1. 目标
完成大作业T2
作业提示:

多线程方法主要包括以下几种(参考博客):
- MPI(多主机多线程开发),
- OpenMP(为单主机多线程开发而设计)
- SSE(主要增强CPU浮点运算的能力)
- CUDA
- Stream processing,
之前已经了解过std::thread和pthread,拓展1中makeHessian使用的是p_thread,这次正好用这几种方法与p_thread进行对比。
1. OpenMP
1.1 简单介绍
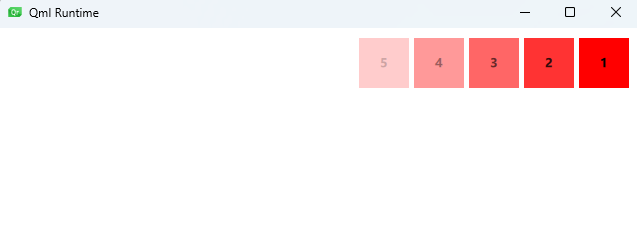
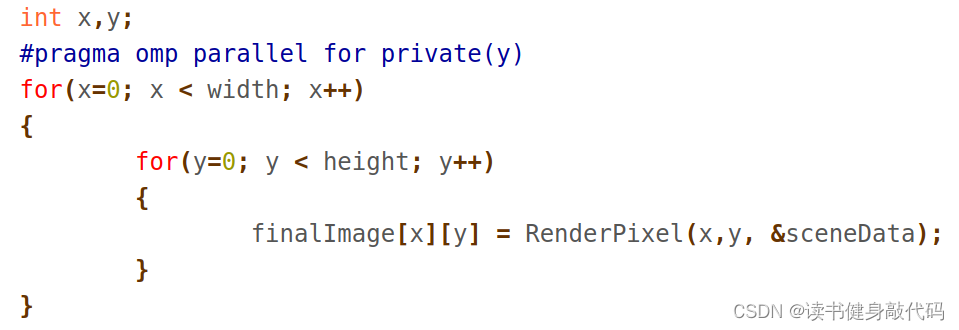
- 并行计算变量,共享则无需声明,如果需要该变量在每个线程中不同,则需要声明为private,如下,计算img中各个pixel的颜色,x共享,但y每个线程独立,即每个线程单独处理一行,都从第0列开始处理。
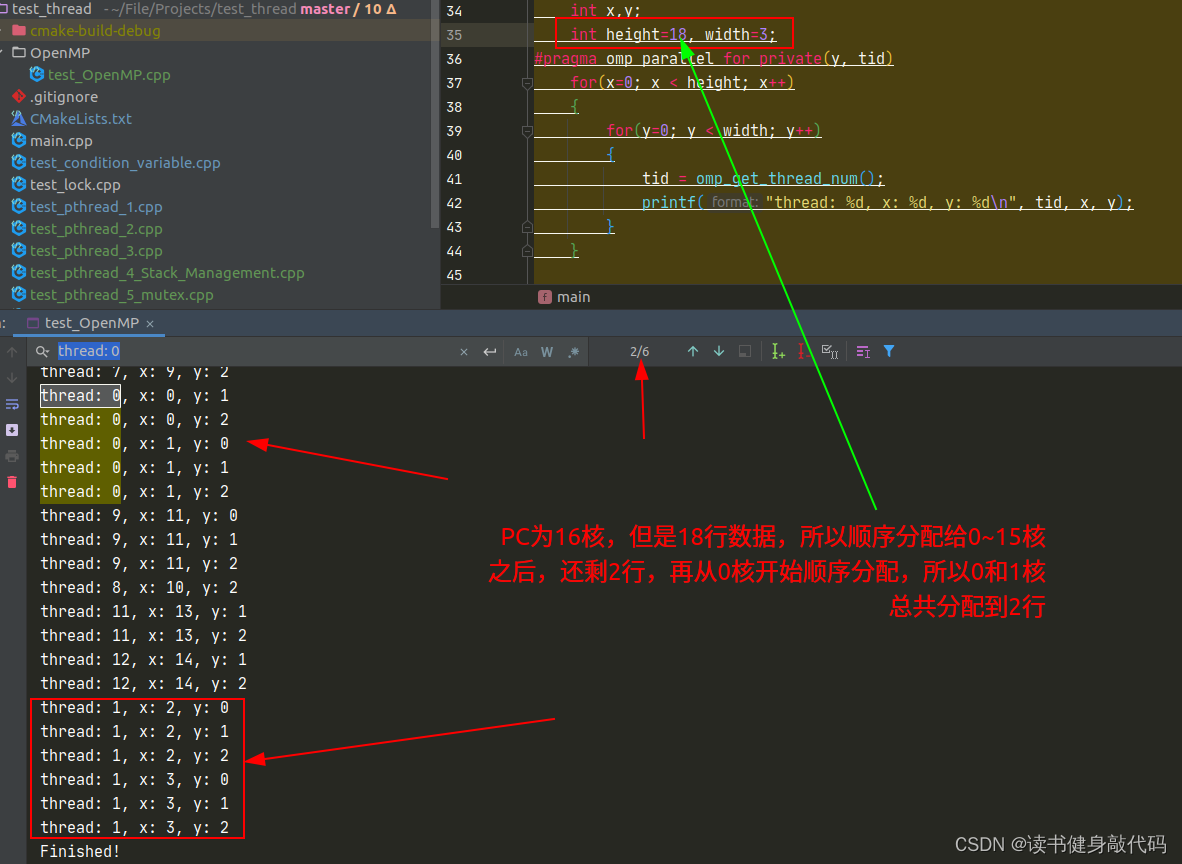
- 线程的分配方式是顺序分配给所有核(core),如果多于核的个数,则再从第0个核开始分配。
- 语法,大概为两种,一种是普通代码的多线程,另一种是循环的多线程:
//普通多线程
#pragma omp parallel private(shared_var, tid)
{
related code
}
//多线程循环
#pragma omp parallel for private(y, tid)
//循环的代码
for(){
for()//二层循环等,不是必须
}
//多线程结束,其它代码
1.2 快速上手
根据tutorial的实验代码:
#include <cstdio>
//#include "stdafx.h"
#include <omp.h>//需要的头文件
int main(int argc, char* argv[])
{
// This statement should only print once
printf("Starting Program!\n");
int nThreads, tid;
int shared_var = 200000;
int x,y;
int width=3, height=3;
#pragma omp parallel for private(y, tid)
for(x=0; x < height; x++)
{
for(y=0; y < width; y++)
{
tid = omp_get_thread_num();
printf("thread: %d, x: %d, y: %d\n", tid, x, y);
}
}
// We're out of the parallelized secion.
// Therefor, this should execute only once
printf("Finished!\n");
return 0;
}
Cmakelists:
find_package(OpenMP REQUIRED)
add_executable(test_OpenMP OpenMP/test_OpenMP.cpp)
target_link_libraries(test_OpenMP PUBLIC OpenMP::OpenMP_CXX)
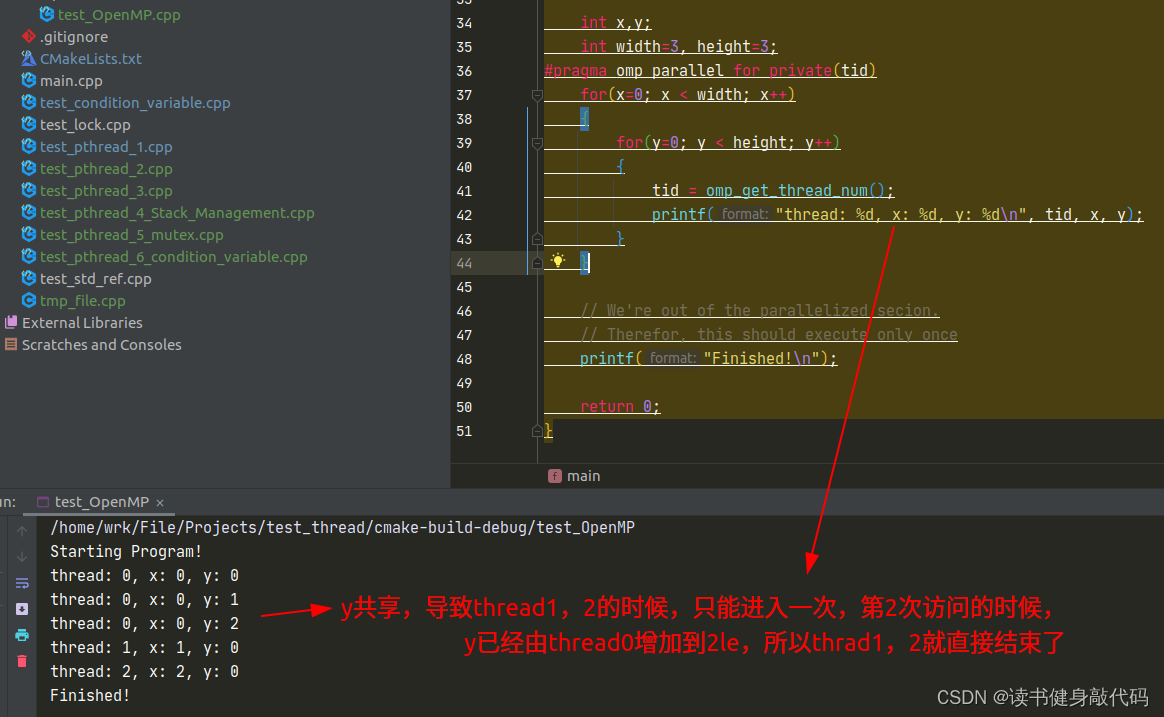
实验结果:
关于private的探究:
y为共享:
y为private

所以tutorial中的例程,意义是利用OpenMp多线程处理一张图片中的每一行,从每行的第0列开始处理:
for中线程的分配:
1.3 VINS-MONO移植
VINS-MONO中已经提供了pthread多线程和单线程makeHessian的方法,了解了OpenMP之后,我们需要使用单线程的方法,并告诉编译器使用OpenMP来进行,makeHessian代码如下:
void Solver::makeHessian()
{
int pos = 0;//Hessian矩阵整体维度
//it.first是要被marg掉的变量的地址,将其size累加起来就得到了所有被marg的变量的总localSize=m
//marg的放一起,共m维,remain放一起,共n维
for (auto &it : parameter_block_idx)
{
it.second = pos;//也算是排序1
pos += localSize(parameter_block_size[it.first]);//PQ7为改为6维
}
m = pos;//要被marg的变量的总维度
int tmp_n = 0;
//与[0]相关总维度
for (const auto &it : parameter_block_size)
{
if (parameter_block_idx.find(it.first) == parameter_block_idx.end())//将不在drop_set中的剩下的维度加起来,这一步实际上算的就是n
{
parameter_block_idx[it.first] = pos;//排序2
tmp_n += localSize(it.second);
pos += localSize(it.second);
}
}
n = pos - m;//remain变量的总维度,这样写建立了n和m间的关系,表意更强
ROS_DEBUG("\nn: %d, tmp_n: %d", n, tmp_n);
ROS_DEBUG("\nSolver, pos: %d, m: %d, n: %d, size: %d", pos, m, n, (int)parameter_block_idx.size());
TicToc t_summing;
Eigen::MatrixXd A(pos, pos);//总系数矩阵
Eigen::VectorXd b(pos);//总误差项
A.setZero();
b.setZero();
Hessian_.resize(pos,pos);
b_.resize(pos);
delta_x_.resize(pos);
//multi thread
TicToc t_thread_summing;
ROS_DEBUG("\nmulti thread: %s", MULTI_THREAD.c_str());
if(MULTI_THREAD=="pthread") {
pthread_t tids[NUM_THREADS];//4个线程构建
//携带每个线程的输入输出信息
ThreadsStruct threadsstruct[NUM_THREADS];
//将先验约束因子平均分配到4个线程中
int i = 0;
for (auto it : factors)
{
threadsstruct[i].sub_factors.push_back(it);
i++;
i = i % NUM_THREADS;
}
//将每个线程构建的A和b加起来
for (int i = 0; i < NUM_THREADS; i++)
{
TicToc zero_matrix;
threadsstruct[i].A = Eigen::MatrixXd::Zero(pos,pos);
threadsstruct[i].b = Eigen::VectorXd::Zero(pos);
threadsstruct[i].parameter_block_size = parameter_block_size;//marg里的block_size,4个线程共享
threadsstruct[i].parameter_block_idx = parameter_block_idx;
int ret = pthread_create( &tids[i], NULL, ThreadsConstructA ,(void*)&(threadsstruct[i]));//参数4是arg,void*类型,取其地址并强制类型转换
if (ret != 0)
{
ROS_WARN("pthread_create error");
ROS_BREAK();
}
}
//将每个线程构建的A和b加起来
for( int i = NUM_THREADS - 1; i >= 0; i--)
{
pthread_join( tids[i], NULL );//阻塞等待线程完成,这里的A和b的+=操作在主线程中是阻塞的,+=的顺序是pthread_join的顺序
A += threadsstruct[i].A;
b += threadsstruct[i].b;
}
} else if(MULTI_THREAD=="openmp") {
//OpenMP多线程
#pragma omp parallel for
for(size_t k = 0; k < factors.size(); ++k) { // for (auto it : factors){
ResidualBlockInfo* it = factors[k];
//J^T*J
for (int i = 0; i < static_cast<int>(it->parameter_blocks.size()); i++)
{
int idx_i = parameter_block_idx[reinterpret_cast<long>(it->parameter_blocks[i])];//要被marg的second=0
int size_i = localSize(parameter_block_size[reinterpret_cast<long>(it->parameter_blocks[i])]);
Eigen::MatrixXd jacobian_i = it->jacobians[i].leftCols(size_i);//remain变量的初始jacobian
for (int j = i; j < static_cast<int>(it->parameter_blocks.size()); j++)
{
int idx_j = parameter_block_idx[reinterpret_cast<long>(it->parameter_blocks[j])];
int size_j = localSize(parameter_block_size[reinterpret_cast<long>(it->parameter_blocks[j])]);
Eigen::MatrixXd jacobian_j = it->jacobians[j].leftCols(size_j);//marg变量的初始jacobian
//主对角线,注意这里是+=,可能之前别的变量在这个地方已经有过值了,所以要+=
if (i == j)
A.block(idx_i, idx_j, size_i, size_j) += jacobian_i.transpose() * jacobian_j;
//非主对角线
else
{
A.block(idx_i, idx_j, size_i, size_j) += jacobian_i.transpose() * jacobian_j;
A.block(idx_j, idx_i, size_j, size_i) = A.block(idx_i, idx_j, size_i, size_j).transpose();
}
}
b.segment(idx_i, size_i) += jacobian_i.transpose() * it->residuals;//J^T*e
}
// ROS_DEBUG("\nTotal number of threads: %d\n", omp_get_num_threads());
}
}
//统计multi thread makeHessian时间
