文章目录
- 04 帧 Frame
- 4.1 相机相关信息
- 4.2 特征点提取
- 4.2.1 特征点提取 ExtractORB()
- 4.3 ORB-SLAM2对双目/RGBD特征点的预处理
- 4.3.1 双目视差公式
- 4.3.2 双目图像特征点匹配 ComputeStereoMatches()
- 4.3.3 根据深度信息构造虚拟右目图像:`ComputeStereoFromRGBD()`
- 4.4 畸变矫正:`UndistortKeyPoints()`
- 4.5 特征点分配:`AssignFeaturesToGrid()`
- 4.5 构造函数 `Frame()`
- 4.6 `Frame` 类的用途
04 帧 Frame
4.1 相机相关信息
Frame 类与相机相关的参数大部分都设为 static 类型,系统内所有的 Frame 对象共享一份相机参数。
| 成员函数/变量 | 访问控制 | 意义 |
|---|---|---|
static bool mbInitialComputations | public static | 是否需要为 Frame 类的相机参数赋值 |
初始化为 true,第一次为相机参数赋值后变为 false | ||
static float fx fy static float cx cy static float invfx invfy | public static | 相机内参 |
cv::Mat mK | public | 相机内参矩阵 |
float mb | public | 双目相机基线 |
float mbf | public | 相机基线与焦距的乘积 |
这些参数首先由 Tracking 对象从 yaml 配置文件内读入,再传给 Frame 类的构造函数,第一次调用 Frame 的构造函数时为这些成员变量赋值.
4.2 特征点提取
在 Frame 类构造函数中调用成员变量 mpORBextractorLeft 和 mpORBextractorRight 进行特征点提取。
| 成员函数/变量 | 访问控制 | 意义 |
|---|---|---|
ORBextractor* mpORBextractorLeft ORBextractor* mpORBextractorRight | public | 左右目特征点提取器 |
cv::Mat mDescriptors cv::Mat mDescriptorsRight | public | 左右目图像特征点描述子 |
std::vector<cv::KeyPoint> mvKeysstd::vector<cv::KeyPoint> mvKeysRight | public | 畸变矫正前的左右目特征点 |
std::vector<cv::KeyPoint> mvKeysUn | public | 矫正后的左目特征点(对应mvKeys) |
std::vector<float> mvuRight | public | 左目特征点在右目中匹配特征点的横坐标(左右目匹配特征点的纵坐标相同) |
std::vector<float> mvDepth | public | 特征点深度 |
float mThDepth | public | 判断单目特征点和双目特征点的阈值 深度低于该值得特征点被认为是双目特征点 深度低于该值得特征点被认为是单目特征点 |
mvKeys、 mvKeysUn、mvuRight、mvDepth 的坐标索引是对应的,也就是说对于第 i 个图像特征点:
-
其矫正前的左目特征点是
mvKeys[i]; -
矫正后的左目特征点是
mvKeysUn[i]; -
其在右目中对应的特征点的横坐标为
mvuRight[i],纵坐标与mKeys[i]相同; -
特征点深度为
mvDepth[i]
对于单目特征点(单目相机输入的特征点或没有找到右目匹配的左目图像特征点),其 mvuRight 和 mvDepth 均为 -1。
4.2.1 特征点提取 ExtractORB()
