《博主简介》
小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。
✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~
👍感谢小伙伴们点赞、关注!
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于YOLOv8深度学习的行人跌倒检测系统】 |
| 9.【基于YOLOv8深度学习的PCB板缺陷检测系统】 | 10.【基于YOLOv8深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于YOLOv8深度学习的安全帽目标检测系统】 | 12.【基于YOLOv8深度学习的120种犬类检测与识别系统】 |
| 13.【基于YOLOv8深度学习的路面坑洞检测系统】 | 14.【基于YOLOv8深度学习的火焰烟雾检测系统】 |
| 15.【基于YOLOv8深度学习的钢材表面缺陷检测系统】 | 16.【基于YOLOv8深度学习的舰船目标分类检测系统】 |
| 17.【基于YOLOv8深度学习的西红柿成熟度检测系统】 | 18.【基于YOLOv8深度学习的血细胞检测与计数系统】 |
| 19.【基于YOLOv8深度学习的吸烟/抽烟行为检测系统】 | 20.【基于YOLOv8深度学习的水稻害虫检测与识别系统】 |
| 21.【基于YOLOv8深度学习的高精度车辆行人检测与计数系统】 | 22.【基于YOLOv8深度学习的路面标志线检测与识别系统】 |
| 22.【基于YOLOv8深度学习的智能小麦害虫检测识别系统】 | 23.【基于YOLOv8深度学习的智能玉米害虫检测识别系统】 |
| 24.【基于YOLOv8深度学习的200种鸟类智能检测与识别系统】 | 25.【基于YOLOv8深度学习的45种交通标志智能检测与识别系统】 |
| 26.【基于YOLOv8深度学习的人脸面部表情识别系统】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
《------正文------》
实现效果

文章目录
- 实现效果
- 前言
- 1.第一步:车牌检测
- 1.1 yolov8环境配置
- 1.2 数据集准备与处理
- 1.3 目标检测模型训练
- 训练结果评估
- 4. 检测结果识别
- 第二步:车牌识别
- 环境配置
- 模型使用demo
- 加载ocr模型
- 获取车牌位置信息
- 抠出上述车牌位置,并显示
- 使用ocr进行车牌识别
- 将识别结果显示在图片上
- 完整代码
- 视频车牌识别
- 【免费获取方式】
点击跳转至文末《完整相关文件及源码》免费获取
前言
车牌识别在我们实际生活中十分常见,本文主要介绍一种基于YOLOv8目标检测与PaddleOcr进行车牌识别的实现方法。本文提供了完整的数据集和代码,完全免费,供小伙伴们学习参考。感兴趣的小伙伴们学习参考。
要进行车牌识别,主要分为两步。
第一步:进行车辆车牌位置的检测,本文是使用yolov8训练一个车牌检测模型来进行车牌检测,精度为0.99;
第二步:对第一步检测出的车牌进行识别,直接使用的是PaddleOCR对于车牌进行识别。
下面对这些内容进行详细介绍
1.第一步:车牌检测
本文主要基于yolov8训练了一个车牌检测模型,用于进行车牌位置的检测,主要步骤如下:
1.1 yolov8环境配置
pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple
yolov8源码地址:https://github.com/ultralytics/ultralytics
1.2 数据集准备与处理
本文训练模型使用的数据集为CPDD2020数据集。
数据集下载地址:https://github.com/detectRecog/CCPD
