构建库函数雏形
- 进行外设结构体定义
- 构建置位和复位函数
- 进行库函数的自定义
- 实验实例
寄存器 ⇒ 固件库 \textbf{寄存器}\Rightarrow\textbf{固件库} 寄存器⇒固件库
进行外设结构体定义
将之前中的头文件重新定义:
/*片上外设基地址 */
#define PERIPH_BASE ((unsigned int)0x40000000)
/*总线基地址 */
#define AHB1PERIPH_BASE (PERIPH_BASE + 0x00020000)
/*GPIO外设基地址*/
#define GPIOF_BASE (AHB1PERIPH_BASE + 0x1400)
/*RCC外设基地址*/
#define RCC_BASE (AHB1PERIPH_BASE + 0x3800)
/*RCC的AHB1时钟使能寄存器地址,强制转换成指针*/
#define RCC_AHB1ENR *(unsigned int*)(RCC_BASE+0x30)
/* 外设结构体定义 */
typedef unsigned int uint32;
typedef unsigned int uint16;
typedef struct{
uint32 MODER;
uint32 OTYPER;
uint32 OSPEEDR;
uint32 PUPDR;
uint32 IDR;
uint32 ODR;
uint16 BSRRH;
uint16 BSRRL;
uint32 LCKR;
uint32 AFRL;
uint32 AFRH;
}GPIO_TYPEDEF;
#define GPIOF ((GPIO_TYPEDEF*)GPIOF_BASE) //将GPIOF定义为GPIO_TYPEDEF类型的GPIO_BASE
构建置位和复位函数
在嵌入式系统中,BSRRL 和 BSRRH 是用于设置和复位特定引脚的寄存器位。这两个寄存器通常用于直接操作微控制器上的GPIO(General Purpose Input/Output)引脚。
-
BSRRL(Bit Set Register High/Low):用于将指定的引脚置位(设置为高电平)。通过写入1到BSRRL寄存器的特定位,相应引脚将被设置为高电平。 -
BSRRH(Bit Reset Register High/Low):用于将指定的引脚复位(设置为低电平)。通过写入1到BSRRH寄存器的特定位,相应引脚将被设置为低电平。
/*
*函数功能:设置引脚为高电平
*参数说明:GPIOx,该参数为GPIO_TypeDef类型的指针,指向GPIO端口的地址
* GPIO_Pin:选择要设置的GPIO端口引脚,可输入宏GPIO_Pin_0-15,
* 表示GPIOx端口的0-15号引脚。
*/
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/*设置GPIOx端口BSRRL寄存器的第GPIO_Pin位,使其输出高电平*/
/*因为BSRR寄存器写0不影响,
GPIO_Pin只是对应位为1,其它位均为0,所以可以直接赋值*/
GPIOx->BSRRL = GPIO_Pin;
}
/*
*函数功能:设置引脚为低电平
*参数说明:GPIOx,该参数为GPIO_TypeDef类型的指针,指向GPIO端口的地址
* GPIO_Pin:选择要设置的GPIO端口引脚,可输入宏GPIO_Pin_0-15,
* 表示GPIOx端口的0-15号引脚。
*/
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/*设置GPIOx端口BSRRH寄存器的第GPIO_Pin位,使其输出低电平*/
/*因为BSRR寄存器写0不影响,
GPIO_Pin只是对应位为1,其它位均为0,所以可以直接赋值*/
GPIOx->BSRRH = GPIO_Pin;
}
进行库函数的自定义
step I: \textbf{step I:} step I: 对端口进行输出数据类型枚举
/* GPIO端口配置模式的枚举定义 */
typedef enum{
GPIO_Mode_IN = 0x00, /*!< 输入模式 */
GPIO_Mode_OUT = 0x01, /*!< 输出模式 */
GPIO_Mode_AF = 0x02, /*!< 复用模式 */
GPIO_Mode_AN = 0x03 /*!< 模拟模式 */
}GPIOMode_TypeDef;
/* GPIO输出类型枚举定义 */
typedef enum{
GPIO_OType_PP = 0x00, /*!< 推挽模式 */
GPIO_OType_OD = 0x01 /*!< 开漏模式 */
}GPIOOType_TypeDef;
/* GPIO输出速率枚举定义 */
typedef enum{
GPIO_Speed_2MHz = 0x00, /*!< 2MHz */
GPIO_Speed_25MHz = 0x01, /*!< 25MHz */
GPIO_Speed_50MHz = 0x02, /*!< 50MHz */
