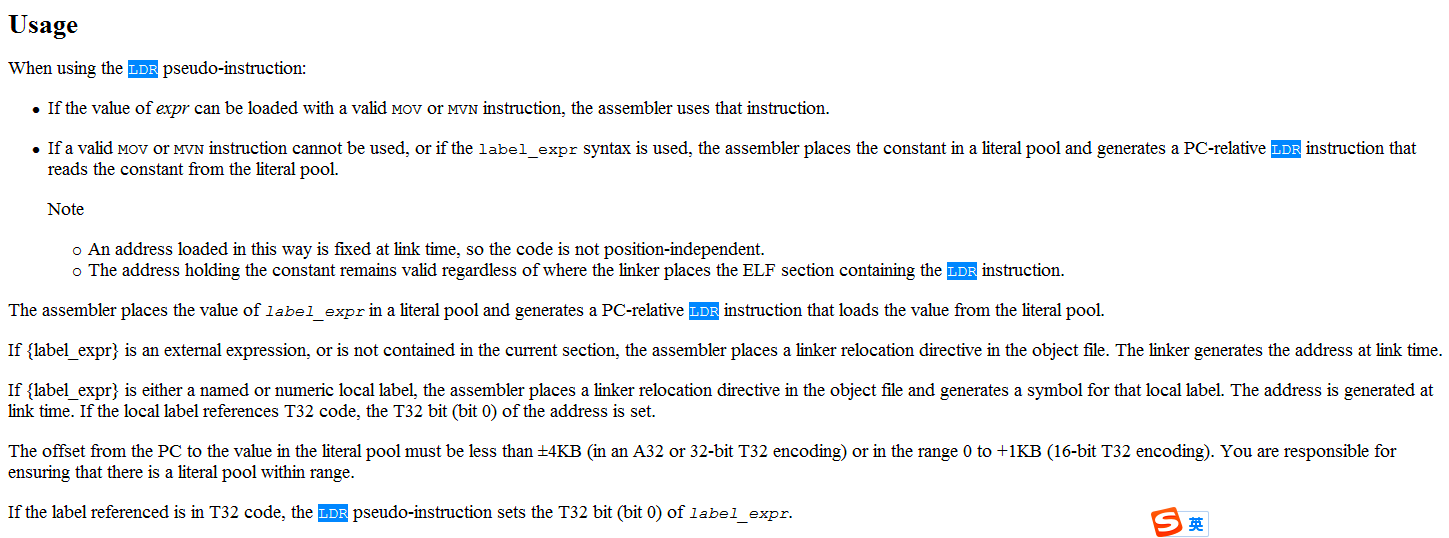
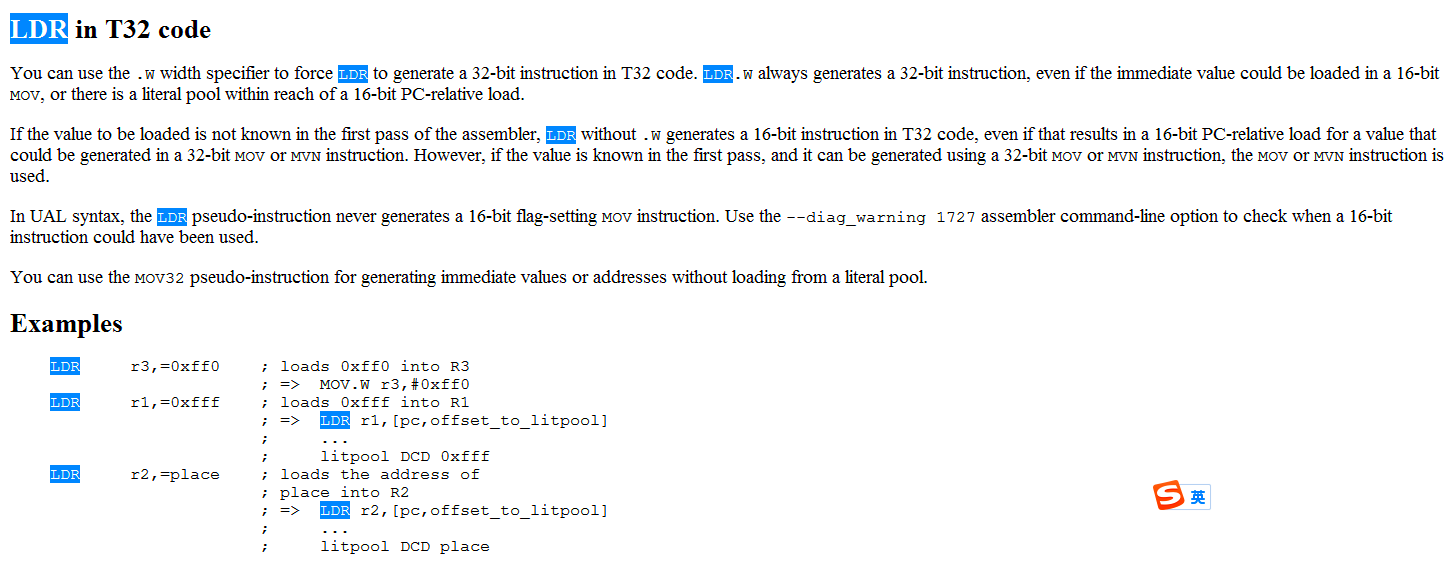
LDR指令
LDR: 从存储器中加载字到一个寄存器中
LDR R0, =SystemInit
; 把SystemInit的地址加载到R0中
BLX R0
; 跳转到R0执行, 执行完毕后返回
LDR R0, =__main
; 把__main的地址加载到R0中
BX R0
; 跳转到R0执行, 执行完毕后不返回
LDR手册说明
BLX指令
BLX: 跳转到由寄存器给出的地址, 并根据寄存器的LSE确定处理器的状态, 还要把跳转前的下条指令地址保存到LR
BLX R0
; 跳转到R0执行, 执行完毕后返回
BX指令
BX: 跳转到由寄存器/标号给出的地址, 不用返回
BX R0
; 跳转到R0执行, 执行完毕后不返回
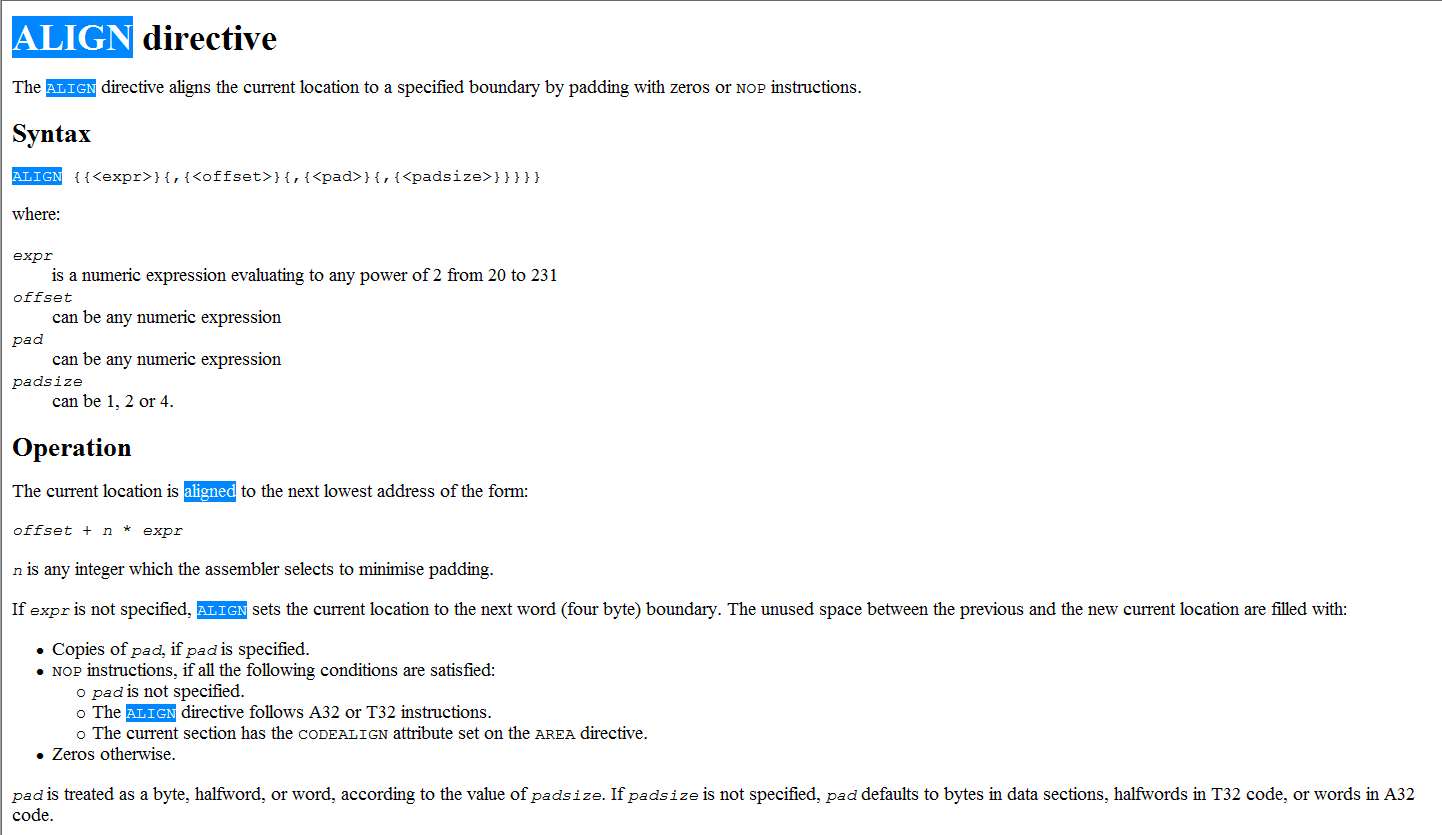
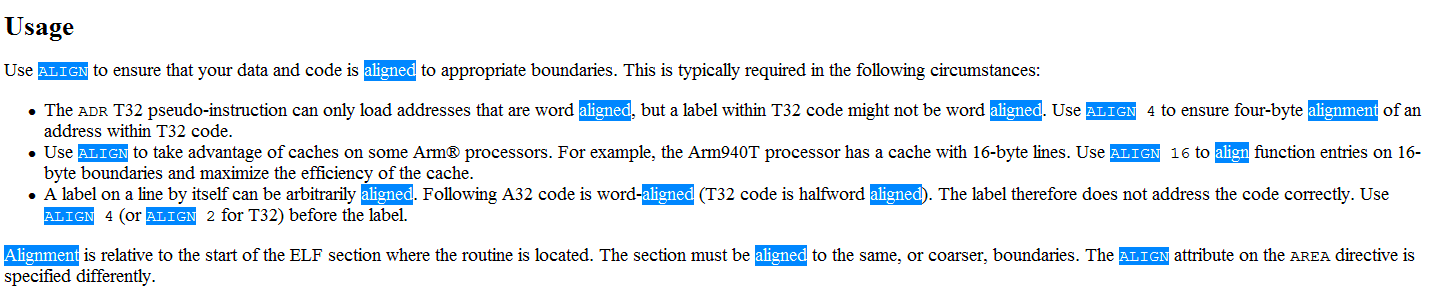
ALIGN指令
ALIGN:对指令或者数据存放的地址进行对齐,后面会跟一个立即数。缺省表示 4 字节对齐
ALIGN手册说明
时钟
时钟系统框图
时钟源选择
- HSI_RC: 高速内部时钟, RC 震荡产生(频率约为 8MHz)
- HSE: 高速外部时钟,通过外接晶振产生(频率范围: 4-16MHz)
- PLL: 锁相环,倍频到72MHz
SYSCLK 系统时钟的选择
- HSI_RC 约 8MHz
- PLLCLK 倍频至72MHz
- HSE_Osc直接使用
PLL锁相环的选择
- HSI_RC 两分频后
- HSE_Osc or HSE_Osc二分频后
CSS: 时钟监视系统, 监视 HSE_Osc 是否正常工作,若 外部时钟源异常则将 SYSCLK 切换为 HSI_RC

时钟源选择
- LSE_Osc: 低速外部时钟源, 频率为36.768KHz
- LSI_RC: 低速内部时钟源, 频率约为40KHz, 由 RC 震荡产生
RTC_CLK(RTC 时钟)的选择
- HSE_Osc 128 分频后
- LSE_Osc
- LSI_RC
IWDGCLK独立看门狗时钟由LSI_RC 提供
MCO是一个引脚来输出内部时钟
MCO 的选择
- SYSCLK
- HSI
- HSE
- PLLCLK 二分频

- USBCLK_48MHz (USB 时钟): 由 PLLCLK经USB_Prescaler预分频至 48MHz
- HCLK: SYSCLK->AHB_Prescaler 最高 72MHz
- PCLK1: SYSCLK->AHB_Prescaler->APB1_Prescaler 最高36MHz
- TIMxCLK(通用定时器时钟): SYSCLK->AHB_Prescaler->APB1_Prescaler->TIM2,3,4_Multiplier
- PCKL2: SYSCLK->AHB_Prescaler->APB2_Prescaler 最高72MHz
- TIM1CLK(TIM1 时钟): SYSCLK->AHB_Prescal->APB2_Prescaler->TIM1_Multiplier
- ADCCLK(ADC 时钟): SYSCLK->AHB_Prescaler->APB2_Prescaler->ADC_Prescaler

系统时钟配置函数 SetSysClockTo72()
在启动文件startup_stm32f10x_hd.s中执行SystemInit函数, 如下
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
IMPORT SystemInit
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
在system_stm32f10x.c文件中调用SystemInit函数, SystemInit函数在末尾调用SetSysClock()函数
void SystemInit (void)
{
/* Reset the RCC clock configuration to the default reset state(for debug purpose) */
/* Set HSION bit */
RCC->CR |= (uint32_t)0x00000001;
/* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */
#ifndef STM32F10X_CL
RCC->CFGR &= (uint32_t)0xF8FF0000;
#else
RCC->CFGR &= (uint32_t)0xF0FF0000;
#endif /* STM32F10X_CL */
/* Reset HSEON, CSSON and PLLON bits */
RCC->CR &= (uint32_t)0xFEF6FFFF;
/* Reset HSEBYP bit */
RCC->CR &= (uint32_t)0xFFFBFFFF;
/* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */
RCC->CFGR &= (uint32_t)0xFF80FFFF;
#ifdef STM32F10X_CL
/* Reset PLL2ON and PLL3ON bits */
RCC->CR &= (uint32_t)0xEBFFFFFF;
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x00FF0000;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000;
#elif defined (STM32F10X_LD_VL) || defined (STM32F10X_MD_VL) || (defined STM32F10X_HD_VL)
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000;
#else
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000;
#endif /* STM32F10X_CL */
#if defined (STM32F10X_HD) || (defined STM32F10X_XL) || (defined STM32F10X_HD_VL)
#ifdef DATA_IN_ExtSRAM
SystemInit_ExtMemCtl();
#endif /* DATA_IN_ExtSRAM */
#endif
/* Configure the System clock frequency, HCLK, PCLK2 and PCLK1 prescalers */
/* Configure the Flash Latency cycles and enable prefetch buffer */
SetSysClock(); // 末尾调用SetSysClock()函数
调用system_stm32f10x.c中SetSysClock()
默认情况下定义SYSCLK_FREQ_72MHz宏, 调用SetSysClockTo72()函数
/**
* @brief Configures the System clock frequency, HCLK, PCLK2 and PCLK1 prescalers.