CCPD是一个大型的、多样化的、经过仔细标注的中国城市车牌开源数据集。CCPD数据集主要分为CCPD2019数据集和CCPD2020(CCPD-Green)数据集。CCPD2019数据集车牌类型仅有普通车牌(蓝色车牌),CCPD2020数据集车牌类型仅有新能源车牌(绿色车牌)。
在CCPD数据集中,每张图片仅包含一张车牌,车牌的车牌省份主要为皖。CCPD中的每幅图像都包含大量的标注信息,但是CCPD数据集没有专门的标注文件,每张图像的文件名就是该图像对应的数据标注。
标注最困难的部分是注释四个顶点的位置。为了完成这项任务,数据发布者首先在10k图像上手动标记四个顶点的位置。然后设计了一个基于深度学习的检测模型,在对该网络进行良好训练后,对每幅图像的四个顶点位置进行自动标注。最后,数据发布者雇用了7名兼职工人在两周内纠正这些标注。CCPD提供了超过250k个独特的车牌图像和详细的注释。每张图像的分辨率为720(宽度)× 1160(高)× 3(通道)。实际上,这种分辨率足以保证每张图像中的车牌清晰可辨,但是该数据有些图片标注可能不准。不过总的来说CCPD数据集非常推荐研究车牌识别算法的人员学习使用。
CPDD2020数据集一共包含11774张新能源汽车的车牌数据。部分图片如下:
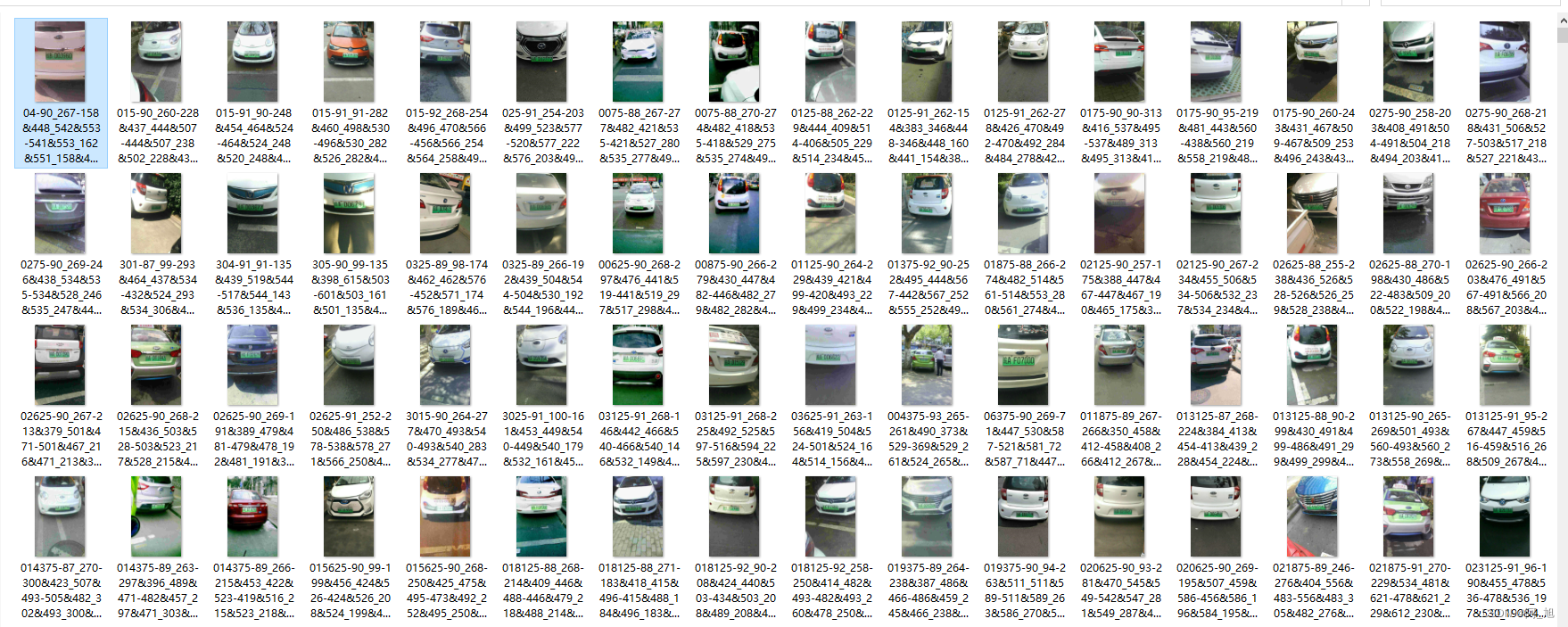
数据集中图片的命名规则如下:
图片命名:“025-95_113-154&383_386&473-386&473_177&454_154&383_363&402-0_0_22_27_27_33_16-37-15.jpg”
解释:
1. 025:车牌区域占整个画面的比例;
2. 95_113: 车牌水平和垂直角度, 水平95°, 竖直113°
3. 154&383_386&473:标注框左上、右下坐标,左上(154, 383), 右下(386, 473)
4. 86&473_177&454_154&383_363&402:标注框四个角点坐标,顺序为右下、左下、左上、右上
5. 0_0_22_27_27_33_16:车牌号码映射关系如下: 第一个0为省份 对应省份字典provinces中的’皖’,;第二个0是该车所在地的地市一级代码,对应地市一级代码字典alphabets的’A’;后5位为字母和文字, 查看车牌号ads字典,如22为Y,27为3,33为9,16为S,最终车牌号码为皖AY339S
省份:[“皖”, “沪”, “津”, “渝”, “冀”, “晋”, “蒙”, “辽”, “吉”, “黑”, “苏”, “浙”, “京”, “闽”, “赣”,
“鲁”, “豫”, “鄂”, “湘”, “粤”, “桂”, “琼”, “川”, “贵”, “云”, “藏”, “陕”, “甘”, “青”, “宁”,
“新”]
地市:[‘A’, ‘B’, ‘C’, ‘D’, ‘E’, ‘F’, ‘G’, ‘H’, ‘J’, ‘K’, ‘L’, ‘M’, ‘N’, ‘P’, ‘Q’,
‘R’, ‘S’, ‘T’, ‘U’, ‘V’, ‘W’,‘X’, ‘Y’, ‘Z’]
车牌字典:[‘A’, ‘B’, ‘C’, ‘D’, ‘E’, ‘F’, ‘G’, ‘H’, ‘J’, ‘K’, ‘L’, ‘M’, ‘N’, ‘P’,
‘Q’, ‘R’, ‘S’, ‘T’, ‘U’, ‘V’, ‘W’, ‘X’,‘Y’, ‘Z’, ‘0’, ‘1’, ‘2’, ‘3’, ‘4’, ‘5’,
‘6’, ‘7’, ‘8’, ‘9’]
制作车牌检测数据集:
这个数据集的检测和识别标签都在图片名中,可以直接通过上述图片的命名规则,从图片读取出来,再写入txt文件中即可。代码如下:
import shutil
import cv2
import os
def txt_translate(path, txt_path):
print(path)
print(txt_path)
for filename in os.listdir(path):
# print(filename)
list1 = filename.split("-", 3) # 第一次分割,以减号'-'做分割
