目录
- 一、损失函数是什么
- 二、常见的损失函数
- 2.1 nn.CrossEntropyLoss交叉熵损失函数
- 2.1.1 交叉熵的概念
- 2.2.2 交叉熵代码实现
- 2.2.3 加权重损失
- 2.2 nn.NLLLoss
- 2.2.1 代码实现
- 2.3 nn.BCELoss
- 2.3.1 代码实现
- 2.4 nn.BCEWithLogitsLoss
- 2.4.1 代码实现
- 三、优化器Optimizer
- 3.1 什么是优化器
- 3.1.1梯度的概念
- 3.2 optimizer的属性
- 3.3 optimizer的方法
- 3.3.1 zero_grad()
- 3.3.2 step()
- 3.3.3 add_param_group()
- 3.3.4 state_dict()
- 3.3.5 load_state_dict()
- 3.3 梯度下降
- 3.4 学习率
- 3.5 多尺度学习率实验
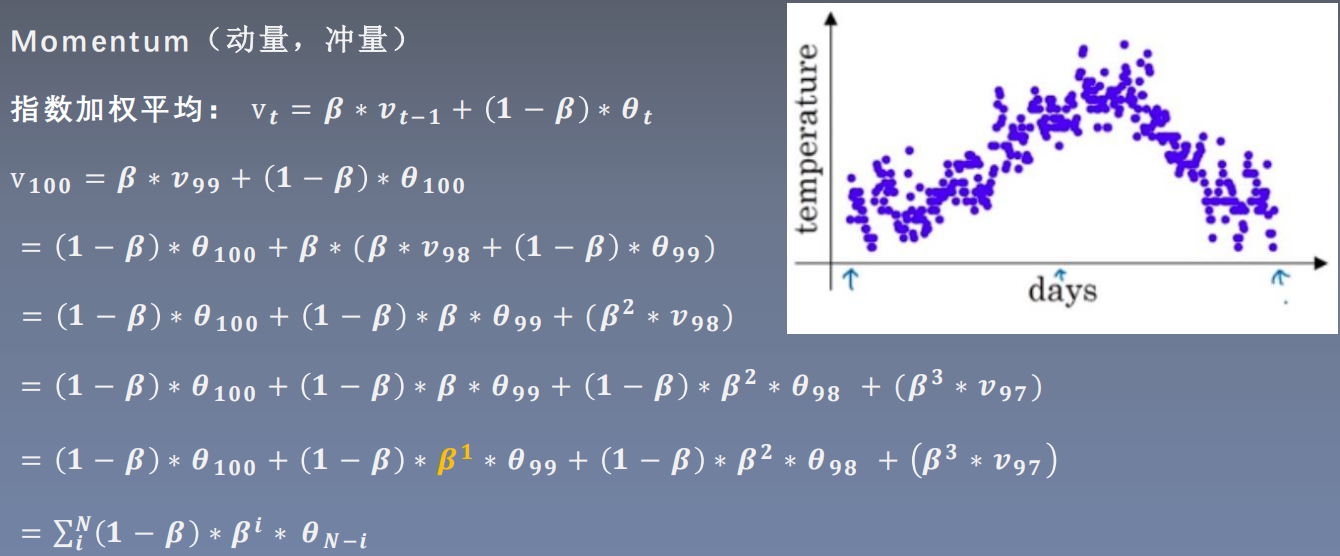
- 3.6 momentum动量
- 3.6.1 指数加权平均
- 3.6.2 加Momentum更新公式
- 3.6.3 momentum实验
- 4.SGD优化器
- 四、常见的其他优化器
一、损失函数是什么
从下面的一元函数可以看出,直线拟合的点和真实值之间存在误差,这个误差就是损失函数。
损失函数:计算一个样本的差异。
代价函数:样本数据集所有损失的平均值。
目标函数:代价函数+Regularization(对模型的约束)
Regularization:为了防止模型过拟合,需要添加该项对模型进行约束
一般用代价函数来表示模型的损失函数


