简介
附上SHT30资料和逻辑分析仪源文件,点击下载
关于IIC的介绍网上已经非常详尽,这里只说重点:
- 双线(SDA,SCL),半双工
- 采用主从结构,支持一主多从,通过地址寻址,每个I2C设备都有唯一的7位或10位地址,还有1bit选择读写(0为写,1为读)
- 速率较低,I2C总线支持多种通信速率,通常有标准模式(100 kbit/s)、快速模式(400 kbit/s)、高速模式(3.4 Mbit/s)和超高速模式(5 Mbit/s)等
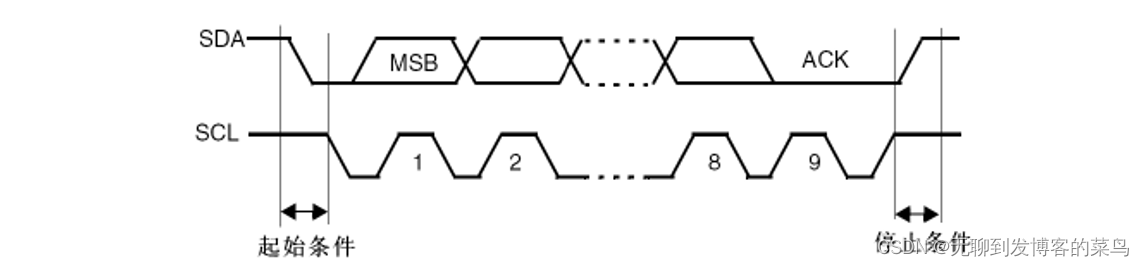
时序图
IIC的 SCL 和SDA 都需要接上拉电阻,以保证空闲状态的稳定性
- 在SCL低电平的时候SDA可变,SCL高电平的时候进行采样
- 8bit传输完后接收方需要回一个ACK,低电平表示ACK,高电平表示NACK
- 停止条件和ACK可以没有,起始条件必须有
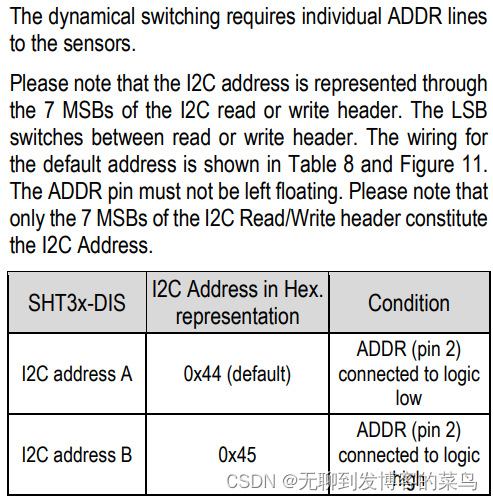
SHT30资料
SHT30的7位地址为0x44
读取时序图
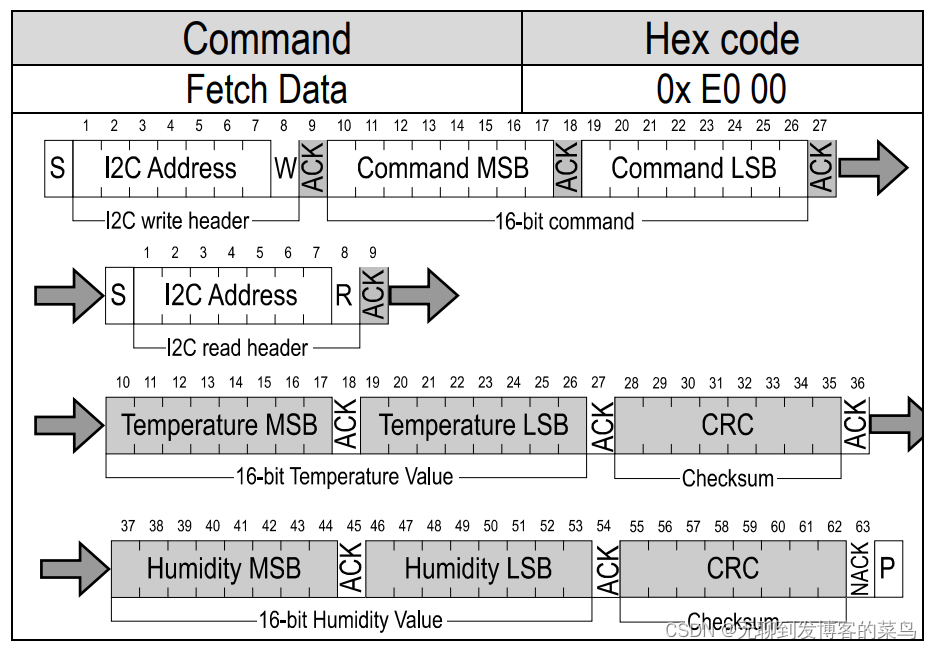
CRC-8校验规则
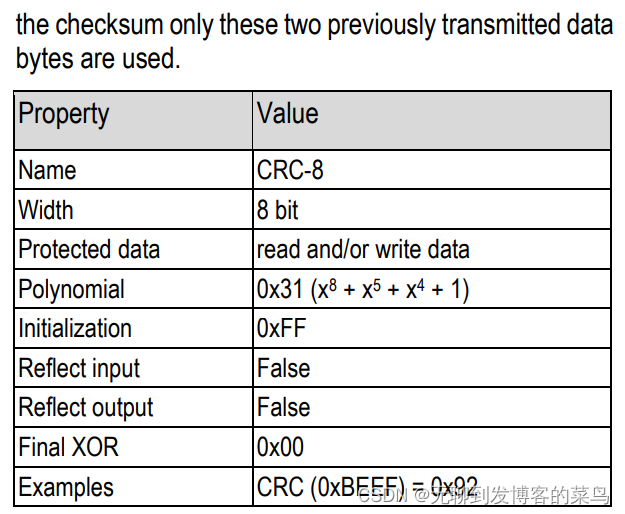
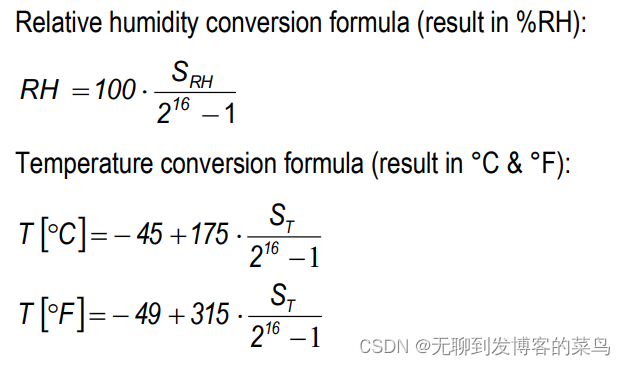
计算结果
读取代码
void SHT30_read_result(float *temp, uint8_t *humi)
{
uint8_t buff[6];
uint16_t data;
float temp_float, humi_float;
iic_start();
iic_send_byte(SHT30_ADDR << 1 | 0); // 写7位I2C设备地址加0作为写取位,1为读取位
iic_wait_ack();
iic_send_byte(0xE0);
iic_wait_ack();
iic_send_byte(0x00);
iic_wait_ack();
iic_start();
iic_send_byte(SHT30_ADDR << 1 | 1); // 写7位I2C设备地址加0作为写取位,1为读取位
iic_wait_ack();
buff[0] = iic_read_byte(1);
buff[1] = iic_read_byte(1);
buff[2] = iic_read_byte(1);
buff[3] = iic_read_byte(1);
buff[4] = iic_read_byte(1);
buff[5] = iic_read_byte(0);
iic_stop();
// 计算温度
if (CRC_8(buff, 2) == buff[2]) // 进行CRC-8校验
{
data = buff[0] * 256 + buff[1]; // 取出16位的温度值
temp_float = ((float)data) * 0.267032f - 4500; // 根据手册公式计算,为了精度,计算数值先*100
temp_float = temp_float * 0.01f; // 再除以100,得到正常温度值
*temp = temp_float;
}
// 计算湿度
if (CRC_8(&buff[3], 2) == buff[5]) // 进行CRC-8校验
{
data = buff[3] * 256 + buff[4]; // 取出16位的湿度值
humi_float = ((float)data) * 0.152590f; // 根据手册公式计算
humi_float = (uint8_t)(humi_float * 0.01f); // 除以100,得到正常湿度值
*humi = (uint8_t)humi_float;
}
// printf("%.1f %d\r\n", temp_float, (uint8_t)humi_float);
}
static uint8_t CRC_8(uint8_t *Crc_ptr, uint8_t LEN)
{
uint8_t CRC_Value = 0xFF;
uint8_t i = 0, j = 0;
for (i = 0; i < LEN; i++)
{
CRC_Value ^= *(Crc_ptr + i);
for (j = 0; j < 8; j++)
{
if (CRC_Value & 0x80)
CRC_Value = (CRC_Value << 1) ^ 0x31;
else
CRC_Value = (CRC_Value << 1);
}
}
return CRC_Value;
}
逻辑分析仪


模拟IIC源码
myiic.c
#include "myiic.h"
void iic_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
IIC_SCL_GPIO_CLK_ENABLE(); /* SCL引脚时钟使能 */
IIC_SDA_GPIO_CLK_ENABLE(); /* SDA引脚时钟使能 */
gpio_init_struct.Pin = IIC_SCL_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 快速 */
HAL_GPIO_Init(IIC_SCL_GPIO_PORT, &gpio_init_struct); /* SCL */
gpio_init_struct.Pin = IIC_SDA_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_OD; /* 推挽输出 */
HAL_GPIO_Init(IIC_SDA_GPIO_PORT, &gpio_init_struct); /* SDA */
/* SDA引脚模式设置,开漏输出,上拉, 这样就不用再设置IO方向了, 开漏输出的时候(=1), 也可以读取外部信号的高低电平 */
iic_stop(); /* 停止总线上所有设备 */
}
// 延时2us
static void iic_delay(void)
{
uint32_t timer;
timer = get_tim2_cnt();
while (get_tim2_cnt() - timer < 20)
;
}
/**
* @brief 产生IIC起始信号
* @param 无
* @retval 无
*/
void iic_start(void)
{
IIC_SDA(1);
IIC_SCL(1);
iic_delay();
IIC_SDA(0); /* START信号: 当SCL为高时, SDA从高变成低, 表示起始信号 */
iic_delay();
IIC_SCL(0); /* 钳住I2C总线,准备发送或接收数据 */
iic_delay();
}
/**
* @brief 产生IIC停止信号
* @param 无
* @retval 无
*/
void iic_stop(void)
{
IIC_SDA(0); /* STOP信号: 当SCL为高时, SDA从低变成高, 表示停止信号 */