* @param None
* @retval None
*/
static void SetSysClock(void)
{
#ifdef SYSCLK_FREQ_HSE
SetSysClockToHSE();
#elif defined SYSCLK_FREQ_24MHz
SetSysClockTo24();
#elif defined SYSCLK_FREQ_36MHz
SetSysClockTo36();
#elif defined SYSCLK_FREQ_48MHz
SetSysClockTo48();
#elif defined SYSCLK_FREQ_56MHz
SetSysClockTo56();
#elif defined SYSCLK_FREQ_72MHz
SetSysClockTo72();
#endif
/* If none of the define above is enabled, the HSI is used as System clock
source (default after reset) */
}
在system_stm32f10x.c中宏定义, 默认宏定义SYSTEMCLK_FREQ_72MHz
#if defined (STM32F10X_LD_VL) || (defined STM32F10X_MD_VL) || (defined STM32F10X_HD_VL)
/* #define SYSCLK_FREQ_HSE HSE_VALUE */
#define SYSCLK_FREQ_24MHz 24000000
#else
/* #define SYSCLK_FREQ_HSE HSE_VALUE */
/* #define SYSCLK_FREQ_24MHz 24000000 */
/* #define SYSCLK_FREQ_36MHz 36000000 */
/* #define SYSCLK_FREQ_48MHz 48000000 */
/* #define SYSCLK_FREQ_56MHz 56000000 */
#define SYSCLK_FREQ_72MHz 72000000
#endif
在system_stem32f10x.c中定义SetSysClockTo72()函数
#elif defined SYSCLK_FREQ_72MHz
/**
* @brief Sets System clock frequency to 72MHz and configure HCLK, PCLK2
* and PCLK1 prescalers.
* @note This function should be used only after reset.
* @param None
* @retval None
*/
static void SetSysClockTo72(void)
{
__IO uint32_t StartUpCounter = 0, HSEStatus = 0;
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration ---------------------------*/
/* Enable HSE */
// 使能HSE
RCC->CR |= ((uint32_t)RCC_CR_HSEON);
/* Wait till HSE is ready and if Time out is reached exit */
// 等待 HSE 就绪并作超时处理
do
{
HSEStatus = RCC->CR & RCC_CR_HSERDY;
StartUpCounter++;
} while((HSEStatus == 0) && (StartUpCounter != HSE_STARTUP_TIMEOUT));
if ((RCC->CR & RCC_CR_HSERDY) != RESET)
{
HSEStatus = (uint32_t)0x01;
}
else
{
HSEStatus = (uint32_t)0x00;
}
// 如果 HSE启动成功, 程序则继续往下执行
if (HSEStatus == (uint32_t)0x01)
{
/* Enable Prefetch Buffer */
// 启用 Flsh 预取缓冲区
FLASH->ACR |= FLASH_ACR_PRFTBE;
/* Flash 2 wait state */
// flash 时延两个等待状态
FLASH->ACR &= (uint32_t)((uint32_t)~FLASH_ACR_LATENCY);
FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_2;
/* HCLK = SYSCLK */
// 72MHz
RCC->CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1;
/* PCLK2 = HCLK */
// 72MHz
RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE2_DIV1;
/* PCLK1 = HCLK */
// 36MHz
RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE1_DIV2;
/*----------------------------------------------------------------
* 互联型芯片 F105, F107 以下代码不进行分析
*---------------------------------------------------------------*/
/**********************************************************************/
#ifdef STM32F10X_CL
/* Configure PLLs ------------------------------------------------------*/
/* PLL2 configuration: PLL2CLK = (HSE / 5) * 8 = 40 MHz */
/* PREDIV1 configuration: PREDIV1CLK = PLL2 / 5 = 8 MHz */
RCC->CFGR2 &= (uint32_t)~(RCC_CFGR2_PREDIV2 | RCC_CFGR2_PLL2MUL |
RCC_CFGR2_PREDIV1 | RCC_CFGR2_PREDIV1SRC);
RCC->CFGR2 |= (uint32_t)(RCC_CFGR2_PREDIV2_DIV5 | RCC_CFGR2_PLL2MUL8 |
RCC_CFGR2_PREDIV1SRC_PLL2 | RCC_CFGR2_PREDIV1_DIV5);
/* Enable PLL2 */
RCC->CR |= RCC_CR_PLL2ON;
/* Wait till PLL2 is ready */
while((RCC->CR & RCC_CR_PLL2RDY) == 0)
{
}
/* PLL configuration: PLLCLK = PREDIV1 * 9 = 72 MHz */
// 锁相环配置
RCC->CFGR &= (uint32_t)~(RCC_CFGR_PLLXTPRE | RCC_CFGR_PLLSRC | RCC_CFGR_PLLMULL);
RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLXTPRE_PREDIV1 | RCC_CFGR_PLLSRC_PREDIV1 |
RCC_CFGR_PLLMULL9);
#else
/* Enable PLL */
// 使能 PLL
RCC->CR |= RCC_CR_PLLON;
/* Wait till PLL is ready */
// 等待 PLL 稳定
while((RCC->CR & RCC_CR_PLLRDY) == 0)
{
}
/* Select PLL as system clock source */
// 选择 PLLCLK 作为系统时钟
RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW));
RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL;
/* Wait till PLL is used as system clock source */
// 等待 PLLCLK 切换为系统时钟
while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x08)
{
}
}
else
{ /* If HSE fails to start-up, the application will have wrong clock
configuration. User can add here some code to deal with this error */
// 如果 HSE 启动失败,用户可以在这里添加处理错误的代码
}
}
#endif
HSE配置系统时钟
项目地址: 16-使用HSE配置系统时钟并使用MCO输出监控系统时钟
在bsp_rccclkconfig.c中写入HSE的配置函数, 参数为倍频因子
/**
* @brief 设置系统时钟为外部高速晶振(HSE)时钟,并配置PLL倍频系数。
*
* @param RCC_PLLMul_x PLL倍频系数,范围为2-16。
* @note 该函数会将RCC模块复位,并使能HSE。如果HSE启动成功,则设置FLASH预取指令使能、FLASH等待周期、AHB总线时钟、APB1总线时钟、APB2总线时钟、PLL倍频系数,并等待PLL稳定后将系统时钟设置为PLL时钟。
* 如果HSE启动失败,则用户可以在函数中添加处理错误的代码。
*/
void HSE_SetSysClk(uint32_t RCC_PLLMul_x)
{
RCC_DeInit(); // RCC复位
ErrorStatus HSEStatus;
RCC_HSEConfig(RCC_HSE_ON); // 使能HSE
HSEStatus = RCC_WaitForHSEStartUp(); // 获取HSE启动状态
if(HSEStatus == SUCCESS)
{
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); // 使能预取指
FLASH_SetLatency(FLASH_ACR_LATENCY_2); // 设置等待
RCC_HCLKConfig(RCC_SYSCLK_Div1); //HCLK = SYSCLK = 72MHz
RCC_PCLK1Config(RCC_SYSCLK_Div2); //PCLK1 = HCLK / 2 = 36MHz
RCC_PCLK2Config(RCC_SYSCLK_Div1); //PCLK2 = HCLK / 1 = 72MHz
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_x); // RCC_RLLMul_x 用来超频 频率:(8*x)MHz
RCC_PLLCmd(ENABLE); // 使能PLL
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
// 等待PLL稳定
;
}
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); // 设置系统时钟为PLL时钟
while(RCC_GetSYSCLKSource() != 0x08)
{
// 等待设置系统时钟
;
}
}
else
{
// 如果HSE启动失败, 用户在此添加处理错误代码
}
}
在bsp_rccclkconfig.c中编写MCO的GPIO初始化函数
/**
* @brief Configures the GPIO for MCO (Microcontroller Clock Output).
*
* This function initializes the GPIO pin for MCO and configures it as an alternate function push-pull output.
* The GPIO pin used for MCO is GPIOA Pin 8.
*
* @param None
* @return None
*/
void MCO_GPIO_Config()
{
// MCO的GPIO初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
在bsp_rccclkconfig.h中添加函数声明
#ifndef __BSP_RCCCLKCONFIG_H
#define __BSP_RCCCLKCONFIG_H
#include "stm32f10x.h"
void HSE_SetSysClk(uint32_t RCC_PLLMul_x);
void MCO_GPIO_Config();
#endif // !__BSP_RCCCLKCONFIG_H
在main.c中调用HSE配置系统时钟函数和MCO的GPIO初始化函数
#include "stm32f10x.h"
#include "bsp_led.h"
#include "bsp_rccclkconfig.h"
// 延时函数Delay()
void Delay(uint32_t count)
{
uint32_t i = 0;
for(; count != 0; count--)
{
for(i = 0; i < 0x2AFF; i++)
{
;
}
}
}
int main(void)
{
HSE_SetSysClk(RCC_PLLMul_9); // 72MHz
// HSE_SetSysClk(RCC_PLLMul_16); // 128MHz
MCO_GPIO_Config();
RCC_MCOConfig(RCC_MCO_SYSCLK); // 配置MCO选择系统时钟
LED_GPIO_Config();
while(1)
{
LED_B(OFF);
Delay(50); // 延时
LED_B(ON);
Delay(50); // 延时
}
}
使用HSI配置系统时钟并用MCO监控系统时钟
项目地址: 16-使用HSI配置系统时钟并用MCO监控系统时钟
在bsp_rccclkconfig.c中编写HSI配置系统时钟函数
/**
* @brief 设置系统时钟为HSI,并配置PLL倍频系数
*
* @param RCC_PLLMul_x PLL倍频系数,范围为2-16
*
* @note 该函数将系统时钟设置为HSI,并根据传入的PLL倍频系数配置PLL,以实现超频功能。
* 如果HSI启动失败,用户可以在函数的else分支中添加处理错误的代码。
*/
void HSI_SetSysClk(uint32_t RCC_PLLMul_x)
{
// Function implementation
__IO uint32_t HSIStatus = 0; // 参考固件库源码
RCC_DeInit(); // RCC复位
RCC_HSICmd(ENABLE); // 使能HSI
HSIStatus = RCC->CR & RCC_CR_HSIRDY; // 获取HSI启动状态, 参考固件库源码
if(HSIStatus == RCC_CR_HSIRDY)
{
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); // 使能预取指
FLASH_SetLatency(FLASH_ACR_LATENCY_2); // 设置等待
RCC_HCLKConfig(RCC_SYSCLK_Div1); //HCLK = SYSCLK = 72MHz
RCC_PCLK1Config(RCC_SYSCLK_Div2); //PCLK1 = HCLK / 2 = 36MHz
RCC_PCLK2Config(RCC_SYSCLK_Div1); //PCLK2 = HCLK / 1 = 72MHz
RCC_PLLConfig(RCC_PLLSource_HSI_Div2, RCC_PLLMul_x); // RCC_RLLMul_x 用来超频 频率:(8*x)MHz
RCC_PLLCmd(ENABLE); // 使能PLL
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
// 等待PLL稳定
;
}
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); // 设置系统时钟为PLL时钟
while(RCC_GetSYSCLKSource() != 0x08)
{
// 等待设置系统时钟
;
}
}
else
{
// 如果HSI启动失败, 用户在此添加处理错误代码
}
}
在bsp_rccclkconfig.h中加入函数声明
void HSI_SetSysClk(uint32_t RCC_PLLMul_x);
在main.c中调用HSI配置系统时钟函数
HSI_SetSysClk(RCC_PLLMul_12); // 4*12=48MHz
MCO_GPIO_Config();
RCC_MCOConfig(RCC_MCO_SYSCLK); // 配置MCO选择系统时钟
LED_GPIO_Config();
中断
STM32中断应用概览
中断类型
- 系统异常: 体现在内核水平
- 外部中断: 体现在外设水平
NVIC
NVIC负责管理中断
在core_cm3.h中的定义
/** @addtogroup CMSIS_CM3_NVIC CMSIS CM3 NVIC
memory mapped structure for Nested Vectored Interrupt Controller (NVIC)
@{
*/
typedef struct
{
// 中断使能寄存器
__IO uint32_t ISER[8]; /*!< Offset: 0x000 Interrupt Set Enable Register */
uint32_t RESERVED0[24];
// 中断清除寄存器
__IO uint32_t ICER[8]; /*!< Offset: 0x080 Interrupt Clear Enable Register */
uint32_t RSERVED1[24];
// 中断使能悬起寄存器
__IO uint32_t ISPR[8]; /*!< Offset: 0x100 Interrupt Set Pending Register */
uint32_t RESERVED2[24];
// 中断清除悬起寄存器
__IO uint32_t ICPR[8]; /*!< Offset: 0x180 Interrupt Clear Pending Register */
uint32_t RESERVED3[24];
// 中断有效位寄存器
__IO uint32_t IABR[8]; /*!< Offset: 0x200 Interrupt Active bit Register */
uint32_t RESERVED4[56];
// 中断优先级寄存器
__IO uint8_t IP[240]; /*!< Offset: 0x300 Interrupt Priority Register (8Bit wide) */
uint32_t RESERVED5[644];
// 软件触发中断寄存器
__O uint32_t STIR; /*!< Offset: 0xE00 Software Trigger Interrupt Register */
} NVIC_Type;
/*@}*/ /* end of group CMSIS_CM3_NVIC */
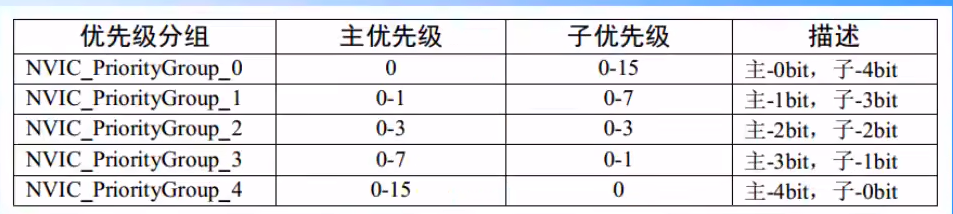
NVIC的优先级分组
通过SCB->AIRCR寄存器的PRIGROUP部分(即bit[10:8])进行分组
中断编程的顺序
- 使能中断请求(使能外设中断, 使能 NVIC 中断)
- 配置中断优先级分组(NVIC_PriorityGroupConfig)
- 配置 NVIC 寄存器, 初始化NVIC_InitTypeDef
- 编写中断服务函数
EXTI
EXTI 输入线
通过寄存器 AFIO_EXTICR1, 2, 3, 4配置
EXTI 框图讲解
外部中断流程
- 通过 EXTI_RTSR 和 EXTI_FTSR 来配置上升沿/下降沿触发, 触发后边沿检测电路为 1
- 通过 EXTI_SWIER 来配置软件中断, 配置后为 1
- 经过逻辑与门后, 进入请求挂起寄存器
- 通过 EXTI_PR 配置挂起
- 通过 EXTI_IMR 配置中断屏蔽
- 请求挂起寄存器的逻辑值与中断屏蔽寄存器的逻辑值做逻辑与至 NVIC 中断控制器
外部事件流程
- 通过 EXTI_RTSR 和 EXTI_FTSR 来配置上升沿/下降沿触发, 触发后边沿检测电路为 1
- 通过 EXTI_SWIER 来配置软件中断, 配置后为 1
- 经过逻辑与门后, 向下跟事件屏蔽寄存器相与
- 通过 EXTI_EMR 配置事件屏蔽
- 若为 1 产生脉冲
EXTI 结构体
EXTI_InitTypeDef
- EXTI_Line : 用于产生中断/事件线
- EXTI_Mode : EXTI 模式(中断/事件)
- EXTI_Trigger : 触发(上/下/上下)
- EXTI_LineCmd : 使能或者失能(IMR/EMR)
EXTI 的结构体定义
/**
* @brief EXTI Init Structure definition
*/
typedef struct
{
uint32_t EXTI_Line; /*!< Specifies the EXTI lines to be enabled or disabled.
This parameter can be any combination of @ref EXTI_Lines */
EXTIMode_TypeDef EXTI_Mode; /*!< Specifies the mode for the EXTI lines.
This parameter can be a value of @ref EXTIMode_TypeDef */
EXTITrigger_TypeDef EXTI_Trigger; /*!< Specifies the trigger signal active edge for the EXTI lines.