二、常见的损失函数
2.1 nn.CrossEntropyLoss交叉熵损失函数
功能: nn.LogSoftmax() 与 nn.NLLLoss() 结合,进行交叉熵计算
LogSoftmax:将数据归一化到一个概率取值的范围 0~1
NLLLoss():使用概率值计算交叉熵
主要参数:
• weight:各类别的loss设置权值
• ignore_index:忽略某个类别
• reduction :计算模式,可为none/sum /mean
none- 逐个元素计算
sum- 所有元素求和,返回标量
mean- 加权平均,返回标量

交叉熵损失函数继承的父类损失:
class _Loss(Module):
reduction: str
def __init__(self, size_average=None, reduce=None, reduction: str = 'mean') -> None:
super().__init__()
if size_average is not None or reduce is not None:
self.reduction: str = _Reduction.legacy_get_string(size_average, reduce)
else:
self.reduction = reduction
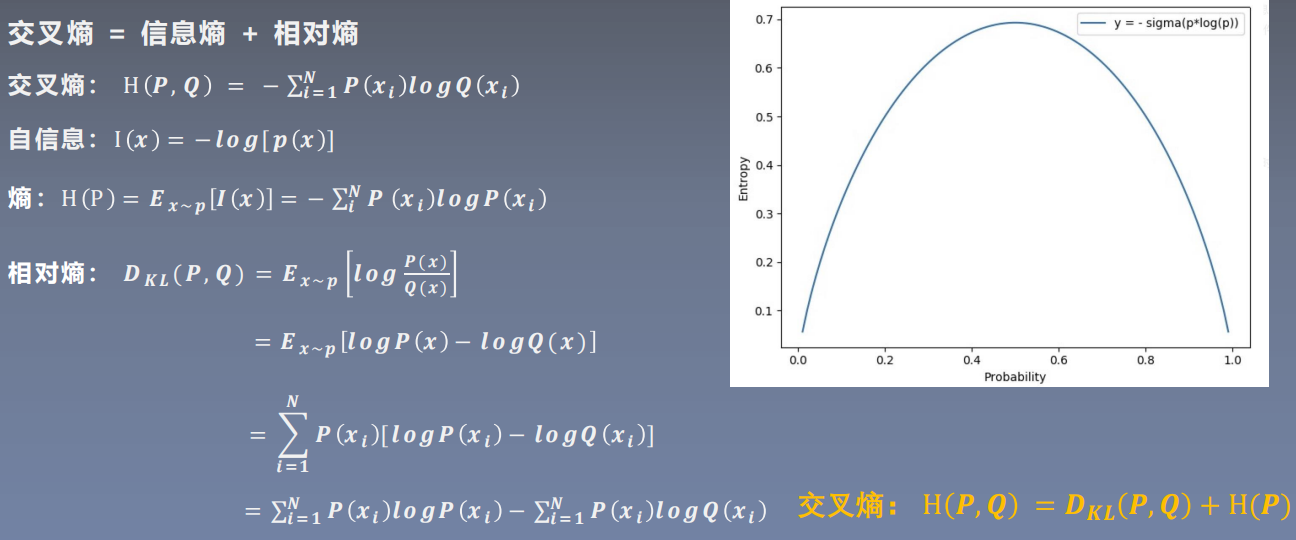
2.1.1 交叉熵的概念
熵:表示自信息的期望
自信息:用于衡量单个事件的不确定性
右图表示信息熵:当概率为0.5左右的时候,信息熵最大。
P表示原始数据的概率分布,Q表示模型输出的概率分布。
从公式可以看出优化交叉熵也就是优化相对熵,因为H§是一个常数。
2.2.2 交叉熵代码实现
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
# fake data
inputs = torch.tensor([[1, 2], [1, 3], [1, 3]], dtype=torch.float) # 设置输入数据,两个神经元
target = torch.tensor([0, 1, 1], dtype=torch.long) # 三个类别,第一个样本类别为0,第2,3个样本类别为1
# ----------------------------------- CrossEntropy loss: reduction -----------------------------------
# flag = 0
flag = 1
if flag:
# def loss function
loss_f_none = nn.CrossEntropyLoss(weight=None, reduction='none')
loss_f_sum = nn.CrossEntropyLoss(weight=None, reduction='sum') # 将所有损失相加
loss_f_mean = nn.CrossEntropyLoss(weight=None, reduction='mean') # 求损失的平均值
# forward
loss_none = loss_f_none(inputs, target)
loss_sum = loss_f_sum(inputs, target)
loss_mean = loss_f_mean(inputs, target)
# view
print("Cross Entropy Loss:\n ", loss_none, loss_sum, loss_mean)
# --------------------------------- 手算公式验证 只计算第一个样本的损失----------------------------------------
# flag = 0
flag = 1
if flag:
idx = 0 # 第一个样本
input_1 = inputs.detach().numpy()[idx] # 取第一个样本数据 [1, 2]
target_1 = target.numpy()[idx] # 取第一个样本的标签类别 [0]
# 第一项
x_class = input_1[target_1]
# 第二项
sigma_exp_x = np.sum(list(map(np.exp, input_1)))
log_sigma_exp_x = np.log(sigma_exp_x)
# 输出loss
loss_1 = -x_class + log_sigma_exp_x
print("第一个样本loss为: ", loss_1)
输出结果:
使用交叉熵损失计算和手动设计公式计算得到的结果相同。