subname = list1[2]
list2 = filename.split(".", 1)
subname1 = list2[1]
if subname1 == 'txt':
continue
lt, rb = subname.split("_", 1) # 第二次分割,以下划线'_'做分割
lx, ly = lt.split("&", 1)
rx, ry = rb.split("&", 1)
width = int(rx) - int(lx)
height = int(ry) - int(ly) # bounding box的宽和高
cx = float(lx) + width / 2
cy = float(ly) + height / 2 # bounding box中心点
img = cv2.imread(path + filename)
if img is None: # 自动删除失效图片(下载过程有的图片会存在无法读取的情况)
print(path + filename)
os.remove(path + filename)
continue
width = width / img.shape[1]
height = height / img.shape[0]
cx = cx / img.shape[1]
cy = cy / img.shape[0]
txtname = filename.split(".", 1)
txtfile = txt_path + txtname[0] + ".txt"
# 绿牌是第0类,蓝牌是第1类
with open(txtfile, "w") as f:
f.write(str(0) + " " + str(cx) + " " + str(cy) + " " + str(width) + " " + str(height))
if __name__ == '__main__':
# det图片存储地址
trainDir = r"G:/datasets/CarPlateData/CCPD2020/ccpd_green/train/"
validDir = r"G:/datasets/CarPlateData/CCPD2020/ccpd_green/val/"
testDir = r"G:/datasets/CarPlateData/CCPD2020/ccpd_green/test/"
# det txt存储地址
train_txt_path = r"G:/datasets/CarPlateData/CCPD2020/ccpd_green/train_labels/"
val_txt_path = r"G:/datasets/CarPlateData/CCPD2020/ccpd_green/val_labels/"
test_txt_path = r"G:/datasets/CarPlateData/CCPD2020/ccpd_green/test_labels/"
txt_translate(trainDir, train_txt_path)
txt_translate(validDir, val_txt_path)
txt_translate(testDir, test_txt_path)
制作完成后,如上图所示。
1.3 目标检测模型训练
图片数据集的存放格式如下,在项目目录中新建datasets目录,同时将分类的图片分为训练集、验证集与测试集放入PlateData目录下。
数据准备完成后,通过调用train.py文件进行模型训练,epochs参数用于调整训练的轮数,batch参数用于调整训练的批次大小【根据内存大小调整,最小为1】,代码如下:
#coding:utf-8
from ultralytics import YOLO
# 加载预训练模型
model = YOLO("yolov8n.pt")
# Use the model
if __name__ == '__main__':
# Use the model
results = model.train(data='datasets/PlateData/data.yaml', epochs=300, batch=4) # 训练模型
# 将模型转为onnx格式
# success = model.export(format='onnx')
训练结果评估
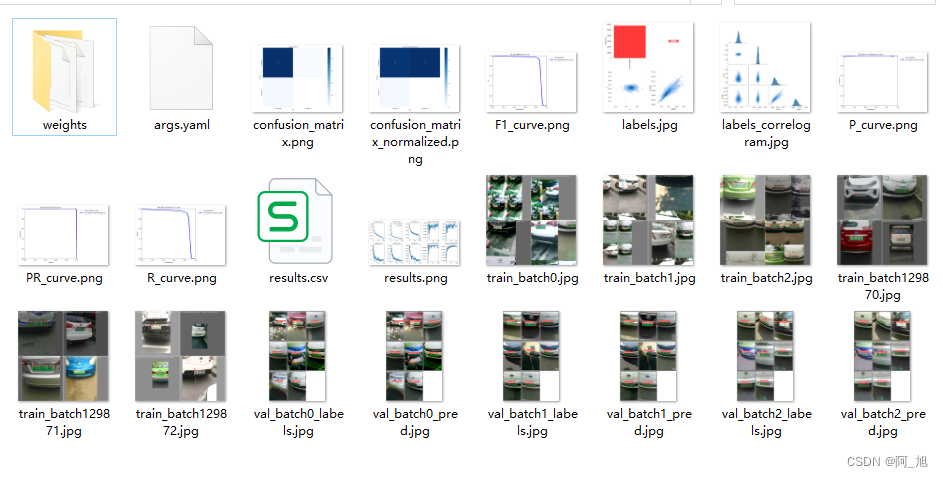
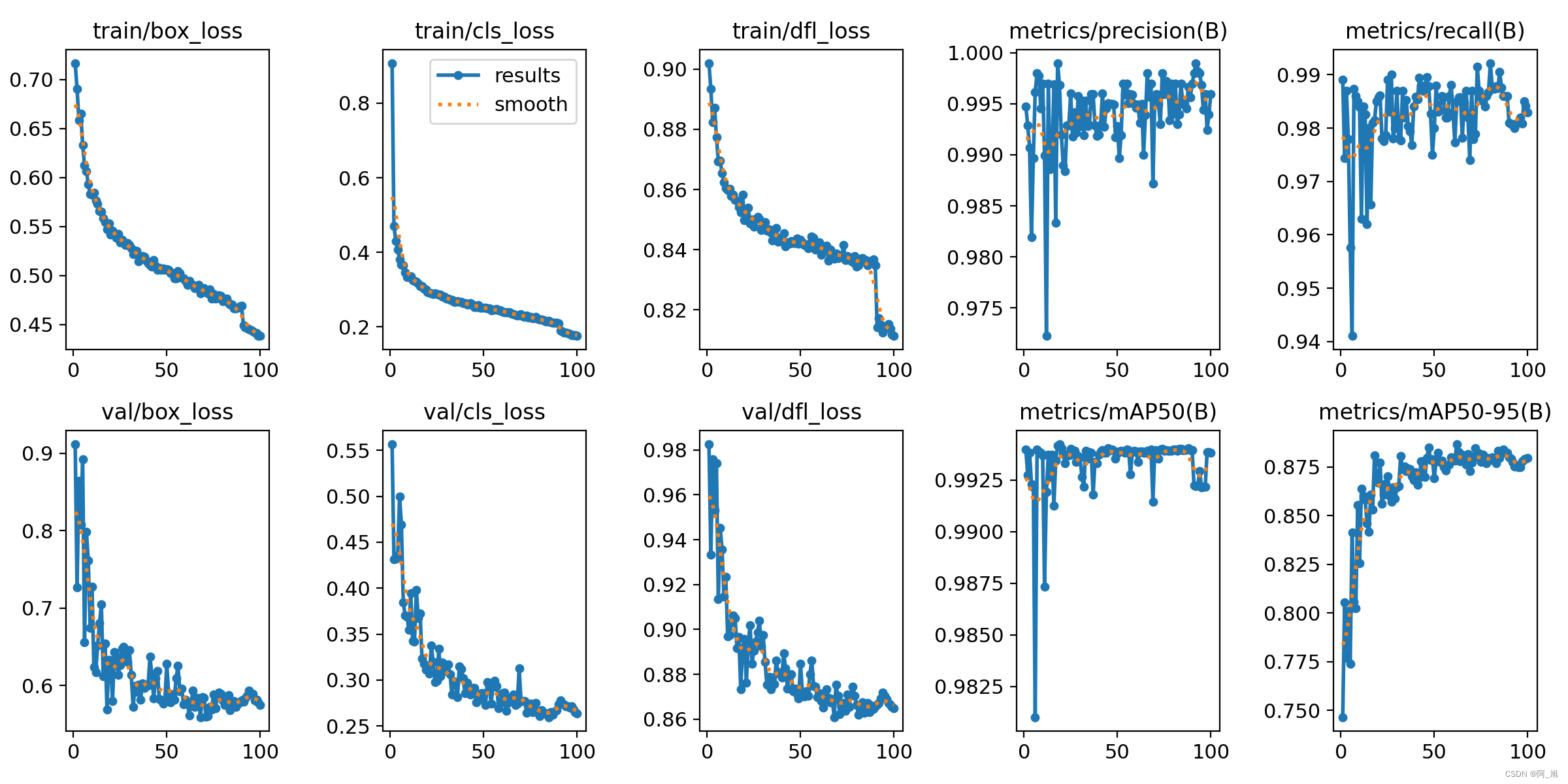
在深度学习中,我们通常用损失函数下降的曲线来观察模型训练的情况。YOLOv8在训练时主要包含三个方面的损失:定位损失(box_loss)、分类损失(cls_loss)和动态特征损失(dfl_loss),在训练结束后,可以在runs/目录下找到训练过程及结果文件,如下所示:
各损失函数作用说明:
定位损失box_loss:预测框与标定框之间的误差(GIoU),越小定位得越准;
分类损失cls_loss:计算锚框与对应的标定分类是否正确,越小分类得越准;
动态特征损失(dfl_loss):DFLLoss是一种用于回归预测框与目标框之间距离的损失函数。在计算损失时,目标框需要缩放到特征图尺度,即除以相应的stride,并与预测的边界框计算Ciou Loss,同时与预测的anchors中心点到各边的距离计算回归DFLLoss。这个过程是YOLOv8训练流程中的一部分,通过计算DFLLoss可以更准确地调整预测框的位置,提高目标检测的准确性。
本文训练结果如下:
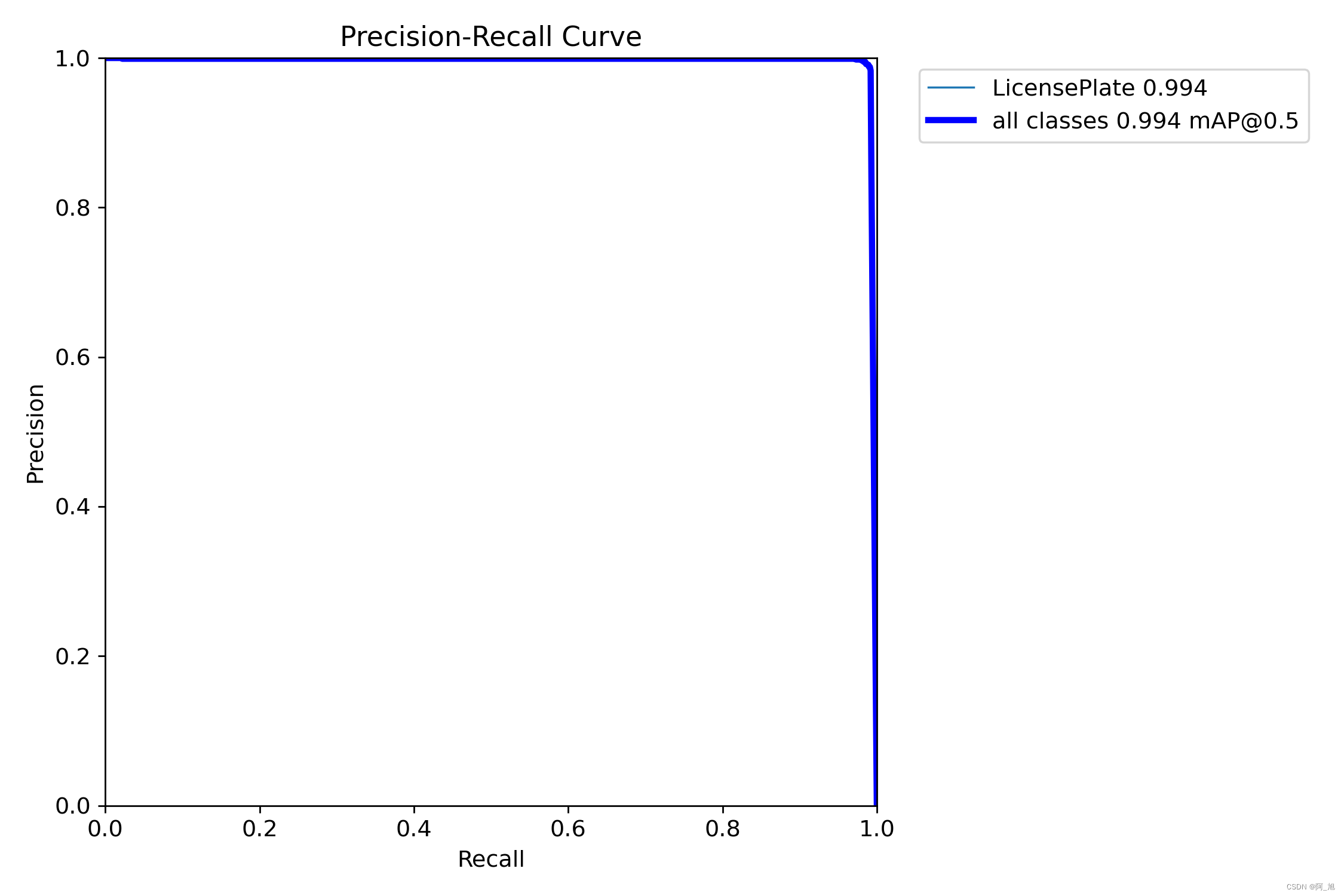
我们通常用PR曲线来体现精确率和召回率的关系,本文训练结果的PR曲线如下。mAP表示Precision和Recall作为两轴作图后围成的面积,m表示平均,@后面的数表示判定iou为正负样本的阈值。mAP@.5:表示阈值大于0.5的平均mAP,可以看到本文模型目标检测的mAP@0.5平均值为0.994,结果相当不错。
4. 检测结果识别
模型训练完成后,我们可以得到一个最佳的训练结果模型best.pt文件,在runs/trian/weights目录下。我们可以使用该文件进行后续的推理检测。
图片检测代码如下:
#coding:utf-8
from ultralytics import YOLO
import cv2
# 所需加载的模型目录
path = 'models/best.pt'
# 需要检测的图片地址
img_path = "TestFiles/013671875-93_102-226&489_426&558-426&558_234&546_226&489_417&494-0_0_5_25_33_24_24_33-86-80.jpg"
# 加载预训练模型
# conf 0.25 object confidence threshold for detection
# iou 0.7 intersection over union (IoU) threshold for NMS
model = YOLO(path, task='detect')
# model = YOLO(path, task='detect',conf=0.5)
# 检测图片
results = model(img_path)
res = results[0].plot()
# res = cv2.resize(res,dsize=None,fx=0.3,fy=0.3,interpolation=cv2.INTER_LINEAR)
cv2.imshow("YOLOv8 Detection", res)
cv2.waitKey(0)
执行上述代码后,会将执行的结果直接标注在图片上,结果如下:
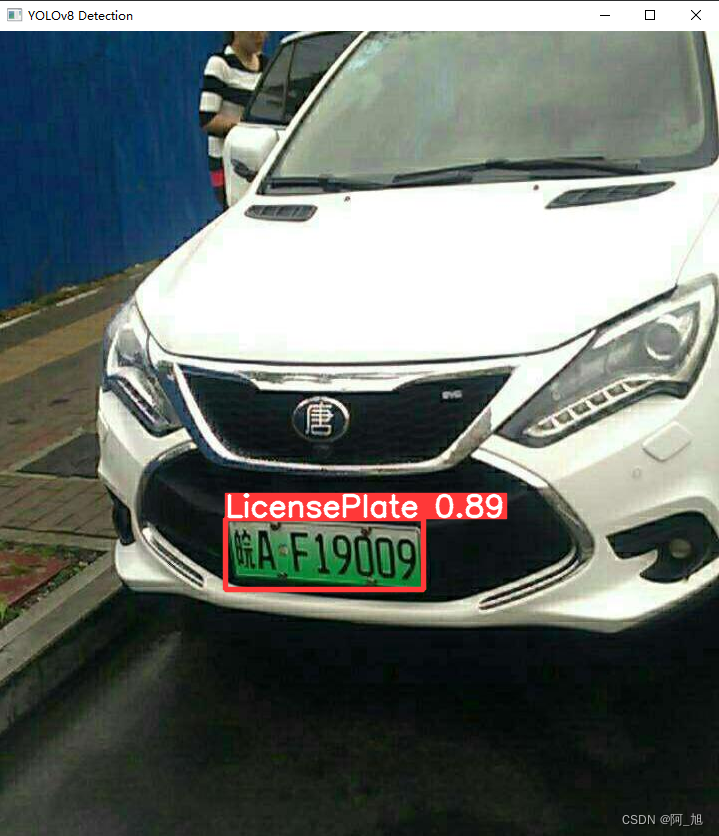
可以发现,该模型能够很好的检测出车牌区域。下面我们需要对检测出的车牌进行识别。
第二步:车牌识别
