_node标签:
在指定机器上启动节点
·respawn="true|false"(可选)
如果节点退出,是否自动重启
·respawndelay="N"(可选)
如果 respawn 为 true,那么延迟N秒后启动节点
·required="true|false"(可选)
该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch
。ns="xxx"(可选)
在指定命名空间 xxx 中启动节点,避免重名
·clear params="true|false"(可选)
在启动前,删除节点的私有空间的所有参数
*output="log|screen"(可选)
日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log
include标签:将另一个launch文件导入该文件
<launch>
<include file="$(file 包名)/launch/xxx.launch" />
</launch>
remap标签:改节点名
node节点下
<remap from='...' to='...' />
param标签:参数服务器使用
·name="命名空间/参数名
参数名称,可以包含命名空间
·value="xxx(可选)
定义参数值,如果此处省略,必须指定外部文件作为参数源
·type="str|int|double|bool|yaml"(可选)
指定参数类型,如果未指定,roslaunch 会尝试确定参数类型,规则如下
·如果包含'的数字解析未浮点型,否则为整型
o "true" 和 "false" 是 bool 值(不区分大小写)
·其他是字符串
rosparam标签:
<rosparam>标签可以从 YAML 文件导入参数,或将参数导出到 YAML 文件,也可以用来删除参数,<rosparam>标签在<node>标签中时被视为私有。
·command="load| dump| delete"(可选,默认 load)
加载、导出或删除参数
。 file="$(find xxxxx)/xxx/yyy...."
加载或导出到的 yaml 文件
。param="参数名称
。ns="命名空间" (可选)
group标签:同时启动两个节点(创建两个乌龟GUI)
<launch>
<group ns='first'>
...............
</group>
<group ns='second'>
...............
</group>
</launch>
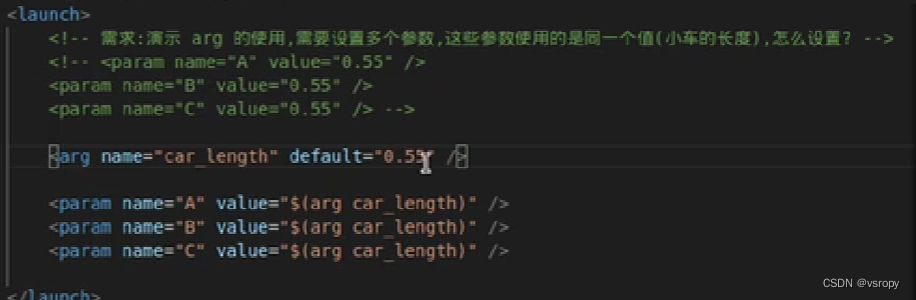
arg标签: