概述
功能简介
LCD(Liquid Crystal Display)驱动编程,通过对显示器上电、初始化显示器驱动IC(Integrated Circuit)内部寄存器等操作,使其可以正常工作。
基于HDF(Hardware Driver Foundation)驱动框架构建的Display驱动模型作用如下:
-
为LCD器件驱动开发提供了基础驱动框架,提升驱动开发效率。
-
便于开发的器件驱动实现跨OS、跨芯片平台迁移。
基于HDF驱动框架的Display驱动模型如下所示:
图1 基于HDF驱动框架的Display驱动模型
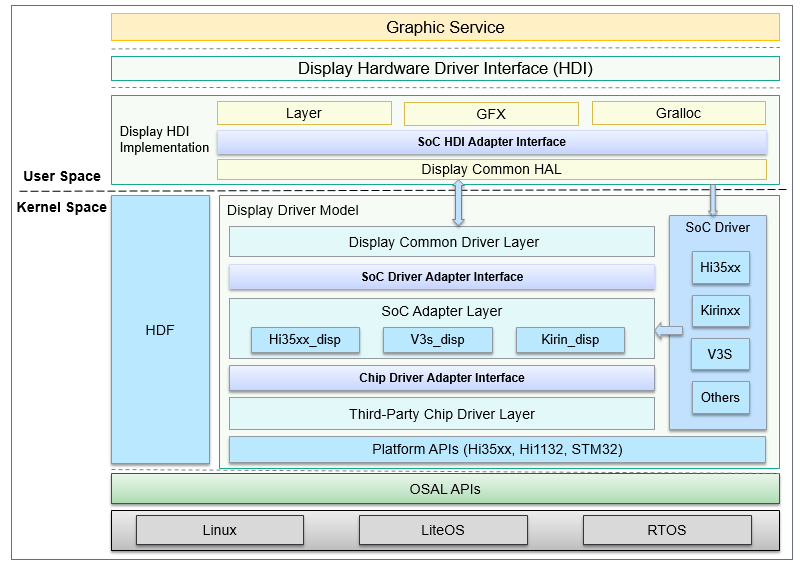
Display驱动模型主要由平台驱动层、芯片平台适配层、LCD器件驱动层三部分组成。驱动模型基于HDF驱动框架开发,通过Platform层和OSAL层提供的接口,屏蔽内核形态的差异,使得器件驱动可以便利的迁移到不同OS及芯片平台。模型向上对接Display公共HAL层,支撑HDI(Hardware Device Interface)接口的实现,通过Display-HDI对图形服务提供各类驱动能力接口。
-
Display平台驱动层:通过HDF提供的IOService数据通道,与公共HAL层对接,集中接收并处理各类上层调用指令。
-
SoC平台驱动适配层:借助此SoC适配层,实现Display驱动和SoC侧驱动解耦,主要完成芯片平台相关的参数配置,并传递平台驱动层的调用到器件驱动层。
-
LCD器件驱动层:在器件驱动层中,主要实现和器件自身强相关的驱动适配接口,例如发送初始化序列、上下电、背光设置等。
基于Display驱动模型开发LCD驱动,可以借助平台提供的各种能力及接口,较大程度的降低器件驱动的开发周期和难度,提升开发效率。
基本概念
LCD接口通常可分为MIPI DSI接口、TTL接口和LVDS接口,常用的是MIPI DSI接口和TTL接口,下面对常用的MIPI DSI接口和TTL接口作简要介绍。
-
MIPI DSI接口
-
图2 MIPI DSI接口

添加图片注释,不超过 140 字(可选)
-
MIPI DSI接口是MIPI(Mobile Industry Processor Interface)联盟定义的显示接口,主要用于移动终端显示屏接口,接口数据传输遵循MIPI协议,MIPI DSI接口为数据接口,传输图像数据,通常情况下MIPI DSI接口的控制信息以MIPI包形式通过MIPI DSI接口发送到对端IC,不需要额外的外设接口。
-
TTL接口
-
图3 TTL接口

添加图片注释,不超过 140 字(可选)
-
TTL(Transistor Transistor Logic)即晶体管-晶体管逻辑,TTL电平信号由TTL器件产生,TTL器件是数字集成电路的一大门类,它采用双极型工艺制造,具有高速度、低功耗和品种多等特点。
-
TTL接口是并行方式传输数据的接口,有数据信号、时钟信号和控制信号(行同步、帧同步、数据有效信号等),在控制信号控制下完成数据传输。通常TTL接口的LCD,内部寄存器读写需要额外的外设接口,比如SPI接口、I2C接口等。
约束与限制
开发者在进行LCD驱动编程过程中,除了要关注IC的型号,还要关注LCD外围电路设计、基带芯片的LCD接口单元、背光IC的控制等多个方面,同时包括软件的上层程序。这些都是影响开发者在调试LCD驱动的影响因素。
开发指导
场景介绍
LCD驱动模型属于驱动基础适配模块,第三方需要适配OpenHarmony系统时,需要进行LCD驱动适配。LCD驱动适配基于HDF驱动框架、Platform接口及OSAL接口开发,可以做到不区分OS(LiteOS、Linux)和芯片平台(Hi35xx、Hi38xx、V3S等),为LCD器件提供统一的驱动模型。
接口说明
为了能够调整液晶显示屏的各项参数,与display建立显示通道,实现显示器的显示效果,LCD驱动需要通过display :: host注册PanelInfo结构体、接口信息,添加描述设备;LcdResetOn读取的pin脚信息,由SampleEntryInit初始化入口函数,并注册器件驱动接口,供平台驱动调用。
表1 LCD驱动适配所需接口

添加图片注释,不超过 140 字(可选)
开发步骤
-
添加LCD驱动相关的设备描述配置。
-
在SoC平台驱动适配层中适配对应的芯片平台驱动。
-
添加器件驱动,并在驱动入口函数Init中注册Panel驱动数据,驱动数据接口主要实现下述特性:
-
LCD上下电
-
根据LCD硬件连接,使用Platform接口层提供的GPIO操作接口操作对应LCD管脚,例如复位管脚、IOVCC管脚,上电时序参考LCD供应商提供的SPEC。
-
发送初始化序列
-