double pure_finish_time = t_thread_summing.toc();
*pure_makeHessian_time_sum_ += pure_finish_time;
++(*pure_makeHessian_times_);
ROS_DEBUG("\nt_thread_summing cost: %f ms, avg_pure_makeHessian_time: %f ms, pure_makeHessian_time_sum_: %f, pure_makeHessian_times_: %f",
t_thread_summing.toc(), (*pure_makeHessian_time_sum_)/(*pure_makeHessian_times_), *pure_makeHessian_time_sum_, *pure_makeHessian_times_);
Hessian_ = A;
b_ = -b;
//DOGLEG需反解出J和e
if(method_==solve::Solver::kDOGLEG) {
TicToc t_solve_J;
TicToc t_SelfAdjoint;
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> saes2(A);//这一句24.3ms
ROS_DEBUG("\nt_SelfAdjoint cost: %f ms", t_SelfAdjoint.toc());
Eigen::VectorXd S = Eigen::VectorXd((saes2.eigenvalues().array() > eps).select(saes2.eigenvalues().array(), 0));
Eigen::VectorXd S_sqrt = S.cwiseSqrt();//开根号
linearized_jacobians = S_sqrt.asDiagonal() * saes2.eigenvectors().transpose();
Eigen::VectorXd S_inv = Eigen::VectorXd((saes2.eigenvalues().array() > eps).select(saes2.eigenvalues().array().inverse(), 0));
Eigen::VectorXd S_inv_sqrt = S_inv.cwiseSqrt();
linearized_residuals = S_inv_sqrt.asDiagonal() * saes2.eigenvectors().real().transpose() * b;
ROS_DEBUG("\nt_solve_J cost: %f ms", t_solve_J.toc());//25ms
}
}
其中注意for循环的写法,OpenMP似乎只支持for(int i=0; i<10; ++i)这种类型的循环,使用
for(auto i t :factors)这种写法则编译不过。
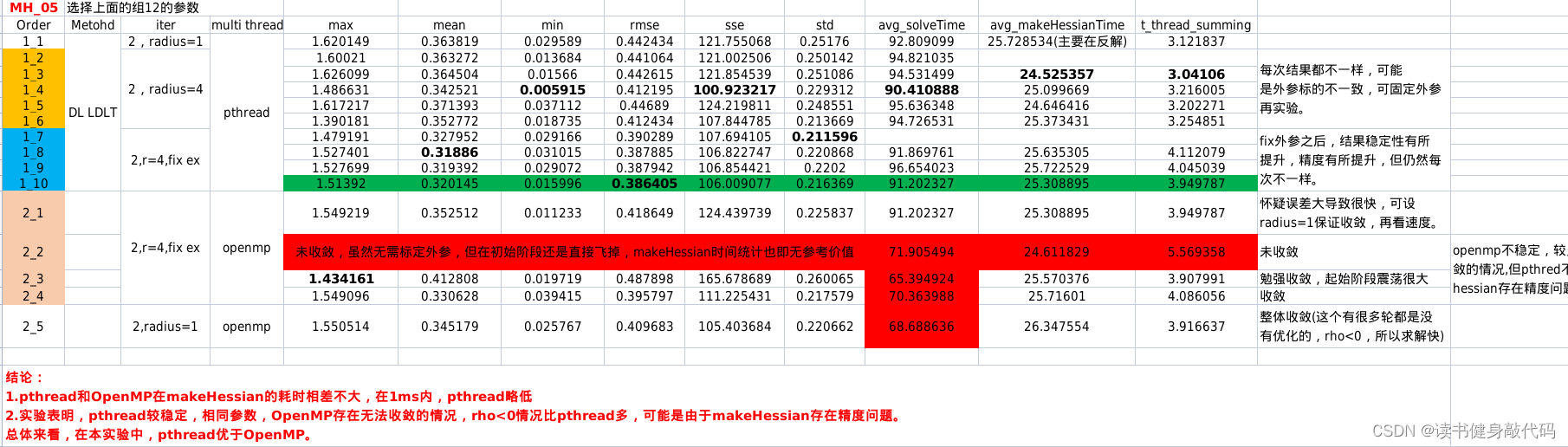
实验发现,openmp makeHessian的精度可能比pthread差,查看原因是
ρ
\rho
ρ经常
<
0
<0
<0,怀疑Hessian精度问题。makeHessian的时间跟Hessian的稠密程度也有关,发散时的makeHessian速度也很快,因为非常稀疏。所以对makeHessian速度的对比需要在收敛的情况下进行。
1.4 pthread与OpenMP对比
对比实验结果如下,倾向于使用pthread:
2024.1.9更新
关于每次优化结果不相同,在《Square Root Bundle Adjustment for Large-Scale Reconstruction》这篇文章中可能找到了一些原因:LM和DL频繁地rollback会导致 round-off errors,进而导致Schur complimnt based方法数值不稳定。而SBA这篇文章的
