策略梯度算法的缺点
这里策略梯度算法特指蒙特卡洛策略梯度算法,即 REINFORCE 算法。 相比于 DQN 之类的基于价值的算法,策略梯度算法有以下优点。
- 适配连续动作空间。在将策略函数设计的时候我们已经展开过,这里不再赘述。
- 适配随机策略。由于策略梯度算法是基于策略函数的,因此可以适配随机策略,而基于价值的算法则需要一个确定的策略。此外其计算出来的策略梯度是无偏的,而基于价值的算法则是有偏的。
但同样的,策略梯度算法也有其缺点。
- 采样效率低。由于使用的是蒙特卡洛估计,与基于价值算法的时序差分估计相比其采样速度必然是要慢很多的,这个问题在前面相关章节中也提到过。
- 高方差。虽然跟基于价值的算法一样都会导致高方差,但是策略梯度算法通常是在估计梯度时蒙特卡洛采样引起的高方差,这样的方差甚至比基于价值的算法还要高。
- 收敛性差。容易陷入局部最优,策略梯度方法并不保证全局最优解,因为它们可能会陷入局部最优点。策略空间可能非常复杂,存在多个局部最优点,因此算法可能会在局部最优点附近停滞。
- 难以处理高维离散动作空间:对于离散动作空间,采样的效率可能会受到限制,因为对每个动作的采样都需要计算一次策略。当动作空间非常大时,这可能会导致计算成本的急剧增加。
结合了策略梯度和值函数的 Actor-Critic 算法则能同时兼顾两者的优点,并且甚至能缓解两种方法都很难解决的高方差问题。
Q:为什么各自都有高方差的问题,结合了之后反而缓解了这个问题呢?
A:策略梯度算法是因为直接对策略参数化,相当于既要利用策略去与环境交互采样,又要利用采样去估计策略梯度,而基于价值的算法也是需要与环境交互采样来估计值函数的,因此也会有高方差的问题。
而结合之后呢,Actor 部分还是负责估计策略梯度和采样,但 Critic 即原来的值函数部分就不需要采样而只负责估计值函数了,并且由于它估计的值函数指的是策略函数的值,相当于带来了一个更稳定的估计,来指导 Actor 的更新,反而能够缓解策略梯度估计带来的方差。
Q Actor-Critic算法

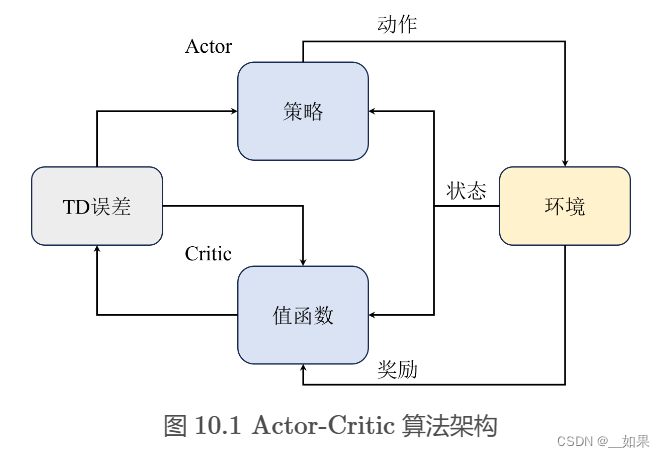
如图 10.1 所示,我们通常将 Actor 和 Critic 分别用两个模块来表示,即图中的策略函数( Policy )和价值函数( Value Function )。Actor与环境交互采样,然后将采样的轨迹输入 Critic 网络,Critic 网络估计出当前状态-动作对的价值,然后再将这个价值作为 Actor 网络的梯度更新的依据,这也是所有 Actor-Critic 算法的基本通用架构
A2C与A3C算法
A2C


A3C

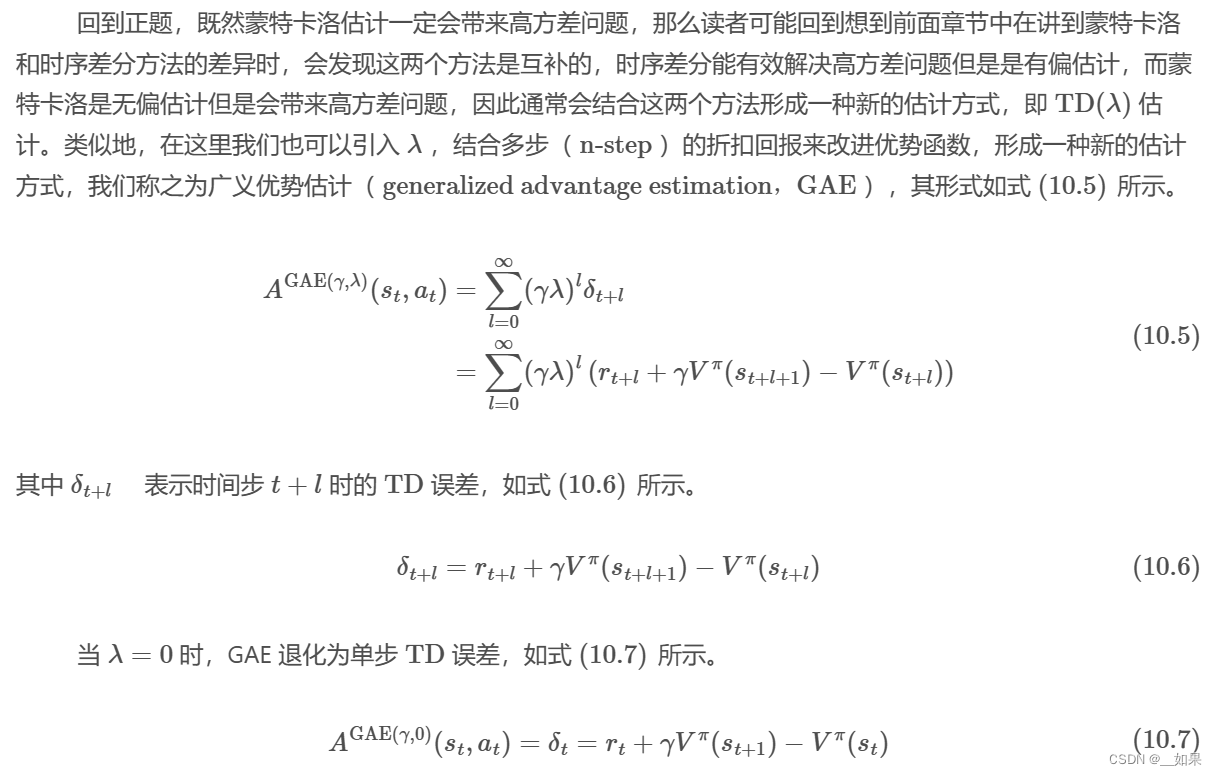
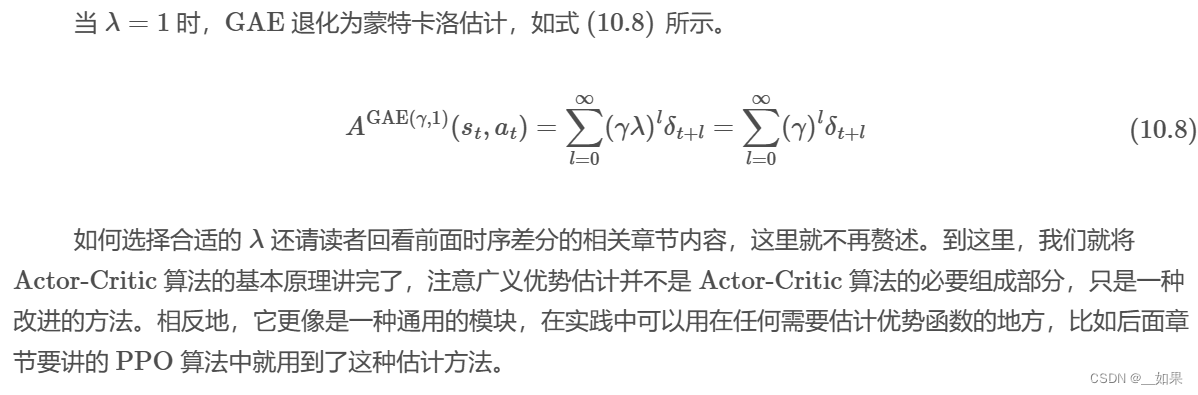
广义优势估计
由于优势函数通本质上来说还是使用蒙特卡洛估计,因此尽管减去了基线,有时候还是会产生高方差,从而导致训练过程不稳定
实战:A2C算法
定义模型
Critic 的输入是状态,输出则是一个维度的价值,而 Actor 输入的也会状态,但输出的是概率分布
class Critic(nn.Module):
def __init__(self,state_dim):
self.fc1 = nn.Linear(state_dim, 256)
self.fc2 = nn.Linear(256, 256)
self.fc3 = nn.Linear(256, 1)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
value = self.fc3(x)
return value
class Actor(nn.Module):