本文的车牌识别直接使用的是开源的PaddleOCR检测模型。地址:https://github.com/PaddlePaddle/PaddleOCR
环境配置
pip install paddlepaddle2.5.2 -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install paddleocr2.7.0.3 -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install shapely -i https://pypi.tuna.tsinghua.edu.cn/simple
模型使用demo

from paddleocr import PaddleOCR, draw_ocr
# Paddleocr目前支持的多语言语种可以通过修改lang参数进行切换
# 例如`ch`, `en`, `fr`, `german`, `korean`, `japan`
cls_model_dir='paddleModels/whl/cls/ch_ppocr_mobile_v2.0_cls_infer'
rec_model_dir='paddleModels/whl/rec/ch/ch_PP-OCRv4_rec_infer'
ocr = PaddleOCR(use_angle_cls=True, lang="ch", det=False,cls_model_dir=cls_model_dir,rec_model_dir=rec_model_dir) # need to run only once to download and load model into memory
img_path = '22.png'
result = ocr.ocr(img_path, cls=True)
license_name, conf = result[0][0][1]
if '·' in license_name:
license_name = license_name.replace('·', '')
print(license_name,conf)

加载ocr模型
# 加载ocr模型
cls_model_dir = 'paddleModels/whl/cls/ch_ppocr_mobile_v2.0_cls_infer'
rec_model_dir = 'paddleModels/whl/rec/ch/ch_PP-OCRv4_rec_infer'
ocr = PaddleOCR(use_angle_cls=False, lang="ch", det=False, cls_model_dir=cls_model_dir,rec_model_dir=rec_model_dir)
获取车牌位置信息
# 所需加载的模型目录
path = 'models/best.pt'
# 加载预训练模型
# conf 0.25 object confidence threshold for detection
# iou 0.7 int.ersection over union (IoU) threshold for NMS
model = YOLO(path, task='detect')
# model = YOLO(path, task='detect',conf=0.5)
# 检测图片
results = model(img_path)[0]
# 车牌区域信息
location_list = results.boxes.xyxy.tolist()
抠出上述车牌位置,并显示
if len(location_list) >= 1:
location_list = [list(map(int, e)) for e in location_list]
# 截取每个车牌区域的照片
license_imgs = []
for each in location_list:
x1, y1, x2, y2 = each
cropImg = now_img[y1:y2, x1:x2]
