这次来分享上次没说完的输入捕获的知识点
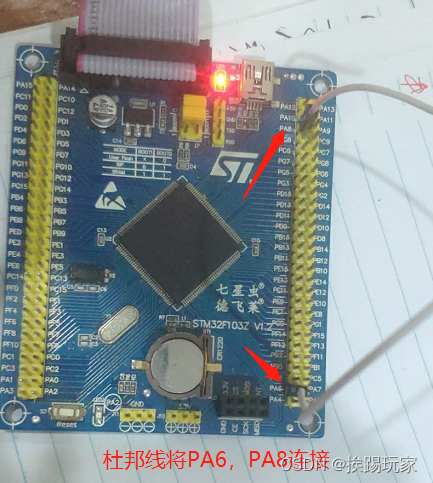
实验中用到两个引脚,一个是通用定时器 TIM3 的通道 1,即 PA6,用于输出 PWM 信号,另一
个是高级控制定时器 TIM1 的通道 1,即 PA8,用于 PWM 输入捕获,实验中直接用一根杜邦线
短接即可 PA6 和 PA8 即可,同时可用示波器监控 PA6 的波形,看看实验捕获的数据是否正确。
PA6:用定时器的输出比较功能输出波形。
PA8:用定时器的输入捕获功能捕获波形。
步骤
1.通用定时器产生 PWM 配置
2.高级定时器 PWM 输入配置
3.编写中断服务程序,计算测量的频率和占空比,并仿真调试看是否一致。
编程的要点主要分成两部分,一个是通用定时器的 PWM 信号输出,另一个是 PWM 信号输入捕
获。
下面就贴出代码,全文跟着我操作,可以和我实现一样的效果
1.定时器产生 PWM 配置(输出比较)
1.1 配置GPIO
由于我们用到的是PA6,那么就配置PA6复用推挽输出就行,因为他用的不是普通GPIO口的功能,而是TIM3_CH1所以要用到复用功能,同时开启复用的时钟。

1.2 初始化定时器


1.3 初始化输出比较

最后在最上面加上,使能一下TIM3的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);这样就可以产生50%占空比的波形了,周期频率那些由Psc, arr来决定
那么现在我们用示波器量一下看看到底是不是50%的占空比

实际测量,的确是的。那么下面就开始写输入捕获的代码
2.定时器 PWM 输入配置
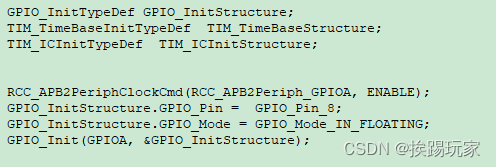
1.1 配置GPIO
由于我们用到的是PA8,那么就配置PA8,但是这次要配置成浮空输入模式
1.2配置中断(因为我们要用到捕获和溢出处理中断)
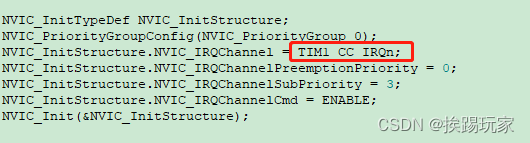
中断通道别选错
1.3 初始化定时器

我们可以算出计数器的计数周期为 T=72M/72=1uS,1us*1000=1MS,这个是定时
器在不溢出的情况下的最大计数周期,也就是说周期小于 1ms 的 PWM 信号都可以被捕获到,转
换成频率就是能捕获到的最小的频率为 1KHZ。
1.4 初始化输入捕获功能

因为是 PWM 输入模式,只能使用通道 1 和通道 2 ,假如我们使用的是通道 1,即 TI1,输入
的 PWM 信号会被分成两路,分别是 TI1FP1 和 TI1FP2,两路都可以是触发信号。如果选择
TI1FP1 为触发信号,那么 IC1 捕获到的是 PWM 信号的周期,IC2 捕获到的是占空比,这种
输入通道 TI 和捕获通道 IC 的映射关系叫直连,输入捕获结构体的 TIM_ICSelection 要配置为
TIM_ICSelection_DirectTI。如果选择 TI1FP2 为触发信号,则 IC2 捕获到的是周期,IC1 捕获到的是占空比,这种输入通道 TI 和捕获通道 IC 的映射关系叫非直连,输入捕获结构体的 TIM_ICSelection要配置为 TIM_ICSelection_IndirectTI。有关输入通道 TI 和捕获通道 IC 的具体映射关系见图输入通道 TI 和捕获通道 IC 的映射图 ,有直连和非直连两种。