B
A
\sqrt{BA}
BA方法一直很稳定(不确定是否每次优化结果相同。)

2. SSE
SSE 的指令集是 X86 架构 CPU 特有的,对于 ARM 架构、MIPS 架构等 CPU
是不支持的,所以使用了 SSE 指令集的程序,是不具备可移植标准的。而移动机器人平台
使用的 CPU 大多为了保证低功耗采用了 ARM 架构,所以这样的加速在移动机器人平台上
会失效。
大概看了下SSE的用法,如果需要用SSE,可能需要大改VINS-MONO中的数据结构,有些不划算,暂不考虑。
3. CUDA
参考文章
4. tbb
在复现21年CVPR square root BA过程中使用了tbb,特此记录。
以下大部分内容来自GPT3.5:
tbb::parallel_reduce 是 Intel 的 Threading Building Blocks(TBB)库中的一个算法,用于并行地执行可结合和可交换的二进制操作。它的主要目的是将一个可迭代的范围(比如一个数组或迭代器范围)的元素进行归约操作。
4.1 tbb::parallel_reduce用法简介
下面是 tbb::parallel_reduce 的基本用法:
#include <tbb/parallel_reduce.h>
#include <tbb/blocked_range.h>
// 定义一个结构体,用于存储并行归约的状态
template<typename T>
struct SumOperator {
T sum;
// 构造函数,初始化 sum
SumOperator() : sum(0) {}
// 归约操作
void operator()(const tbb::blocked_range<T*>& range) {
T local_sum = sum;
for (T* i = range.begin(); i != range.end(); ++i) {
local_sum += *i;
}
sum = local_sum;
}
// 合并操作,将两个状态合并
void join(const SumOperator& other) {
sum += other.sum;
}
};
int main() {
const int size = 1000;
int data[size];
// 初始化数据
for (int i = 0; i < size; ++i) {
data[i] = i;
}
// 定义并行归约的范围
tbb::blocked_range<int*> range(data, data + size);
// 创建归约对象
SumOperator<int> sumOperator;
// 使用 tbb::parallel_reduce 执行并行归约
tbb::parallel_reduce(range, sumOperator);
// 输出结果
std::cout << "Sum: " << sumOperator.sum << std::endl;
return 0;
}
在上述示例中,我们定义了一个 SumOperator 结构体,其中包含了归约的状态和相关的操作。在 main 函数中,我们首先初始化了一个数据数组,然后定义了一个 tbb::blocked_range 来表示归约的范围。接着,我们创建了一个 SumOperator 对象,并使用 tbb::parallel_reduce 来执行并行归约。最后,我们输出了结果。
SumOperator 结构体中的 operator() 函数定义了归约的操作,而 join 函数定义了两个状态如何合并。这两个函数是 tbb::parallel_reduce 算法所必需的。根据归约操作来定义相应的结构体和函数。
4.2 什么是规约?