This parameter can be a value of @ref EXTIMode_TypeDef */
FunctionalState EXTI_LineCmd; /*!< Specifies the new state of the selected EXTI lines.
This parameter can be set either to ENABLE or DISABLE */
}EXTI_InitTypeDef;
/**
* @}
*/
EXTI_Line 的定义
/** @defgroup EXTI_Lines
* @{
*/
#define EXTI_Line0 ((uint32_t)0x00001) /*!< External interrupt line 0 */
#define EXTI_Line1 ((uint32_t)0x00002) /*!< External interrupt line 1 */
#define EXTI_Line2 ((uint32_t)0x00004) /*!< External interrupt line 2 */
#define EXTI_Line3 ((uint32_t)0x00008) /*!< External interrupt line 3 */
#define EXTI_Line4 ((uint32_t)0x00010) /*!< External interrupt line 4 */
#define EXTI_Line5 ((uint32_t)0x00020) /*!< External interrupt line 5 */
#define EXTI_Line6 ((uint32_t)0x00040) /*!< External interrupt line 6 */
#define EXTI_Line7 ((uint32_t)0x00080) /*!< External interrupt line 7 */
#define EXTI_Line8 ((uint32_t)0x00100) /*!< External interrupt line 8 */
#define EXTI_Line9 ((uint32_t)0x00200) /*!< External interrupt line 9 */
#define EXTI_Line10 ((uint32_t)0x00400) /*!< External interrupt line 10 */
#define EXTI_Line11 ((uint32_t)0x00800) /*!< External interrupt line 11 */
#define EXTI_Line12 ((uint32_t)0x01000) /*!< External interrupt line 12 */
#define EXTI_Line13 ((uint32_t)0x02000) /*!< External interrupt line 13 */
#define EXTI_Line14 ((uint32_t)0x04000) /*!< External interrupt line 14 */
#define EXTI_Line15 ((uint32_t)0x08000) /*!< External interrupt line 15 */
#define EXTI_Line16 ((uint32_t)0x10000) /*!< External interrupt line 16 Connected to the PVD Output */
#define EXTI_Line17 ((uint32_t)0x20000) /*!< External interrupt line 17 Connected to the RTC Alarm event */
#define EXTI_Line18 ((uint32_t)0x40000) /*!< External interrupt line 18 Connected to the USB Device/USB OTG FS
Wakeup from suspend event */
#define EXTI_Line19 ((uint32_t)0x80000) /*!< External interrupt line 19 Connected to the Ethernet Wakeup event */
EXTI_Mode 的定义
/**
* @brief EXTI mode enumeration
*/
typedef enum
{
EXTI_Mode_Interrupt = 0x00,
EXTI_Mode_Event = 0x04
}EXTIMode_TypeDef;
#define IS_EXTI_MODE(MODE) (((MODE) == EXTI_Mode_Interrupt) || ((MODE) == EXTI_Mode_Event))
EXTI_Trigger 的定义
/**
* @brief EXTI Trigger enumeration
*/
typedef enum
{
EXTI_Trigger_Rising = 0x08,
EXTI_Trigger_Falling = 0x0C,
EXTI_Trigger_Rising_Falling = 0x10
}EXTITrigger_TypeDef;
#define IS_EXTI_TRIGGER(TRIGGER) (((TRIGGER) == EXTI_Trigger_Rising) || \
((TRIGGER) == EXTI_Trigger_Falling) || \
((TRIGGER) == EXTI_Trigger_Rising_Falling))
GPIO 作为 EXTI 输入线的配置
在 stm32f10x_gpio.c 中, 使用 GPIO_EXTILineConfig 函数进行配置
/**
* @brief Selects the GPIO pin used as EXTI Line.
* @param GPIO_PortSource: selects the GPIO port to be used as source for EXTI lines.
* This parameter can be GPIO_PortSourceGPIOx where x can be (A..G).
* @param GPIO_PinSource: specifies the EXTI line to be configured.
* This parameter can be GPIO_PinSourcex where x can be (0..15).
* @retval None
*/
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource)
{
uint32_t tmp = 0x00;
/* Check the parameters */
assert_param(IS_GPIO_EXTI_PORT_SOURCE(GPIO_PortSource));
assert_param(IS_GPIO_PIN_SOURCE(GPIO_PinSource));
tmp = ((uint32_t)0x0F) << (0x04 * (GPIO_PinSource & (uint8_t)0x03));
AFIO->EXTICR[GPIO_PinSource >> 0x02] &= ~tmp;
AFIO->EXTICR[GPIO_PinSource >> 0x02] |= (((uint32_t)GPIO_PortSource) << (0x04 * (GPIO_PinSource & (uint8_t)0x03)));
}
EXTI中断实验
项目地址: 18-EXTI
项目需求:
- PA0 连接到 EXTI 用于产生中断, PA0 的电平变化通过按键来控制
- 产生一次中断, LED 反转一次
初始化要连接到EXTI的GPIO, 在bsp_exti.c中
// 初始化 Key1(PA0)
RCC_APB2PeriphClockCmd(KEY1_INT_GPIO_CLK, ENABLE);
GPIO_InitStruct.GPIO_Pin = KEY1_INT_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(KEY1_INT_GPIO_PORT, &GPIO_InitStruct);
初始化EXTI用于产生中断/事件, 在bsp_exti.c中
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); // 选择输入线
EXTI_InitStruct.EXTI_Line = EXTI_Line0; // 选择EXTI线路
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 选择中断模式
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling; // 选择触发模式
EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 使能EXTI线路
EXTI_Init(&EXTI_InitStruct);
初始化NVIC, 用于处理中断, 在bsp_exti.c中
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); // 配置中断优先级分组
NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn; // 选择中断源
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; // 抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; // 子优先级
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; // 使能中断
NVIC_Init(&NVIC_InitStruct);
编写中断服务函数, 在stm32f10x_it.c中
/**
* @brief EXTI0_IRQHandler: Interrupt handler for EXTI Line 0
*
* This function is the interrupt handler for EXTI Line 0. It toggles the state of the blue LED.
* It checks the interrupt status of EXTI Line 0 and clears the interrupt pending bit.
*/
void EXTI0_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line0) != RESET) // 判断中断位
{
LED_B_TOGGLE;
}
EXTI_ClearITPendingBit(EXTI_Line0); // 清除中断标志位
}
编写电平反转函数, 在bsp_led.h中
#define LED_B_TOGGLE {LED_B_GPIO_PORT->ODR ^= LED_B_GPIO_PIN;}
补充: 使能AFIO时钟
在STM32微控制器系列中,使用外部中断(EXTI)时需要开启AFIO(Alternate Function IO)时钟的原因与STM32的硬件设计和引脚复用功能有关。
AFIO的作用
- 引脚复用:STM32的GPIO(通用输入输出)引脚具有多功能性。一个物理引脚可以用作普通的I/O,也可以被配置为特殊功能,如USART、SPI、I2C通信或外部中断(EXTI)等。AFIO(Alternate Function IO)模块负责管理这些引脚的复用功能。
- EXTI配置:在STM32中,外部中断线(EXTI)可以映射到不同的GPIO引脚上。AFIO模块提供了这种映射功能。例如,如果你想将EXTI0配置为由PA0、PB0、PC0等其中一个引脚触发,就需要通过AFIO模块来设置这种映射。
开启AFIO时钟的原因
由于AFIO模块负责处理引脚的复用功能,包括EXTI的引脚映射,因此在使用EXTI功能之前,必须确保AFIO模块的时钟是使能的如果没有使能AFIO时钟,对AFIO寄存器的任何配置操作都不会生效,这意味着EXTI线路无法正确地映射到相应的GPIO引脚上,从而导致外部中断功能无法正常工作。
实际操作
在STM32的标准固件库或HAL(硬件抽象层)库中,通常会看到类似以下的代码片段,用于使能AFIO时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
或在使用HAL库时:
__HAL_RCC_AFIO_CLK_ENABLE();
这些函数调用确保了AFIO模块的时钟被使能,从而使得外部中断的相关配置(如引脚映射)能够正确执行。
总结
开启AFIO时钟是使用STM32的EXTI功能的必要步骤,因为AFIO模块控制着GPIO引脚的复用功能,包括将外部中断线路映射到特定的GPIO引脚。未使能AFIO时钟可能导致外部中断配置无效,进而影响整个中断处理机制的正常工作。
SysTick
SysTick简介
SysTick: 系统定时器, 24位, 只能递减, 存在于内核中, 嵌套在NVIC中, 所有的Cotex-M内核的单片机都具有这个定时器.
SysTick 功能框图
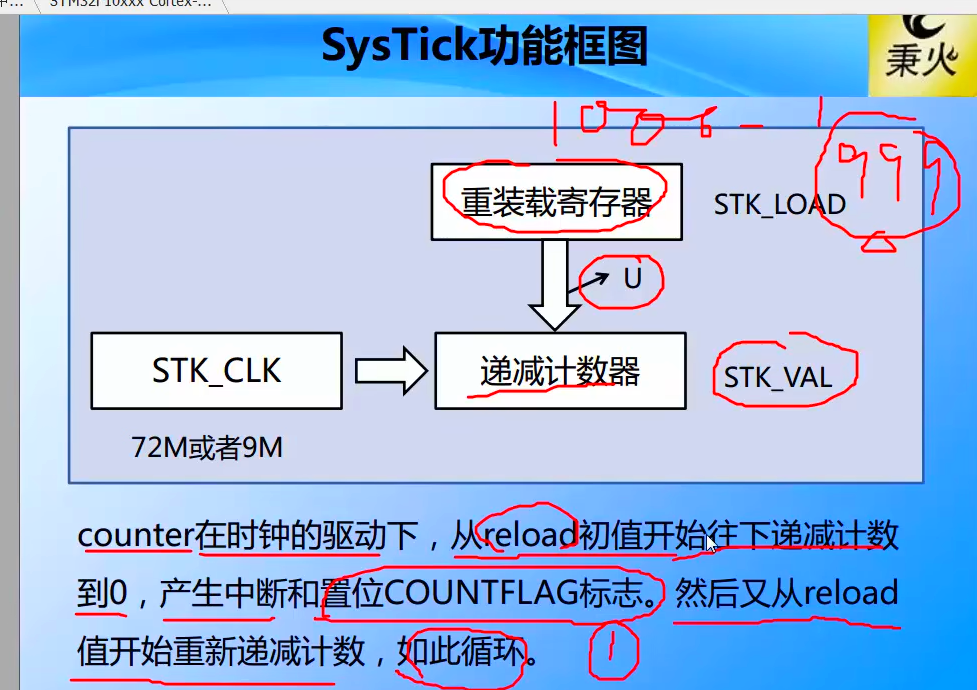
重装载寄存器把值写入递减计数器, 可通过STK_VAL实时查询其中的值, 递减计数器从reload值开始递减, 减为0后可产生中断并且置位COUNTFLAG标志位, 置位后从reload获取值重复以上操作
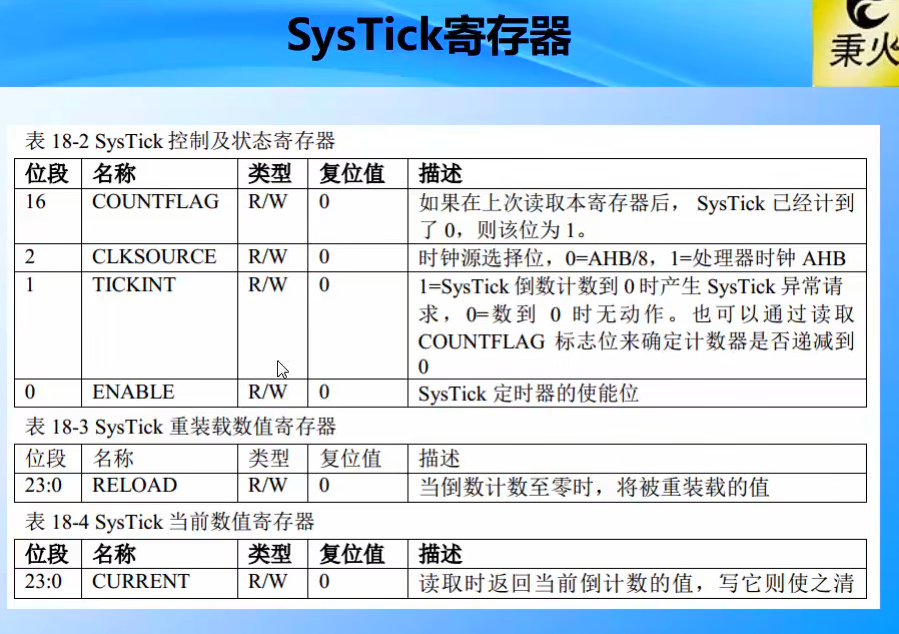
SysTick 寄存器描述
SysTick 定时时间计算
需要计算的参数
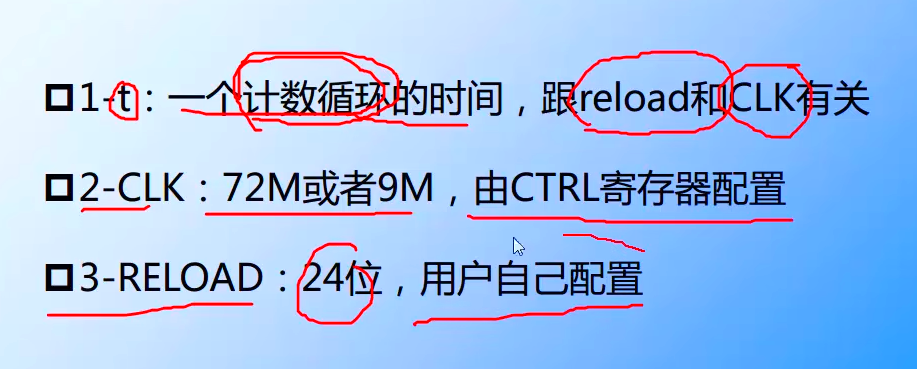
计算过程
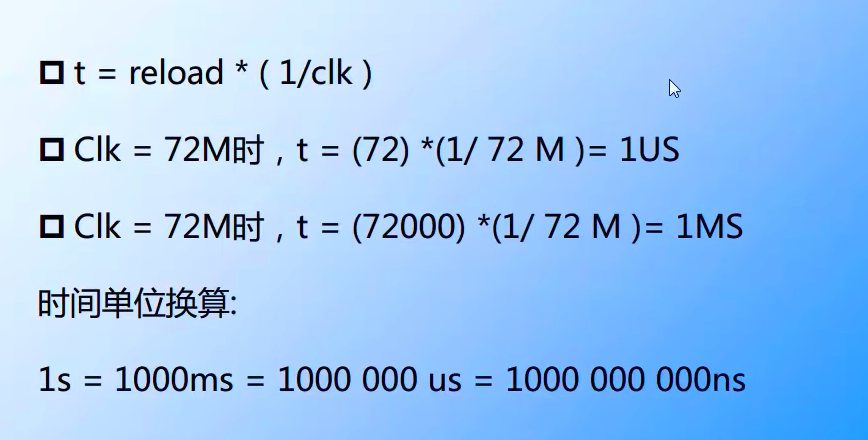
- Clk = 72M时
- reload = 72, t = 1us
- reload = 72000, t = 1ms
补充: SysTick 介绍
SysTick(System Tick Timer)是ARM Cortex-M微控制器内核的一个内置组件,用于提供一个简单但高效的系统定时器。这个定时器通常用于实现操作系统的节拍(tick),也可以用于简单的延时功能。
SysTick的主要特点
- 24位递减计数器:SysTick包含一个24位的递减计数器,当计数器值递减到零时,定时器溢出并触发一个中断。
- 可编程重载值:可以设置计数器的重载值,这决定了定时器的溢出时间间隔。
- 可配置的时钟源:SysTick定时器可以配置为使用内核时钟或外部时钟(通常是内核时钟的一半)。
- 自动重载:在计数到零时,计数器会自动重新加载预设的重载值,从而实现周期性定时。
- 中断功能:当计数器达到零时,SysTick定时器可以产生一个中断。这个中断可以用于各种定时任务,如操作系统的任务调度。
应用场景
- 操作系统节拍:在实时操作系统(RTOS)中,SysTick常用于生成操作系统的节拍,这对于任务调度和时间管理非常重要。
- 延时功能:在不需要RTOS的简单应用中,SysTick可用于生成精确的延时,例如在两个事件之间等待固定的时间。
- 时间基准:SysTick还可以作为程序中的时间基准,用于测量时间间隔或产生定时事件。
配置和使用
在使用SysTick时,一般需要进行以下配置:
- 设置重载值:根据所需的定时周期和时钟源频率设置重载值。
- 选择时钟源:选择使用内核时钟还是外部时钟作为SysTick的时钟源。
- 启用中断(可选):如果需要在定时器溢出时执行特定操作,可以启
用SysTick中断。 - 启动定时器:启用SysTick定时器开始计数
编程示例
在STM32等ARM Cortex-M微控制器上,SysTick的配置和使用通常涉及直接操作其控制和状态寄存器。以下是一个简单的示例:
SysTick_Config(SystemCoreClock / 1000); // 配置SysTick产生
SysTick 源码分析
SysTick_Type定义在core_cm3.h中
/** @addtogroup CMSIS_CM3_SysTick CMSIS CM3 SysTick
memory mapped structure for SysTick
@{
*/
typedef struct
{
__IO uint32_t CTRL; /*!< Offset: 0x00 SysTick Control and Status Register */
__IO uint32_t LOAD; /*!< Offset: 0x04 SysTick Reload Value Register */
__IO uint32_t VAL; /*!< Offset: 0x08 SysTick Current Value Register */
__I uint32_t CALIB; /*!< Offset: 0x0C SysTick Calibration Register */
} SysTick_Type;
SysTick_Config函数在core_cm3.h中定义
/**
* @brief Initialize and start the SysTick counter and its interrupt.