GPIO_Speed_100MHz = 0x03 /*!< 100MHz */
}GPIOSpeed_TypeDef;
/* GPIO上/下拉配置枚举定义 */
typedef enum{
GPIO_PuPd_NOPULL = 0x00, /*浮空*/
GPIO_PuPd_UP = 0x01, /*上拉*/
GPIO_PuPd_DOWN = 0x02 /*下拉*/
}GPIOPuPd_TypeDef;
step II: \textbf{step II:} step II:对端口进行结构化描述
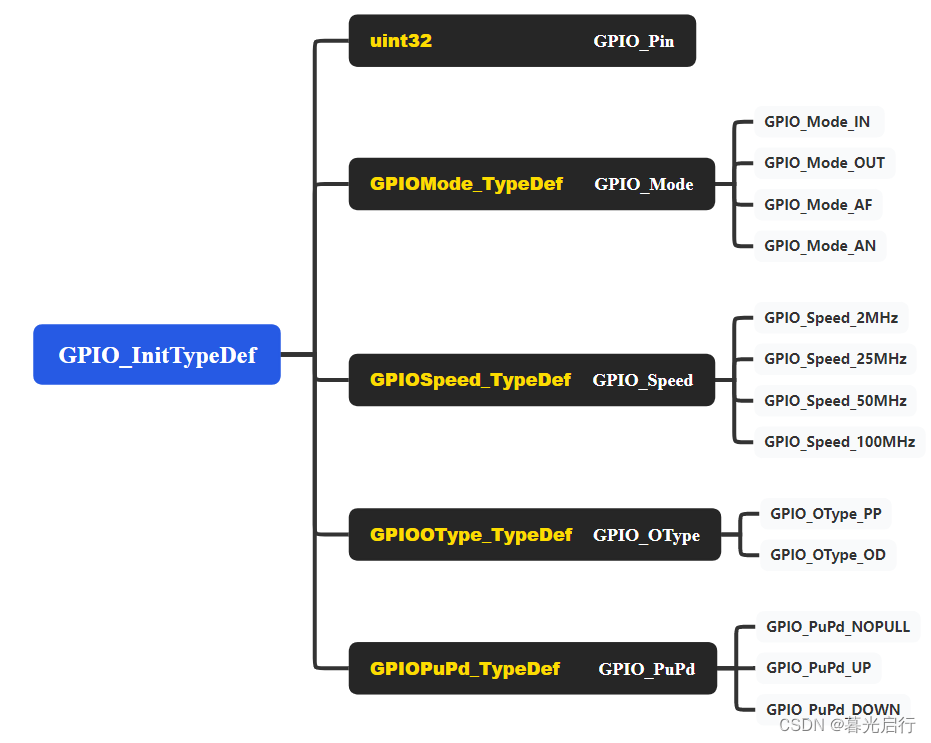
/* GPIO初始化结构体类型定义 */
typedef struct {
uint32_t GPIO_Pin; /*!< 选择要配置的GPIO引脚
可输入 GPIO_Pin_ 定义的宏 */
GPIOMode_TypeDef GPIO_Mode; /*!< 选择GPIO引脚的工作模式
可输入 GPIOMode_TypeDef 定义的枚举值*/
GPIOSpeed_TypeDef GPIO_Speed; /*!< 选择GPIO引脚的速率
可输入 GPIOSpeed_TypeDef 定义的枚举值 */
GPIOOType_TypeDef GPIO_OType; /*!< 选择GPIO引脚输出类型
可输入 GPIOOType_TypeDef 定义的枚举值*/
GPIOPuPd_TypeDef GPIO_PuPd; /*!<选择GPIO引脚的上/下拉模式
可输入 GPIOPuPd_TypeDef 定义的枚举值*/
}GPIO_InitTypeDef;
step III: \textbf{step III:} step III:例化GPIO口
实验实例
main.c部分
闪烁红灯一段时间后闪烁绿灯
#include "stm32f4xx_gpio.h"
//简单的延时函数,让cpu执行无意义指令,消耗时间
//具体延时时间难以计算,以后我们可使用定时器精确延时
void Delay( uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
int main(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/*开启 GPIOF 时钟,使用外设时都要先开启它的时钟*/
RCC->AHB1ENR |= (1<<5);
/* LED 端口初始化 */
/*初始化PF6引脚*/
/*选择要控制的GPIO引脚*/
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;
/*设置引脚模式为输出模式*/
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
/*设置引脚的输出类型为推挽输出*/
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
/*设置引脚为上拉模式*/
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;
/*设置引脚速率为2MHz */
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;
/*调用库函数,使用上面配置的GPIO_InitStructure初始化GPIO*/
GPIO_Init(GPIOF, &GPIO_InitStruct);
/*使引脚输出低电平,点亮LED1*/
GPIO_ResetBits(GPIOF,GPIO_Pin_6);
/*延时一段时间*/
Delay(0xFFFFFF);
/*使引脚输出高电平,关闭LED1*/
GPIO_SetBits(GPIOF,GPIO_Pin_6);
/*初始化PF7引脚*/
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOF,&GPIO_InitStruct);
/*使引脚输出低电平,点亮LED2*/
GPIO_ResetBits(GPIOF,GPIO_Pin_7);
}
// 函数为空,目的是为了骗过编译器不报错
void SystemInit(void){
}
stm32f4xx_gpio.h部分
#include "stm32f4xx.h"
/*GPIO引脚号定义*/
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< 选择Pin0 (1<<0) */
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< 选择Pin1 (1<<1)*/
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< 选择Pin2 (1<<2)*/
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< 选择Pin3 (1<<3)*/