license_imgs.append(cropImg)
cv2.imshow('111',cropImg)
cv2.waitKey(0)

使用ocr进行车牌识别
def get_license_result(ocr,image):
"""
image:输入的车牌截取照片
输出,车牌号与置信度
"""
result = ocr.ocr(image, cls=True)[0]
if result:
license_name, conf = result[0][1]
if '·' in license_name:
license_name = license_name.replace('·', '')
return license_name, conf
else:
return None, None
# 车牌识别结果
lisence_res = []
conf_list = []
for each in license_imgs:
license_num, conf = get_license_result(ocr, each)
if license_num:
lisence_res.append(license_num)
conf_list.append(conf)
else:
lisence_res.append('无法识别')
conf_list.append(0)
将识别结果显示在图片上
for text, box in zip(lisence_res, location_list):
now_img = tools.drawRectBox(now_img, box, text, fontC)
完整代码
#coding:utf-8
from ultralytics import YOLO
import cv2
import detect_tools as tools
from PIL import ImageFont
from paddleocr import PaddleOCR
def get_license_result(ocr,image):
"""
image:输入的车牌截取照片
输出,车牌号与置信度
"""
result = ocr.ocr(image, cls=True)[0]
if result:
license_name, conf = result[0][1]
if '·' in license_name:
license_name = license_name.replace('·', '')
return license_name, conf
else:
return None, None
# 需要检测的图片地址
img_path = "TestFiles/013671875-93_102-226&489_426&558-426&558_234&546_226&489_417&494-0_0_5_25_33_24_24_33-86-80.jpg"
now_img = tools.img_cvread(img_path)
fontC = ImageFont.truetype("Font/platech.ttf", 50, 0)
# 加载ocr模型
cls_model_dir = 'paddleModels/whl/cls/ch_ppocr_mobile_v2.0_cls_infer'
rec_model_dir = 'paddleModels/whl/rec/ch/ch_PP-OCRv4_rec_infer'
ocr = PaddleOCR(use_angle_cls=False, lang="ch", det=False, cls_model_dir=cls_model_dir,rec_model_dir=rec_model_dir)
# 所需加载的模型目录
path = 'models/best.pt'