*
* @param ticks number of ticks between two interrupts
* @return 1 = failed, 0 = successful
*
* Initialise the system tick timer and its interrupt and start the
* system tick timer / counter in free running mode to generate
* periodical interrupts.
*/
static __INLINE uint32_t SysTick_Config(uint32_t ticks)
{
// 判断ticks的值是否大于2^24, 若大于则违法
if (ticks > SysTick_LOAD_RELOAD_Msk) return (1); /* Reload value impossible */
// 初始化reaload寄存器的值
SysTick->LOAD = (ticks & SysTick_LOAD_RELOAD_Msk) - 1; /* set reload register */
// 配置中断优先级, 配置为15, 默认为最低的优先级
/*-------------------------------------------------------------
* 注:
* 内核优先级的判断方式:
* 将内核外设的中断优先级的四个位按照外设的中断优先级进行分组
* 分组后可判断内核的抢占优先级和响应优先级
* 即人为分出抢占和响应优先级
*
* 例:
* 这里SysTick的中断优先级为15, 二进制为1111
* 若分组为2位抢占, 2位响应
* 则SysTick的抢占优先级为11即3, 响应优先级为11即3
* 若分组为1位抢占, 3位响应
* 则SysTick的抢占优先级为1即1, 响应优先级为111即7
* 通过该方法可以比较内核优先级与外设的优先级谁更高
* ----------------------------------------------------------*/
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1); /* set Priority for Cortex-M0 System Interrupts */
// 初始化counter的值为0
SysTick->VAL = 0; /* Load the SysTick Counter Value */
// 配置 SysTick的时钟为 72M
// 使能中断
// 使能 SysTick
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk; /* Enable SysTick IRQ and SysTick Timer */
return (0); /* Function successful */
}
SysTick 实验
项目地址: 19-SysTick
实验要求:
- 编写一个微妙延时函数
- 编写一个毫秒延时函数
在bsp_systick.c中编写微妙延时函数
/**
* @brief 延时指定的微秒数
* @param us 延时的微秒数
* @retval None
*/
void SysTick_Delay_us(uint32_t us)
{
SysTick_Config(SystemCoreClock / 1000000); // reload 设置为 72, t = 1us
for(int i = 0; i < us; i++)
{
while(!(SysTick->CTRL & (1 << 16)))
{
; // 等待CTRL的Bit16置1
}