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SDA(1); /* 发送I2C总线结束信号 */
iic_delay();
}
/**
* @brief 等待应答信号到来
* @param 无
* @retval 1,接收应答失败
* 0,接收应答成功
*/
uint8_t iic_wait_ack(void)
{
uint8_t waittime = 0;
uint8_t rack = 0;
IIC_SDA(1); /* 主机释放SDA线(此时外部器件可以拉低SDA线) */
iic_delay();
IIC_SCL(1); /* SCL=1, 此时从机可以返回ACK */
iic_delay();
while (IIC_READ_SDA) /* 等待应答 */
{
waittime++;
if (waittime > 250)
{
iic_stop();
rack = 1;
break;
}
}
IIC_SCL(0); /* SCL=0, 结束ACK检查 */
iic_delay();
return rack;
}
/**
* @brief 产生ACK应答
* @param 无
* @retval 无
*/
void iic_ack(void)
{
IIC_SDA(0); /* SCL 0 -> 1 时 SDA = 0,表示应答 */
iic_delay();
IIC_SCL(1); /* 产生一个时钟 */
iic_delay();
IIC_SCL(0);
iic_delay();
IIC_SDA(1); /* 主机释放SDA线 */
iic_delay();
}
/**
* @brief 不产生ACK应答
* @param 无
* @retval 无
*/
void iic_nack(void)
{
IIC_SDA(1); /* SCL 0 -> 1 时 SDA = 1,表示不应答 */
iic_delay();
IIC_SCL(1); /* 产生一个时钟 */
iic_delay();
IIC_SCL(0);
iic_delay();
}
/**
* @brief IIC发送一个字节
* @param data: 要发送的数据
* @retval 无
*/
void iic_send_byte(uint8_t data)
{
uint8_t t;
for (t = 0; t < 8; t++)
{
IIC_SDA((data & 0x80) >> 7); /* 高位先发送 */
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SCL(0);
data <<= 1; /* 左移1位,用于下一次发送 */
}
IIC_SDA(1); /* 发送完成, 主机释放SDA线 */
}
/**
* @brief IIC读取一个字节
* @param ack: ack=1时,发送ack; ack=0时,发送nack
* @retval 接收到的数据
*/
uint8_t iic_read_byte(uint8_t ack)
{
uint8_t i, receive = 0;
for (i = 0; i < 8; i++) /* 接收1个字节数据 */
{
receive <<= 1; /* 高位先输出,所以先收到的数据位要左移 */
IIC_SCL(1);
iic_delay();
if (IIC_READ_SDA)
{
receive++;
}
IIC_SCL(0);
iic_delay();