2.2.3 加权重损失
代码实现:
设计第一个样本的权重为1,后两个样本的权重为2
# ----------------------------------- weight -----------------------------------
# flag = 0
flag = 1
if flag:
# def loss function
weights = torch.tensor([1, 2], dtype=torch.float)
# weights = torch.tensor([0.7, 0.3], dtype=torch.float)
loss_f_none_w = nn.CrossEntropyLoss(weight=weights, reduction='none')
loss_f_sum = nn.CrossEntropyLoss(weight=weights, reduction='sum')
loss_f_mean = nn.CrossEntropyLoss(weight=weights, reduction='mean')
# forward
loss_none_w = loss_f_none_w(inputs, target)
loss_sum = loss_f_sum(inputs, target)
loss_mean = loss_f_mean(inputs, target)
# view
print("\nweights: ", weights)
print(loss_none_w, loss_sum, loss_mean)
输出结果:
注意:在计算平均损失的时候,不再是总损失/3个样本,而是做了一个加权的求平均,第一个样本的权值是1,那就算1个样本,第2,3个样本的权值为2,所以算4个样本,损失的平均值为1.821/5=0.3642。

2.2 nn.NLLLoss
功能:实现负对数似然函数中的负号功能
主要参数:
• weight:各类别的loss设置权值
• ignore_index:忽略某个类别
• reduction:计算模式,可为none/sum/mean
none-逐个元素计算
sum-所有元素求和,返回标量
mean-加权平均,返回标量

2.2.1 代码实现
flag = 1
if flag:
weights = torch.tensor([1, 1], dtype=torch.float)
loss_f_none_w = nn.NLLLoss(weight=weights, reduction='none')
loss_f_sum = nn.NLLLoss(weight=weights, reduction='sum')
loss_f_mean = nn.NLLLoss(weight=weights, reduction='mean')
# forward
loss_none_w = loss_f_none_w(inputs, target)
loss_sum = loss_f_sum(inputs, target)
loss_mean = loss_f_mean(inputs, target)
# view
print("\nweights: ", weights)
print("NLL Loss", loss_none_w, loss_sum, loss_mean)
输出结果:
该函数只是对输出结果进行添加符号处理

2.3 nn.BCELoss
功能:二分类交叉熵,对每一个神经元一一计算loss
注意事项:输入值取值在[0,1]
主要参数:
• weight:各类别的loss设置权值
• ignore_index:忽略某个类别
• reduction :计算模式,可为none/sum/mean
none-逐个元素计算
sum-所有元素求和,返回标量
mean-加权平均,返回标量