}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk; // 状态位清除
}
在bsp_systick.c中编写毫秒延时函数
/**
* @brief 延时指定的毫秒数
* @param ms 延时的毫秒数
* @return 无
*/
void SysTick_Delay_ms(uint32_t ms)
{
SysTick_Config(SystemCoreClock / 1000); // reload 设置为 72000, t = 1ms
for(int i = 0; i < ms; i++)
{
while(!(SysTick->CTRL & (1 << 16)))
{
; // 等待CTRL的Bit16置1
}
}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk; // 状态位清除
}
在bsp_systick.h中引用库文件和进行函数声明
#ifndef __BSP_SYSTICK_H
#define __BSP_SYSTICK_H
#include "stm32f10x.h"
#include "core_cm3.h"
void SysTick_Delay_ms(uint32_t ms);
void SysTick_Delay_us(uint32_t us);
#endif // !__BSP_SYSTICK_H
在main.c中调用延时函数,实现LED闪烁
/**
* @brief Main function of the program.
*
* This function initializes the LED GPIO and enters an infinite loop.
* In each iteration of the loop, it turns off the blue LED, delays for 0.5 seconds,
* turns on the blue LED, and delays for 0.5 seconds again.
*
* @return int The exit status of the program.
*/
int main(void)
{
LED_GPIO_Config(); // Initialize the LED GPIO
while(1)
{
LED_B(OFF); // Turn off the blue LED
SysTick_Delay_ms(500); // Delay for 0.5 seconds
LED_B(ON); // Turn on the blue LED
SysTick_Delay_us(500000); // Delay for 0.5 seconds
}
}
通信的基本概念
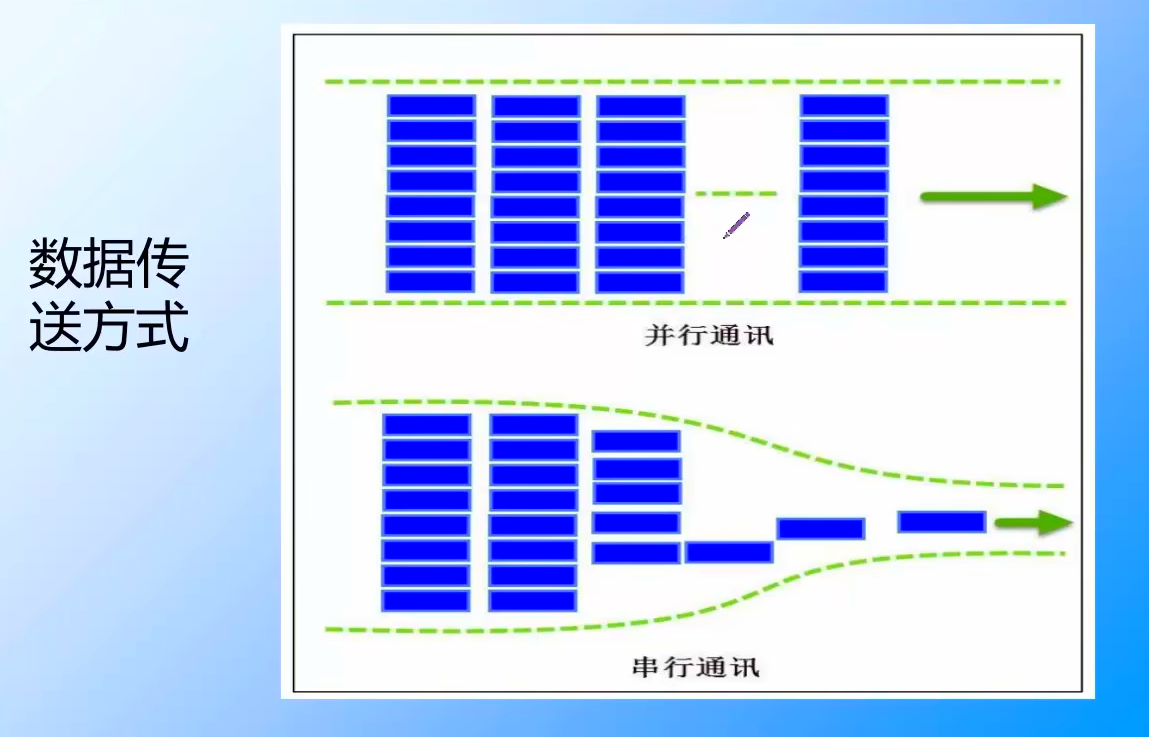
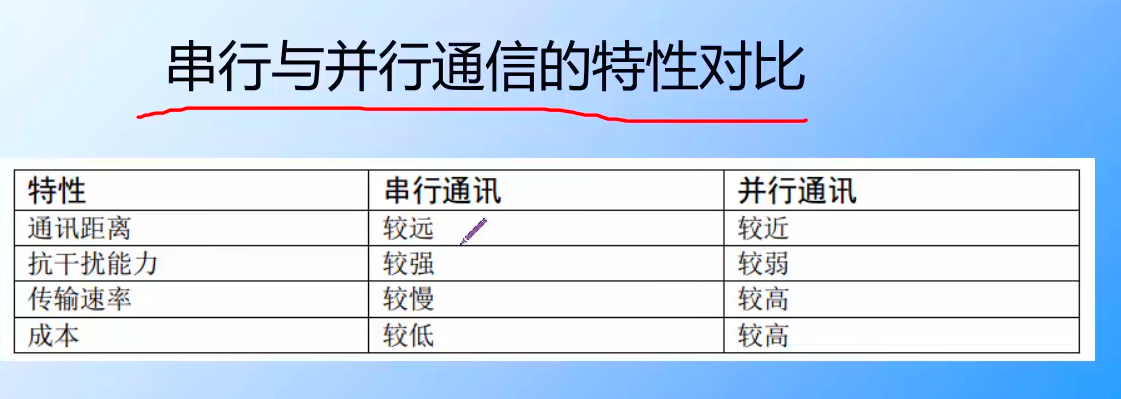
串行和并行通信
- 串行协议: USART, I2C, SPI, W500, CAN, LIN
- 并行协议: FSMC, SDIO
全双工, 半双工和单工
同步与异步
通过时钟信号进行同步, 保证数据传输的准确性
通过加入辅助的标识符, 保证数据传输的准确性
同步与异步的区别
通信的速率
当用一个二进制位表示一个码元时, 比特率和波特率相等
USART-串口通信
串口通信协议简介
物理层的常用标准
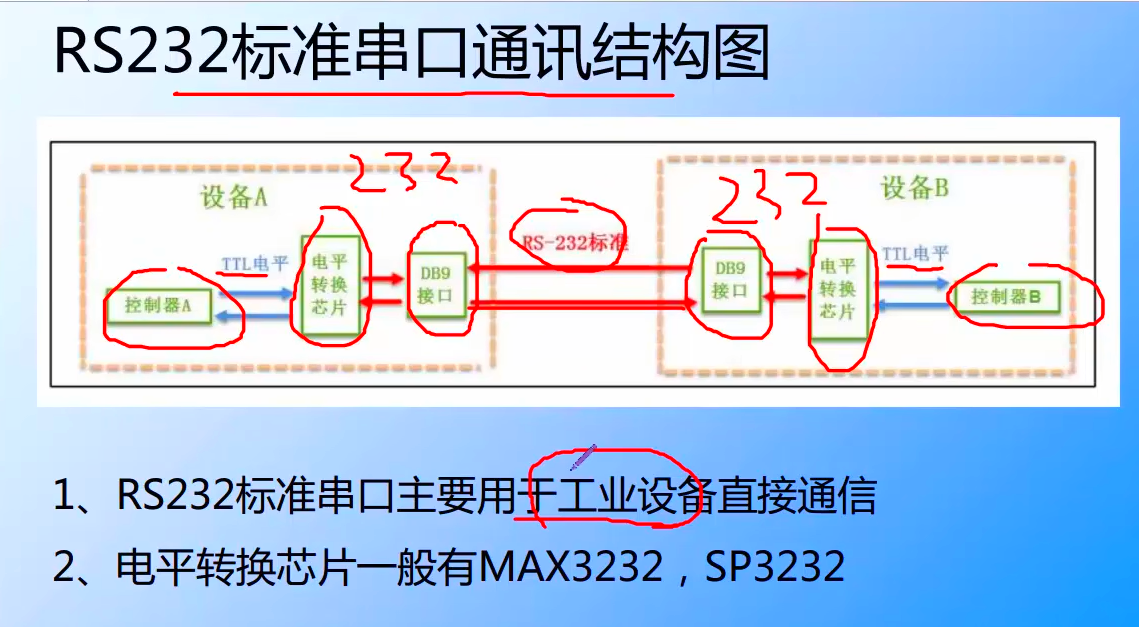
232和TTL电平区别
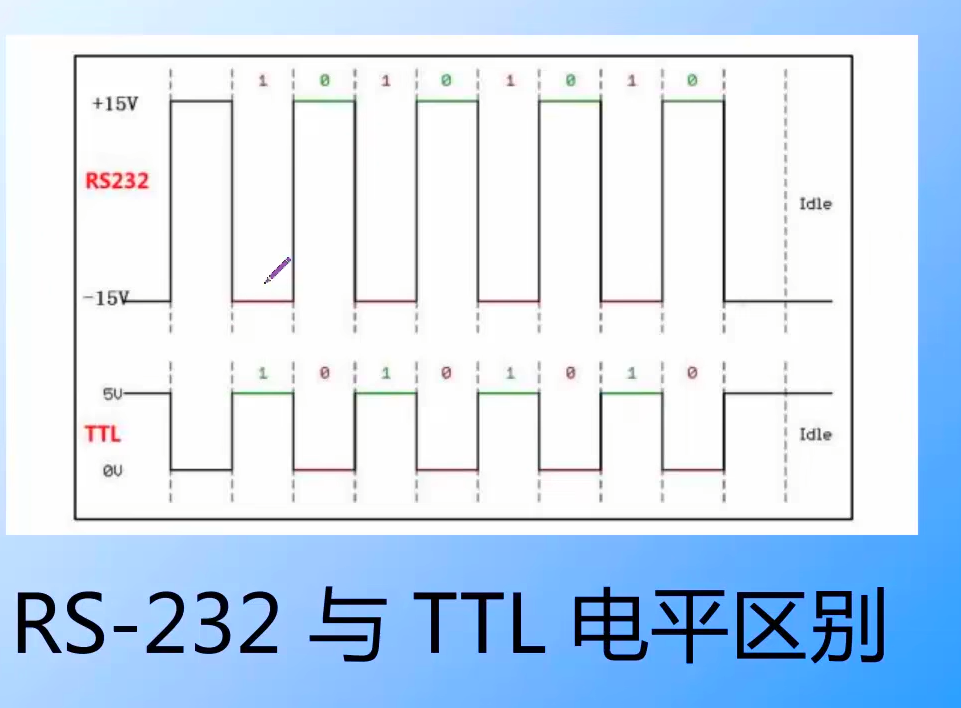
- TTL: 从芯片出来的基本是TTL电平
- 232: 负逻辑, 压差大
232通信通讯结构图