def __init__(self, state_dim, action_dim):
self.fc1 = nn.Linear(state_dim, 256)
self.fc2 = nn.Linear(256, 256)
self.fc3 = nn.Linear(256, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
logits_p = F.softmax(self.fc3(x), dim=1)
return logits_p这里由于是离散的动作空间,根据在策略梯度章节中设计的策略函数,我们使用了 softmax 函数来输出概率分布。另外,实践上来看,由于 Actor 和 Critic 的输入是一样的,因此我们可以将两个网络合并成一个网络,以便于加速训练。这有点类似于 Duelling DQN 算法中的做法
class ActorCritic(nn.Module):
def __init__(self, state_dim, action_dim):
self.fc1 = nn.Linear(state_dim, 256)
self.fc2 = nn.Linear(256, 256)
self.action_layer = nn.Linear(256, action_dim)
self.value_layer = nn.Linear(256, 1)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
logits_p = F.softmax(self.action_layer(x), dim=1)
value = self.value_layer(x)
return logits_p, value动作采样
与 DQN 算法不同等确定性策略不同,A2C 的动作输出不再是 Q 值最大对应的动作,而是从概率分布中采样动作,这意味着即使是很小的概率,也有可能被采样到,这样就能保证探索性
# Categorical分布函数,能直接从概率分布中采样动作
from torch.distributions import Categorical
class Agent:
def __init__(self):
self.model = ActorCritic(state_dim, action_dim)
def sample_action(self,state):
'''动作采样函数
'''
state = torch.tensor(state, device=self.device, dtype=torch.float32)
logits_p, value = self.model(state)
dist = Categorical(logits_p)
action = dist.sample()
return action策略更新
我们首先需要计算出优势函数,一般先计算出回报,然后减去网络输出的值即可
class Agent:
# 定义一个Agent类
def _compute_returns(self, rewards, dones):
# 计算回报
returns = [] # 初始化一个回报列表
discounted_sum = 0 # 初始化折扣累计和
# 从后向前遍历奖励和是否结束的序列
for reward, done in zip(reversed(rewards), reversed(dones)):
# 如果游戏结束,则折扣累计和重置为0
if done:
discounted_sum = 0
# 否则,将奖励加上折现因子gamma乘以之前的折扣累计和
discounted_sum = reward + (self.gamma * discounted_sum)
# 将计算出的折扣累计和添加到回报列表的开头
returns.insert(0, discounted_sum)