2.3.1 代码实现
注意:使用该函数,如果输入的值不是0~1之间的数据,需要添加sigmoid函数。
flag = 1
if flag:
inputs = torch.tensor([[1, 2], [2, 2], [3, 4], [4, 5]], dtype=torch.float)
target = torch.tensor([[1, 0], [1, 0], [0, 1], [0, 1]], dtype=torch.float)
target_bce = target
# 使用该函数一定要注意,将输出值压缩到0~1之间,使用sigmoid将输入值压缩到0~1之间
inputs = torch.sigmoid(inputs)
weights = torch.tensor([1, 1], dtype=torch.float)
loss_f_none_w = nn.BCELoss(weight=weights, reduction='none')
loss_f_sum = nn.BCELoss(weight=weights, reduction='sum')
loss_f_mean = nn.BCELoss(weight=weights, reduction='mean')
# forward
loss_none_w = loss_f_none_w(inputs, target_bce)
loss_sum = loss_f_sum(inputs, target_bce)
loss_mean = loss_f_mean(inputs, target_bce)
# view
print("\nweights: ", weights)
print("BCE Loss", loss_none_w, loss_sum, loss_mean)
输出结果:
对每一个神经元计算loss

2.4 nn.BCEWithLogitsLoss
功能:结合Sigmoid与二分类交叉熵
注意事项:使用该函数,网络最后不加sigmoid函数
主要参数:
• pos _weight :正样本的权值
• weight:各类别的loss设置权值
• ignore_index:忽略某个类别
• reduction :计算模式,可为none/sum/mean
none-逐个元素计算
sum-所有元素求和,返回标量
mean-加权平均,返回标量

2.4.1 代码实现
# ----------------------------------- 4 BCE with Logis Loss -----------------------------------
# flag = 0
flag = 1
if flag:
inputs = torch.tensor([[1, 2], [2, 2], [3, 4], [4, 5]], dtype=torch.float)
target = torch.tensor([[1, 0], [1, 0], [0, 1], [0, 1]], dtype=torch.float)
target_bce = target
# inputs = torch.sigmoid(inputs)
weights = torch.tensor([1, 1], dtype=torch.float)
loss_f_none_w = nn.BCEWithLogitsLoss(weight=weights, reduction='none')
loss_f_sum = nn.BCEWithLogitsLoss(weight=weights, reduction='sum')
loss_f_mean = nn.BCEWithLogitsLoss(weight=weights, reduction='mean')
# forward
loss_none_w = loss_f_none_w(inputs, target_bce)
loss_sum = loss_f_sum(inputs, target_bce)
loss_mean = loss_f_mean(inputs, target_bce)
# view
print("\nweights: ", weights)
print(loss_none_w, loss_sum, loss_mean)
输出结果:

如果再使用sigmoid函数会导致损失函数发生变化,如下:

三、优化器Optimizer
3.1 什么是优化器
机器学习模型训练有以下几个步骤,优化器是在哪一步开始使用呢?
将数据输入到模型当中会得到一个output值,将output值和target目标值放入到损失函数计算损失,损失使用反向传播的方法求出训练过程中每一个参数的梯度,优化器拿到梯度,使用优化策略,减少损失。

3.1.1梯度的概念
pytorch的优化器:管理并更新模型中可学习参数的值,使得模型输出更接近真实标签
导数:函数在指定坐标轴上的变化率
方向导数:指定方向上的变化率
梯度:一个向量,方向为方向导数取得最大值的方向
梯度下降:朝着梯度的负方向取变化,也就是变化最快的


3.2 optimizer的属性
 基本属性
基本属性
• defaults:优化器超参数。
• state:参数的缓存,如momentum的缓存(前几次更新的梯度)。
• params_groups:管理的参数组,list类型中存储的字典类型。
• _step_count:记录更新次数,学习率调整中使用。
3.3 optimizer的方法
3.3.1 zero_grad()
作用:清空所管理参数的梯度。
为什么使用该方法,这是因为pytorch特性:张量梯度不自动清零;

代码实现:
flag = 1
if flag:
print("weight before step:{}".format(weight.data))
optimizer.step() # 修改lr=1 0.1观察结果
print("weight after step:{}".format(weight.data))
print(
"weight in optimizer:{}\nweight in weight:{}\n".format(id(optimizer.param_groups[0]['params'][0]), id(weight)))
# 优化器当中存储的是参数变量的地址
print("weight.grad is {}\n".format(weight.grad))
optimizer.zero_grad()
print("after optimizer.zero_grad(), weight.grad is\n{}".format(weight.grad))
输出结果:
通过输出可以看出优化器当中存储的是参数变量的地址,不需要额外使用内存保存梯度;