根据LCD硬件接口,使用Platform接口层提供的I2C、SPI、MIPI等接口,下载LCD初始化序列,初始化参数序列可以参考LCD供应商提供的SPEC。
-
(可选)根据需求实现HDF框架其他接口。
-
(可选)根据需求使用HDF框架可创建其他设备节点,用于业务逻辑或者调试功能。
开发实例
以Hi35xx系列芯片为例,根据开发步骤所述,介绍LCD驱动的详细适配过程。
-
添加设备描述配置(vendor/bearpi/bearpi_hm_micro/hdf_config/device_info/device_info.hcs)
/* Display驱动相关的设备描述配置 */ display :: host { hostName = "display_host"; /* Display平台驱动设备描述 */ device_hdf_disp :: device { device0 :: deviceNode { policy = 2; priority = 200; permission = 0660; moduleName = "HDF_DISP"; serviceName = "hdf_disp"; } } /* SoC适配层驱动设备描述 */ device_hi35xx_disp :: device { device0 :: deviceNode { policy = 0; priority = 199; moduleName = "HI351XX_DISP"; } } /* LCD器件驱动设备描述 */ device_lcd :: device { device0 :: deviceNode { policy = 0; priority = 100; preload = 0; moduleName = "LCD_Sample"; } device1 :: deviceNode { policy = 0; priority = 100; preload = 2; moduleName = "LCD_SampleXX"; } } }2.SoC平台驱动适配层中适配对应的芯片平台驱动(drivers/hdf_core/framework/model/display/driver/adapter_soc/hi35xx_disp.c)
/* Display驱动适配MIPI等和芯片平台相关的配置 */ static int32_t MipiDsiInit(struct PanelInfo *info) { int32_t ret; struct DevHandle *mipiHandle = NULL; struct MipiCfg cfg; mipiHandle = MipiDsiOpen(0); if (mipiHandle == NULL) { HDF_LOGE("%s: MipiDsiOpen failure", __func__); return HDF_FAILURE; } cfg.lane = info->mipi.lane; cfg.mode = info->mipi.mode; cfg.format = info->mipi.format; cfg.burstMode = info->mipi.burstMode; cfg.timing.xPixels = info->width; cfg.timing.hsaPixels = info->hsw; cfg.timing.hbpPixels = info->hbp; cfg.timing.hlinePixels = info->width + info->hbp + info->hfp + info->hsw; cfg.timing.vsaLines = info->vsw; cfg.timing.vbpLines = info->vbp; cfg.timing.vfpLines = info->vfp; cfg.timing.ylines = info->height; /* 0 : no care */ cfg.timing.edpiCmdSize = 0; cfg.pixelClk = CalcPixelClk(info); cfg.phyDataRate = CalcDataRate(info); /* config mipi device */ ret = MipiDsiSetCfg(mipiHandle, &cfg); if (ret != HDF_SUCCESS) { HDF_LOGE("%s:MipiDsiSetCfg failure", __func__); } MipiDsiClose(mipiHandle); HDF_LOGI("%s:pixelClk = %d, phyDataRate = %d\n", __func__, cfg.pixelClk, cfg.phyDataRate); return ret; }3.添加器件