在并行计算中,“规约”(Reduction)指的是将多个值合并成一个值的过程。典型的规约操作包括对一组数值进行求和、求平均值、找到最大或最小值等。规约在并行计算中非常重要,因为它可以将计算分散到多个处理单元,然后将结果合并成单个值。
在上下文中,规约的基本思想是将一个大问题分解成多个小问题,每个小问题在独立的处理单元上计算。然后,通过合并这些小问题的结果,得到整体问题的解。这种方法可以提高计算效率,特别是在大规模数据集或高性能计算环境中。
常见的规约操作有:
- 求和(Summation): 将一组数值相加得到总和。
- 求平均值(Average): 将一组数值相加后除以总数量得到平均值。
- 最大值(Maximum)和最小值(Minimum): 找到一组数值中的最大值或最小值。
- 位运算规约: 对一组位进行操作,如按位与、按位或等。
在并行计算中,规约操作需要考虑同步和合并的问题,以确保正确性和性能。例如,归约操作中涉及的每个部分都需要在合并之前正确地完成计算,而合并的方式取决于具体的规约操作。
4.3 简单测试
计算 Σ B E G I N E N D \Sigma_{BEGIN}^{END} ΣBEGINEND,看多线程tbb和单线程谁更快:
#include <iostream>
#include <tbb/tbb.h>
#include "../Utility/tic_toc.h"
using Scalar = int64_t;
#define BEGIN 1
#define END 1e11
template<typename Scalar>
Scalar testTBB(void) {
Scalar sum = tbb::parallel_reduce(
tbb::blocked_range<size_t>(BEGIN,END),
Scalar(0),
[&](tbb::blocked_range<size_t> range, Scalar localSum) {
for(Scalar i = range.begin(); i< range.end(); ++i) {
localSum += i;
}
return localSum;
},
std::plus<Scalar>()
);
return sum;
}
Scalar singleThread(void) {
return [](Scalar begin, Scalar end){
Scalar local_sum = 0;
for(Scalar i=begin; i<end; ++i) {
local_sum += i;
}
return local_sum;
}(BEGIN, END);
}
int main(int argc, char** argv) {
TicToc t_tbb;
std::cout << "tbb sum result = " << testTBB<Scalar>() << ", cost " << t_tbb.toc() << " ms" << std::endl;
TicToc t_single_thread;
std::cout << "t_single_thread sum result = " << singleThread() << ", cost " << t_single_thread.toc() << " ms" << std::endl;
}




当数据很大时注意数据溢出问题,最好使用int64_t。
测试表明:中小规模问题其实单线程更快,tbb可能把时间都花在了Reduction上,而大规模问题,tbb更快,所以大规模求解问题可能更适合使用并行计算。
4.3 复现代码分析
/* 遍历每一个 landmark block,基于当前相机 pose 和特征点的 position 来预计算误差 r */
/* 同时,计算 vo problem 的整体误差 */
//this->sumCost = tbb::parallel_reduce(range, identity, real_body, reduction);,即 this->sumCost = 并行reduction( real_body(range, identity) )
template<typename Scalar>
bool ProblemVO<Scalar>::PrecomputeResidual(void) {
this->sumCost = tbb::parallel_reduce(
tbb::blocked_range<size_t>(0, landmarkBlocks.size()),// 参数1:迭代范围
Scalar(0), // 参数2:初始值
// 参数3:lambda 函数,定义局部操作
[&] (tbb::blocked_range<size_t> range, Scalar localSum) {
for (size_t i = range.begin(); i < range.end(); ++i) {
this->landmarkBlocks[i]->PrecomputeResidual();