# 将回报列表转换为PyTorch张量,并移到Agent指定的设备上
returns = torch.tensor(returns, device=self.device, dtype=torch.float32).unsqueeze(dim=1)
# 对回报进行归一化处理
returns = (returns - returns.mean()) / (returns.std() + 1e-5) # 添加一个很小的数以避免除以零
return returns
def compute_advantage(self):
'''计算优势函数
'''
# 从记忆库中随机抽取一批经验
logits_p, states, rewards, dones = self.memory.sample()
# 计算回报
returns = self._compute_returns(rewards, dones)
# 将状态转换为PyTorch张量,并移到Agent指定的设备上
states = torch.tensor(states, device=self.device, dtype=torch.float32)
# 前向传播模型以获得动作的概率和对数概率
logits_p, values = self.model(states)
# 计算优势,即回报与批评价值的差
advantages = returns - values
return advantages
这里我们使用了一个技巧,即将回报归一化,这样可以让优势函数的值域在 [−1,1] 之间,这样可以让优势函数更稳定,从而减少方差。计算优势之后就可以分别计算 Actor 和 Critic 的损失函数了
class Agent:
def compute_loss(self):
'''计算损失函数
'''
logits_p, states, rewards, dones = self.memory.sample()
returns = self._compute_returns(rewards, dones)
states = torch.tensor(states, device=self.device, dtype=torch.float32)
logits_p, values = self.model(states)
advantages = returns - values
dist = Categorical(logits_p)
log_probs = dist.log_prob(actions)
# 注意这里策略损失反向传播时不需要优化优势函数,因此需要将其 detach 掉
actor_loss = -(log_probs * advantages.detach()).mean()
critic_loss = advantages.pow(2).mean()
return actor_loss, critic_loss练习题
1.相比于 REINFORCE 算法, A2C 主要的改进点在哪里,为什么能提高速度?
(1)结合了策略梯度和值函数的 Actor-Critic 算法则能同时兼顾两者的优点,并且甚至能缓解两种方法都很难解决的高方差问题
(2)A2C计算了一个优势函数来衡量实际回报与批评价值之间的差异
(3)A2C在计算回报时使用了均值标准化,这有助于加快学习的收敛速度
2.A2C 算法是 on-policy 的吗?为什么?
是的。A2C算法通过Actor-Critic实现on-policy学习。Actor负责生成行动的概率分布,而Critic负责评估状态的价值。在A2C的更新过程中,智能体根据Actor生成的策略选择行动,并使用这些行动的结果来更新Actor和Critic。因此,A2C在执行和学习时使用的是同一策略