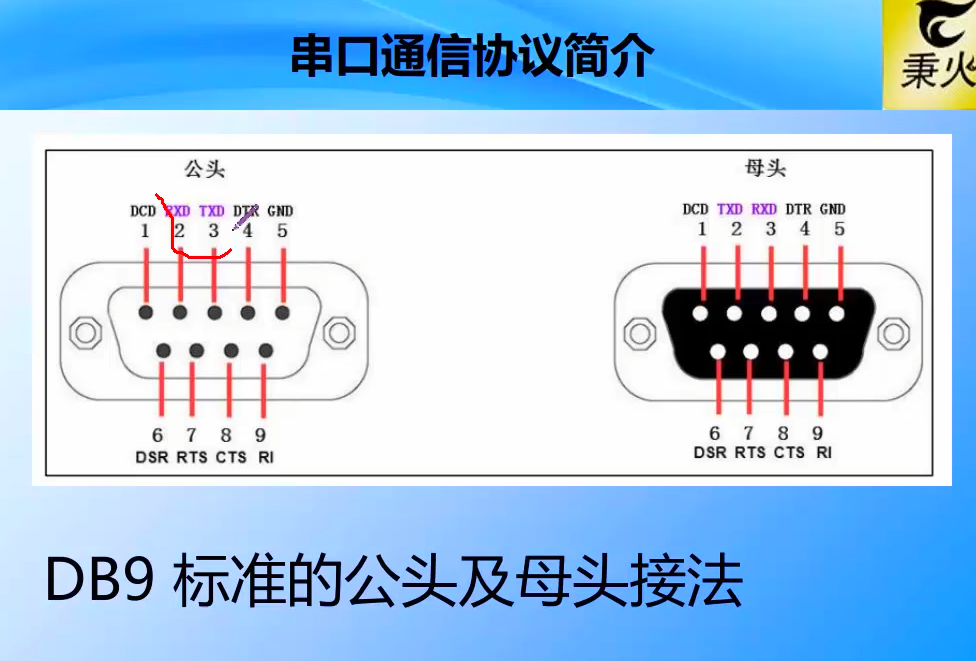
DB9接口图
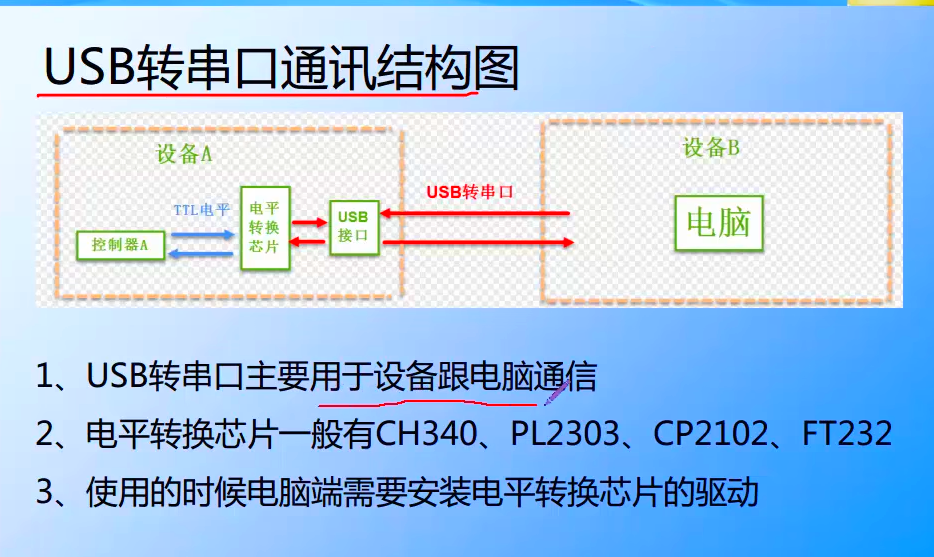
USB转串口通讯结构图
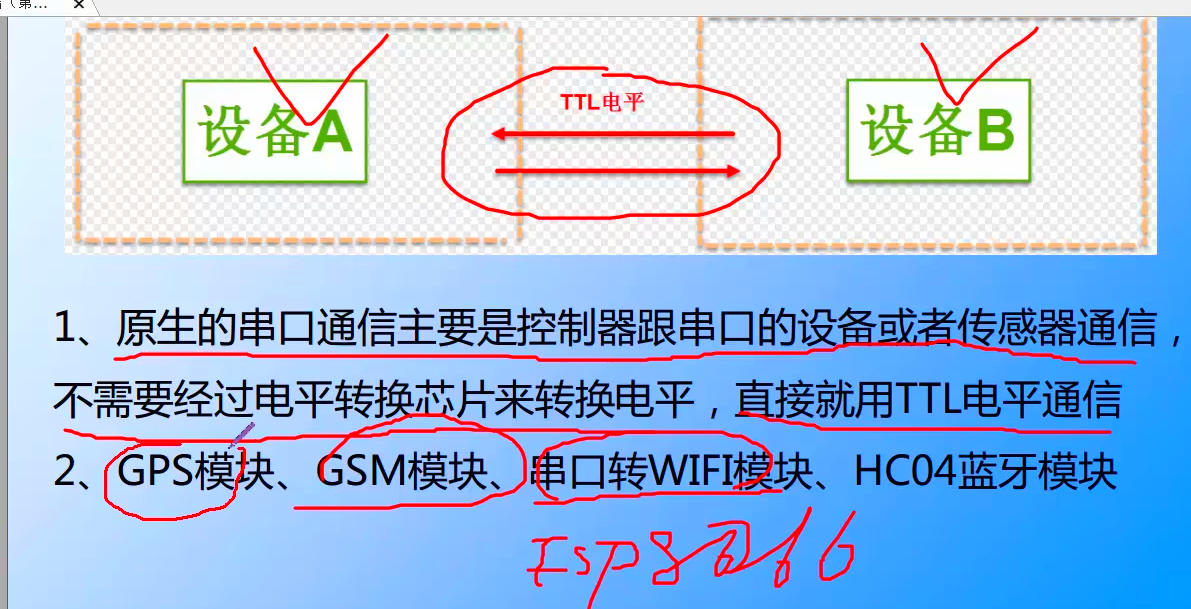
串口到串口通讯结构图
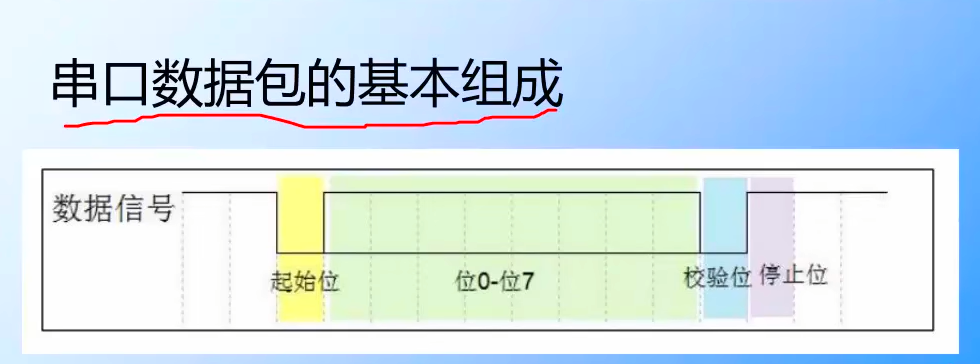
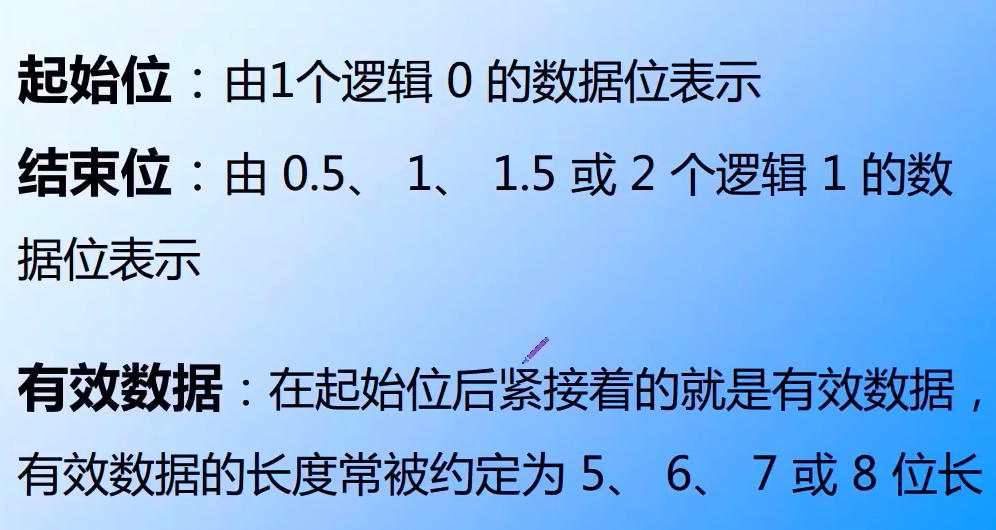
串口数据包的组成
STM32串口功能框图讲解
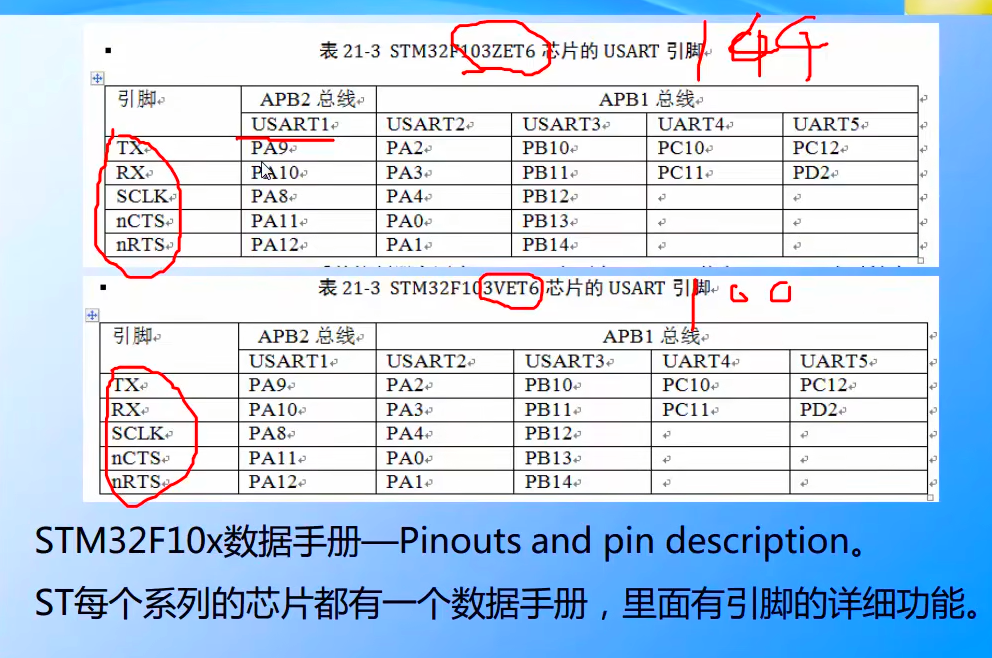
引脚部分讲解
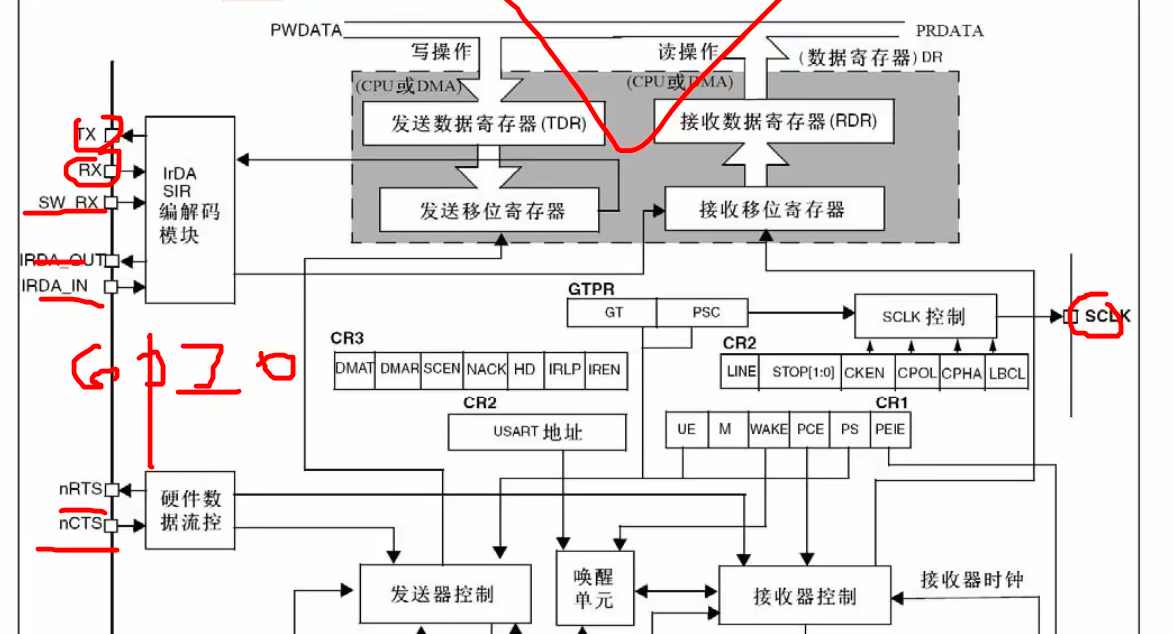
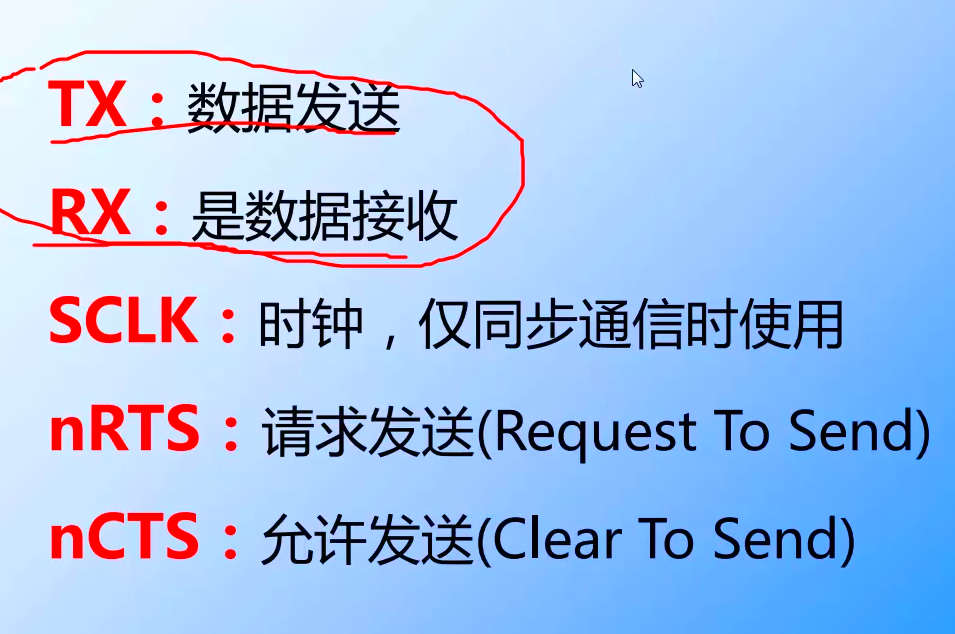
引脚对应
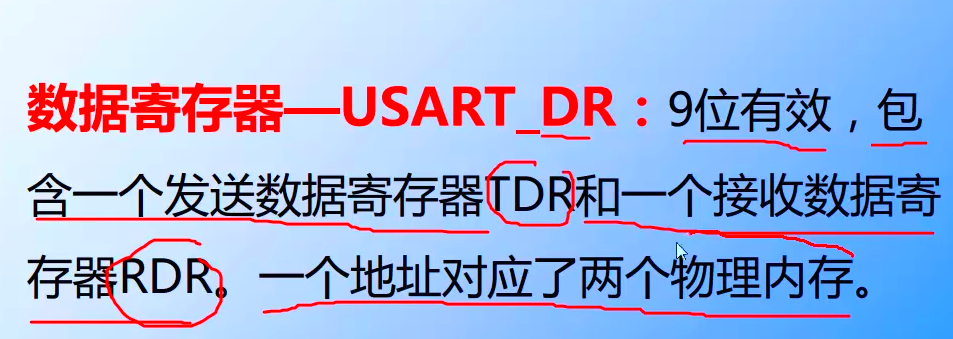
数据寄存器部分
数据格式
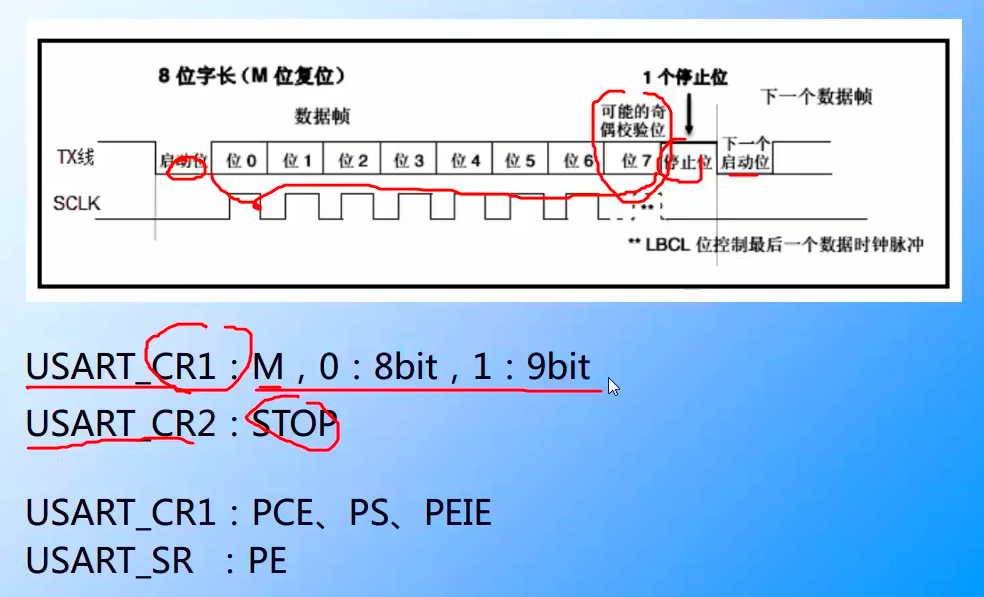
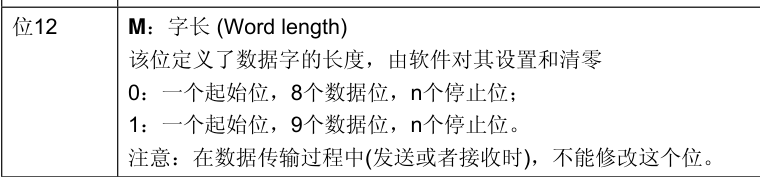
USART_CR1的bit12 M控制字长
USART_CR2的bit[13:12] STOP控制停止位的位数
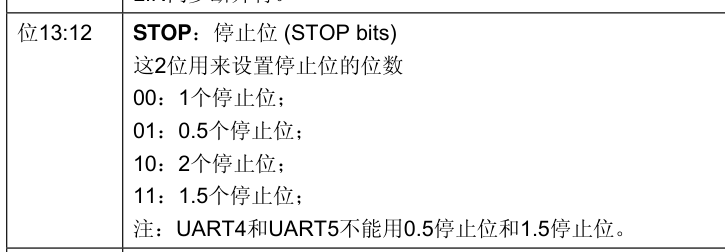
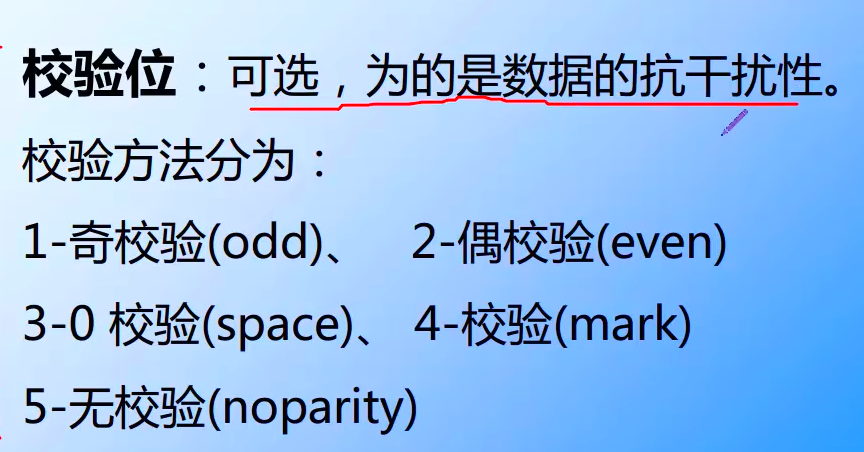
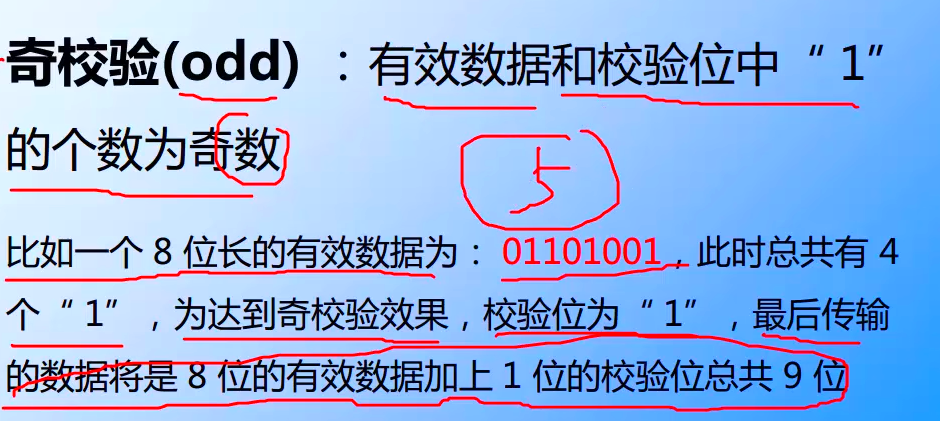
USART_CR1的bit10(PSE), bit9(PS)来使能校验和选择校验模式
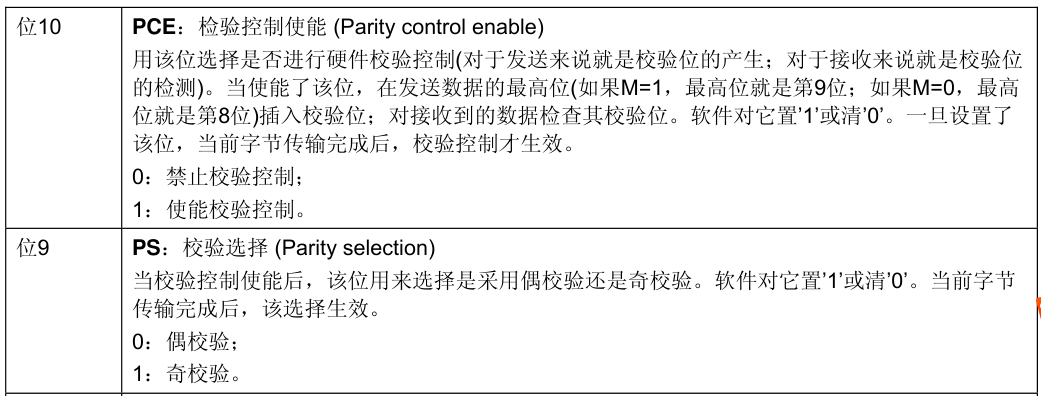
USART_CR1的bit8(PEIE)来使能中断

USART_SR的bit0(PE)来检测校验错误

发送数据部分
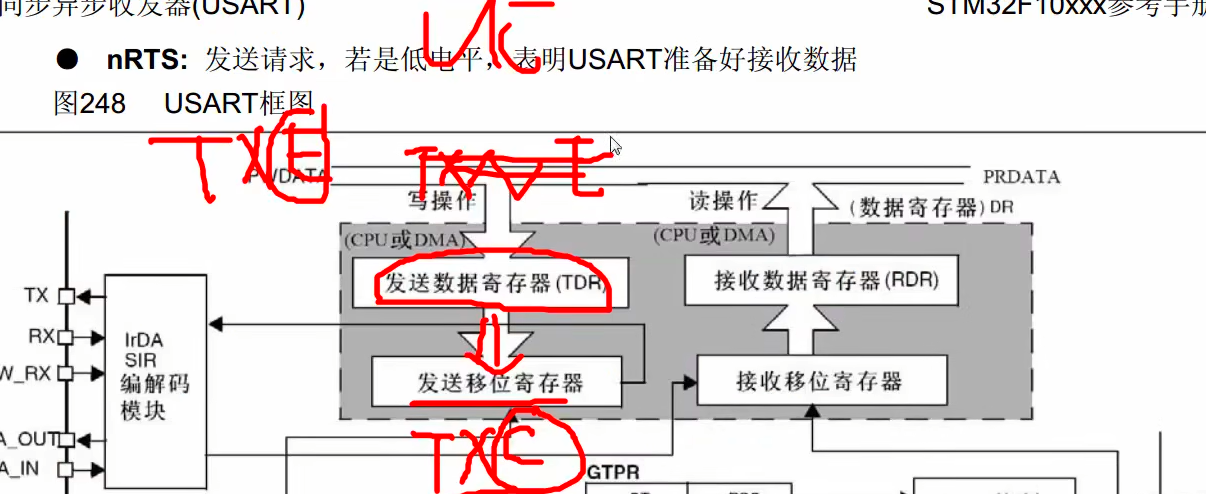
- 先将USART_CR1的UE位置1(使能USART模块), 再将USART_CR1的TE位置1(使能发送)
- 数据从CPU或DMA中写入发送数据寄存器(TDR), TDR发送完毕后, USART_SR的TXE位置1(数据已经被转移到移位寄存器中)
- 发送移位寄存器发送完毕后, USART_SR的TC位置1(表示发送完成)
接收数据部分
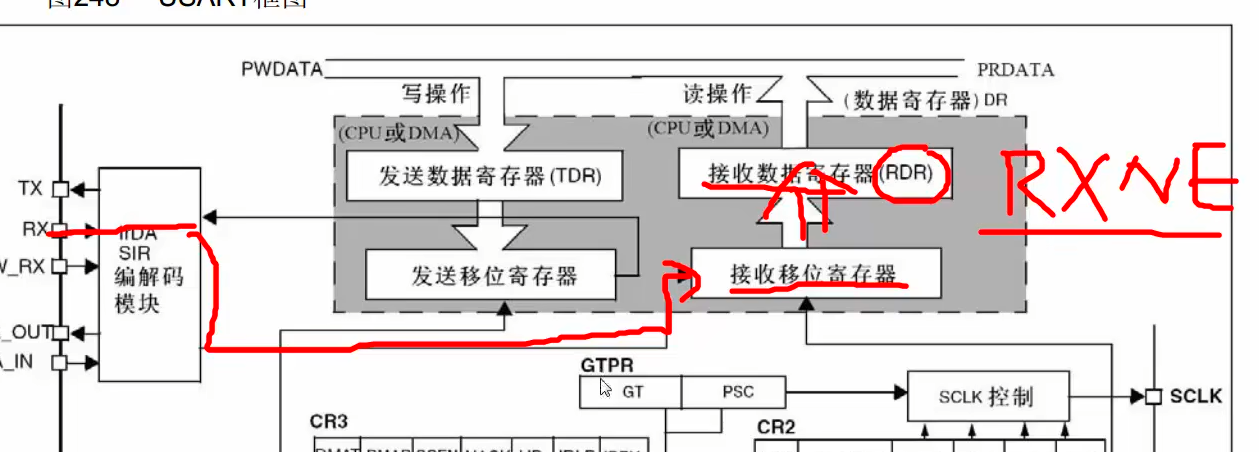
- 先将USART_CR1的UE位置1(使能USART模块), 再将USART_CR1的RE位置1(使能接收)
- 数据从RX到接收移位寄存器到接收数据寄存器(RDR), 接收完毕后, USART_SR的RXNE位置1(收到数据, 可以读出)
波特率设置
使用USART_BRR进行配置
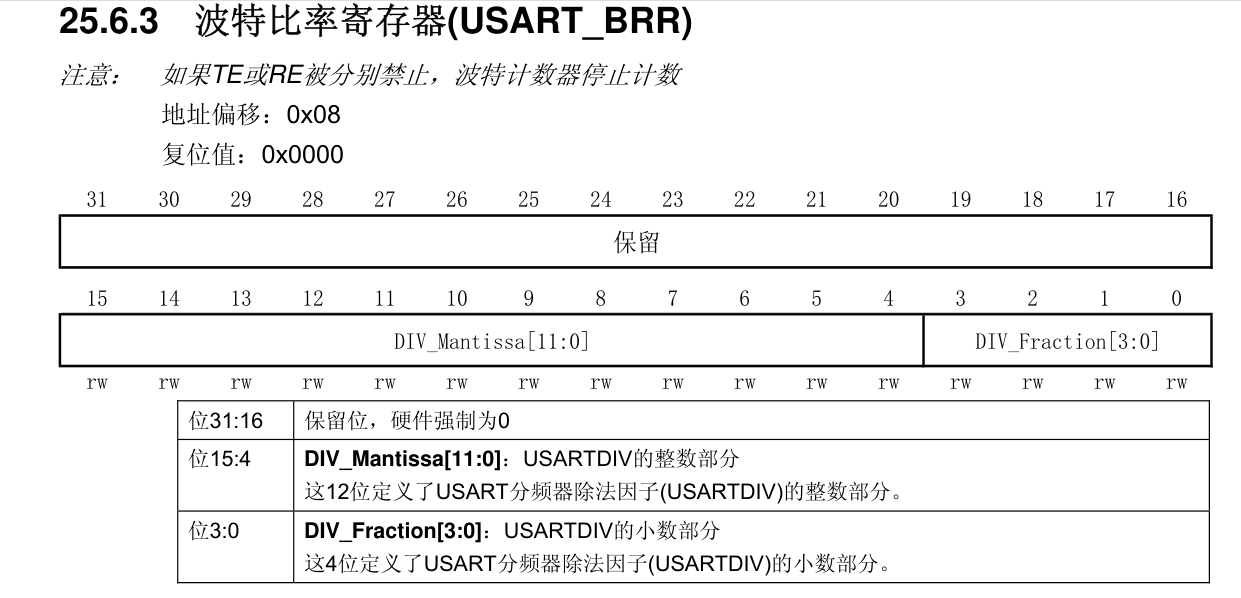
波特率的计算公式
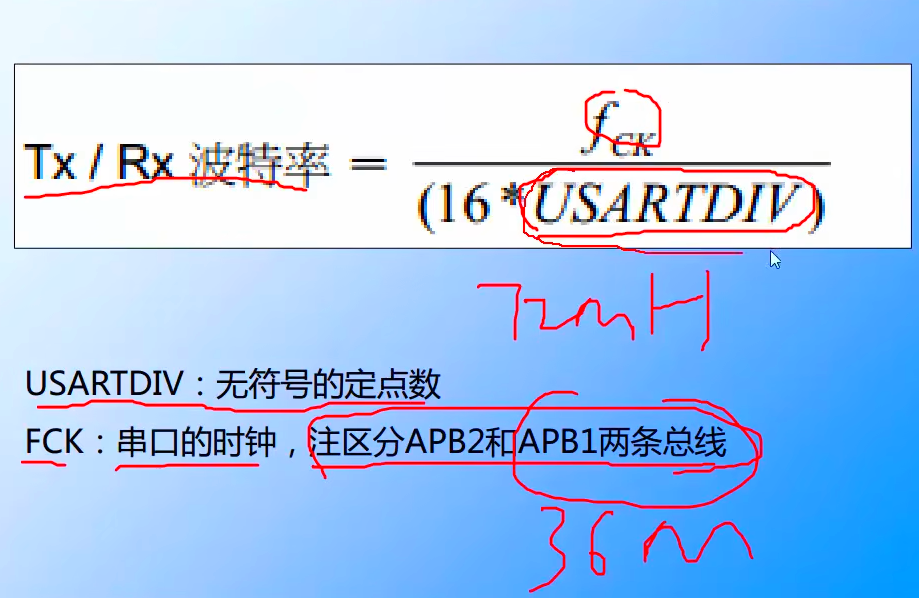
- APB2时钟: 72MHz, 挂载USART1
- APB1时钟: 36MHz, 挂载USART2, 3, 4, 5
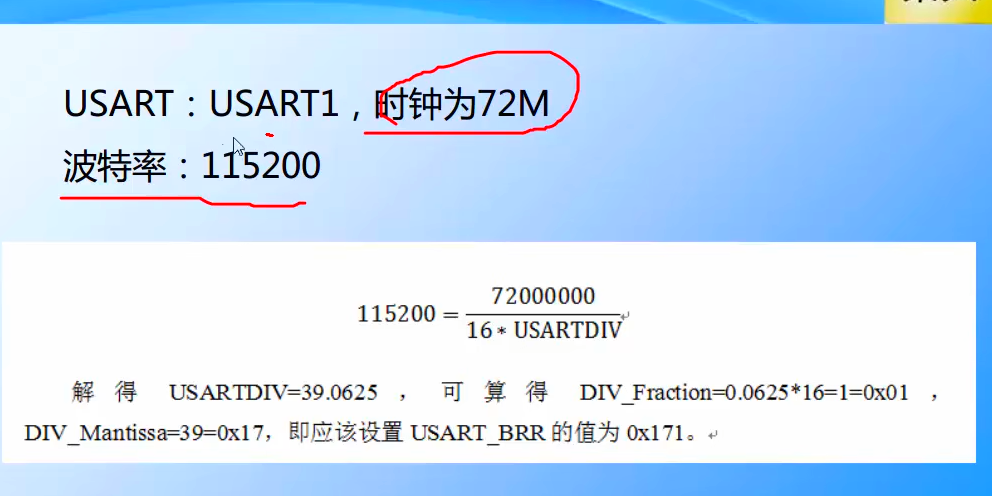
串口初始化结构体和固件库讲解
在stm32f10x_usart.h中定义串口初始化结构体(异步)
/**
* @brief USART Init Structure definition
*/
typedef struct
{
// 设置波特率
uint32_t USART_BaudRate; /*!< This member configures the USART communication baud rate.