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< 选择Pin4 */
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< 选择Pin5 */
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< 选择Pin6 */
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< 选择Pin7 */
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< 选择Pin8 */
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< 选择Pin9 */
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< 选择Pin10 */
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< 选择Pin11 */
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< 选择Pin12 */
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< 选择Pin13 */
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< 选择Pin14 */
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< 选择Pin15 */
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< 选择全部引脚 */
/**
* GPIO端口配置模式的枚举定义
*/
typedef enum
{
GPIO_Mode_IN = 0x00, /*!< 输入模式 */
GPIO_Mode_OUT = 0x01, /*!< 输出模式 */
GPIO_Mode_AF = 0x02, /*!< 复用模式 */
GPIO_Mode_AN = 0x03 /*!< 模拟模式 */
}GPIOMode_TypeDef;
/**
* GPIO输出类型枚举定义
*/
typedef enum
{
GPIO_OType_PP = 0x00, /*!< 推挽模式 */
GPIO_OType_OD = 0x01 /*!< 开漏模式 */
}GPIOOType_TypeDef;
/**
* GPIO输出速率枚举定义
*/
typedef enum
{
GPIO_Speed_2MHz = 0x00, /*!< 2MHz */
GPIO_Speed_25MHz = 0x01, /*!< 25MHz */
GPIO_Speed_50MHz = 0x02, /*!< 50MHz */
GPIO_Speed_100MHz = 0x03 /*!<100MHz */
}GPIOSpeed_TypeDef;
/**
*GPIO上/下拉配置枚举定义
*/
typedef enum
{
GPIO_PuPd_NOPULL = 0x00,/*浮空*/
GPIO_PuPd_UP = 0x01, /*上拉*/
GPIO_PuPd_DOWN = 0x02 /*下拉*/
}GPIOPuPd_TypeDef;
/**
* GPIO初始化结构体类型定义
*/
typedef struct
{
uint32_t GPIO_Pin; /*!< 选择要配置的GPIO引脚
可输入 GPIO_Pin_ 定义的宏 */
GPIOMode_TypeDef GPIO_Mode; /*!< 选择GPIO引脚的工作模式
可输入 GPIOMode_TypeDef 定义的枚举值*/
GPIOSpeed_TypeDef GPIO_Speed; /*!< 选择GPIO引脚的速率
可输入 GPIOSpeed_TypeDef 定义的枚举值 */
GPIOOType_TypeDef GPIO_OType; /*!< 选择GPIO引脚输出类型
可输入 GPIOOType_TypeDef 定义的枚举值*/
GPIOPuPd_TypeDef GPIO_PuPd; /*!<选择GPIO引脚的上/下拉模式
可输入 GPIOPuPd_TypeDef 定义的枚举值*/
}GPIO_InitTypeDef;
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
stm32f4xx_gpio.c部分
#include "stm32f4xx_gpio.h"
/**
*函数功能:设置引脚为高电平
*参数说明:GPIOx,该参数为GPIO_TypeDef类型的指针,指向GPIO端口的地址
* GPIO_Pin:选择要设置的GPIO端口引脚,可输入宏GPIO_Pin_0-15,
* 表示GPIOx端口的0-15号引脚。
*/