| 成员函数/变量 | 访问控制 | 意义 |
|---|---|---|
void ExtractORB(int flag, const cv::Mat &im) | public | 直接调用 orbExtractor 提取特征点 |
void Frame::ExtractORB(int flag, const cv::Mat &im)
{
if(flag==0)
(*mpORBextractorLeft)(im,cv::Mat(),mvKeys,mDescriptors);
else
(*mpORBextractorRight)(im,cv::Mat(),mvKeysRight,mDescriptorsRight);
}
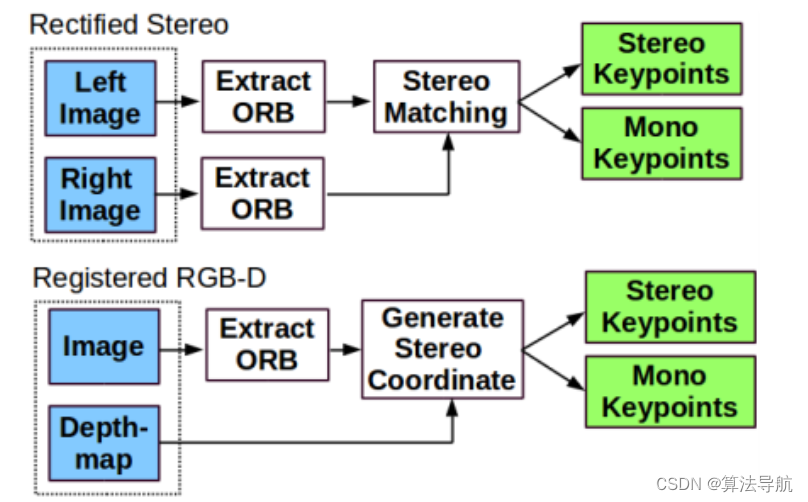
4.3 ORB-SLAM2对双目/RGBD特征点的预处理
双目/RGBD 相机可以得到特征点的立体信息,包括右目特征点信息(mvuRight)、特征点深度信息(mvDepth):
- 对于双目相机,通过双目特征点匹配关系计算特征点的深度值;
- 对于 RGBD 相机,根据特征点深度构造虚拟的右目图像特征点。
| 成员函数/变量 | 访问控制 | 意义 |
|---|---|---|
void ComputeStereoMatches() | public | 双目图像特征点匹配,用于双目相机输入图像预处理 |
void ComputeStereoFromRGBD(const cv::Mat &imDepth) | public | 根据深度信息构造虚拟右目图像,用于RGBD相机输入图像预处理 |
cv::Mat UnprojectStereo(const int &i) | public | 根据深度信息将第 i 个特征点反投影成 MapPoint |
通过这种预处理,在后面 SLAM 系统的其他部分中不用再区分双目特征点和 RGBD 特征点,它们都会以双目特征点的形式被处理(仅通过判断 mvuRight[idx] 判断某特征点是否有深度)。
4.3.1 双目视差公式
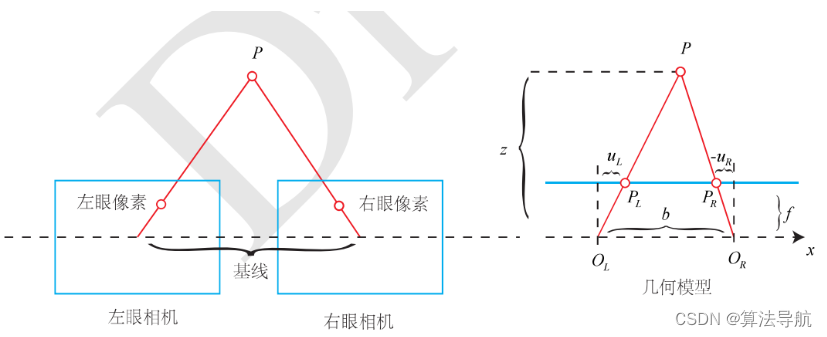
根据三角形相似关系
z − f z = b − u L + u R b \frac{z-f}{z}=\frac{b-u_L+u_R}{b} zz−f=bb−uL+uR
整理,得
z = f b d , d = u L − u R z=\frac{f b}{d}, \quad d=u_L-u_R z=dfb,d=uL−uR
其中, z z z 为观测距离(深度), b b b 为基线, f f f 为焦距, d d d 为视差。
4.3.2 双目图像特征点匹配 ComputeStereoMatches()
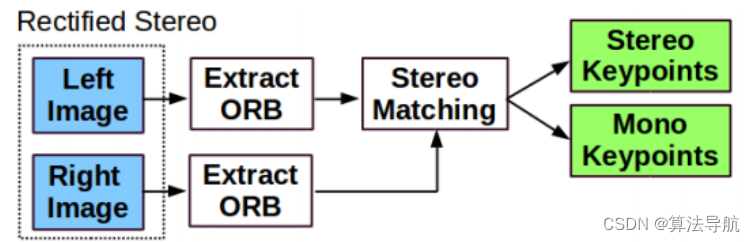
双目相机分别提取到左右目特征点后对特征点进行双目匹配,并通过双目视差估计特征点深度。双目特征点匹配步骤:
(1)粗匹配:根据特征点描述子距离和金字塔层级判断匹配.粗匹配关系是按行寻找的,对于左目图像中每个特征点,在右目图像对应行上寻找匹配特征点。
(2)精匹配: 根据特征点周围窗口内容相似度判断匹配。
(3)亚像素插值: 将特征点相似度与匹配坐标之间拟合成二次曲线,寻找最佳匹配位置(得到的是一个小数)。
(4)记录右目匹配 mvuRight 和深度 mvDepth 信息。
(5)离群点筛选: 以平均相似度的 2.1 倍为标准,筛选离群点。

4.3.3 根据深度信息构造虚拟右目图像:ComputeStereoFromRGBD()
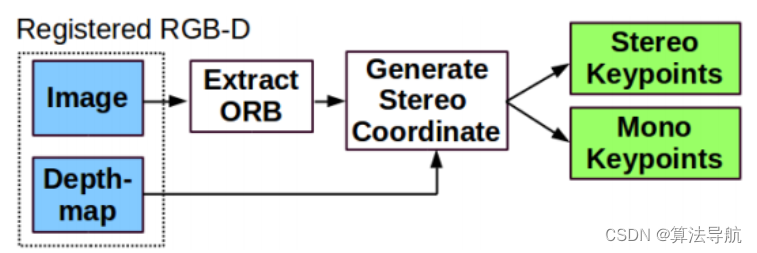
对于 RGBD 特征点,根据深度信息构造虚拟右目图像(视差公式)。这样在就可以将 RGBD 图像和双目图像归为一类,便于程序处理。
4.4 畸变矫正:UndistortKeyPoints()
| 成员函数/变量 | 访问控制 | 意义 |