3.3.2 step()
作用:执行一步更新

代码实现:
import os
BASE_DIR = os.path.dirname(os.path.abspath(__file__))
import torch
import torch.optim as optim
from common_tools import set_seed
set_seed(1) # 设置随机种子
weight = torch.randn((2, 2), requires_grad=True)
weight.grad = torch.ones((2, 2)) # 手动设置梯度为1
optimizer = optim.SGD([weight], lr=1)
# optimizer = optim.SGD([weight], lr=0.1)
# ----------------------------------- step -----------------------------------
# flag = 0
flag = 1
if flag:
print("weight before step:{}".format(weight.data))
optimizer.step() # 梯度下降方法 观察结果 输入-梯度=输出
print("weight after step:{}".format(weight.data))
结果输出:
当我们设置梯度为1,学习率为1的时候,输出结果=输入数据-梯度;

当我们设置梯度为1,学习率为0.1的时候,输出结果=输入数据-梯度;

3.3.3 add_param_group()
作用:添加参数组
对于不同的组有不同的超参数设置,例如一个深度学习模型,我们对特征提取模块的学习率设置小一些,让它更新慢一点,在全连接层可以设置学习率大一些。

代码实现:
flag = 1
if flag:
print("optimizer.param_groups is\n{}".format(optimizer.param_groups))
w2 = torch.randn((3, 3), requires_grad=True)
optimizer.add_param_group({"params": w2, 'lr': 0.0001})
print("optimizer.param_groups is\n{}".format(optimizer.param_groups))
输出结果:
将一个新的参数组

3.3.4 state_dict()
作用:获取优化器当前状态信息字典
当我们训练需要中断的时候可以使用该方法,将当前训练的参数保存下来。

代码实现:
flag = 1
if flag:
optimizer = optim.SGD([weight], lr=0.1, momentum=0.9)
opt_state_dict = optimizer.state_dict()
print("state_dict before step:\n", opt_state_dict)
for i in range(10):
optimizer.step() # 更新参数
print("state_dict after step:\n", optimizer.state_dict())
torch.save(optimizer.state_dict(), os.path.join(BASE_DIR, "optimizer_state_dict.pkl")) # 将当前state_dict保存成为序列化信息
输出结果:
将10次step的结果保存在optimizer_state_dict.pkl当中,同时会在当前文件夹生成一个新的文件。


3.3.5 load_state_dict()
作用:加载状态信息字典
用于读取上一次训练所保存的参数;

代码实现:
flag = 1
if flag:
optimizer = optim.SGD([weight], lr=0.1, momentum=0.9)
state_dict = torch.load(os.path.join(BASE_DIR, "optimizer_state_dict.pkl"))#首先加载进来训练参数
print("state_dict before load state:\n", optimizer.state_dict())
optimizer.load_state_dict(state_dict) #将训练参数添加到优化器当中
print("state_dict after load state:\n", optimizer.state_dict())
输出结果:

3.3 梯度下降
对y=4
x
2
x^2
x2使用梯度下降的方法更新参数,使其到达最低点,发现在计算到第三次的时候,y的值变的很大,并没有减少参数,反而变的更大。