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/*设置GPIOx端口BSRRL寄存器的第GPIO_Pin位,使其输出高电平*/
/*因为BSRR寄存器写0不影响,
GPIO_Pin只是对应位为1,其它位均为0,所以可以直接赋值*/
GPIOx->BSRRL = GPIO_Pin;
}
/**
*函数功能:设置引脚为低电平
*参数说明:GPIOx,该参数为GPIO_TypeDef类型的指针,指向GPIO端口的地址
* GPIO_Pin:选择要设置的GPIO端口引脚,可输入宏GPIO_Pin_0-15,
* 表示GPIOx端口的0-15号引脚。
*/
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/*设置GPIOx端口BSRRH寄存器的第GPIO_Pin位,使其输出低电平*/
/*因为BSRR寄存器写0不影响,
GPIO_Pin只是对应位为1,其它位均为0,所以可以直接赋值*/
GPIOx->BSRRH = GPIO_Pin;
}
/**
*函数功能:初始化引脚模式
*参数说明:GPIOx,该参数为GPIO_TypeDef类型的指针,指向GPIO端口的地址
* GPIO_InitTypeDef:GPIO_InitTypeDef结构体指针,指向初始化变量
*/
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t pinpos = 0x00, pos = 0x00 , currentpin = 0x00;
/*-- GPIO Mode Configuration --*/
for (pinpos = 0x00; pinpos < 16; pinpos++)
{
/*以下运算是为了通过 GPIO_InitStruct->GPIO_Pin 算出引脚号0-15*/
/*经过运算后pos的pinpos位为1,其余为0,与GPIO_Pin_x宏对应。pinpos变量每次循环加1,*/
pos = ((uint32_t)0x01) << pinpos;
/* pos与GPIO_InitStruct->GPIO_Pin做 & 运算,若运算结果currentpin == pos,
则表示GPIO_InitStruct->GPIO_Pin的pinpos位也为1,
从而可知pinpos就是GPIO_InitStruct->GPIO_Pin对应的引脚号:0-15*/
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;
/*currentpin == pos时执行初始化*/
if (currentpin == pos)
{
/*GPIOx端口,MODER寄存器的GPIO_InitStruct->GPIO_Pin对应的引脚,MODER位清空*/
GPIOx->MODER &= ~(3 << (2 *pinpos));
/*GPIOx端口,MODER寄存器的GPIO_Pin引脚,MODER位设置"输入/输出/复用输出/模拟"模式*/
GPIOx->MODER |= (((uint32_t)GPIO_InitStruct->GPIO_Mode) << (2 *pinpos));
/*GPIOx端口,PUPDR寄存器的GPIO_Pin引脚,PUPDR位清空*/
GPIOx->PUPDR &= ~(3 << ((2 *pinpos)));
/*GPIOx端口,PUPDR寄存器的GPIO_Pin引脚,PUPDR位设置"上/下拉"模式*/
GPIOx->PUPDR |= (((uint32_t)GPIO_InitStruct->GPIO_PuPd) << (2 *pinpos));
/*若模式为"输出/复用输出"模式,则设置速度与输出类型*/
if ((GPIO_InitStruct->GPIO_Mode == GPIO_Mode_OUT) || (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_AF))
{
/*GPIOx端口,OSPEEDR寄存器的GPIO_Pin引脚,OSPEEDR位清空*/
GPIOx->OSPEEDR &= ~(3 << (2 *pinpos));
/*GPIOx端口,OSPEEDR寄存器的GPIO_Pin引脚,OSPEEDR位设置输出速度*/
GPIOx->OSPEEDR |= ((uint32_t)(GPIO_InitStruct->GPIO_Speed) << (2 *pinpos));
/*GPIOx端口,OTYPER寄存器的GPIO_Pin引脚,OTYPER位清空*/
GPIOx->OTYPER &= ~(1 << (pinpos)) ;
/*GPIOx端口,OTYPER位寄存器的GPIO_Pin引脚,OTYPER位设置"推挽/开漏"输出类型*/
GPIOx->OTYPER |= (uint16_t)(((uint16_t)GPIO_InitStruct->GPIO_OType) << (pinpos));
}
}
}
}