|---|---|---|
cv::Mat mDistCoef | public | 相机的畸变矫正参数 |
std::vector<cv::KeyPoint> mvKeysstd::vector<cv::KeyPoint> mvKeysRight | public | 原始左/右目图像提取出的特征点(未校正) |
std::vector<cv::KeyPoint> mvKeysUn | public | 畸变矫正后的左目特征点 |
void UndistortKeyPoints() | public | 矫正特征点(仅对单目和RGBD) |
static float mnMinX,mnMaxX static float mnMinY,mnMaxY | public | 畸变矫正后的图像边界 |
void ComputeImageBounds(const cv::Mat &imLeft) | private | 计算畸变矫正后的图像边界 |
畸变矫正只对单目和 RGBD 相机输入图像有效,双目相机的畸变矫正参数均为 0,因为双目相机数据集在发布之前已经预先做了 双目矫正。
4.5 特征点分配:AssignFeaturesToGrid()
在对特征点进行预处理后,将特征点分配到 48 行 64 列的网格中以加速匹配。
| 成员函数/变量 | 访问控制 | 意义 |
|---|---|---|
FRAME_GRID_ROWS=48FRAME_GRID_COLS=64 | #DEFINE 宏 | 网格行数/列数 |
static float mfGridElementWidthInv mfGridElementHeightInv | public static | 每个网格的宽度/高度 |
std::vector<std::size_t> mGrid[FRAME_GRID_COLS][FRAME_GRID_ROWS] | public | 每个网格内特征点编号列表 |
void AssignFeaturesToGrid() | private | 将特征点分配到网格中 |
vector<size_t> GetFeaturesInArea(const float &x, const float &y, const float &r, const int minLevel=-1, const int maxLevel=-1) const | public | 获取半径为r的圆域内的特征点编号列表 |
为什么要分配特征点呢?
我们将图片分割为 64*48 大小的栅格,并将关键点按照位置分配到相应栅格中。匹配时,按照先粗后精的思想,先搜索栅格,再在栅格内搜索对应的像素点,这样比逐一比较像素点,效率更高。
4.5 构造函数 Frame()
包括默认构造函数、拷贝构造函数、单目/双目/RGBD 模式构造函数。
4.6 Frame 类的用途
| 成员变量/函数 | 访问控制 | 意义 |
|---|---|---|
Frame mCurrentFrame | public | 当前正在处理的帧 |
Frame mLastFrame | private | 上一帧 |
Tracking 线程每收到一帧图像,就调用函数 Tracking::GrabImageMonocular()、Tracking::GrabImageStereo() 或 Tracking::GrabImageRGBD() 创建一个 Frame 对象,赋值给 mCurrentFrame。
Track() 函数跟踪结束后,将 mCurrentFrame 赋值给 mLastFrame。
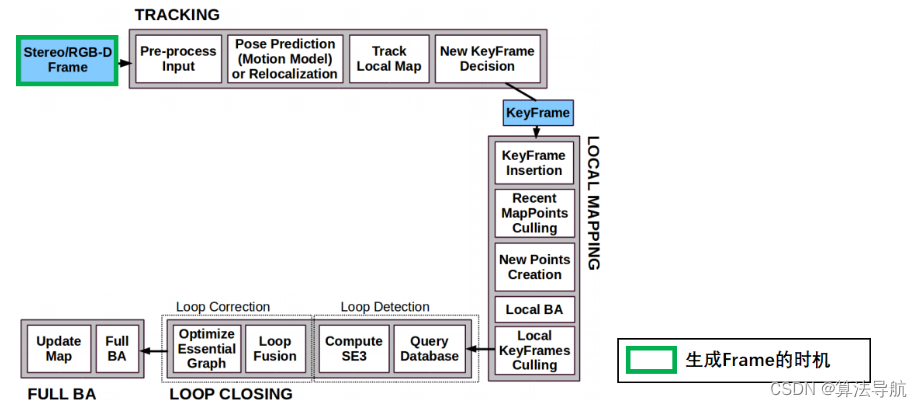
除了少数被选为 KeyFrame 的帧以外,大部分 Frame 对象的作用仅在于 Tracking 线程内追踪当前帧位姿,不会对 LocalMapping 线程和 LoopClosing 线程产生任何影响,在 mLastFrame 和 mCurrentFrame 更新之后就被系统销毁了。