- 驱动定义相关接口信息(drivers/hdf_core/framework/model/display/driver/panel/mipi_icn9700.c)
#define RESET_GPIO 5 #define MIPI_DSI0 0 #define BLK_PWM1 1 #define PWM_MAX_PERIOD 100000 /* backlight setting */ #define MIN_LEVEL 0 #define MAX_LEVEL 255 #define DEFAULT_LEVEL 100 #define WIDTH 480 #define HEIGHT 960 #define HORIZONTAL_BACK_PORCH 20 #define HORIZONTAL_FRONT_PORCH 20 #define HORIZONTAL_SYNC_WIDTH 10 #define VERTICAL_BACK_PORCH 14 #define VERTICAL_FRONT_PORCH 16 #define VERTICAL_SYNC_WIDTH 2 #define FRAME_RATE 60定义PanelInfo结构体(drivers/hdf_core/framework/model/display/driver/hdf_disp.h)
struct PanelInfo { uint32_t width; uint32_t height; uint32_t hbp; uint32_t hfp; uint32_t hsw; uint32_t vbp; uint32_t vfp; uint32_t vsw; uint32_t frameRate; enum LcdIntfType intfType; enum IntfSync intfSync; struct MipiDsiDesc mipi; struct BlkDesc blk; struct PwmCfg pwm; };初始化LCD屏(drivers/hdf_core/framework/model/display/driver/panel/mipi_icn9700.c)
static uint8_t g_payLoad0[] = { 0xF0, 0x5A, 0x5A }; static uint8_t g_payLoad1[] = { 0xF1, 0xA5, 0xA5 }; static uint8_t g_payLoad2[] = { 0xB3, 0x03, 0x03, 0x03, 0x07, 0x05, 0x0D, 0x0F, 0x11, 0x13, 0x09, 0x0B }; static uint8_t g_payLoad3[] = { 0xB4, 0x03, 0x03, 0x03, 0x06, 0x04, 0x0C, 0x0E, 0x10, 0x12, 0x08, 0x0A }; static uint8_t g_payLoad4[] = { 0xB0, 0x54, 0x32, 0x23, 0x45, 0x44, 0x44, 0x44, 0x44, 0x60, 0x00, 0x60, 0x1C }; static uint8_t g_payLoad5[] = { 0xB1, 0x32, 0x84, 0x02, 0x87, 0x12, 0x00, 0x50, 0x1C }; static uint8_t g_payLoad6[] = { 0xB2, 0x73, 0x09, 0x08 }; static uint8_t g_payLoad7[] = { 0xB6, 0x5C, 0x5C, 0x05 }; static uint8_t g_payLoad8[] = { 0xB8, 0x23, 0x41, 0x32, 0x30, 0x03 }; static uint8_t g_payLoad9[] = { 0xBC, 0xD2, 0x0E, 0x63, 0x63, 0x5A, 0x32, 0x22, 0x14, 0x22, 0x03 }; static uint8_t g_payLoad10[] = { 0xb7, 0x41 }; static uint8_t g_payLoad11[] = { 0xC1, 0x0c, 0x10, 0x04, 0x0c, 0x10, 0x04 }; static uint8_t g_payLoad12[] = { 0xC2, 0x10, 0xE0 }; static uint8_t g_payLoad13[] = { 0xC3, 0x22, 0x11 }; static uint8_t g_payLoad14[] = { 