代码实现:
import torch
import numpy as np
import matplotlib.pyplot as plt
torch.manual_seed(1)
def func(x_t):
"""
y = (2x)^2 = 4*x^2 dy/dx = 8x
"""
return torch.pow(2 * x_t, 2) # 求平方
# init
x = torch.tensor([2.], requires_grad=True)
# ------------------------------ 绘制函数基本曲线图 ------------------------------
flag = 0
# flag = 1
if flag:
x_t = torch.linspace(-3, 3, 100)
y = func(x_t)
plt.plot(x_t.numpy(), y.numpy(), label="y = 4*x^2")
plt.grid()
plt.xlabel("x")
plt.ylabel("y")
plt.legend()
plt.show()
# 横轴设为参数x,纵轴设置为y
# ------------------------------ gradient descent ------------------------------
# flag = 0
flag = 1
if flag:
iter_rec, loss_rec, x_rec = list(), list(), list() # 记录迭代次数和损失
lr = 1 # 学习率/1. /.5 /.2 /.1 /.125
max_iteration = 4 # 设置最大迭代次数
for i in range(max_iteration):
y = func(x)
y.backward() # 求取x的梯度
print("Iter:{}, X:{:8}, X.grad:{:8}, loss:{:10}".format(
i, x.detach().numpy()[0], x.grad.detach().numpy()[0], y.item()))
x_rec.append(x.item())
x.data.sub_(lr * x.grad) # x -= x.grad 数学表达式意义: x = x - x.grad # 0.5 0.2 0.1 0.125
x.grad.zero_()
iter_rec.append(i)
loss_rec.append(y.item())
# plt.subplot(121).plot(iter_rec.detach().numpy(), loss_rec.detach().numpy(), '-ro')
plt.subplot(121).plot(iter_rec, loss_rec, '-ro')
plt.xlabel("Iteration")
plt.ylabel("Loss value")
x_t = torch.linspace(-3, 3, 100)
y = func(x_t)
plt.subplot(122).plot(x_t.numpy(), y.numpy(), label="y = 4*x^2")
plt.grid()
y_rec = [func(torch.tensor(i)).item() for i in x_rec]
plt.subplot(122).plot(x_rec, y_rec, '-ro')
plt.legend()
plt.show()
输出结果:

当学习率设置为1,通过输出结果可以发现,随着迭代次数的增加,数值更新的步伐越大,损失值越大。那么如何解决这个问题呢。
3.4 学习率
通过设置学习率可以控制每次梯度下降的更新步伐大小。

代码展示:

输出结果:

当学习率设置过小为0.01时,10次迭代结果如下,会发现需要迭代多长才能梯度下降到最优值:

3.5 多尺度学习率实验
经过上次两次会发现学习率过大或者过小都不合适,那么如何找到一个最优的学习率可以提高梯度下降的速率?
使用多尺度学习率做测试,选取学习率区间0.01~0.2,在该区间划分10个等间距的学习率进行实验。
代码实现:
flag = 1
if flag:
iteration = 100
num_lr = 10
lr_min, lr_max = 0.01, 0.2 # .5 .3 .2
lr_list = np.linspace(lr_min, lr_max, num=num_lr).tolist() # 生成num_lr个等间距的数组
loss_rec = [[] for l in range(len(lr_list))]
# iter_rec = list()
for i, lr in enumerate(lr_list):
x = torch.tensor([2.], requires_grad=True)
for iter in range(iteration):
y = func(x)
y.backward()
x.data.sub_(lr * x.grad) # x.data -= x.grad
x.grad.zero_()
loss_rec[i].append(y.item())
for i, loss_r in enumerate(loss_rec):
plt.plot(range(len(loss_r)), loss_r, label="LR: {}".format(lr_list[i]))
plt.legend()
plt.xlabel('Iterations')
plt.ylabel('Loss value')
plt.show()
实验结果:

通过实验结果发现,当学习率在0.136的时候,此时会更快降低损失,y的值更快到达最小值。
3.6 momentum动量
结合当前梯度与上一次更新信息,用于当前更新
优化器中的momentum是指动量(Momentum),它是一种在优化算法中常用的技术,用于加速参数的更新。动量是在每次更新参数时,将之前的一次更新作为一部分权重加入到当前的更新中,从而使得参数的更新更加平滑,减少了震荡。
在优化过程中,优化器会根据损失函数和模型参数计算梯度。但是,由于模型参数可能存在多个局部最小值,优化器可能会在损失函数曲面上跳跃式地移动,导致参数更新剧烈,甚至出现震荡。动量技术通过引入历史更新信息,使得优化器能够更好地平滑地移动到最优解,从而减少了震荡和过拟合的风险。
在PyTorch等深度学习框架中,优化器通常会内置动量参数,用户只需要在创建优化器时指定学习率和优化器类型,框架会自动计算动量值并应用于优化过程。
3.6.1 指数加权平均
首先了解一下指数加权平均,数学思想:要求取当前时刻的平均值,距离当前时刻越近的参数值,参考价值越大,所占的权重越大,这个权重随着时间间隔的增大呈指数下降。
代码实现:
import torch
import numpy as np
import torch.optim as optim
import matplotlib.pyplot as plt
torch.manual_seed(1)
def exp_w_func(beta, time_list):
return [(1 - beta) * np.power(beta, exp) for exp in time_list]
beta = 0.9
num_point = 100
time_list = np.arange(num_point).tolist()
# ------------------------------ exponential weight ------------------------------
# flag = 0
flag = 1
if flag:
weights = exp_w_func(beta, time_list)
plt.plot(time_list, weights, '-ro', label="Beta: {}\ny = B^t * (1-B)".format(beta))
plt.xlabel("time")
plt.ylabel("weight")
plt.legend()
plt.title("exponentially weighted average")
plt.show()
print(np.sum(weights))
实现结果:

通过代码实现可以看出,距离当前时刻越远,它对当前时刻的平均值越小。
当设置多个beta值的实验结果如下:
flag = 1
if flag:
beta_list = [0.98, 0.95, 0.9, 0.8] #设置4中不同的beta
w_list = [exp_w_func(beta, time_list) for beta in beta_list]
for i, w in enumerate(w_list):
plt.plot(time_list, w, label="Beta: {}".format(beta_list[i]))
plt.xlabel("time")
plt.ylabel("weight")
plt.legend()
plt.show()

通过实验可以看出,beta 可以理解为记忆周期,当beta值越小,记忆周期越短,beta=0.8时,当到达20天的时候就不再关注远期的一个记忆值;beta值越大,记忆周期也就越长。
3.6.2 加Momentum更新公式
添加momentum更新之后的公式不仅仅只考虑当前的梯度,还要考虑上一次更新梯度乘以m的值,以及上上次梯度*
m
2
m^2
m2…,距离当前时刻越远的值,对当前的影响越小,因为m是个小于1的数。

3.6.3 momentum实验
实验一:设置momentum为0,学习率分别为0.01和0.03时函数收敛速率。
代码:
flag = 1
if flag:
def func(x):
return torch.pow(2 * x, 2) # y = (2x)^2 = 4*x^2 dy/dx = 8x
iteration = 100
m = 0.0 # .9 .63
lr_list = [0.01, 0.03]
momentum_list = list()
loss_rec = [[] for l in range(len(lr_list))]
iter_rec = list()
for i, lr in enumerate(lr_list):
x = torch.tensor([2.], requires_grad=True)
momentum = 0. if lr == 0.03 else m
momentum_list.append(momentum)
optimizer = optim.SGD([x], lr=lr, momentum=momentum)
for iter in range(iteration):
y = func(x)
y.backward()
optimizer.step()
optimizer.zero_grad()
loss_rec[i].append(y.item())
for i, loss_r in enumerate(loss_rec):
plt.plot(range(len(loss_r)), loss_r, label="LR: {} M:{}".format(lr_list[i], momentum_list[i]))
plt.legend()
plt.xlabel('Iterations')
plt.ylabel('Loss value')
plt.show()
实验结果:

实验结果分析:因为黄色部分学习率更高,所以收敛的速率比较快。
实验二:设置学习率0.01时,momentum为0.9
实验结果如下:

实验结果分析:虽然0.01的学习率比较低,但是添加momentum之后收敛速率增加;为什么会出现波浪?因为在收敛到最小值的时候仍然保留着之前的权重,所以没法快速收敛到一个平稳值。
4.SGD优化器

• params:管理的参数组
• lr:初始学习率
• momentum:动量系数,贝塔
• weight_decay:L2正则化系数
• nesterov:是否采用NAG
四、常见的其他优化器
- optim.SGD:随机梯度下降法
- optim.Adagrad:自适应学习率梯度下降法
- optim.RMSprop: Adagrad的改进
- optim.Adadelta: Adagrad的改进
- optim.Adam:RMSprop结合Momentum
- optim.Adamax:Adam增加学习率上限
- optim.SparseAdam:稀疏版的Adam
- optim.ASGD:随机平均梯度下降
- optim.Rprop:弹性反向传播
- optim.LBFGS:BFGS的改进

![[LitCTF 2023]这是什么?SQL !注一下 !](https://img-blog.csdnimg.cn/direct/ca34cbe85b7346d2a00a3f49762010d6.png#pic_center)