# 加载预训练模型
# conf 0.25 object confidence threshold for detection
# iou 0.7 int.ersection over union (IoU) threshold for NMS
model = YOLO(path, task='detect')
# model = YOLO(path, task='detect',conf=0.5)
# 检测图片
results = model(img_path)[0]
location_list = results.boxes.xyxy.tolist()
if len(location_list) >= 1:
location_list = [list(map(int, e)) for e in location_list]
# 截取每个车牌区域的照片
license_imgs = []
for each in location_list:
x1, y1, x2, y2 = each
cropImg = now_img[y1:y2, x1:x2]
license_imgs.append(cropImg)
cv2.imshow('111',cropImg)
cv2.waitKey(0)
# 车牌识别结果
lisence_res = []
conf_list = []
for each in license_imgs:
license_num, conf = get_license_result(ocr, each)
if license_num:
lisence_res.append(license_num)
conf_list.append(conf)
else:
lisence_res.append('无法识别')
conf_list.append(0)
for text, box in zip(lisence_res, location_list):
now_img = tools.drawRectBox(now_img, box, text, fontC)
now_img = cv2.resize(now_img,dsize=None,fx=0.5,fy=0.5,interpolation=cv2.INTER_LINEAR)
cv2.imshow("YOLOv8 Detection", now_img)
cv2.waitKey(0)

视频车牌识别
#coding:utf-8
import cv2
from ultralytics import YOLO
import detect_tools as tools
from PIL import ImageFont
from paddleocr import PaddleOCR
def get_license_result(ocr,image):
"""
image:输入的车牌截取照片
输出,车牌号与置信度
"""
result = ocr.ocr(image, cls=True)[0]
if result:
license_name, conf = result[0][1]
if '·' in license_name:
license_name = license_name.replace('·', '')
return license_name, conf
else:
return None, None
fontC = ImageFont.truetype("Font/platech.ttf", 50, 0)
# 加载ocr模型
cls_model_dir = 'paddleModels/whl/cls/ch_ppocr_mobile_v2.0_cls_infer'
rec_model_dir = 'paddleModels/whl/rec/ch/ch_PP-OCRv4_rec_infer'
ocr = PaddleOCR(use_angle_cls=False, lang="ch", det=False, cls_model_dir=cls_model_dir,rec_model_dir=rec_model_dir)