0xD0, 0x07, 0xFF }; static uint8_t g_payLoad15[] = { 0xD2, 0x63, 0x0B, 0x08, 0x88 }; static uint8_t g_payLoad16[] = { 0xC6, 0x08, 0x15, 0xFF, 0x10, 0x16, 0x80, 0x60 }; static uint8_t g_payLoad17[] = { 0xc7, 0x04 }; static uint8_t g_payLoad18[] = { 0xC8, 0x7C, 0x50, 0x3B, 0x2C, 0x25, 0x16, 0x1C, 0x08, 0x27, 0x2B, 0x2F, 0x52, 0x43, 0x4C, 0x40, 0x3D, 0x30, 0x1E, 0x06, 0x7C, 0x50, 0x3B, 0x2C, 0x25, 0x16, 0x1C, 0x08, 0x27, 0x2B, 0x2F, 0x52, 0x43, 0x4C, 0x40, 0x3D, 0x30, 0x1E, 0x06 }; static uint8_t g_payLoad19[] = { 0x11 }; static uint8_t g_payLoad20[] = { 0x29 }; static DevHandle g_mipiHandle = NULL; static DevHandle g_pwmHandle = NULL;设置Reset Pin脚状态(/drivers_hdf_core/framework/model/display/driver/panel/mipi_icn9700.c)
static int32_t LcdResetOn(void) { int32_t ret; ret = GpioSetDir(RESET_GPIO, GPIO_DIR_OUT); if (ret != HDF_SUCCESS) { HDF_LOGE("GpioSetDir failure, ret:%d", ret); return HDF_FAILURE; } ret = GpioWrite(RESET_GPIO, GPIO_VAL_HIGH); if (ret != HDF_SUCCESS) { HDF_LOGE("GpioWrite failure, ret:%d", ret); return HDF_FAILURE; } /* delay 20ms */ OsalMSleep(20); return HDF_SUCCESS; }器件驱动入口函数(/drivers_hdf_core/framework/model/display/driver/panel/mipi_icn9700.c)
int32_t SampleEntryInit(struct HdfDeviceObject *object) { HDF_LOGI("%s: enter", __func__); if (object == NULL) { HDF_LOGE("%s: param is null!", __func__); return HDF_FAILURE; } /* 器件驱动接口注册,ops提供给平台驱动调用 */ if (PanelDataRegister(&g_panelData) != HDF_SUCCESS) { HDF_LOGE("%s: PanelDataRegister error!", __func__); return HDF_FAILURE; } return HDF_SUCCESS; } struct HdfDriverEntry g_sampleDevEntry = { .moduleVersion = 1, .moduleName = "LCD_SAMPLE", .Init = SampleEntryInit, }; HDF_INIT(g_sampleDevEntry);想学习更多华为鸿蒙HarmonyOS开发知识,在这里我为大家准备了华为鸿蒙HarmonyOS开发者资料大全,大家可以自行点击链接领取:《做鸿蒙应用开发到底学习些啥?》

其次就是考虑到市场上还没有系统性的学习资料,同时我也整理了一份《鸿蒙 (Harmony OS)开发学习手册》特意整理成PDF文档方式,分享给大家参考学习,大家可以根据自身情况进行获取:《鸿蒙开发学习指南》
《鸿蒙 (Harmony OS)开发学习手册》
一、入门必看
1. 应用开发导读(ArkTS)
2. 应用开发导读(Java)
3.......

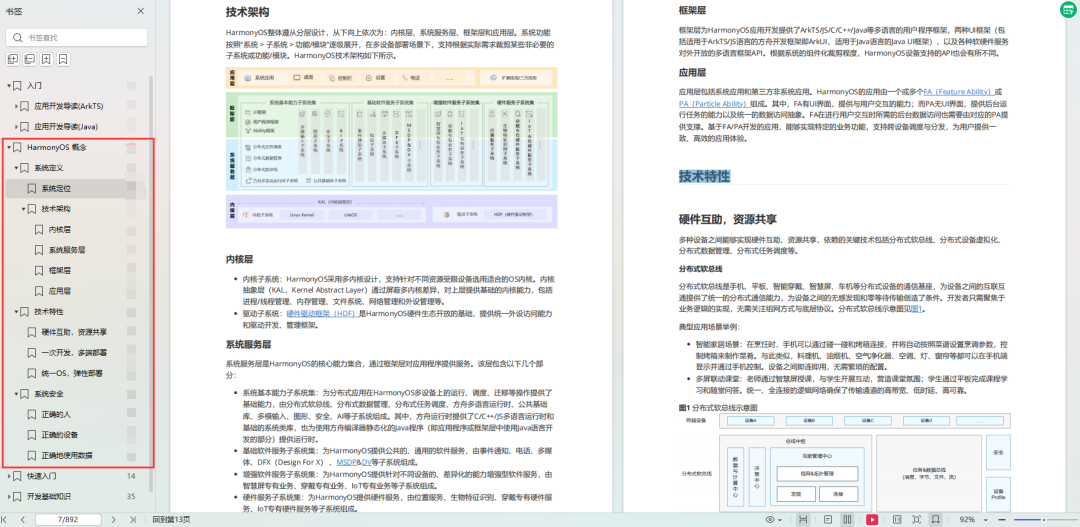
二、HarmonyOS 概念
1. 系统定义
2. 技术架构
3. 技术特性
4. 系统安全
5......