The baud rate is computed using the following formula:
- IntegerDivider = ((PCLKx) / (16 * (USART_InitStruct->USART_BaudRate)))
- FractionalDivider = ((IntegerDivider - ((u32) IntegerDivider)) * 16) + 0.5 */
// 设置字长
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_WordLength_8b ((uint16_t)0x0000)
* #define USART_WordLength_9b ((uint16_t)0x1000)
* ---------------------------------------------------------------------------*/
uint16_t USART_WordLength; /*!< Specifies the number of data bits transmitted or received in a frame.
This parameter can be a value of @ref USART_Word_Length */
// 设置停止位
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_StopBits_1 ((uint16_t)0x0000)
* #define USART_StopBits_0_5 ((uint16_t)0x1000)
* #define USART_StopBits_2 ((uint16_t)0x2000)
* #define USART_StopBits_1_5 ((uint16_t)0x3000)
* ---------------------------------------------------------------------------*/
uint16_t USART_StopBits; /*!< Specifies the number of stop bits transmitted.
This parameter can be a value of @ref USART_Stop_Bits */
// 设置校验
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_Parity_No ((uint16_t)0x0000)
* #define USART_Parity_Even ((uint16_t)0x0400)
* #define USART_Parity_Odd ((uint16_t)0x0600)
* ---------------------------------------------------------------------------*/
uint16_t USART_Parity; /*!< Specifies the parity mode.
This parameter can be a value of @ref USART_Parity
@note When parity is enabled, the computed parity is inserted
at the MSB position of the transmitted data (9th bit when
the word length is set to 9 data bits; 8th bit when the
word length is set to 8 data bits). */
// 设置模式
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_Mode_Rx ((uint16_t)0x0004)
* #define USART_Mode_Tx ((uint16_t)0x0008)
* ---------------------------------------------------------------------------*/
uint16_t USART_Mode; /*!< Specifies wether the Receive or Transmit mode is enabled or disabled.
This parameter can be a value of @ref USART_Mode */
// 设置硬件控制流
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_HardwareFlowControl_None ((uint16_t)0x0000)
* #define USART_HardwareFlowControl_RTS ((uint16_t)0x0100)
* #define USART_HardwareFlowControl_CTS ((uint16_t)0x0200)
* #define USART_HardwareFlowControl_RTS_CTS ((uint16_t)0x0300)
* ---------------------------------------------------------------------------*/
uint16_t USART_HardwareFlowControl; /*!< Specifies wether the hardware flow control mode is enabled
or disabled.
This parameter can be a value of @ref USART_Hardware_Flow_Control */
} USART_InitTypeDef;
在stm32f10x_usart.h中定义串口初始化结构体(同步)
/**
* @brief USART Clock Init Structure definition
*/
typedef struct
{
// 设置使能时钟
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_Clock_Disable ((uint16_t)0x0000)
* #define USART_Clock_Enable ((uint16_t)0x0800)
* ---------------------------------------------------------------------------*/
uint16_t USART_Clock; /*!< Specifies whether the USART clock is enabled or disabled.
This parameter can be a value of @ref USART_Clock */
// 设置时钟的极性, 即总线空闲时CK引脚保持低电平还是高电平
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_CPOL_Low ((uint16_t)0x0000)
* #define USART_CPOL_High ((uint16_t)0x0400)
* ---------------------------------------------------------------------------*/
uint16_t USART_CPOL; /*!< Specifies the steady state value of the serial clock.
This parameter can be a value of @ref USART_Clock_Polarity */
// 设置时钟的相位, 即数据采样的时机为第一个边沿还是第二个边沿
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_CPHA_1Edge ((uint16_t)0x0000)
* #define USART_CPHA_2Edge ((uint16_t)0x0200)
* ---------------------------------------------------------------------------*/
uint16_t USART_CPHA; /*!< Specifies the clock transition on which the bit capture is made.
This parameter can be a value of @ref USART_Clock_Phase */
// 设置时钟的最后一个数据位的时钟脉冲是否输出到SCLK引脚
/*-----------------------------------------------------------------------------
* 参数如下:
* #define USART_LastBit_Disable ((uint16_t)0x0000)
* #define USART_LastBit_Enable ((uint16_t)0x0100)
* ---------------------------------------------------------------------------*/
uint16_t USART_LastBit; /*!< Specifies whether the clock pulse corresponding to the last transmitted
data bit (MSB) has to be output on the SCLK pin in synchronous mode.
This parameter can be a value of @ref USART_Last_Bit */
} USART_ClockInitTypeDef;
- 串口初始化函数: void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
- 中断配置函数: void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
- 串口使能函数: void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
- 数据发送函数: void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
- 数据接收函数: void USART_ReceiveData(USART_TypeDef* USARTx);
- 中断状态位获取函数: ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
USB转串口的硬件原理图
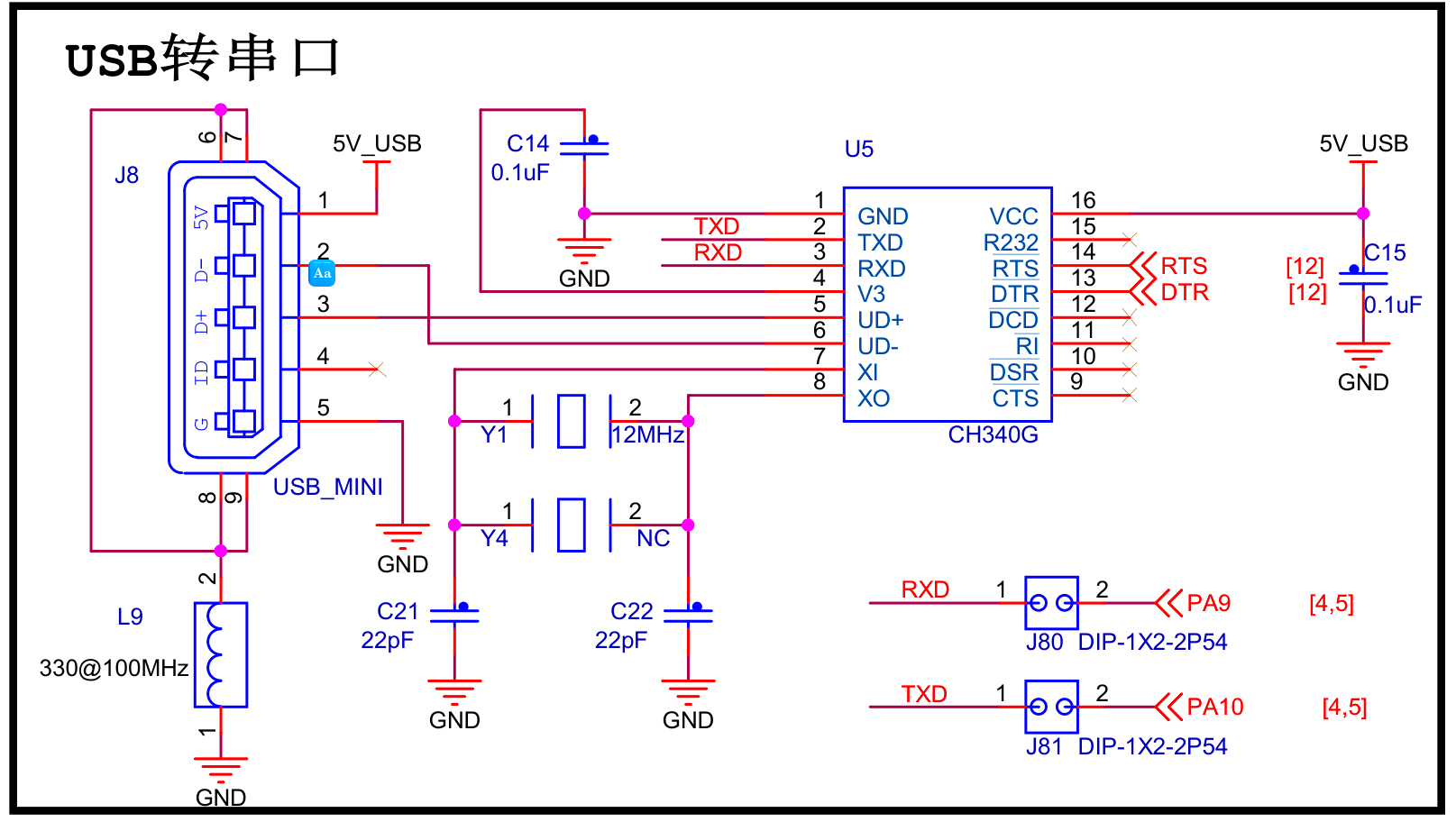
串口GPIO汇总
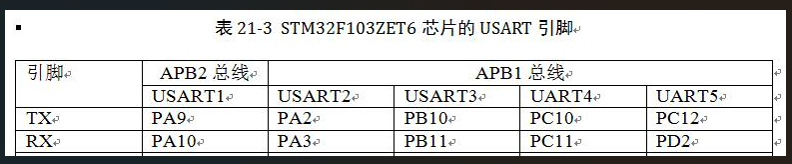
补充: 外设的GPIO配置
在STM32F10x参考手册中的8.1.11节可找到外设的GPIO配置, 其中关于USART部分的GPIO配置如下图
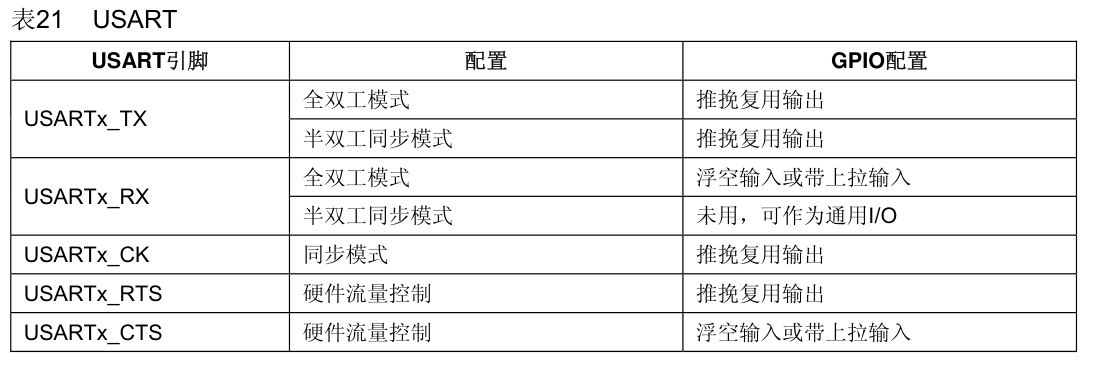
配置串口助手
本项目使用的串口助手: 野火多功能调试助手V1.0.2.9
串口配置如下图(串口配置参数与串口的初始化配置有关, 该配置符合下文代码的初始化)
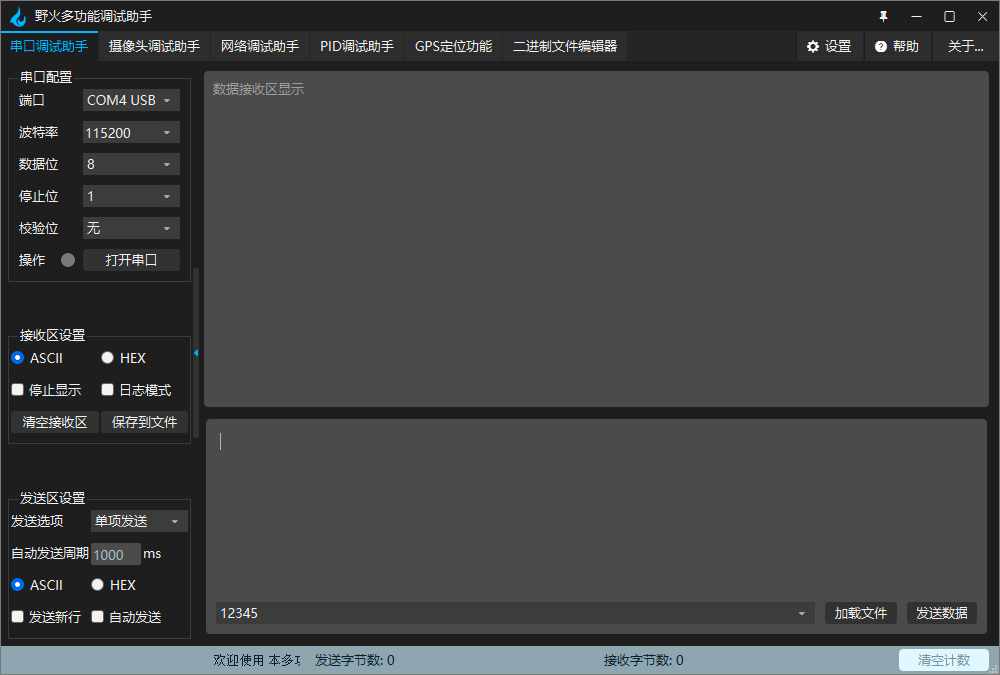
USART接收和发送实验
项目地址 : 21-USART-接收和发送
实验需求: 单片机给电脑发送数据, 电脑上位机把数据打印出来; 电脑上位机给单片机发数据, 单片机接收到数据之后立马发回给电脑, 并打印出来.