# 所需加载的模型目录
path = 'models/best.pt'
# 加载预训练模型
# conf 0.25 object confidence threshold for detection
# iou 0.7 intersection over union (IoU) threshold for NMS
model = YOLO(path, task='detect')
# 需要检测的图片地址
video_path = "TestFiles/1.mp4"
cap = cv2.VideoCapture(video_path)
# Loop through the video frames
while cap.isOpened():
# Read a frame from the video
success, frame = cap.read()
if success:
# Run YOLOv8 inference on the frame
results = model(frame)[0]
location_list = results.boxes.xyxy.tolist()
if len(location_list) >= 1:
location_list = [list(map(int, e)) for e in location_list]
# 截取每个车牌区域的照片
license_imgs = []
for each in location_list:
x1, y1, x2, y2 = each
cropImg = frame[y1:y2, x1:x2]
license_imgs.append(cropImg)
# 车牌识别结果
lisence_res = []
conf_list = []
for each in license_imgs:
license_num, conf = get_license_result(ocr, each)
if license_num:
lisence_res.append(license_num)
conf_list.append(conf)
else:
lisence_res.append('无法识别')
conf_list.append(0)
for text, box in zip(lisence_res, location_list):
frame = tools.drawRectBox(frame, box, text, fontC)
frame = cv2.resize(frame, dsize=None, fx=0.5, fy=0.5, interpolation=cv2.INTER_LINEAR)
cv2.imshow("YOLOv8 Detection", frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) & 0xFF == ord("q"):
break
else:
# Break the loop if the end of the video is reached
break
# Release the video capture object and close the display window
cap.release()
cv2.destroyAllWindows()
以上便是关于车牌检测与识别的原理与代码介绍。感兴趣的小伙伴可以自行尝试。
【免费获取方式】
关注下方名片G-Z-H:【阿旭算法与机器学习】,回复【开源】即可获取下载方式
本文涉及到的完整全部程序文件:包括python源码、数据集、训练代码、测试图片视频等(见下图),获取方式见文末:
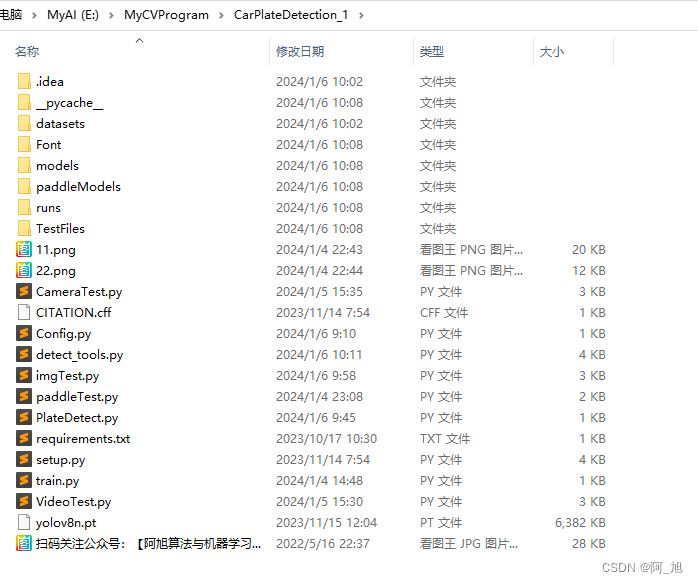
关注下方名片GZH:【阿旭算法与机器学习】,回复【开源】即可获取下载方式
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!
觉得不错的小伙伴,感谢点赞、关注加收藏哦!