auto observes = this->landmarkBlocks[i]->GetObserves();
for (auto &ob : observes) {
// 这里计算的是每一个观测误差的带核函数的马氏距离,即 rho(r.T * S * r)
localSum += ob.second->kernel->y;
}
}
return localSum;
},
std::plus<Scalar>() // 参数4 Reduction:合并操作(同样还有std::minus<Scalar>, std::multiplies<Scalar>等reduction操作)
);
// std::cout << "this->sumCost is " << this->sumCost << std::endl;
return true;
}
这段代码是一个用于预计算误差的函数,其中使用了 Threading Building Blocks (TBB) 库的 tbb::parallel_reduce 算法来并行地处理每个 landmark block 中的特征点观测误差。
主要步骤如下:
-
landmarkBlocks 是一组 landmark block 的集合,使用 tbb::parallel_reduce 并行处理每个 landmark block。这里,每个 landmark block 都调用了 PrecomputeResidual 函数,该函数用于预计算每个特征点的观测误差。
-
在每个 landmark block 中,通过 this->landmarkBlocks[i]->GetObserves() 获取该 landmark block 中的观测信息。
-
对于每个观测,计算观测误差的带核函数的马氏距离,即 ρ ( r T ∗ S ∗ r ) \rho(r^T*S*r) ρ(rT∗S∗r),其中 r r r为观测误差,
ρ ρ ρ 为核函数, S S S 为权重矩阵。将每个观测误差的带核函数的马氏距离加到局部和 localSum 中。 -
tbb::parallel_reduce 最后将每个线程的局部和进行合并,最终得到整体的 sumCost。在此例中,sumCost 是所有观测误差的带核函数的马氏距离的总和。
-
函数返回 true 表示计算完成。
需要注意的是,由于使用了 TBB 的并行计算,每个线程可以独立地计算不同 landmark block 中的观测误差,提高了计算效率。最后通过 std::plus() 实现了对所有线程的局部和的合并,得到整体的误差和 sumCost。
tbb::parallel_reduce传参分析:
-
参数1:迭代范围
(tbb::blocked_range<size_t>(0, landmarkBlocks.size()))
这是一个描述迭代范围的对象,表示 landmarkBlocks 的索引范围。在这里,它表示了从0到 landmarkBlocks.size() 的范围。 -
参数2:初始值
(Scalar(0))
初始值用于初始化归约的结果。在这里,localSum 被初始化为 Scalar 类型的零值。 -
参数3:lambda 函数
([&] (tbb::blocked_range<size_t> range, Scalar localSum) {...})
这是一个 lambda 函数,定义了并行操作的局部计算。它接收一个表示当前迭代范围的 tbb::blocked_range 对象和一个局部和 localSum,并在该范围上执行计算。lambda 函数的返回值是局部和,将被传递给合并操作。 -
参数4:合并操作
(std::plus<Scalar>())
这是一个函数对象,用于定义如何合并两个局部和。在这里,使用了 std::plus(),表示将两个 Scalar 类型的值相加。这个函数对象将被用于合并不同线程的局部和,得到整体的结果。
参数1和参数2分别传给lambda函数的两个参数,lambda函数的返回值是每个线程的返回值,参数4的Reduction操作将每个线程的返回值进行合并,所以整段代码可以这样理解:
this->sumCost = tbb::parallel_reduce(range, identity, real_body, reduction);
即
this->sumCost = 并行reduction( real_body(range, identity) );
4.4 tbb拓展
在debug时,tbb多线程打印出来的东西是乱序的,无法进行debug,所以前期可以设置为单线程先debug,保证代码单线程能正常运行后再开启多线程。
// 在 TBB 中,可以使用 tbb::global_control 类来设置线程数
tbb::global_control control(tbb::global_control::max_allowed_parallelism, 1);
// 获取机器上允许的最大并发线程数
int maxConcurrency = tbb::this_task_arena::max_concurrency();