在bsp_usart.h中进行串口的宏定义, 并使用条件编译来选择串口
/**
* 串口宏定义,不同的串口挂载的总线和IO不一样,移植时需要修改这几个宏
* 1-修改总线时钟的宏,uart1挂载到apb2总线,其他uart挂载到apb1总线
* 2-修改GPIO的宏
*/
// 通过条件编译选择串口, 使用的串口置1,其余置0
#define DEBUG_USART1 1
#define DEBUG_USART2 0
#define DEBUG_USART3 0
#define DEBUG_USART4 0
#define DEBUG_USART5 0
#if DEBUG_USART1
// 串口1-USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandler
#elif DEBUG_USART2
// 串口2-USART2
#define DEBUG_USARTx USART2
#define DEBUG_USART_CLK RCC_APB1Periph_USART2
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_2
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_3
#define DEBUG_USART_IRQ USART2_IRQn
#define DEBUG_USART_IRQHandler USART2_IRQHandler
#elif DEBUG_USART3
// 串口3-USART3
#define DEBUG_USARTx USART3
#define DEBUG_USART_CLK RCC_APB1Periph_USART3
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOB)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOB
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_RX_GPIO_PORT GPIOB
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_11
#define DEBUG_USART_IRQ USART3_IRQn
#define DEBUG_USART_IRQHandler USART3_IRQHandler
#elif DEBUG_USART4
//串口4-UART4
#define DEBUG_USARTx UART4
#define DEBUG_USART_CLK RCC_APB1Periph_UART4
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOC)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOC
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_RX_GPIO_PORT GPIOC
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_11
#define DEBUG_USART_IRQ UART4_IRQn
#define DEBUG_USART_IRQHandler UART4_IRQHandler
#elif DEBUG_UART5
// 串口5-UART5
#define DEBUG_USARTx UART5
#define DEBUG_USART_CLK RCC_APB1Periph_UART5
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOC
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_12
#define DEBUG_USART_RX_GPIO_PORT GPIOD
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_2
#define DEBUG_USART_IRQ UART5_IRQn
#define DEBUG_USART_IRQHandler UART5_IRQHandler
#endif
在bsp_usart.c中编写usart的初始化函数
/**
* @brief USART GPIO 配置,工作参数配置
* @param 无
* @retval 无
*/
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
在bsp_usart.c中编写串口中断优先级配置函数
/**
* @brief 配置嵌套向量中断控制器NVIC
* @param 无
* @retval 无
*/
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中断控制器组选择 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置USART为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}
在bsp_usart.c中编写发送一个字节到串口的函数
/**
* @brief 发送一个字节到指定的USART外设
*
* @param pUSARTx USART外设指针
* @param ch 要发送的字节
*/
void Usart_SendByte(USART_TypeDef* pUSARTx, uint8_t ch)
{
// 发送一个字节
USART_SendData(pUSARTx, ch);
// 等待发送数据寄存器为空
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET)
{
;
}
}
在bsp_usart.c中编写发送两个字节到串口的函数
/**
* @brief 发送两个字节的数据
*
* @param pUSARTx USART外设指针
* @param ch 要发送的16位数据
*/
void Usart_SendHalfWord(USART_TypeDef* pUSARTx, uint16_t ch)
{
uint8_t tmp_h, tmp_l;
tmp_h = (ch & 0xFF00) >> 8; // 取出高八位
tmp_l = (ch & 0xFF) >> 0; // 取出低八位
USART_SendData(pUSARTx, tmp_h); // 发送高八位
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET)
{
;
}
USART_SendData(pUSARTx, tmp_l); // 发送低八位
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET)
{
;
}
}
在bsp_usart.c中编写发送数组的函数
/**
* @brief Sends an array of bytes over USART.
*
* This function sends an array of bytes over the specified USART peripheral.
*
* @param pUSARTx The USART peripheral to use.
* @param array Pointer to the array of bytes to send.
* @param num The number of bytes to send.
*/
void Usart_SendArray(USART_TypeDef* pUSARTx, uint8_t* array, uint16_t num)
{
for(uint16_t i = 0; i < num; i++)
{
Usart_SendByte(pUSARTx, array[i]);
}
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET)
{
;
}
}
在bsp_usart.c中编写发送字符串的函数
/**
* @brief 发送字符串到USART外设
*
* @param pUSARTx USART外设指针
* @param str 要发送的字符串
*/
void Usart_SendString(USART_TypeDef* pUSARTx, uint8_t* str)
{
// 发送数据
uint8_t i = 0;
do
{
Usart_SendByte(pUSARTx, *(str + i));
i++;
} while (*(str + i) != '\0');
// 等待发送完成
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET)
{
;
}
}
在bsp_usart.c中编写重定向标准输出输入函数, 使得串口可使用scanf printf等函数
// 重定向c库函数printf, putchar到串口,重定向后可使用printf, putchar函数
/**
* @brief 重定向标准输出函数
* @param ch 要发送的字符
* @param f 文件指针
* @retval 发送的字符
*/
int fputc(int ch, FILE* f)
{
USART_SendData(DEBUG_USARTx, (uint8_t)ch);
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET)
{
;
}
return (ch);
}
/**
* @brief 重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
*
* @param f 文件指针
* @return int 从串口接收到的数据
*/
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
在main.c函数中进行测试
#include "stm32f10x.h"
#include "bsp_led.h"
#include "bsp_usart.h"
int main(void)
{
USART_Config(); // 初始化USART
// 发送1字节数据
Usart_SendByte(DEBUG_USARTx, 'a');
Usart_SendByte(DEBUG_USARTx, '\n');
// 发送2字节数据
Usart_SendHalfWord(DEBUG_USARTx, 0xFF56);
// 发送数组
Usart_SendArray(DEBUG_USARTx, (uint8_t*)"Hello World!", 11);
uint8_t array[11] = {"Hello World!"};
Usart_SendArray(DEBUG_USARTx, array, 11);
// 发送字符串
Usart_SendString(DEBUG_USARTx, "\nString: Hello World\n");
// 重定向printf函数
printf("printf: Hello World\n");
// 重定向putchar函数
putchar('p');
putchar('u');
putchar('t');
putchar('c');
putchar('h');
putchar('a');
putchar('r');
putchar('\n');
while(1)
{
;
}
}
在stm32f10x_it.c中编写中断服务函数实现串口数据的接收并发送
/**
* @brief Interrupt handler for the DEBUG_USART.
*
* This function is called when there is a receive interrupt from the DEBUG_USART.
* It receives data from the DEBUG_USART and sends it back.
*/
void DEBUG_USART_IRQHandler(void)
{
uint8_t ucTemp;
if(USART_GetITStatus(DEBUG_USARTx, USART_IT_RXNE) != RESET)
{
ucTemp = USART_ReceiveData(DEBUG_USARTx); // Receive data into ucTemp
USART_SendData(DEBUG_USARTx, ucTemp); // Send data
}
}
补充: 通过重写fputc函数重定向C库函数printf到串口
通过重写 fputc 函数可以实现重定向 printf 到串口的效果。这是因为 printf 函数实际上是通过 C 标准库中的输出函数 fputc 来将字符一个个地发送到输出设备的。当你重写了 fputc 函数,实际上就改变了字符的输出方式,使得字符被发送到你所定义的输出设备,比如串口。
下面是一个简单的示例,演示了如何通过重写 fputc 函数来重定向 printf 到串口。这里假设你已经在系统中初始化了串口的硬件。
#include <stdio.h>
// 串口初始化函数,假设已经在系统中实现
void initSerialPort() {
// 串口初始化的相关代码
}
// 重定向标准输出函数
int fputc(int ch, FILE *f) {
// 将字符发送到串口
// 你需要在这里添加实际的串口发送代码
// 例如:sendCharacterToSerialPort(ch);
return ch;
}
int main() {
// 初始化串口
initSerialPort();
// 在这之后,调用printf将输出信息发送到串口
printf("Hello, Serial Port!\n");
// 其他代码...
return 0;
}
在这个示例中,我们重写了 fputc 函数,使其将字符发送到串口。当 printf 调用 fputc 函数时,字符就会被发送到串口。这样就实现了将 printf 输出重定向到串口的效果。
需要注意的是,具体的串口发送函数实现(比如 sendCharacterToSerialPort)需要根据你的具体硬件和系统来编写。这个示例只是演示了重定向的基本原理。
USART控制RGB灯实验
项目地址 : 21-USART-控制RGB灯
实验需求: 电脑给单片机发命令, 用于控制开发板上的RGB灯.
在bsp_led.h中定义RGB灯的宏
#ifndef __LED_H
#define __LED_H
#include "stm32f10x.h"
/* 定义LED连接的GPIO端口, 用户只需要修改下面的代码即可改变控制的LED引脚 */
// R-红色
#define LED1_GPIO_PORT GPIOB /* GPIO端口 */
#define LED1_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define LED1_GPIO_PIN GPIO_Pin_5 /* 连接到SCL时钟线的GPIO */
// G-绿色
#define LED2_GPIO_PORT GPIOB /* GPIO端口 */
#define LED2_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define LED2_GPIO_PIN GPIO_Pin_0 /* 连接到SCL时钟线的GPIO */
// B-蓝色
#define LED3_GPIO_PORT GPIOB /* GPIO端口 */
#define LED3_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define LED3_GPIO_PIN GPIO_Pin_1 /* 连接到SCL时钟线的GPIO */
/** the macro definition to trigger the led on or off
* 1 - off
*0 - on
*/
#define ON 0
#define OFF 1
/* 使用标准的固件库控制IO*/
#define LED1(a) if (a) \
GPIO_SetBits(LED1_GPIO_PORT,LED1_GPIO_PIN);\
else \
GPIO_ResetBits(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED2(a) if (a) \
GPIO_SetBits(LED2_GPIO_PORT,LED2_GPIO_PIN);\
else \
GPIO_ResetBits(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED3(a) if (a) \
GPIO_SetBits(LED3_GPIO_PORT,LED3_GPIO_PIN);\
else \
GPIO_ResetBits(LED3_GPIO_PORT,LED3_GPIO_PIN)
/* 直接操作寄存器的方法控制IO */
#define digitalHi(p,i) {p->BSRR=i;} //输出为高电平
#define digitalLo(p,i) {p->BRR=i;} //输出低电平
#define digitalToggle(p,i) {p->ODR ^=i;} //输出反转状态
/* 定义控制IO的宏 */
#define LED1_TOGGLE digitalToggle(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED1_OFF digitalHi(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED1_ON digitalLo(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED2_TOGGLE digitalToggle(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED2_OFF digitalHi(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED2_ON digitalLo(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED3_TOGGLE digitalToggle(LED3_GPIO_PORT,LED3_GPIO_PIN)
#define LED3_OFF digitalHi(LED3_GPIO_PORT,LED3_GPIO_PIN)
#define LED3_ON digitalLo(LED3_GPIO_PORT,LED3_GPIO_PIN)
/* 基本混色,后面高级用法使用PWM可混出全彩颜色,且效果更好 */
//红
#define LED_RED \
LED1_ON;\
LED2_OFF\
LED3_OFF
//绿
#define LED_GREEN \
LED1_OFF;\
LED2_ON\
LED3_OFF
//蓝
#define LED_BLUE \
LED1_OFF;\
LED2_OFF\
LED3_ON
//黄(红+绿)
#define LED_YELLOW \
LED1_ON;\
LED2_ON\
LED3_OFF
//紫(红+蓝)
#define LED_PURPLE \
LED1_ON;\
LED2_OFF\
LED3_ON
//青(绿+蓝)
#define LED_CYAN \
LED1_OFF;\
LED2_ON\
LED3_ON
//白(红+绿+蓝)
#define LED_WHITE \
LED1_ON;\
LED2_ON\
LED3_ON
//黑(全部关闭)
#define LED_RGBOFF \
LED1_OFF;\
LED2_OFF\
LED3_OFF
void LED_GPIO_Config(void);
#endif /* __LED_H */
在bsp_led.c中编写led初始化函数
/**
******************************************************************************
* @file bsp_led.c
* @author fire
* @version V1.0
* @date 2013-xx-xx
* @brief led应用函数接口
******************************************************************************
* @attention
*
* 实验平台:野火 F103-霸道 STM32 开发板
* 论坛 :http://www.firebbs.cn
* 淘宝 :https://fire-stm32.taobao.com
*
******************************************************************************
*/
#include "./led/bsp_led.h"
/**
* @brief 初始化控制LED的IO
* @param 无
* @retval 无
*/
void LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( LED1_GPIO_CLK | LED2_GPIO_CLK | LED3_GPIO_CLK, ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED1_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED2_GPIO_PIN;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED3_GPIO_PIN;
/*调用库函数,初始化GPIOF*/
GPIO_Init(LED3_GPIO_PORT, &GPIO_InitStructure);
/* 关闭所有led灯 */
GPIO_SetBits(LED1_GPIO_PORT, LED1_GPIO_PIN);
/* 关闭所有led灯 */
GPIO_SetBits(LED2_GPIO_PORT, LED2_GPIO_PIN);
/* 关闭所有led灯 */
GPIO_SetBits(LED3_GPIO_PORT, LED3_GPIO_PIN);
}
void assert_failed(uint8_t* file, uint32_t line)
{
// 断言错误时执行的代码
LED1_ON;
}
/*********************************************END OF FILE**********************/
在bsp_usart.c中关闭串口中断
/**
* @brief USART GPIO 配置,工作参数配置
* @param 无
* @retval 无
*/
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 将中断失能
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, DISABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
在main.c中编写测试程序
int main(void)
{
uint8_t ch = 0;
USART_Config(); // 初始化USART
LED_GPIO_Config(); // 初始化LED
printf("USART-RGB\n");
printf("1:RED, 2:GREEN, 3:BLUE, 4:YELLOW, 5:PURPLE, 6:CYAN, 7:WHITE\n");
printf("Others: BLACK\n");
while(1)
{
ch = getchar();
printf("ch = %c\n", ch);
switch(ch)
{
case '1': LED_RED;
break;
case '2': LED_GREEN;
break;
case '3': LED_BLUE;
break;
case '4': LED_YELLOW;
break;
case '5': LED_PURPLE;
break;
case '6': LED_CYAN;
break;
case '7': LED_WHITE;
break;
default: LED_RGBOFF;
break;
}
}
}


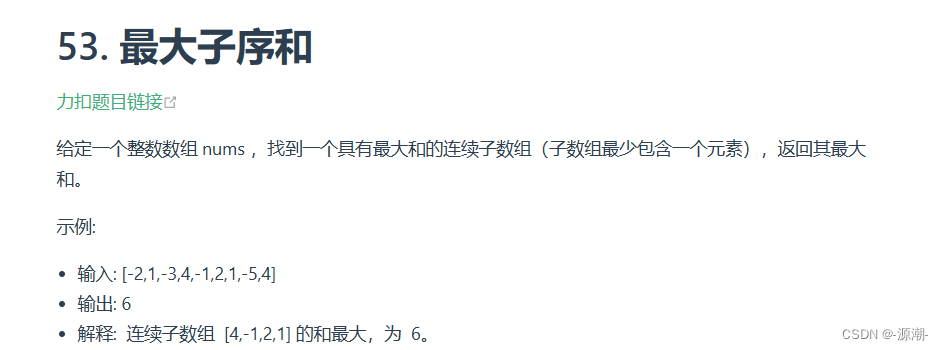

![[Python] 如何在Windows下安装图形可视化工具graphviz](https://img-blog.csdnimg.cn/direct/8007412c0794458ebf6e4886ee9f24d9.png)