}
if (!ack)
{
iic_nack(); /* 发送nACK */
}
else
{
iic_ack(); /* 发送ACK */
}
return receive;
}
myiic.h
#ifndef __MYIIC_H
#define __MYIIC_H
#include "main.h"
#define IIC_SCL_GPIO_PORT GPIOE
#define IIC_SCL_GPIO_PIN GPIO_PIN_8
#define IIC_SCL_GPIO_CLK_ENABLE() \
do \
{ \
__HAL_RCC_GPIOE_CLK_ENABLE(); \
} while (0)
#define IIC_SDA_GPIO_PORT GPIOE
#define IIC_SDA_GPIO_PIN GPIO_PIN_7
#define IIC_SDA_GPIO_CLK_ENABLE() \
do \
{ \
__HAL_RCC_GPIOE_CLK_ENABLE(); \
} while (0)
/******************************************************************************************/
/* IO操作 */
#define IIC_SCL(x) \
do \
{ \
x ? HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_SET) \
: HAL_GPIO_WritePin(IIC_SCL_GPIO_PORT, IIC_SCL_GPIO_PIN, GPIO_PIN_RESET); \
} while (0) /* SCL */
#define IIC_SDA(x) \
do \
{ \
x ? HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_SET) \
: HAL_GPIO_WritePin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN, GPIO_PIN_RESET); \
} while (0) /* SDA */
#define IIC_READ_SDA HAL_GPIO_ReadPin(IIC_SDA_GPIO_PORT, IIC_SDA_GPIO_PIN) /* 读取SDA */
/* IIC所有操作函数 */
void iic_init(void); /* 初始化IIC的IO口 */
void iic_start(void); /* 发送IIC开始信号 */
void iic_stop(void); /* 发送IIC停止信号 */
void iic_ack(void); /* IIC发送ACK信号 */
void iic_nack(void); /* IIC不发送ACK信号 */
uint8_t iic_wait_ack(void); /* IIC等待ACK信号 */
void iic_send_byte(uint8_t txd); /* IIC发送一个字节 */
uint8_t iic_read_byte(unsigned char ack); /* IIC读取一个字节 */
#endif



![[C#]winform部署官方yolov8-obb旋转框检测的onnx模型](https://img-blog.csdnimg.cn/direct/ced49909c78847f2982c9a8d4ecb9aa8.jpeg)