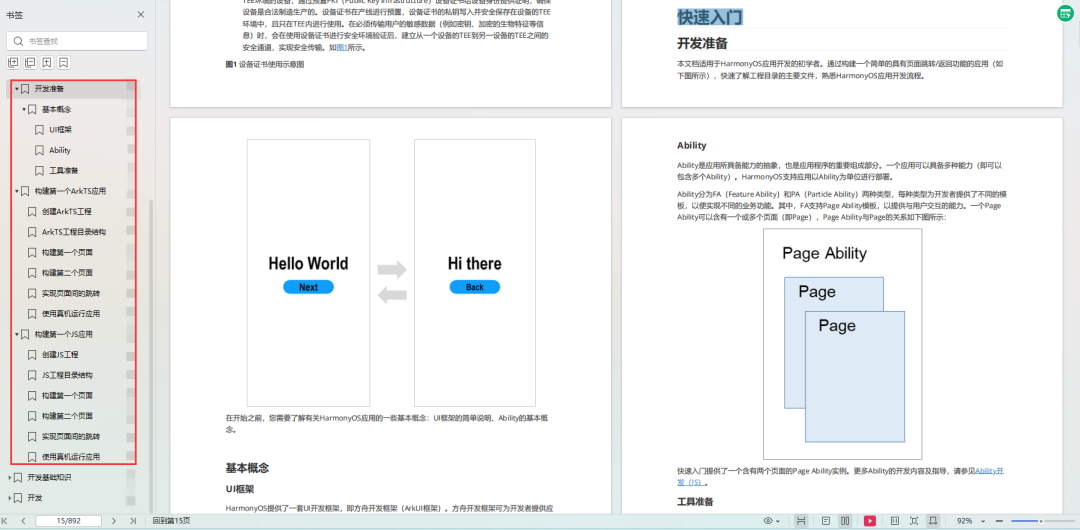
三、如何快速入门?《鸿蒙基础入门开发宝典!》
1. 基本概念
2. 构建第一个ArkTS应用
3. 构建第一个JS应用
4. ……
四、开发基础知识
1. 应用基础知识
2. 配置文件
3. 应用数据管理
4. 应用安全管理
5. 应用隐私保护
6. 三方应用调用管控机制
7. 资源分类与访问
8. 学习ArkTS语言
9. ……

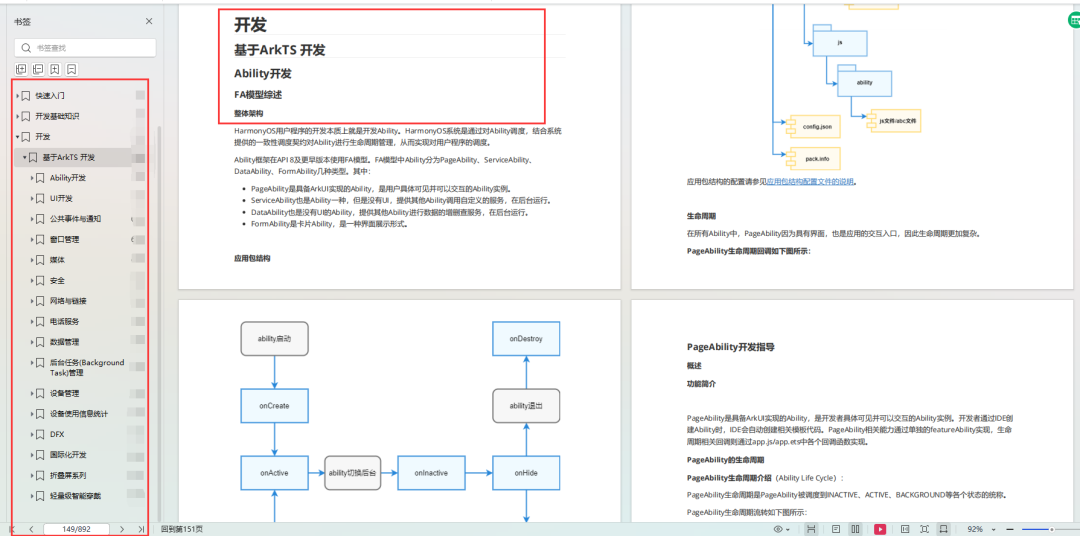
五、基于ArkTS 开发
1. Ability开发
2. UI开发
3. 公共事件与通知
4. 窗口管理
5. 媒体
6. 安全
7. 网络与链接
8. 电话服务
9. 数据管理
10. 后台任务(Background Task)管理
11. 设备管理
12. 设备使用信息统计
13. DFX
14. 国际化开发
15. 折叠屏系列
16. ……
更多了解更多鸿蒙开发的相关知识可以参考:《鸿蒙开发学习指南》