好,我们来分析上上面的一大堆术语。
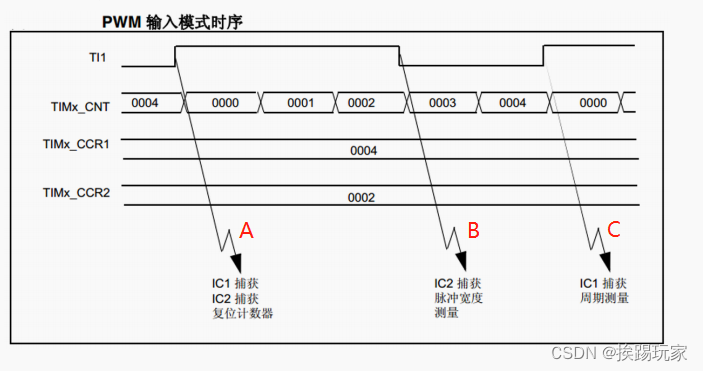
Q:如果选择TI1FP1 为触发信号,那么 IC1 捕获到的是 PWM 信号的周期,IC2 捕获到的是占空比。这句话怎么理解呢?
A点:由于上面的输入捕获的配置。当捕获到 PWM 信号的第一个上升沿时,产生中断,计数器被复位,锁存到捕获寄存器 IC1 和 IC2的值都为 0。
B点:当下降沿到来时,IC2 会捕获,对应的是占空比,但是会产生中断。
C点:当捕获到第二个上升沿时,IC1 会捕获,对应的是周期,而且会再次进入中断,这个时间就可以根据 IC1 和 IC2的值计算出频率和占空比。
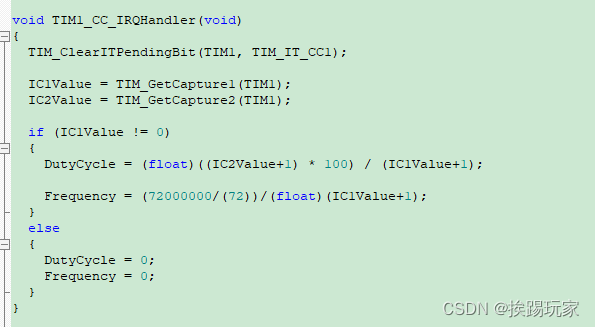
中断复位函数中,我们获取输入捕获寄存器 CCR1 和 CCR2 寄存器中的值,当 CCR1 的值不为 0
时,说明有效捕获到了一个周期,然后计算出频率和占空比。在计算的时候 CCR1 和 CCR2 的值
都必须要加 1,因为计数器是从 0 开始计数的。
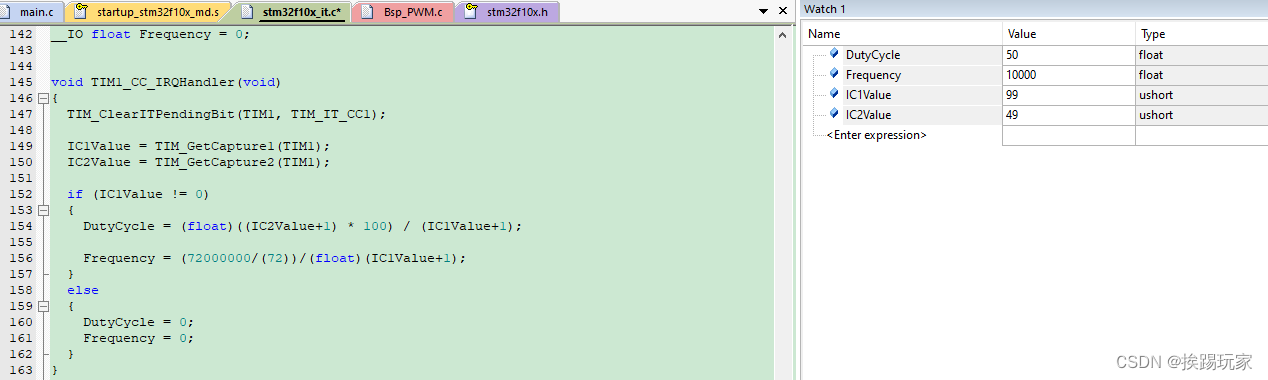
现在我们全速跑代码看看是否一致,还是很准的
全文就是这样,非常的简单易懂